
STATYKA:
1.Pojęcie siły. Rodzaje siły.
2.Zasady statyki (aksjomaty).
3.Tarcie. Model tarcia Kulomba. Tarcie rozwinięte i
nierozwinięte. Współczynnik tarcia. Tarcie liny na
krążku stałym.
4.Para sił. Dodawanie par sił.
5.Redukcja układu sił. Warunki równowagi układu
sił. Szczególne przypadki układów sił i warunki ich
równowagi.
6.Środki mas brył. Sposoby wyznaczenia położenia
środków mas brył.
KINEMATYKA:
1.Równania ruchu punktu materialnego. Tor punktu
materialnego. Równanie torowe. Prędkość i
przyspieszenie.
2.Ruch stały jednostajnie
zmienny
punktu
materialnego prostoliniowy i krzywoliniowy.
3.Ruch punktu materialnego po okręgu. Prędkości i
przyspieszenia liniowe i kątowe.
4.Ruch harmoniczny punktu materialnego.
5.Ruch ciała sztywnego. Równania ruchu. Liczba
stopni swobody. Ruch translacyjny i postępowy
ciała sztywnego.
6.Ruch płaski ciała sztywnego Chwilowy środek
obrotu. Prędkość i przyspieszenie ciała sztywnego w
ruchu płaskim.
7.Ruch obrotowy ciała sztywnego dookoła sił
stałych. Dodawanie prędkości kątowych.
8.Ruch złożony punktu materialnego. Prędkości i
przyspieszenia. Przyspieszenie Coriolisa.
DYNAMIKA:
1.Zasady Newtona i prawo powszechnej grawitacji.
Zasada d’Alemberta.
2.Wahadło matematyczne i oscylator harmoniczny.
3.Pęd punktu materialnego i układu punktów
materialnych. Prawo zmienności pędu. Prawo
zachowania pędu.
4.Kręt punktu materialnego i układu punktów
materialnych. Prawo zmienności krętu. Prawo
zachowania krętu.
5.Zasada ruchu środka masy układu punktów
materialnych.
6.Momenty
bezwładności
brył.
Definicje.
Podstawowe
związki.
Twierdzenie
Steinera.
Momenty i osie główne.
7.Praca i moc siły. Praca sił potencjalnych.
Jednostka pracy i mocy.
8.Energia
kinetyczna
i
potencjalna.
Energia
mechaniczna.
Prawo
zachowania
energii
mechanicznej. Twierdzenie Koeniga.
9.Prawo zmienności Energii kinetycznej układu
punktów materialnych w czasie.
10.płaski ruch ciała sztywnego. Wahadło fizyczne.
11.Ruch kulisty ciała sztywnego. Równanie Eulera.
STATYKA:
1.Pojęcie siły. Rodzaje siły.
Siła jest miarą oddziaływania ciał na siebie. Jest to
wielkość wektorowa posiadająca wartość, kierunek,
zwrot, punkt przyłożenia
Rodzaje sił: siły najczęściej są wywierane przy
bezpośrednim zetknięciu się ciał, mogą być jednak
wywierane na odległość (siły ciążenia, magnetyczne,
elektryczne).
Siły wewnętrzne - siły wzajemnego oddziaływania
między
punktami
materialnym
(ciałami)
rozpatrywanego układu.
Siły zewnętrzne - siły przyłożone do punktu
materialnego (ciał) danego układu, a wywierane
przez inny układu punktu materialnych.
Siłą skupiona - przyłożona w punkcie lub rozłożona
(wzdłuż linii, na powierzchni, w objętości).
Siły czynne - siły wywołujące ruch ciała
swobodnego, są one niezależne od warunków, w
jakich znajduje się dane ciało.
Siły bierne - stanowią wynik oddziaływania więzów,
zależą od warunków, w jakich znajduje się dane
ciało.
Więzami nazywa się warunki ograniczające
swobodę poruszania się układu punktu materialnego.
Zgodnie z układu SI podstawową jednostką siły jest
[N], czyli siła, która masie 1kg nadaje
przyspieszenie 1m/s2.
2.Zasady statyki (aksjomaty).
I. (Zasada równoległoboku) Układ dwóch sił
równoważnych co do wartości i przeciwnego
zwrotu, działających w tym samym punkcie i
wzdłuż tej samej prostej jest w równowadze;
II. Układ dwóch sił równych co do wartości
przeciwnego zwrotu działających w dwóch różnych
punktach ciała sztywnego wzdłuż tej samej prostej
jest w równowadze (mogą poruszać się wzdłuż linii
działania);
III. Układ dwóch sił działających w jednym punkcie
jest równoważny w jednej sile działającej w tym
punkcie i będącej sumą dwóch pozostałych;
IV. (Zasada akcji i reakcji) Każdy układ sił można
zastąpić innym układem sił równoważnym jemu;
V. Dwa układy sił różniących się między sobą
układem równoważnym zeru (czyli układem
zrównoważonym) są równoważne sobie.
