WYKŁAD 14
JEDNOFAZOWE
SILNIKI ASYNCHRONICZNE
14.1. Pole magnetyczne w szczelinie.
Określenie silniki jednofazowe oznacza, że są one zasilane z jednofazowej sieci prądu
przemiennego. Konstrukcyjnie posiadają one na stojanie dwa niezależne uzwojenia, przesunięte
w przestrzeni o 90 stopni fazowych. Jak omówiono w rozdziale 11, pojedyncze uzwojenie
wiodące sinusoidalny prąd o pulsacji
1
wytwarza w szczelinie maszyny pole indukcji
magnetycznej, które można przybliżyć zależnością
)
cos(
)
(
sin
)
,
(
1
1
p
t
B
t
B
m
G
(14.1)
Jeżeli drugie uzwojenie zasilimy prądem przesuniętym w fazie o /2 radianów i tak dobranej
wartości, że amplituda indukcji w szczelinie będzie taka sama jak poprzednio , to czaso-
przestrzenny rozkład indukcji wyniesie
)
sin(
)
(
cos
)
,
(
1
1
p
t
B
t
B
m
P
(14.2)
Wykorzystując tożsamości trygonometryczne uzyskuje się
)]
(
sin
)
(
sin
[
2
)
,
(
)]
(
sin
)
(
[sin
2
)
,
(
1
1
1
1
1
1
p
t
p
t
B
t
B
p
t
p
t
B
t
B
m
P
m
G
(14.3)
Wypadkowe pole w maszynie jest sumą równań (14.3) i wynosi
)
(
sin
)
,
(
)
,
(
)
,
(
1
1
p
t
B
t
B
t
B
t
B
m
P
G
(14.4)
Otrzymano falę wirującą indukcji zgodnie ze współrzędną taką samą jak w przypadku zasilania
trójfazowego. Zmiana kierunku wirowania pola magnetycznego nastąpi, jeżeli w dowolnym z
uzwojeń prąd popłynie przeciwnie niż poprzednio, czyli jeśli zmienimy biegunowość napięcia
zasilającego to uzwojenie. Uzyskanie przesunięcia prądów w uzwojeniach fazowych o kąt /2
radianów otrzymuje się poprzez szeregowe dołączenie zewnętrznego kondensatora do
jednego z uzwojeń, nazywanego dalej pomocniczym. Wirniki silników jednofazowych są bez
wyjątku klatkowe.
0
U
Rys.14.1. Schemat połączeń jednofazowego silnika indukcyjnego
Jak pokazano na rys.14.2. rezystancja zastępcza uzwojenia fazowego jest zależna od aktualnej
prędkości obrotowej – element R
/
2
/s. Oznacza to, że dobór pojemności w uzwojeniu
pomocniczym gwarantujący uzyskanie pola wirującego o stałej amplitudzie (14.4) jest
możliwy jedynie dla jednej prędkości, dla pozostałych amplitudy przepływów uzwojeń
fazowych nie będą równe jak i przesunięcie fazowe pomiędzy nimi będzie różne od /
2
.
Przyjmując, że symetryzacja prądów w silniku została dokonana dla prędkości znamionowej,
to dla innych prędkości, a w szczególności dla warunków rozruchu silnika, pole w maszynie
będzie znacznie odbiegać od pola kołowego. Mówimy wówczas, że pole w maszynie jest
eliptyczne, to znaczy, iż posiada dwie składowe o różnych amplitudach, wirujące z tą samą
prędkością co do modułu lecz w przeciwnych kierunkach. Analiza pracy maszyny jest w takim
przypadku znacznie trudniejsza, nie można bowiem określić jednego układu zastępczego
maszyny. Do obliczeń wykorzystuje się tzw. metodę składowych niesymetrycznych
(dwufazowych ) wywodzącą się z równań (14.4). Wstępną operacją poprzedzającą jej
zastosowanie jest sprowadzenie uzwojeń w maszynie do jednej, wybranej liczby zwojów.
Jeżeli uzwojeniem odniesienia jest uzwojenie główne, to prąd w uzwojeniu pomocniczym
wyrażony w skali uzwojenia głównego I
PG
jest równy
1
P
G
G
P
P
P
PG
I
z
z
I
I
(14.5)
gdzie indeksy ‘P’ i ‘G’ odnoszą się odpowiednio do uzwojenia pomocniczego i głównego.
