AUTOMATYKA
Zestaw IV
1.Wyznaczyć odpowiedź ma sygnał liniowo narastający x(t) = 2t regulatora PI o transmitancji
)
10
1
1
(
3
)
(
s
s
G
+
=
2.Wejście regulatora PD o transmitancji
+
+
=
r
d
p
sT
s
T
k
s
G
1
1
)
(
pobudzono sygnałem
skokowym; na wyjściu uzyskano przebieg o następujących wartościach odpowiedzi y(t):
t [s]
y(t)
0 4
1 2,736
2 2,271
3 2,099
4 2,037
10000 2,000
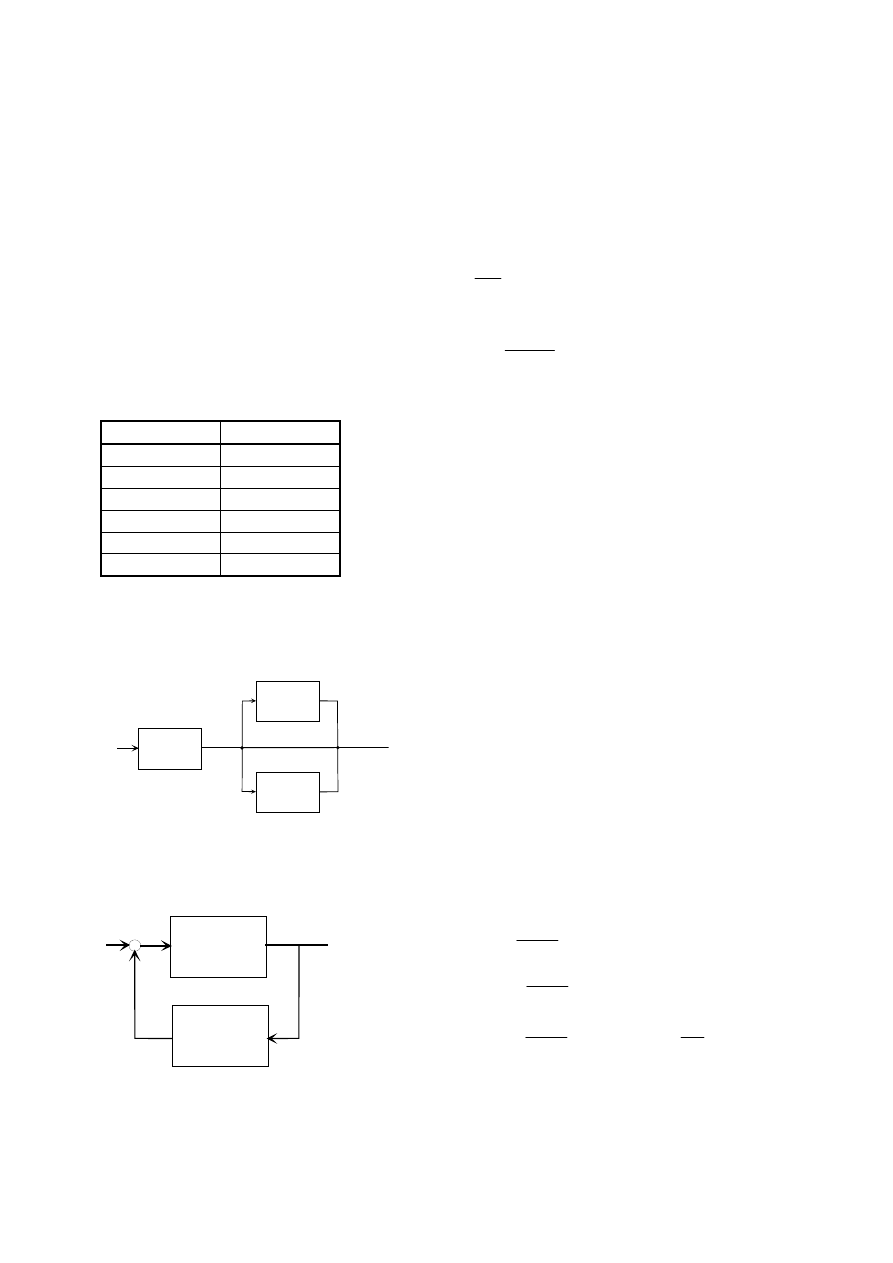
3. Jakie mają być transmitancje G1..G3, aby uzyskać regulator:
x
y
G
1
(s)
G
2
(s)
G
3
(s)
a) typu P, k
p
=3,
b) typu PI, k
p
=3,T
i
=6,
c) typu PD, k
p
=3,T
d
=1,
d) typu PID, k
p
=3,T
i
=6,T
d
=9.
