
Napêdy i Sterowanie - Nr 11/2001 - str 18
18
C
yan
M
agenta
Y
ellow
blac
K
napêdy i sterowanie
Ka¿dy program steruj¹cy procesem
technologicznym jest ci¹giem instrukcji
logicznych, arytmetycznych, instrukcji
wejcia/wyjcia, odczytu, zapisu itp., re-
alizuj¹cych algorytm wpisany do pamiê-
ci sterownika. Instrukcje wykonywane s¹
krok po kroku i w kolejnoci okrelonej
przez program. Wynik dzia³ania ka¿dej
kolejnej instrukcji dostêpny jest dla in-
strukcji nastêpnej.
Jednokrotne wykonanie ca³ego pro-
gramu sterowania, pocz¹wszy od kroku
pierwszego, a skoñczywszy na instrukcji
END, okrelane jest mianem cykl stero-
wania. Czas wykonania takiego cyklu
sterowania w odniesieniu do np. 1000
kroków programu czy te¿ instrukcji pod-
stawowych (logicznych) jest jednym
z mierników szybkoci dzia³ania sterow-
nika. Nie decyduje jednak o wszystkich
mo¿liwociach systemu steruj¹cego.
W niniejszym artykule postanowilimy
opisaæ niektóre cechy sterowników kom-
paktowych Mitsubishi Electric z serii FX
(FX1S, FX1N, FX2N), które pozwalaj¹
na lepsze poznanie ich w³aciwoci dy-
namicznych.
Cykl sterowania
Tryb odwie¿ania
Po uruchomieniu sterownika (START
na rys. 1) system operacyjny zeruje reje-
stry wyjciowe, po czym odczytuje logicz-
ne stany wejciowe i zapisuje je do pa-
miêci buforowej. Rozpoczyna siê wyko-
nywanie programu od kroku nr 0 do kro-
ku nr N; od tej chwili a¿ do koñca cyklu
system wykorzystuje stany logiczne za-
pisane do pamiêci buforowej na pocz¹t-
ku cyklu.
Po wykonaniu ostatniego kroku pro-
gramu, w trakcie wykonywania instruk-
cji END, nastêpuje ostateczne przetwo-
rzenie danych, obliczenie stanów wyjcio-
wych oraz fizyczne ustawienie wyjæ dwu-
stanowych. Program wraca do kolejnego
odczytu logicznych stanów wejciowych;
uaktualnia (odwie¿a) pamiêæ buforow¹
i cykl siê powtarza. Tryb ten nazywany
jest w literaturze ang. Refresh mode w prze-
ciwieñstwie do trybu Direct mode, w któ-
rym stany wejciowe i wyjciowe przetwa-
rzane s¹ w kolejnoci wykonywania po-
szczególnych instrukcji.
Instrukcje odwie¿ania
Systemowy tryb odwie¿ania mo¿e zo-
staæ uzupe³niony za pomoc¹ instrukcji
REFXm oraz REFYn, które pozwalaj¹ na
programowe odwie¿enie stanów wejcio-
wych i wyjciowych niezale¿nie od g³ów-
nego cyklu (obiegu pêtli) pracy sterowni-
ka. W efekcie wykonania instrukcji RE-
FXm, stany logiczne 8 kolejnych wejæ
(pocz¹wszy od Xm) przepisywane s¹ do
odpowiednich rejestrów buforowych. In-
strukcja REFYn powoduje wczeniejsze
uaktualnienie wybranych omiu rejestrów
wyjciowych jeszcze przed systemowym
odwie¿eniem instrukcj¹ END. Opisana
cecha instrukcji REF pozwala na progra-
mowe przyspieszenie reakcji sterownika
na zmianê stanów wejciowych i szybsze
wysterowanie jego wyjæ.
Instrukcja END
Instrukcja ta zawsze koñczy pojedyn-
czy cykl sterowania i wystêpuje w progra-
mie steruj¹cym tylko jeden raz. W trak-
cie jej wykonania odwie¿ane s¹ stany
wejæ i wyjæ oraz zawartoæ systemowe-
go licznika czasu cyklu sterowania
(watchdog). Ponadto wykonywane s¹ inne
operacje, jak np. wszystkie niezbêdne te-
sty pamiêci programu, poprawnoæ funk-
cjonowania systemu itp.
Sterowanie przep³ywem
programu
Instrukcja FEND
Istnieje tak¿e drugi typ instrukcji koñ-
cz¹cej cykl sterowania w taki sam spo-
sób, jak instrukcja END; jest to instruk-
cja FEND (First end). Pozwala na oddzie-
lenie programu g³ównego od obszaru zaj-
mowanego przez podprogramy; mo¿e byæ
stosowana w programie wiêcej ni¿ jeden
raz.