VI. (Zasada oswobodzenia więzów) Jeżeli ruch
rozważny układu mechanicznego jest ograniczony
innym układem mechanicznym to te inne układy
nazywamy więzami nałożonymi na równoważny
układ mechaniczny;
układ mechaniczny który nie jest
skrępowany żadnymi więzami nazywamy
układem mechanicznym swobodnym – w
przeciwnym
wypadku
układ
mechaniczny jest skrępowany;
statyka – rozważamy na przykładzie ciała
sztywnego;
każde ciało sztywne jest swobodne
(skrępowane więzami) można je uwolnić
od więzów zastępujących ich działanie
siłami reakcji (reakcja więzów);
jeżeli do układu sił dodamy siły
przeciwne to układ tamtego się nie
zmieni;
3.Tarcie.
Model
tarcia
Kulomba.
Tarcie
rozwinięte i nierozwinięte. Współczynnik tarcia.
Tarcie liny na krążku stałym.
Tarcie: jest siłą, która przeciwstawia się ruchowi
obiektów; inaczej mówiąc siła ta jest zawsze
skierowana przeciwnie do prędkości;
Model tarcia Kulomba: dwa ciała które są w
kontakcie stykowym i siły sprawcze próbują
przesunąć te dwa ciała względem siebie które
powodują poślizg na styku i przesunięcie się tych
ciał, te dwa ciał nazywamy parą cierną; własności:
siła zależna tylko od rodzaju ciał pary ciernej,
wprost proporcjonalna do siły zamykającej pary
ciernej, niezależna od: powierzchni styku ciał pary
ciernej i od prędkości wzajemnego poślizgu;
Tarcie rozwinięte: tarcie w chwili gdy nastąpi
poślizg; jeżeli siła tarcia jest mniejsza niż tarcie siły
rozwiniętej, siłą leży wewnątrz trój kata tarcia;
Tarcie nierozwinięte: tarcie na styku ciał pary
ciernej działają siły tarcia do momentu kiedy siły
sprawcze nie są wstanie doprowadzić do
wzajemnego poślizgu ciał pary ciernej; jeżeli w
parze ciernej tarcie jest nierozwinięte to reakcja
całkowita (wektor) leży wewnątrz trójkąta tarcia ( w
przypadkach zagadnień płaskich) lub wewnątrz
stożka
tarcia
w
przypadku
zagadnień
przestrzennych;
Współczynnik tarcia: (μ - mi) jest wielkością
charakteryzującą siłę tarcia. W zależności od rodzaju
tarcia, wyróżnia się odpowiednie współczynniki
tarcia; w rzeczywistych przypadkach współczynnik
tarcia zależy nie tylko od rodzaju ciał ale także od
prędkości poślizgu, są ciała dla których wartość
współczynnika wzrasta a dla innych maleje;
Tarcie liny na krążku stałym: jeżeli na krążku jest
rozwinięta lina, której końce są obciążone siłami S0
i S1 to poślizg liny przy stałej sile S0 wystąpi
wówczas gdy siła S1 przekroczy wartość S0eμα,
S1> S0eμα;
gdzie:
e - podstawa ln;
μ - współ tarcia poślizgowego;
α - kąt opasania w radianach;
Krążek stały to krążek przytwierdzony do stałego
podłoża, przez który przeplata się cięgno, które z
założenia nie ślizga się po krążku, lecz wprawia go
w ruch obrotowy. Krążek stały umożliwia tylko
zmianę kierunku siły, bez zmiany jej wartości.
4.Para sił. Dodawanie par sił.
Para sił: to dwie siły równej wartości tego samego
kierunku, przeciwnych zwrotów i różnych linii
działania; dwie siły można dowolnie przemieszczać
w płaszczyźnie jej działania; wektor pary sił jest
prostopadły do płaszczyzny pary; każda para sił
może być zastąpioną inną parą o tym samym
momencie (rozumianym jako wektor), leżąca na tej
samej płaszczyźnie; paty sił można przenosić
równolegle do płaszczyzny działania pary sił; pary
sił można dowolnie, równolegle przemieszczać w
przestrzeni; moment pary sił jest wektorem
swobodnym w przestrzeni (wartość, kierunek,
zwrot);
Momentem pary sił jest suma momentów tej pary
względem tego punktu. Moment pary sił jest równy
momentowi jednej z sił pary względem dowolnego
punktu leżącego na drugiej linii działania siły. Jeżeli
do układu pary sił doda się układ będący w
równowadze, to równowaga układu się nie zmieni.
Moment pary sił jest wektorem swobodnym na
płaszczyźnie działania pary.
Moment pary sił można obliczyć jako iloczyn
wektorowy ramienia wektorowego rozpiętego
między dwoma dowolnymi punktami leżącymi na
liniach działania sił pary i wektora siły do której
ramię wektorowe sięga;
Dodawanie par sił (nierównoległe płaszczyzny
działania): każda z par sił zastępuje wektorem
momentu ponieważ momenty par sił są wektorami w
dowolnym punkcie przestrzeni mogą dodać do
siebie pary sił;
5.Redukcja układu sił. Warunki równowagi
układu sił. Szczególne przypadki układów sił i
warunki ich równowagi.
Przez redukcję dowolnego układu sił rozumiemy
przekształcenie układu w równoważny układ
złożony z siły i pary sił (zastępujemy działanie
układu sił jedną siłą i parą sił).