4. Wyznaczyć odchyłkę statyczną dla układu regulacji przedstawionego na rysunku, jeśli
x(t)
y(t)
-
G
1
(s)
G
2
(s)
a)G
1
(s)=
1
+
Ts
k
,G
2
(s)= 0,
b) G
1
(s)=
1
+
Ts
k
,G
2
(s)= k
p
,
c) G
1
(s)=
1
+
Ts
k
,G
2
(s)=
+
s
T
k
i
p
1
1
,
Obliczyć wartości parametrów k
p
,T
d
,T
r
5. Wyznaczyć odpowiedź skokową regulatora PID dla wybranych nastaw.
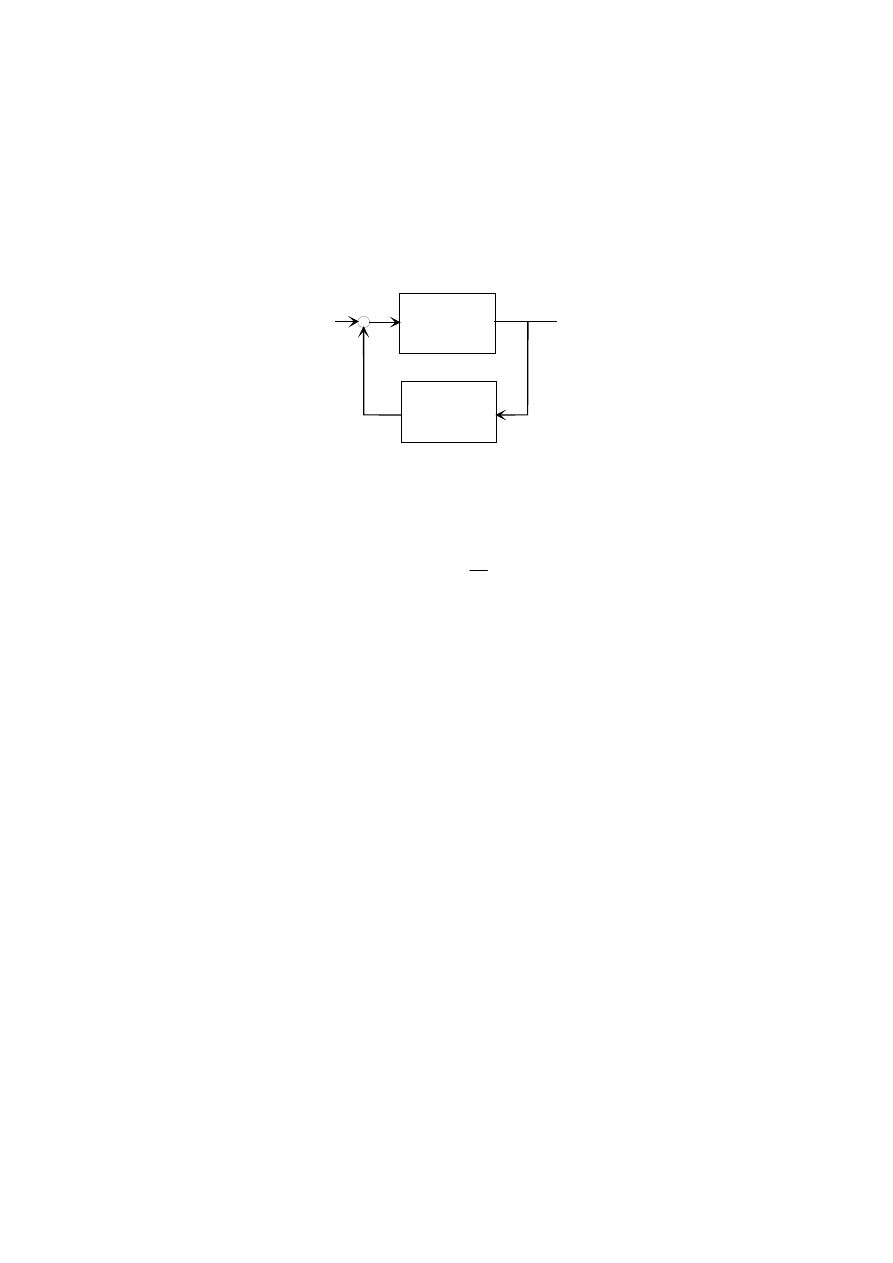
6. W układzie regulacji ( patrz rysunek ) obiekt jest członem proporcjonalnym o transmitancji
G
1
(s) = 2 ,
x(t)
y(t)
-
G
1
(s)
G
2
(s)
natomiast regulator jest typu I o transmitancji
5s
1
(s)
G
2
=
.
Wyznaczyć współczynnik wzmocnienia k
p.
regulatora PI o czasie zdwojenia T
i
= 5 sek. , tak
aby maksymalna odchyłka dynamiczna była trzykrotnie mniejsza niż w układzie z
regulatorem I. Jak zmienią się inne wskaźniki jakości regulacji np. czas regulacji,
przeregulowanie ?
Wyszukiwarka
Podobne podstrony:
Lista4
Zadania-lista4, POLITECHNIKA WROCŁAWSKA (2009), Semestr II, Fizyka 2
lista4
lista4
Lista4AM2
lista4elektronika(1), Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Fizyka
sw, lista4
Budownictwo lista4 2013
lista4 zu1
PE lista4
M1 lista4
logika lista4
Lab 13 14 15 16 Multimedia Klasa 4 2011 2012 Lista4, Informatyka, Technikum, Grafika
lista4 3
lista4 4
lista4, Zad1
lista4 9 id 270399 Nieznany
Lista4
AM lista4 zadania
więcej podobnych podstron