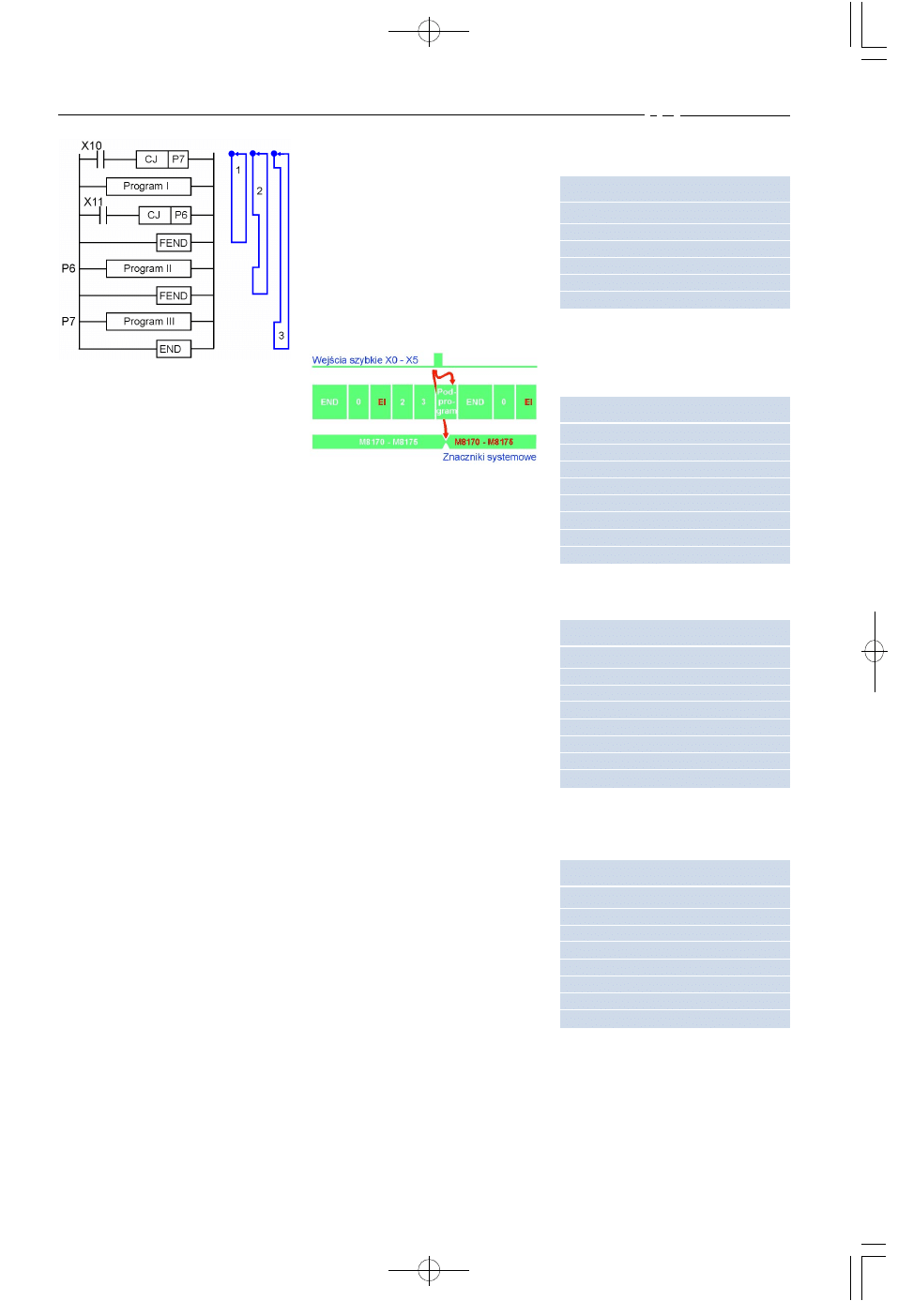
Wraz z instrukcjami skoku (np. CJ)
instrukcja FEND pozwala na podzielenie
programu g³ównego na kilka mniejszych
fragmentów (rys. 3), z których ka¿dy
mo¿e realizowaæ odrêbn¹ funkcjê. Taki
fragment programu wykonywany jest cy-
klicznie a¿ do instrukcji FEND; zatem
jego cykl sterowania mo¿e byæ znacznie
krótszy ni¿ w przypadku, gdy zawsze
wykonywany jest ca³y program.