Zgodnie z równaniami (14.3), można przyjąć, że fala współbieżna pola w szczelinie B
+
( ,t) jest
tworzona przez układ prądów
}
,
{
)
,
(
PG
G
G
I
I
j
I
f
t
B
(14.6)
a fala przeciwbieżna przez
}
,
{
)
,
(
PG
G
G
I
I
j
I
f
t
B
(14.7)
Rzeczywiste prądy płynące w uzwojeniach spełniają zależności
)
(
)
(
G
G
PG
PG
PG
P
G
G
G
I
I
j
I
I
I
I
I
I
I
(14.8)
natomiast relacje odwrotne są następujące
)
(
5
.
0
)
(
5
.
0
1
1
P
G
G
P
G
G
I
j
I
I
I
j
I
I
(14.9)
Każdy układ składowych wytwarza pole wirujące kołowe, można więc zastosować schemat
zastępczy identyczny jak dla silnika trójfazowego. Jedyną różnicą będzie zastąpienie poślizgu
s w schemacie dla składowej współbieżnej przez poślizg 2-s w schemacie dla składowej
przeciwbieżnej. Przy obliczeniach uzwojenia pomocniczego musi być oczywiście
uwzględniana obecność kondensatora połączonego w szereg z tym uzwojeniem. Schemat
zastępczy dla pola kołowego można sprowadzić stosując elementarne operacje do zastępczej
impedancji
U
Z
+
U
R
1
L
1
R
2
/
L
2
/
L
R
2
/
/ s
a.
U
Z
-
U
R
1
L
1
L
2
/
L
R
2
/
/ (2-s)
b.
Rys.14.2. Różnice pomiędzy schematem zastępczym dla składowej zgodnej i przeciwnej.
Ostatecznie bilans napięć dla obydwu uzwojeń zapisuje się jako
)]
(
)
(
[
)]
(
)
(
[
)
(
)
(
C
PG
G
C
PG
G
C
P
PG
C
P
PG
C
P
G
C
P
P
G
G
G
G
jX
Z
I
jX
Z
I
j
jX
Z
I
jX
Z
I
jX
Z
I
jX
Z
I
U
Z
I
Z
I
U
(14.10)
którego rozwiązanie pozwala na określenie amplitud i przesunięć fazowych prądów w
obydwu uzwojeniach. Impedancje uzwojenia pomocniczego sprowadzone na stronę
uzwojenia głównego Z
PG
oblicza się dzieląc Z
G
przez kwadrat przekładni (13.5)
Moc pola wirującego wytwarzająca wypadkowy moment działający zgodnie z kierunkiem
obrotów jest równa
]
2
)
(
)
[(
2
]
2
)
(
2
)
[(
]
)
(
)
[(
2
/
2
2
2
/
2
2
2
/
2
2
2
/
2
2
2
/
2
2
2
/
2
2
2
1
s
R
I
s
R
I
s
R
I
s
R
I
s
R
I
s
R
I
M
n
P
G
G
G
G
P
P
G
G
P
P
G
G
wewn
(14.11)
Prądy płynące przez rezystancję strony wtórnej oblicza się rozwiązując schematy zastępcze
dla składowej zgodnej i przeciwnej.
14.2. Identyfikacja parametrów schematu zastępczego.
Parametry schematu zastępczego silnika indukcyjnego mają wartości różniące się o dwa rzędy
wielkości. I tak proporcje pomiędzy (R
1
+R
/
2
), (X
1
+X
/
2
), X są w przybliżeniu jak 1/3/200.
Podane wartości są szacunkowe, tym niemniej w pierwszych obliczeniach można pominąć
reaktancję magnesującą X . Nie dotyczy to małych silników o mocy ułamka kW i liczbie par
biegunów p>2, gdzie prąd w stanie jałowym jest bliski wartości prądu znamionowego.