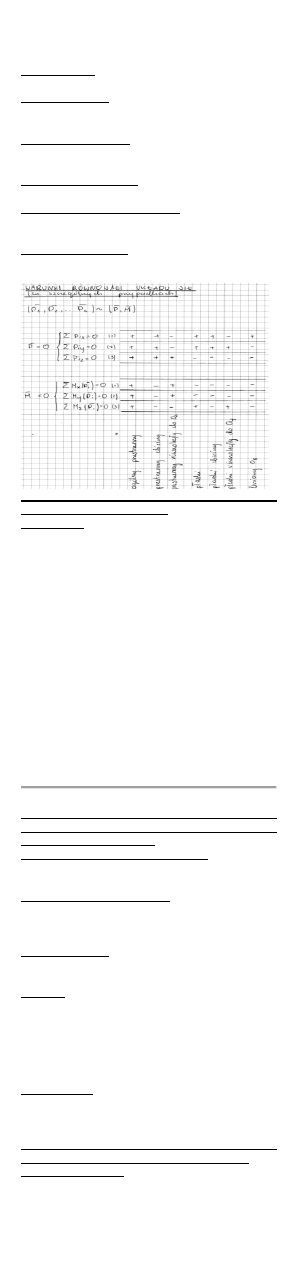
Przypadki redukcji płaskiego dowolnego układu sił:
Wg=/0,Mg=/0-układ
sprowadza się do siły
wypadkowej
równej
geometrycznie
Wg
,
przesuniętej w rejonie redukcji w takie miejsce , że
daje ona moment równy Mg.
Wg=/0, Mg=0-nie występuje para sił.
Wg=0, Mg=/0-układ redukuje się do pary sił o
momencie równym Mg.
Wg=0, Mg=0-nie ma siły i nie ma pary sił, układ jest
w równowadze.
Z I prawa Newtona o równowadze wynika że układu
jest w równowadze (spoczywa lub ruch jednostajnie
prostoliniowy), gdy na ten ukł nie działają żadne siły
lub siły działając są zrównoważone. Redukcja
układu do skrętnika może się odbyć tylko w 1
sposób, oba wektory muszą leżeć na osi centrującej
układu sił.
Ciało znajdujące się pod działaniem przestrzennego
układu sił będzie w równowadze, gdy sumy rzutów
sił na trzy osie układ współ będą równe zeru i sumy
momentów sił względem tych osi będą równe zeru.
Warunki
równowagi
(wektorowe):
(P1,
Warunki równowagi algebraiczne: Px,Py,Pz=0. Mx,
My, Mz=0.
- wektor główny nie zależy od wyboru bieguna
redukcji (w związku z tym nazywa się
niezmiennikiem redukcji);
- wektor główny układu sił jest jego wypadkowa gdy
moment główny jest równy zero;
Równowaga układu sił stwierdzona w jednym
biegunie redukcji może być stwierdzana również w
każdym innym dowolnym biegunie, w związku z
tym do stwierdzenia równowagi układu sił nie jest
potrzebna szczególny wybór bieguna, można to
uczynić względem bieguna dowolnego;
Płaski układ sił to taki którego wszystkie wektory sił
leżą na jednej płaszczyźnie;
Zbieżny układ sił to taki w którym linie działania
wszystkich sił przecinają się w jednym punkcie
(mogą być zbieżne układy przestrzenne lub płaskie);
Równoległy układ sił to taki w którym wszystkie
siły mają ten sam kierunek (układ sił równoległych
może być przestrzenny lub płaski);
Układ jednowymiarowy (liniowy) to takli w którym
wszystkie siły maja wspólną linię działania;
Twierdzenia o trzech siłach: trzy siły są w
równowadze jeżeli stanowią układ płaskich sił
zbieżnych;
Układ mechaniczny ciał sztywnych jest w
równowadze kiedy wszystkie jego ciała są w
równowadze;
6.Środki mas brył. Sposoby wyznaczenia
położenia środków mas brył.
Środek masy: punkt określony przez rozkład mas w
danym ciele lub układzie ciał. Położenie środka
masy wyraża się wzorem: (Σkrkmk/Σkmk) gdzie:
mk i rk - odpowiednio masy i promienie wodzące
poszczególnych punktowych ciał składających się na
dany obiekt. W przypadku ciągłego rozkładu masy:
r=(1/m)∫vρrdV, gdzie: V i m - odpowiednio objętość
i masa ciała, ρ - jego gęstość.
I. Metody wyznaczani środków mas ciał sztywnych
II. Metoda symetrii geometrycznej
- Ciało jednorodne to ciało w którym w każdym
punkcie tego ciała ma ono taka samą gęstość;
- Jeżeli jednorodne ciało sztywne ma płaszczone
symetrii to środek masy ciała leży na tej
płaszczyźnie;
- Jeżeli jednorodnej ciało sztywne ma oś symetrii to
na tej leży środek masy ciała;
- Jeżeli jednorodne ciało sztywne posiada środek
symetrii to on jest środkiem masy ciała;
KINEMATYKA:
1.Równania ruchu punktu materialnego. Tor
punktu
materialnego.
Równanie
torowe.
Prędkość i przyspieszenie.
Równania ruchu punktu materialnego: współrzędne
tego punktu podane, jako funkcje czasu- x=x(t). y=
y(t). z=z(t) (czas jest parametrem).