Ma to zastosowanie w przypadku pro-
gramów steruj¹cych z³o¿onymi i szybki-
Sterowniki kompaktowe
V Mitsubishi Electric
wybrane cechy i funkcje szybkie
Adam Panasiewicz
Rys. 1. Cykl sterowania typu Refresh
mode wystêpuj¹cy w sterownikach FX
Rys. 2. Funkcjonowanie instrukcji REFX
oraz REFY w cyklu sterowania
19
C
yan
M
agenta
Y
ellow
blac
K
Napêdy i Sterowanie - Nr 11/2001 - str 19
napêdy i sterowanie
mi cyklami technologicznymi, w których
poszczególne fragmenty technologii ste-
rowane s¹ odrêbnymi, krótkimi kawa³ka-
mi programu.
Wskanik skoku (etykieta P)
Wykorzystywany jest przy sterowaniu
kolejnoci¹ wykonywania programu
i u¿ywany wraz z instrukcj¹ skoku warun-
kowego CJ(Pn) lub przy wywo³ywaniu pod-
programu CALL(Pn) (n = 0 do 63).
Instrukcja CJ(Pn) pozwala na wyko-
nanie skoku w programie steruj¹cym za-
równo do przodu, jak i do ty³u. Do ety-
kiety o tym samym adresie mo¿na odwo-
³aæ siê z wielu ró¿nych miejsc w progra-
mie. Ominiêta czêæ programu nie uak-
tualnia stanów wyjciowych, nawet
w przypadku zmiany stanu warunków
wejciowych.
W przyk³adzie na rys. 3, gdy nie jest
aktywny warunek wejciowy X10 i X11,
cyklicznie wykonywany jest Program I
do instrukcji FEND (pêtla 1).
Gdy warunek X11 zmieni stan na ak-
tywny, wykonywany jest skok do ety-
kiety P6, a cyklicznie wykonywany bê-
dzie Program I i Program II (pêtla2).
Jeli warunek X10 bêdzie w stanie ak-
tywnym, wykonywany na pocz¹tku
skok do etykiety P7 spowoduje cyklicz-
ne wykonywanie Programu III (pêtla3).
Wywo³anie podprogramu instrukcj¹
CALL (Pn) powoduje wykonanie progra-
mu umieszczonego zawsze po instrukcji
FEND i oznaczonego etykiet¹ Pn. Pod-
program koñczy instrukcja powrotu
z podprogramu (SRET).
Wejcia szybkie
Przerwania (etykieta I)
Obs³uga przerwania jest t¹ czêci¹
programu, który wykonywany jest bezpo-
rednio po przerwaniu programu g³ów-
nego przez np. wejciowy impuls dwu-
stanowy czy te¿ odpowiedni licznik cza-
su. Po odblokowaniu przerwañ (instruk-
cja EI Enable Interrupt) zmiana stanu
na wejciu X0 X5 (rys. 4) przerywa wy-
konywanie programu g³ównego, przecho-
dz¹c natychmiast do wykonania podpro-
gramu obs³ugi przerwania, oznaczonego
odpowiedni¹ etykiet¹ (I). Po wykonaniu
programu obs³ugi przerwania zakoñczo-
nego instrukcj¹ powrotu (IRET), konty-
nuowane jest wykonywanie programu
g³ównego od tego miejsca, w którym wy-
st¹pi³o przerwanie.
Wy³apywanie krótkich impulsów
Wejcia X0 do X5 s¹ wejciami szyb-
kimi, których funkcja i w³aciwoci za-
le¿ne s¹ od sposobu wykorzystania w pro-
gramie steruj¹cym. Podstawowym zasto-
sowaniem jest oczywicie normalny od-
czyt wejciowych stanów logicznych (np.
LD X0). Inn¹ cech¹ wejæ X0 do X5 jest
mo¿liwoæ u¿ycia w programie steruj¹-
cym liczników szybkich C235 do C255
(Tab. 1 Tab. 4).
Tak jak w przypadku przerwañ ze-
wnêtrznych, wy³apywanie krótkich im-
pulsów jest równie¿ cech¹ szeciu wejæ
szybkich.
Zbyt krótki czas trwania impulsów
wejciowych powoduje, i¿ s¹ niewykry-
walne przez normalny cykl sterowania.
Po odblokowaniu przerwañ instrukcj¹ EI
(Enable Interrupts) mog¹ jednak zostaæ
zarejestrowane w pamiêci sterownika.
Impulsy te (rys. 4) ustawiaj¹ w stan log.
1 odpowiednie znaczniki (X0 ®
M8170, ... , X5 ® M8175). Znaczniki te
mog¹ byæ nastêpnie odczytane przez pro-
gram i skasowane. Minimalny czas trwa-
nia przypadkowych logicznych stanów
wejciowych X, pozwalaj¹cy na ich pra-
wid³ow¹ identyfikacjê w ka¿dym cyklu
odwie¿ania wejæ, musi wynosiæ nie
mniej ni¿ czas trwania pe³nego cyklu ste-
rowania.
Natomiast przerwanie zewnêtrzne czy
te¿ proces wy³apywania krótkich impulsów
funkcjonuje poprawnie przy szerokoci
impulsów wejciowych ju¿ od ok. 10 ms.