Rys.14.3. Układ połączeń i schemat zastępczy silnika indukcyjnego dla składowej współbieżnej
Wartości parametrów w gałęzi podłużnej wyznaczamy najczęściej na podstawie wyników
próby zwarcia przy zasilaniu tylko jednego uzwojenia. Okazuje się, że w typowych
maszynach zachodzi zależność R
1
≌R
/
2
oraz X
1
≌X
/
2
. Znając wartości tych parametrów
przeliczamy je na wspólną liczbę zwojów, przeważnie dla uzwojenia głównego. Stosujemy
następujące zależności:
- równoważność przepływów (prawo Ampere’a)
(14.12)
która pozwala na wyrażenie prądu I
P
w skali I
G
N
U
U
Z
+
U
R
1
L
1
R
2
/
L
2
/
L
R
2
/
/ s
I
G
I
P
C
(14.13)
- równoważność mocy
(14.14)
z której wyznaczamy przeliczone na stronę uzwojenia głównego elementy schematu
zastępczego dla fazy pomocniczej
(14.15)
gdzie R
P
oraz X
P
oznaczają poszczególne elementy schematu zastępczego dla fazy
pomocniczej.
Przypuśćmy, że chcemy dobrać tak uzwojenie pomocnicze, aby uzyskać pole kołowe
przy pewnym poślizgu s
1
. Warunki prowadzące do takiego wyniku są następujące:
- prąd w fazie pomocniczej wytwarza identyczny przepływ jak prąd w fazie głównej i jest
przesunięty w fazie o /2
(14.16)
- suma spadków napięć w obydwu fazach jest równa napięciu zasilającemu
(14.17)
Wprowadzając zależności (14.15)(14.16) otrzymuje się
(14.18)
co daje układ dwóch równań dla części rzeczywistej i urojonej
(14.19)
Rozwiązanie jest natychmiastowe i wynosi
(14.20)