Torem punktu nazywa się linię, po której porusza się
pkt w przestrzenni. Tor pkt może być linią płaską
lub przestrzenną. Szczególnym przypadkiem ruchu
po torze płaskim jest ruch wzdłuż linii prostej.
Równania torowe: musi być dany tor i musi być
dany przebieg drogi w czasie przebytym, przez pkt
po danym torze. S=S(t)
Prędkość: wielkość wektorowa, która wyznacza
szybkość i kierunek. Jest ona równa ilorazowi
długości przebytej drogi i czasu trwania tego ruchu.
Podstawową jednostką prędkości jest 1m/s.
Prędkość jest wielkością wektorową, ponieważ dla
jej określenia oprócz wartości jest niezbędna
znajomość jej kierunku i zwrotu.
Przyspieszenie: W chwili t w ruchu pkt po linii
prostej jest równe pochodnej prędkości względem
czasu.
Jednostką
podstawową
jest
1m/s2,
Przyspieszenie jest wielkością wektorową.
2.Ruch stały jednostajnie zmienny punktu
materialnego prostoliniowy i krzywoliniowy.
Ruchem jednostajnie zmiennym nazywamy ruch, w
którym prędkość zmienia się o jednakowe wartości
w ciągu jednakowych przedziałów czasu, czyli jest
to ruch o stałym przyspieszeniu lub opóźnieniu.
Jeżeli prędkość w chwili t=0 wynosi V0, to prędkość
w chwili t wyniesie: V=V0+at
Drogę przebytą w ruchu jednostajnie zmiennym
przyspieszeniem lub opóźnieniem w czasie t określa
zależność S=V0t±(at2/2), znak dodatni oznacza
przyspieszenie
dodatnie,
a
znak
ujemny
przyspieszenie ujemne.
Ruch prostoliniowy - jest szczególnym przypadkiem
ruchu jednostajnie zmiennego (przy założeniu, że
opory spowodowane tarciem można pominąć), przy
czym stałe przyspieszenie jest równe ziemskiemu
przyspieszeniu sił ciężkości (g=9,81).
Drogę w ruchu prostoliniowym (ruch jednostajnie
przyspieszony ciała spadającego lub wyrzucanego w
górę). h=V0t±(gt2/2), gdzie + oznacza przysp g
dodatnie (ciała spadające), - przysp ujemne (ciało
wyrzucane górę)
Ruch krzywoliniowy – po wyrzuceniu ciała z
prędkością V0 pod kątem α do poziomu (przy
pominięciu oporu powietrza) ruch w jego układzie
współrzędnych x,y będzie odbywać się zgodnie z
równaniami: x=V0tcosα, y=V0tsinα-(gt2/2). Max
wysokość przy α: ymax=h=(V02sin2α/2g). Max
odległość przy α: xmax=l=(V02sin2α/g)
3.Ruch punktu materialnego po okręgu.
Prędkości i przyspieszenia liniowe i kątowe.
W ruchu jednostajnym punktu po okręgu koła
prędkość V, nazywana również prędkością
obwodową, jest stała natomiast kierunek ulega stałej
zmianie.
Droga liniowa mierzona po łuku wynosi: S=Vt.
Drodze liniowej S odpowiada droga kątowa φ, która
zakreśla promień wodzący poruszającego się pkt:
φ=S/r.
Prędkością kątową punktu (ω) nazywamy drogę
kątową (w rad), którą przebywa pkt w jednostce
Przyspieszenie ma stałą wartość an=V2/r=rω2=const
i zwrócone jest stale ku środkowi koła.
W ruchu zmiennym po okręgu koła zmienia się
wektor prędkości V (prędk obwodowa) a przez to
również prędk kątowa ω. Zależność miedzy
prędkością liniową (obwodową) a prędkością
kątową dotyczy również ruchu zmiennego.
Przyspieszenie
styczne:
at=dV/dt=d(rω)/dt=r(dω/dt)= rε
Przyspieszenie kątowe: ε=dω/dt=d2φ/dt2.
Przyspieszenie normalne: an=rω2=V2/r
Całkowite
przyspieszenie
punktu:
a=√at2+an2=r√ε2+ω4.
4.Ruch harmoniczny punktu materialnego.
Ruch, który powtarza się w regularnych odstępach
czasu
nazywamy
ruchem
okresowym
(periodycznym). Przemieszczenie cząstki w ruchu
periodycznym można zawsze wyrazić przy pomocy
funkcji sin lub cos, Ponieważ f-cje te są f-cjami
harmonicznymi, przez to ruch periodyczny można
określić jako ruch harmoniczny. Okresem ruchu
harmonicznego T jest czas trwania jednego pełnego
drgnięcia lub cyklu. Jednostką [1s]. Częścią ruchu
harmonicznego jest liczba drgań (albo cykli) na
jednostkę czasu. Częstość jest odwrotnością okresu:
f=1/T; Jednostką Hz=1/s.
Położeniem równowagi w ruchu drgającym
nazywamy położenie, w którym na pkt materialny
nie działa siła wypadkowa.
Przemieszczenie (wychylenie liniowe lub kątowe)
jest to odległość (liniowa lub kątowa) drgającego pkt
mat od położenia równowagi.
5.Ruch ciała sztywnego. Równania ruchu. Liczba
stopni swobody. Ruch translacyjny i postępowy
ciała sztywnego.