Liczniki szybkie
System operacyjny sterowników kom-
paktowych umo¿liwia szybkie zliczanie
Rys. 3. Sterowanie przep³ywem programu
za pomoc¹ instrukcji skoku warunkowego
CJ
Rys. 4. Wy³apywanie krótkich impulsów
wejciowych; przerwanie zewnêtrzne
Tabela 1. Liczniki jednofazowe z programo-
wanym kierunkiem zliczania
C235 C236 C237 C238 C239 C240
X0 U/D
X1
U/D
X2
U/D
X3
U/D
X5
U/D
X5
U/D
Tabela 2. Liczniki jednofazowe z programo-
wanym kierunkiem zliczania i zadedykowa-
nymi wejciami Start i Reset
C241 C242 C243 C244 C245
X0 U/D
U/D
X1 R
R
X2
U/D
U/D
X3
R
R
X5
U/D
X5
R
X6
S
X7
S
Tabela 3. Liczniki dwufazowe
C246 C247 C248 C249 C250
X0 U
U
U
X1 D
D
D
X2
R
R
X3
U
U
X5
D
D
X5
R
R
X6
S
X7
S
Tabela 4. Liczniki dwufazowe z wejciami
typu A/B
C251 C252 C253 C254 C255
X0 A
A
A
X1 B
B
B
X2
R
R
X3
A
A
X5
B
B
X5
R
R
X6
S
X7
S
U wejcie zliczaj¹ce w górê
D wejcie zliczaj¹ce w dó³
R Reset wejcie zeruj¹ce licznik
S Start wejcie zezwalaj¹ce
A wejcie fazy A
B wejcie fazy B
Napêdy i Sterowanie - Nr 11/2001 - str 20
20
C
yan
M
agenta
Y
ellow
blac
K
napêdy i sterowanie
zewnêtrznych zdarzeñ, wykorzystuj¹c
w tym celu wbudowane szybkie, 32-bito-
we liczniki rewersyjne. U¿ytkownik ste-
rownika PLC korzysta z tej cechy w pro-
sty sposób; ma do dyspozycji pewn¹ iloæ
szybkich liczników (C235 C255) oraz
6 wejæ szybkich (X0 X5), przyporz¹d-
kowanych do tych liczników w sposób po-
dany w tabelach 1 4.
Tabela 1 pokazuje, i¿ sterownik dys-
ponuje np. szecioma licznikami jedno-
fazowymi o numerach C235 do C240,
którym odpowiadaj¹ wejcia X0 do X5.
Co wiêcej, wejcia te ze sob¹ nie kolidu-
j¹, pozwalaj¹c na wykorzystanie wszyst-
kich szeciu liczników jednoczenie.
Maksymalna czêstotliwoæ zliczania
mo¿e wynosiæ nawet do 60 kHz.
Inny sposób zastosowania liczników
szybkich pokazuje tabela 4. Liczniki C251
do C255 obs³uguj¹ bezporednio prze-
tworniki obrotowo-impulsowe z fazami
A/B, w których kierunek zliczania okre-
lony jest chwilowym przesuniêciem fa-
zowym pomiêdzy tymi dwoma ci¹gami
impulsów (+T/4 lub -T/4, gdzie T jest
okresem przebiegu prostok¹tnego).
Jak widaæ z tabeli 4, jednoczenie
i bez kolizji pomiêdzy wejciami mo¿na
wykorzystywaæ dwa liczniki dwufazowe.
Niezale¿nie od samoczynnego ustawienia
w licznikach kierunku zliczania, system
generuje na odpowiednich znacznikach
jednobitow¹ informacjê o tym kierunku.
Sterowanie za pomoc¹ liczników
szybkich
Wszystkie liczniki pokazane w tabe-
lach od 1 do 4 mog¹ s³u¿yæ do szybkiego
i praktycznie bezzw³ocznego sterowania
urz¹dzeniem zewnêtrznym (rys. 5).
Wraz z instrukcjami HSCS i HSCR
(High speed counter set, High speed co-
unter reset) ka¿dy licznik szybki mo¿e
ustawiæ lub skasowaæ stan dowolnego
wyjcia dwustanowego po zliczeniu za-
danej liczby impulsów zewnêtrznych.
Ustawienie i kasowanie wyjæ odbywa siê
w trybie przerwaniowym, co pozwala na
wykonanie tej instrukcji przy pe³nej szyb-
koci zliczania impulsów wejciowych.
Cykl wykonania programu nie ma wp³y-
wu na dzia³anie tej funkcji.
Argumentem instrukcji HSCR mo¿e
byæ nie tylko wyjcie Yn, ale równie¿
dowolny licznik szybki, co pozwala na
przerwaniowe zerowanie innych liczni-
ków w tym równie¿ samego siebie.