Układ równań (14.20) oznacza, że dla otrzymania pola kołowego w silniku jednofazowym
kondensatorowym muszą być spełnione dwa warunki dotyczące proporcji liczby zwojów
w obydwu uzwojeniach i odpowiedniego doboru wartości zewnętrznego kondensatora C
w uzwojeniu pomocniczym. Przekształcając elementarnie drugie z równań (14.20)
otrzymamy wartość poślizgu s
1
, dla którego w silniku o ustalonej zwojności obydwu uzwojeń
jest możliwe otrzymania pola kołowego. Podstawiając ten wynik do pierwszego równania
otrzymujemy poszukiwaną wartość kondensatora w fazie pomocniczej.
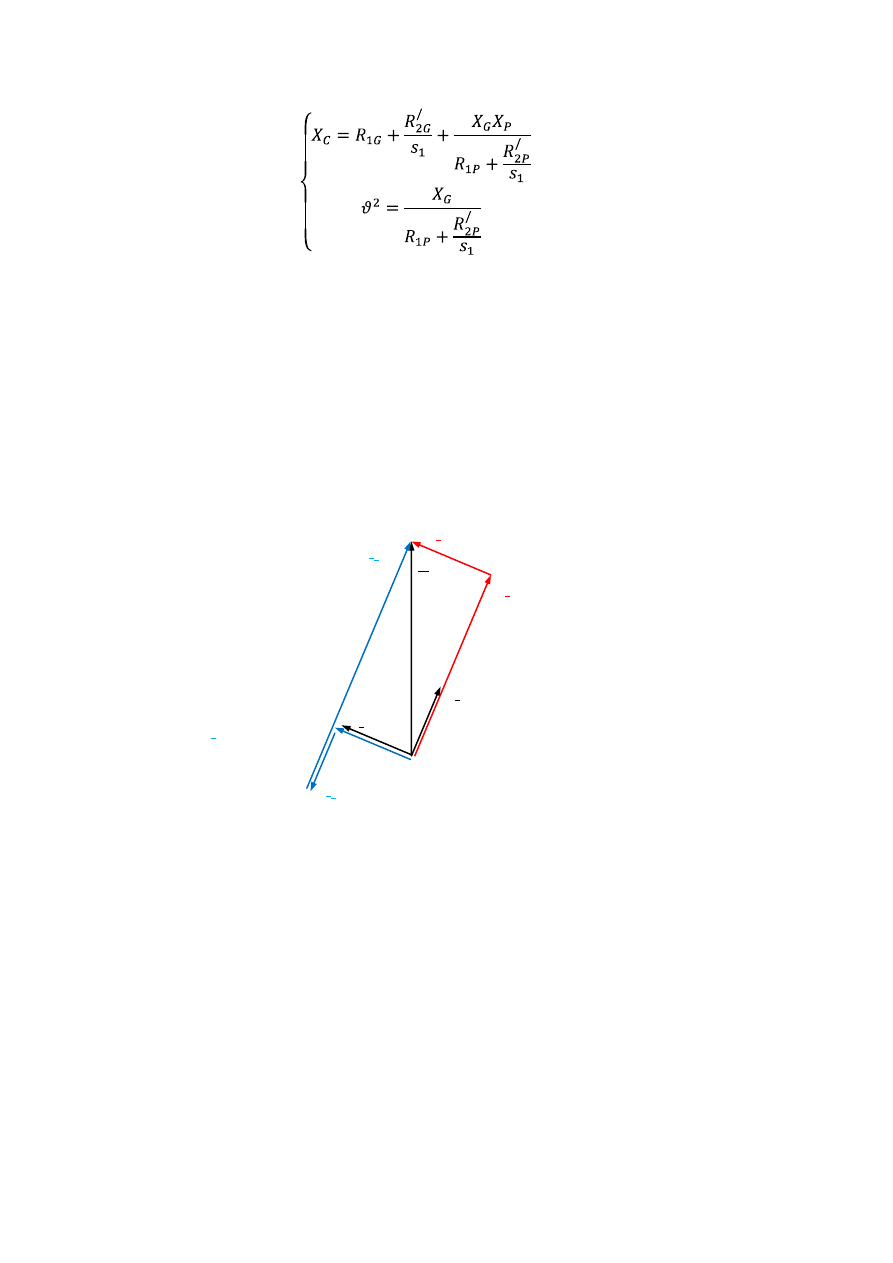
Rys.14.4. Wykres wskazowy jednofazowego silnika indukcyjnego kondensatorowego przy polu
kołowym.
-jI
PG
X
C
U
jI
G
X
G
jI
PG
X
PG
I
PG
(R
1PG
+R
/
2PG
/s
1
)
I
G
(R
1G
+R
/
2G
/s
1
)
I
PG
I
G
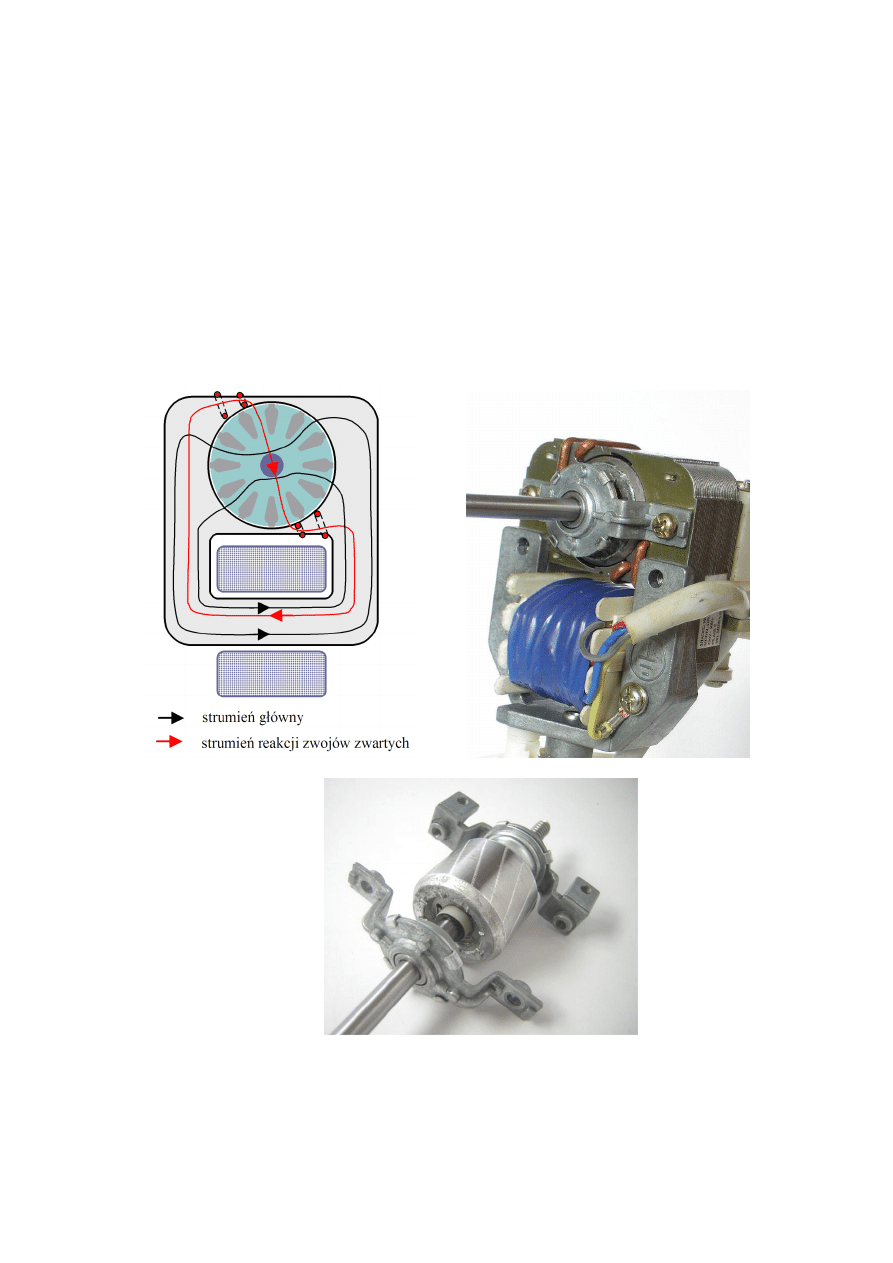
14.3. Silnik zwarto biegunowy.
Szczególnym rozwiązaniem konstrukcyjnym jest silnik zwartobiegunowy, gdzie
strumień magnetyczny jest wzbudzany za pomocą pojedynczej skupionej cewki umieszczonej
na rdzeniu stojana a wirnik jest klatkowy. W silniku tym rolę pomocniczego uzwojenia
przesuwającego w fazie strumień magnetyczny na pewnej części obwodu wirnika pełnią zwoje
zwarte. Uzyskane przesunięcie czasowe jest stosunkowo niewielkie – obydwa uzwojenia mają
charakter RL, i dlatego jakość tego silnika jest nienajlepsza – sprawność jest rzędu 10%.
Zasadniczą zaletą jest bardzo mały koszt wytworzenia, silniki te są masowo produkowane dla