Ruch ciała sztywnego jest jednoznacznie określony
przez równania ruchu trzech pkt nie leżących na
jednej prostej. Kinematyczne równanie ruchu to
pewna zależność (lub ukł zależności), określająca
położenie ciała w przestrzeni w funkcji czasu: r=r(t).
Liczba stopni swobody to niezbędna najmniejsza
liczba parametrów do jednorazowego opisu ruchu
obiekty. Pkt materialny w przestrzeni-3 st swobody
(x,y,z); płaski ruch pkt-2 st swobody; pkt na
trajektorii=1 st swobody; bryła sztywna w
przestrzeni-6 st swobody.
Ruchem postępowym ciała sztywnego nazywamy
taki ruch, w czasie, którego dowolna linia prosta
łącząca dwa pkt ciała porusza się do siebie
równolegle.
Wszystkie punktu ciała poruszające się ruchem
postępowym mają jednakowe tory ruchu i w ciągu
tego samego okresu przebywają takie same drogi.
Prędkość wszystkich punktów mają w danej chwili
tę samą wartość i ten sam kierunek.
Ruch translacyjny – szczególny przypadek ruchu
postępowego w czasie, którego wszystkie pkt ciała
poruszają się po prostych równoległych. (Ruch
6.Ruch płaski ciała sztywnego Chwilowy środek
obrotu. Prędkość i przyspieszenie ciała sztywnego
w ruchu płaskim.
Ruchem płaskim ciała sztywnego nazywa się taki
ruch, podczas którego wszystkie pkt tego ciała
poruszają się w płaszczyznach równoległych do
pewnej stałej płaszczyzny. Wszystkie pkt ciała
leżące na prostopadłej do tej płaszczyzny mają te
same tory i prędkości. Każdy ruch płaski można
uważać za ruch postępowy figury płaskiej z
jednoczesnym jej obrotem wokół dowolnie
wybranego pkt.
Ruch
płaski
figury
określony
równaniem:
x01=x01(t); y01=y01(t); φ=φ(t), gdzie x01, y01-
współrzędne dowolnego pkt figury. Φ – kąt obrotu
układu ruchomego w stosunku do ukł nieruchomego.
Chwilowy środek obrotu - to punkt, występujący w
każdym ruchu płaskim (z wyłączeniem ruchu
postępowego), którego w danej chwili prędkość jest
równa zeru.
Prędkość dowolnego punktu figury w ruchu płaskim
można znaleźć wykreślnie jako sumę geometryczną
prędkości bieguna i prędkości w ruchu obrotowym
wokół bieguna. Jeżeli jest dana prędkość punktu 0,
wynosząca V01 i prędkość kątowa ω wokół tego pkt
to prędkość Vm pkt M wyniesie: Vm=V01+Vm01,
gdzie Vm01=ω*01m.
7.Ruch obrotowy ciała sztywnego dookoła sił
stałych. Dodawanie prędkości kątowych.
Ciało sztywne wykonuje ruch obrotowy, jeżeli dwa
pkt należące do tego ciała są nieruchome. Pkt te
określają wówczas oś obrotu. Nieruchome są także
wszystkie pkt na tej osi.
Do określenia ruchu obrotowego wokół stałej osi
wystarczy znać ruch dowolnego pkt ciała nie
leżącego na osi obrotu.
Prędkość ruchu obrotowego ciała określa się przez
badanie prędkości kątowej ω przy czym w
przypadku
ogólnym
prędkość:
-kąt obrotu ciała w
czasie Δt.
Przy ruchu obrotowym jednostajnym ω=const. Jeżeli
liczba obrotów ciała w ciągu minuty wynosi n, to
prędkość kątowa: ω=φ/t=2Πn/60.
8.Ruch złożony punktu materialnego. Prędkości i
przyspieszenia. Przyspieszenie Coriolisa.
Rozpatrując ruchomy układu, w którym porusza się
pkt. Układ ten porusza się względem innego układu,
który uważamy za nieruchomy. Ruch pkt względem
układu ruchomego to ruch względny, zaś względem
układu nieruchomego-ruch bezwzględny.
Ruch punktu związanego sztywno z układem
ruchomym względem układu nieruchomego nazywa
się ruchem unoszenia.
Prędkość bezwzględna Vb jest sumą wektorową
prędkości względnej Vw i prędkości unoszenia Vu.
Vb=Vw+Vu.
Wartość
prędkości
bezwzględnej
odpowiada
długości przekątnej równoległoboku zbudowanego
na
prędkości
względnej
i
unoszenia.
Vb=Vw2+Vu2+2Vw+Vucosα. Α-kąt między Vw i
Vu.
Przyspieszenie bezwzględne pkt w ruchu złożonym
ab stanowi sumę geometryczną trzech przyspieszeń:
względnego aw, unoszenia au oraz Coriolisa ac.
ab=aw+au+ac.
Jeżeli tor względny oraz tor unoszenia są torami
krzywoliniowymi, odpowiednie przyspieszenia są
sumami geometrycznymi przysp normalnego i
stycznego, a więc: ab=awn+awt+aun+ant+ac.