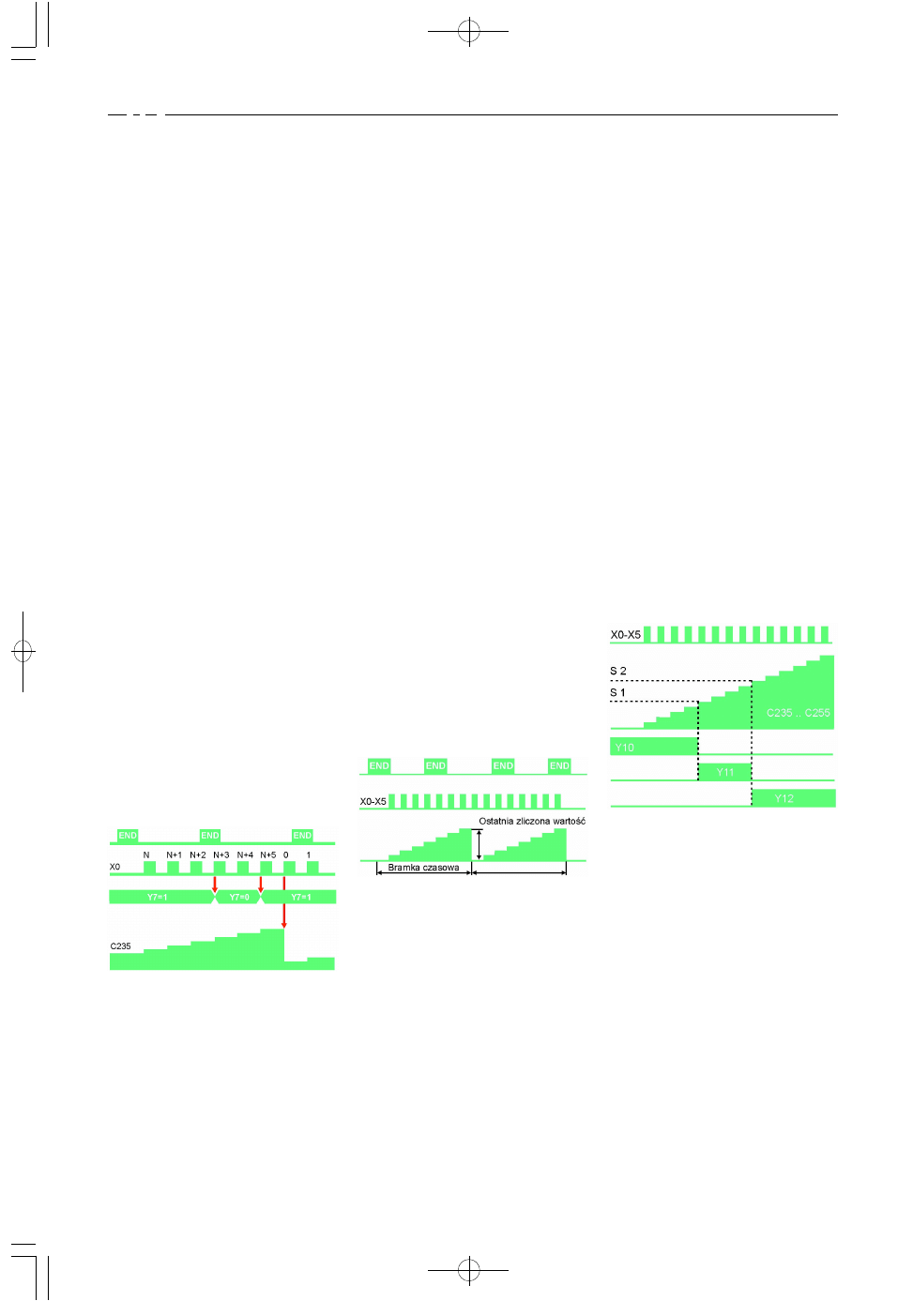
Na rys. 5 pokazano przyk³ad kasowa-
nia i ustawiania wyjcia Y7 po zliczeniu
przez licznik C235 (N+3) i (N+5) impul-
sów wejciowych instrukcj¹ [HSCR (N+3)
Y7] i [HSCS (N+5) Y7].
W tym samym przyk³adzie impuls
(N+6) zeruje zawartoæ licznika C235
instrukcj¹ [HSCR (N+6) C235], st¹d na
rys. 5 stan ten przechodzi w zero.
W sposób opisany wy¿ej instrukcja
HSCS pozwala równie¿ na odwo³anie siê
do podprogramu obs³ugi przerwania (ste-
rownik FX2N).