najprostszych układów napędowych takich jak małe wentylatory czy sprzęt AGD
a.
b.
c.
Rys.14.5. Budowa silnika indukcyjnego zwartobiegunowego
a. rozpływ składowych strumienia magnetycznego,
b. kompletny silnik,
c. wirnik klatkowy.

Wyszukiwarka
Podobne podstrony:
14 Jednofazowe silniki asynchroniczne
Badanie jednofazowego silnika asynchronicznego klatkowego(1), SGGW TRiL, Elektrotechnika Tril Sggw
Badanie jednofazowego silnika asynchronicznego klatkowego, SGGW TRiL, Elektrotechnika Tril Sggw
Badanie jednofazowego silnika asynchronicznego doc
35 Bad.silnika asynchr.jednofaz.(1), Politechnika Wrocławska, W-5 Wydział Elektryczny, Maszyny Elekt
35 Bad.silnika asynchr.jednofaz.(3)., Politechnika Wrocławska, W-5 Wydział Elektryczny, Maszyny Elek
35 Bad silnika asynchr jednofaz (1)
Trójfazowy silnik asynchroniczny sprawko
Tabela do układu napędowego silnika asynchronicznego
silnik+asynchroniczny+sk b3ada++++si ea+z+2+podstawowych+cz ea 9cci VAR2TK5HRUCC3C6S3IJDYEHIJ7PKU3ZK
Silnik asynchroniczny, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
Silnik asynchroniczny-pierścieniwy lab1, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła
Silniki asynchroniczny klatkowy z autotransformatorm, Akademia Morska -materiały mechaniczne, szkoła
zajecia, silniki asynchroniczne, Typ
Parametry silnikow asynchronicz Nieznany
Silnik asynchroniczny
więcej podobnych podstron