Przyspieszenie Coriolisa ac występuje w tych
przypadkach, gdy ruch unoszenia jest ruchem
obrotowym. Wektorowo przyspieszenie to można
wyrazić
w
postaci
podwójnego
iloczynu
wektorowego prędkości względnej Vw i prędkości
kątowej obrotowego ruchu unoszenia ω. ac=2ωxVw.
Przyspieszenie Coriolisa jest równe zeru, gdy
kierunek ruchu względnego jest równoległy do osi
obrotu. Jeżeli pkt porusza się w płaszczyźnie
prostopadłej do osi, przyspieszenie Coriolisa
wynosi: ac=2ωVw.
DYNAMIKA:
1.Zasady
Newtona
i
prawo
powszechnej
grawitacji. Zasada d’Alemberta.
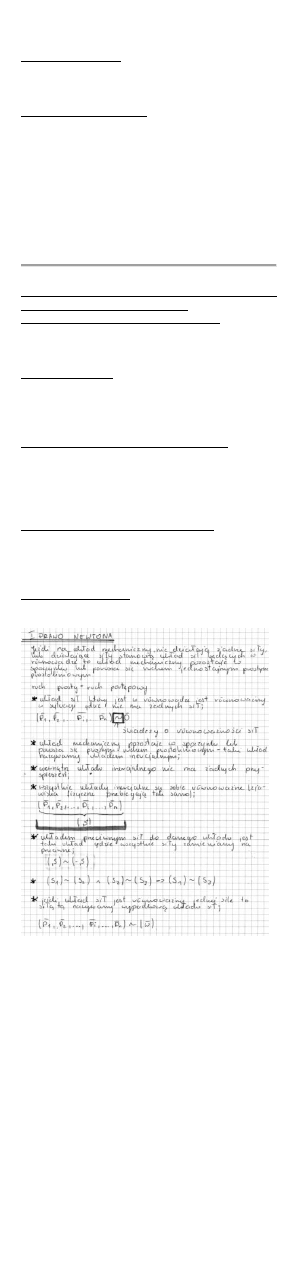
I zasada dynamiki (zasada bezwładności)
Jeśli na ciało nie działa żadna siła lub siły działające
równoważą się, to ciało pozostaje w spoczynku lub
porusza się ruchem jednostajnym prostoliniowym.
II zasada dynamiki
Jeśli siły działające na ciało nie równoważą się
(czyli siła wypadkowa jest różna od zera), to ciało
porusza
się
z
przyspieszeniem
wprost
proporcjonalnym do siły wypadkowej
III zasada dynamiki (zasada akcji i reakcji)
Oddziaływania ciał są zawsze wzajemne. Siły
wzajemnego oddziaływania dwóch ciał mają takie
same wartości, taki sam kierunek, przeciwne zwroty
i różne punkty przyłożenia (każda działa na inne
ciało).
Prawo powszechnego ciążenia głosi, że:
Między dowolną parą ciał posiadających masy
pojawia się siła przyciągająca, która działa na linii
łączącej ich środki, a jej wartość rośnie z iloczynem
ich mas i maleje z kwadratem odległości.
Zasada d' Alemberta: Siły działające na punkty
układu materialnego są równoważone siłami
bezwładności tych punktów.

2.Wahadło
matematyczne
i
oscylator
harmoniczny.
Wahadło matematyczne jest to ciało o masie
punktowej zawieszone na cienkiej, nierozciągliwej
nici. Kiedy ciało wytrącimy z równowagi, zaczyna
się ono wahać w płaszczyźnie pionowej pod
wpływem siły ciężkości.
W wahadle matematycznym poruszające się ciało
jest
punktem
materialnym
zawieszonym
na
nieważkiej, nierozciągliwej nici o długości l. Na to
ciało działo stała siła grawitacyjna. Gdy wahadło
odchylone jest z położenia równowagi, składowa
siły grawitacji wzdłuż nici jest równoważona przez
nić, a składowa prostopadła do nici działająca w
kierunku
punktu
równowagi
nadaje
ciału
przyspieszenia. Ruch ciała ograniczony nicią jest
ruchem po okręgu. Z definicji przyspieszenia
kątowego oraz z II zasady dynamiki dla ruchu pkt
materialnego po okręgu, dla kątów wyrażonych w
mierze łukowej kąta, wynikają zależności:
ε=d2φ/dt2; mglsinφ=ml2(d2φ/dt2)
Równanie
ruchu
drgającego
harmonicznego:
(d2φ/dt2)+ω2φ=0, gdzie: ω=2Π/T- częstość kołowa
drgań; T=2Π√(l/g) – okres.
Oscylator harmoniczny to ciało o pewnej (stałej)
masie wykonujące prostoliniowy ruch drgający o
stałej amplitudzie i stałym okresie. Oznacza to, że
stała jest także częstotliwość drgań i częstość
kątowa. Oscylator harmoniczny ma stałą energię -
suma energii kinetycznej i energii potencjalnej jest
stała.
1.Wahadło matematyczne to ciało którego masa
skupiona jest w jednym punkcie zawieszone na
nieważkiej i nierozciągliwej nici.
2.T=2pi pier(m/k) – okres drgań oscylatora
harmonicznego T=2pi pier(l/g) – okres drgań
wahadła matematycznego
3Wahadło raz wprawione w ruch wykonuje aż do
zatrzymania drgania o niezmieniającym się okresie
zwanym okresem drgań własnych.Tę właściwość
wahadła nazywamy izochronizmem.Odkrył ją
Galileusz.