Instrukcje te maj¹ du¿e znaczenie np.
przy szybkim i precyzyjnym ciêciu prze-
suwaj¹cej siê tamy, drutu czy te¿ dok³ad-
nym nanoszeniu lakierów, klejów na prze-
suwaj¹cym siê materiale itp.
Instrukcja SPD
Problemem spotykanym czêsto w
przemyle jest impulsowy pomiar prêd-
koci obrotowej urz¹dzeñ wyposa¿onych
w przetworniki, takie jak turbinki, impul-
satory, enkodery itp. Metoda ta stosowa-
na jest równie¿ wtedy, gdy do pomiaru
wielkoci fizycznych wykorzystywane s¹
przetworniki z wyjciem czêstotliwocio-
wym.
Pomiar ten wymaga jednak wygene-
rowania precyzyjnej bramki czasowej (np.
10 ms, 100 ms, 1000 ms), w czasie której
zliczane s¹ impulsy wejciowe. Liczba
impulsów zliczona w zadanej jednostce
czasu, (po ewent. przeliczeniu), jest mie-
rzon¹ prêdkoci¹ obrotow¹ lub innym
parametrem fizycznym.
Stosowanie wbudowanych liczników
czasu (timerów) nie jest dobrym rozwi¹-
zaniem, gdy¿ liczniki czasu sprawdzane
s¹ programowo w cyklu sterowania, a wy-
nik zawsze obarczony jest b³êdem. Wiel-
koæ tego b³êdu zale¿na jest od czasu trwa-
nia cyklu sterowania oraz od podstawy
Rys. 6. Pomiar czêstotliwoci impulsów
wejciowych za pomoc¹ instrukcji SPD
Rys. 7. Instrukcja HSZ tryb 1; porównanie
zawartoci licznika szybkiego ze sta³ymi S1
i S2
czasu timera (1 ms, 10 ms, 100 ms).
W sterownikach z serii FX (FX1S,
FX1N, FX2N) specjalna instrukcja SPD
(Speed detection) z grupy szybkich po-
zwala dokonaæ takiego pomiaru w spo-
sób prosty i dok³adny.
W formacie instrukcji okrelamy:
numer wejcia szybkiego (od X0 do
X5);
czas otwarcia bramki w (ms);
rejestr [Dn], do którego przepisywany
jest nowy wynik.
Poniewa¿ licznik szybki jest 32-bito-
wy, a rejestr operacyjny 16-bitowy, sys-
tem przepisuje wynik pomiaru do dwóch
kolejnych rejestrów: [n] oraz [n+1].
Powy¿szy pomiar mo¿e byæ wykony-
wany nawet w szeciu kana³ach równo-
czenie (wejcia szybkie X0 X5).
Instrukcja HSZ
(High speed zone compare) jest z³o-
¿on¹ instrukcja szybk¹, wykorzystuj¹c¹
liczniki szybkie. Instrukcja ma trzy tryby
pracy:
Tryb (1) funkcjonuje jako porówna-
nie aktualnej zawartoci wybranego licz-
nika szybkiego z dwiema zadanymi war-
tociami S1 i S2.
W wyniku porównania ustawiane s¹
trzy znaczniki lub wyjcia fizyczne Yn:
[Licznik]<S1,
S2>[Licznik] >S1,
[Licznik]>S2.
Stany wyjæ Yn ustawiane s¹ metod¹
przerwaniow¹ bez zale¿noci czasowej od
cyklu sterowania.
Tryb (2) instrukcji HSZ ró¿ni siê de-
finicj¹ wartoci zadanych S1 i S2. W tym
przypadku wartoci te s¹ zadawane tabe-
larycznie, gdzie S1 okrela adres pierw-
szego rejestru, a S2 liczbê rekordów w ta-
beli (maks. 128). Ka¿dy rekord sk³ada siê
z 4 kolejnych rejestrów: w pierwszych
dwóch zapisywana jest 32-bitowa liczba
porównywana z zawartoci¹ licznika
szybkiego, w trzecim rejestrze zapisany
Rys. 5. Ustawianie wyjæ dwustanowych za
pomoc¹ instrukcji HSCS i HSCR
21
C
yan
M
agenta
Y
ellow
blac
K
Napêdy i Sterowanie - Nr 11/2001 - str 21
napêdy i sterowanie
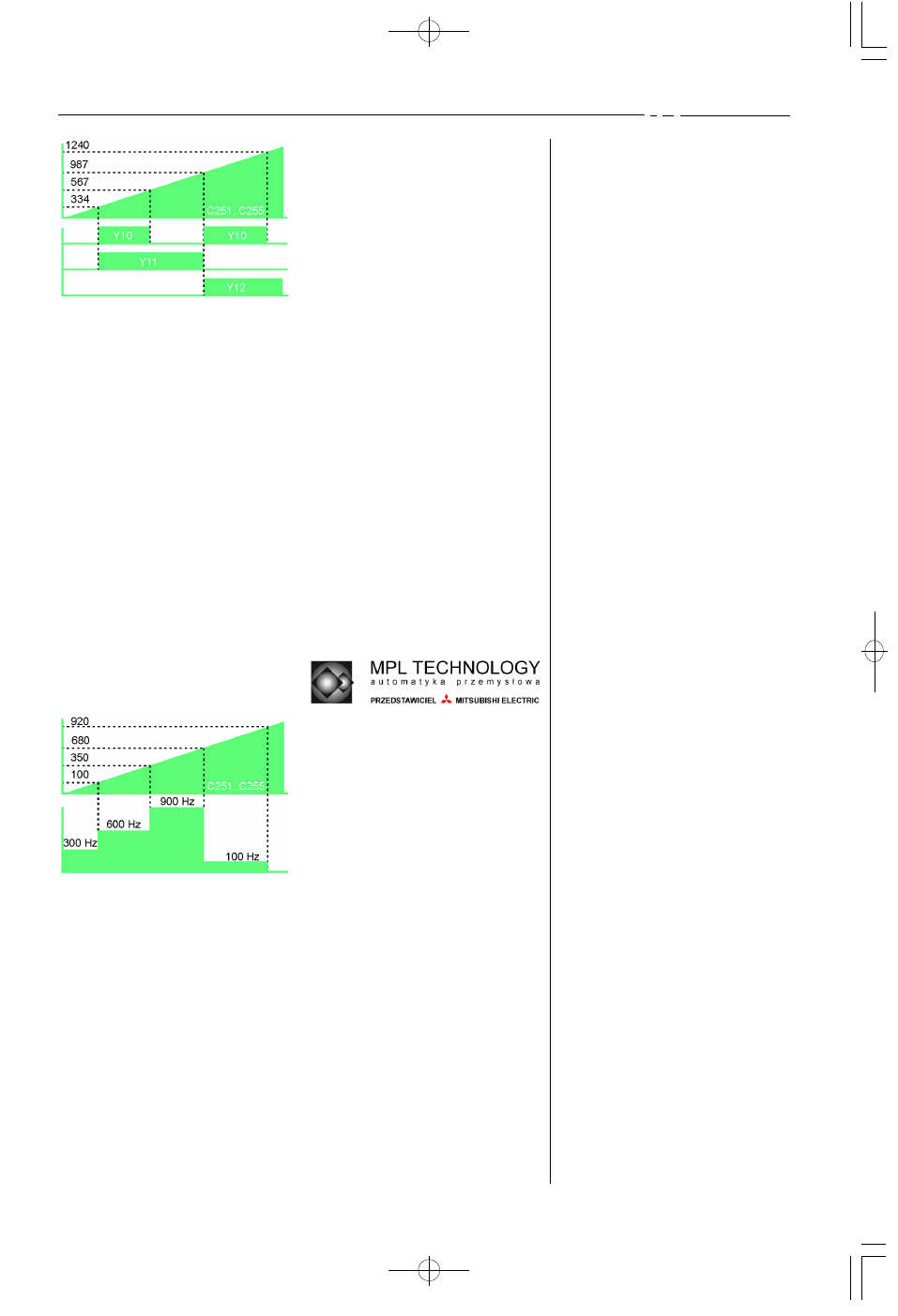
Rys. 8. Instrukcja HSZ tryb 2; porównanie
zawartoci licznika szybkiego ze sta³ymi
zadanymi tabelarycznie (maks. 128 rekor-
dów danych)
Rys. 9. Instrukcja HSZ tryb 3; porównanie
zawartoci licznika szybkiego ze sta³ymi
zadanymi tabelarycznie (maks. 128 rekor-
dów danych). Wynik porównania generuje
zadan¹ czêstotliwoæ wyjciow¹
MPL Technology Sp. z o. o.
Przedstawiciel Mitsubishi Electric
w dziedzinie
Automatyki Przemys³owej
Biuro Zarz¹du
31-444 Kraków
ul. liczna 36
tel.: (012) 632-28-85, 632-42-67, 633-
08-05
fax: (012) 632-47-82
e-mail: krakow@mpl.pl
Biuro w Pruszkowie
05-500 Pruszków
ul. Staszica 1
tel.: (022) 758-86-05, 728-86-05, fax:
(022) 759-93-08
e-mail: warszawa@mpl.pl
Biuro w Katowicach
40-203 Katowice
al. Rodzieñskiego 188
tel./fax: (032) 203-90-39
e-mail: katowice@mpl.pl
www.mpl.pl
jest adres wyjcia. W czwartym rejestrze
wpisany jest kod akcji, który decyduje
o ustawieniu b¹d wyzerowaniu stanu
wyjcia.