4. Rezonans to zjawisko przekazywania energii
pomiędzy ciałami o tej samej lub zbliżonej
częstotliwości drgań własnych. G=4pi2*l/T2
5.Aby wychylić ciało z położenia równowagi
musimy wykonać pracę. W=kx2/2=Ep
6.
Całkowita
energia
przy
maksymalnym
wychyleniu
ciała
z
położenia
równowagi.
Ec=Ep+Ek Ek=k/2*(a2-x2)
7. Ruch drgający –jest to ruch którego przyczyną
jest działanie siły zmieniającej się z czasem.
8. Przykłady ruchu drgającego:bicie serca,struna w
gitarze,wahadlo w zegarze,tloki w silniku.
9.Ruch drgający harmoniczny-jest to ruch zmienny
w którym działająca na ciało siła jest wprost
proporcjonalna do wychylenia i zwrócona w stronę
położenia równowagi.F=k*x
10.Cechy ruchu drgającego harmonicznego:
a)ruch okresowy,
b)prędkość ciała ulega zmianie,zmienia się wartość i
zwrot,
c)do położenia równowagi ciało zbliża się ruchem
jednostajnie przyspieszonym a oddala ruchem
jednostajnie opóźnionym,
d)w
położeniach
maksymalnego
wychylenia
prędkość wynosi 0,
e)
podczas przechodzenia
przez
położenie
równowagi prędkość ciała jest maksymalna.
3.Pęd punktu materialnego i układu punktów
materialnych. Prawo zmienności pędu. Prawo
zachowania pędu.
Pędem (ilością ruchu) punktu materialnego
poruszającego się z prędkością V nazywamy wektor
mi równy iloczynowi masy i prędkości V.
Przyspieszenie a=dV/dt, więc równanie ruchu pkt
materialnego, na który działa siła P, można
przedstawić w postaci P=(d/dt)(mv)
Pochodna wzgl czasu pędu pkt materialnego jest
równa sile działającej na ten pkt. W przypadku gdy
na pkt działa kilka sił, siłę P należy uważać za ich
wypadkową.
Zasada pędu pkt materialnego mówi, że elementarny
przyrost pędu jest równy impulsowi elementarnemu
siły Pdt, d(mV)=Pdt
Zasada zachowania pędu: Jeżeli wektor główny
układu sił zewnętrznych działający na układ
materialny jest równy zeru, to pęd tego układu
materialnego jest stały.
Pędem układu n pkt materialnych nazywa się sumę
geometryczną wektorów pędu poszczególnych jego
pkt. B=ΣmV
Zasada pędu ukł pkt materialnych mówi, że
elementarny przyrost pędu ukł jest równy
geometrycznej sumie elementarnych impulsów
wszystkich sił zewnętrznych działających na dany
ukł pkt. dB=ΣPdt
4.Kręt punktu materialnego i układu punktów
materialnych. Prawo zmienności krętu. Prawo
zachowania krętu.
Kręt pkt materialnego to moment wektora pędu.
Moment krętu względem zadanego pkt określony
jest zależnością: K=rxmV, gdzie: r-promień pkt
materialnego m wzgl pkt O.
Zasada krętu: pochodna wzgl czasu krętu pkt
materialnego wzgl dowolnego pkt O jest równa
momentowi siły działającej na pkt materialny wzgl
tego dowolnego pkt O.
Jeżeli na pkt materialny działa kilka sił, to należy
uwzględnić sumę momentów wszystkich tych sił
względem danej osi, co można zapisać w postaci
skalarnej: (dKx/dt) =ΣMxP; (dKy/dt) =ΣMyP;
(dKz/dt) =ΣMzP, gdzie Kx, Ky, Kz – wartość krętu
pkt materialnego względem osi x,y,z. Mx , My , Mz
– wartości momentów sił Pi względem osi x,y,z.
Jeżeli moment siły (lub suma momentów sił)
działającej na pkt materialny względem dowolnego
pkt jest równy zeru, to kręt względem tego pkt jest
stały.
Krętem ukł pkt materialnych względem punktu O
nazywamy sumę geometryczną krętów wszystkich
pkt ukł względem tego punktu. K=Σ(rxmV), ri –
wektor, promień pkt o masie mi wzgl pkt O.
Zasadę krętu ukł pkt materialnych można wyrazić
następująco: pochodna względem czasu krętu układu
pkt materialnych względem pewnego pkt O jest
równa
sumie
momentów
wszystkich
sił
zewnętrznych
układu
względem
tego
pkt.
(dK/dt)=ΣMoP
5.Zasada ruchu środka masy układu punktów
materialnych.
Jeżeli xc, yc, zc są współrzędnymi środka masy
(ciężkości) układu, Qc jego przyspieszeniem, zaś M
jest sumą mas wszystkich pkt materialnych ukł, to
zachodzi równość wyrażająca zasadę ruchu środka
masy, wg której ruch środka masy układu pkt
materialnych odbywa się tak, jakby skupiona w nim
była masa całego układu i działała ….
Geometryczna suma wszystkich sił zewnętrznych
układu. Mac=ΣP
Stąd wynikają następujące zależności skalarne:
M(d2xc/dt2) =ΣPx; M(d2yc/dt2) =ΣPy, M(d2zc/dt2)
=ΣPz.