Tablica rekordów przetwarzana jest po
kolei; w jednej chwili aktywny i przetwa-
rzany jest tylko jeden rekord. Tak jak
w poprzednim przypadku, wynik przetwa-
rzania ustawia lub kasuje odpowiednie
wyjcie metod¹ przerwaniow¹.
Tryb (3) instrukcji HSZ jest kombi-
nacj¹ dwóch instrukcji: HSZ tryb (2) oraz
instrukcji PLSY (generacja zadanej licz-
ny impulsów o zadanej czêstotliwoci).
Jeden rekord danych sk³ada siê z 32-
-bitowej liczby porównywanej z zawarto-
ci¹ licznika szybkiego, oraz drugiej licz-
by z przedzia³u od 0 do 1000. Liczba ta
reprezentuje czêstotliwoæ wyjciow¹
w Hz generowan¹ przez instrukcjê PLSY.
W konsekwencji dzia³ania takiej instruk-
cji, poszczególne obszary liczbowe osi¹-
gane przez licznik szybki determinuj¹
czêstotliwoæ wyjciow¹ instrukcji PLSY.
Pozwala to na ukszta³towanie charakte-
rystyki statycznej i dynamicznej napêdu
typu silnik krokowy czy te¿ serwonapêd.
Opisane w niniejszym artykule cechy
oraz instrukcje pozwalaj¹ u¿ytkowniko-
wi tego sprzêtu na lepsze wykorzystanie
systemu sterowników kompaktowych
Mitsubishi Electric. Systemu, który za-
wiera w sobie o wiele wiêcej funkcji szyb-
kich, ni¿ tutaj opisano. Zosta³ jedynie
zasygnalizowany taki problem, i¿ system
programowalny PLC zawiera w sobie
równie¿ gotowe mikrooperacje, które
wykonywane s¹ ca³kowicie niezale¿nie od
cyklu sterowania. Operacje te, zwane
szybkimi, dostêpne s¹ w postaci instruk-
cji w³¹czanych do normalnego obiegu
pêtli steruj¹cej. Jednak ich wykonanie
ró¿ni siê od innych instrukcji tym, ¿e po
zainicjowaniu wykonanie odbywa siê nie-
jako obok programu g³ównego.
Takie podejcie wydatnie zwiêksza
efektywnoæ sterownika i umo¿liwia
w jednym programie równoczesne kon-
trolowanie zjawisk szybkich oraz wol-
nych. Kontrolowanie algorytmu dzia³a-
nia maszyny jako ca³oci i kontrolowa-
nie poszczególnych faz, wymagaj¹cych
szybkiego i dok³adnego pomiaru, oraz
bezzw³ocznego wysterowania. Takie ce-
chy sterowania niezbêdne s¹ we wszel-
kiego typu nowoczesnych maszynach
i urz¹dzeniach.
Wyszukiwarka
Podobne podstrony:
Mikroekonomia - wyklad 07 [08.11.2001], Ekonomia, ekonomia, Mikroekonomia
Encyklopedia Prawa - wyklad 10 [20.11.2001], INNE KIERUNKI, prawo, ENCYKLOPEDIA PRAWA
Podstawy finansow i bankowosci - wyklad 18 [23.11.2001], Finanse i bankowość, finanse cd student
Podstawy psychologii - wyklad 18 [23.11.2001], ☆♥☆Coś co mnie kręci psychologia
Podstawy organizacji i kierowania wyklad [22 11 2001]
BIULETYN Nr1 28 11 2001 (2)
1474823 2200SRM0781 (11 2001) US EN
Encyklopedia Prawa - wyklad 08 [06.11.2001], INNE KIERUNKI, prawo, ENCYKLOPEDIA PRAWA
Podstawy psychologii - wyklad 14 [09.11.2001], ☆♥☆Coś co mnie kręci psychologia
Podstawy finansow i bankowosci - wyklad 16 [16.11.2001], Finanse i bankowość, finanse cd student
Podstawy psychologii - wyklad 15 [15.11.2001], ☆♥☆Coś co mnie kręci psychologia
poprawkowe, MAD k1p 22.11.2001, KolokwI_MAD
poprawkowe, MAD k1p 22.11.2001, KolokwI_MAD
1466193 2200SRM0755 (11 2001) UK EN
Podstawy finansow i bankowosci - wyklad 15 [13.11.2001], Finanse i bankowość, finanse cd student
Podstawy finansow i bankowosci - wyklad 14 [06.11.2001], Finanse i bankowość, finanse cd student
Podstawy psychologii - wyklad 17 [22.11.2001], INNE KIERUNKI, psychologia
Podstawy psychologii - wyklad 13 [08.11.2001], ☆♥☆Coś co mnie kręci psychologia
więcej podobnych podstron