Po prawej stronie tych równań występują sumy
rzutów wszystkich sił zewnętrznych działających na
układ na odpowiednią od współrzędnych.
6.Momenty
bezwładności
brył.
Definicje.
Podstawowe związki. Twierdzenie Steinera.
Momenty i osie główne.
Każde ciało można myślowo podzielić na dowolne
małe elementy, które możemy uważać za pkt
materialne. Momentami bezwładności ciała o masie
m względem płaszczyzn xy, yz, xz nazywamy
granice, do których dążą sumy iloczynów mas
elementów ciała dm przez kwadraty ich odległości
od tych płaszczyzn, gdy liczba elementów rośnie
nieograniczenie, zaś ich wymiary dążą do zera.
∫z2dm, ∫x2dm, ∫y2dm
Jeżeli pod całką zamiast kwadratów odległości
elementów od płaszczyzny występują kwadraty
odległości elementów od osi, wówczas całka
przedstawiać będzie moment bezwładności ciała
względem danej osi.
Ix=∫e2dm=∫(y2+z2)dm=∫y2dm+∫z2dm;
Iy==∫(z2+x2)dm=∫z2dm+∫x2dm;
=∫(x2+y2)dm=∫x2dm+∫y2dm.
Moment bezwładności względem osi jest równy
sumie
momentów
bezwładności
względem
dowolnych
dwóch
wzajemnie
prostopadłych
płaszczyzn, przecinających się wzdłuż tej osi.
Momentem odśrodkowym ciała względem dwóch
prostopadłych do siebie płaszczyzn nazywamy
następujące wyrażenia: Ixy==∫xydm; Iyz=∫yzdm;
Izx=∫zxdm.
Twierdzenie Steinera: Moment bezwładności ciała
względem dowolnej osi jest równy momentowi
bezwładności względem osi do niej równoległej z
przechodzącej przez środek masy Ixc zwiększonemu
o iloczyn masy ciała przez kwadrat odległości ‘a’
między tymi osiami. Ix=Ixc+ma2
Jeżeli momenty odśrodkowe dowolnego ciała
względem
trzech
par
płaszczyzn
układu
współrzędnych są równe zeru, to osie są głównymi
osiami bezwładności tego ciała. Jeżeli początek tych
osi znajduje się w środku masy ciała, to osie
nazywają się głównymi centralnymi osiami
bezwładności ciała.
Jeżeli ciało ma oś symetrii, to oś ta jest jego główną
centralną osią bezwładności, jeżeli natomiast ciało
ma płaszczyznę symetrii to każda prosta prostopadła
do tej płaszczyzny i przechodząca przez środek
masy jest główną osią bezwładności.
7.Praca i moc siły. Praca sił potencjalnych.
Jednostka pracy i mocy.
Jeżeli na pkt materialny poruszają się po dowolnym
torze S działa siła P to praca elementarna wykonana
przez siłę P na drodze (przesunięciu) dS jest równa
iloczynowi skalarnemu tej siły przez elementarną
drogę.
dl=PdS lub dl=PdScosα, gdzie α-ką utworzony
między linią działania siły, a styczną do toru.
Jeżeli Px, Py, Pz są składowymi siły P w kierunkach
osi x,y,z zaś dx,dy,dz są składowymi przesunięcia w
tychże kierunkach, to pracę elementarną w układzie
współrzędnych prostokątnych można wyrazić jako:
dL=Pxdx+Pydy+Pzdz
zaś
praca
całkowita
wykonana przez siłę P na drodze krzywoliniowej
AB będzie określona przez całkę krzywoliniową.
L=∫Pxdx+Pydy+Pzdz.
Jeżeli ruch odbywa się po linii prostej, zaś kierunek
siły P tworzy stały kąt α z tą prostą wówczas praca
całkowita wykonana przez siłę P na drodze
prostoliniowej S jest równa iloczynowi rzutu siły na
kierunek drogi przez tę drogę. L=PScosα
Jeżeli w pewnym obszarze siła P działająca na pkt
materialny zalezy tylko od położenia tego pkt i praca
tej siły przy przesunięciu punktu materialnego z pkt
A do pkt B nie zależy od toru ruchu, to mówimy, że
mamy do czynienia z polem potencjalnym. Przy
przyspieszeniu
w
polu
potencjalnym
pkt
materialnego o masie ‘m’ po drodze AB, praca
wykonana przez siłę ciężkości ‘mg’ jest określona
wyłącznie przez różnicę wartości współrzędnych
zA-zB na początku i na końcu ruchu. L=mg(zA-zB).
Jeżeli praca elementarna na drodze ds. zostanie
wykonana w czasie elementarnym dt to zgodnie z
dl=PdS / dl=PdScosα moc w danej chwili t jest
równa iloczynowi skalarnemu siły i prędkości pkt jej
przyłożenia. N=(dl/dt)=P(dS/dt)=PV, gdzie V -
prędkość pkt przyłożenia.
Jeżeli ruch odbywa się pod działaniem stałej siły i ze
stałą prędkością wzdłuż lini prostej, wówczas moc
jest również stałą i wynosi: N=PV
Jednostka mocy wynika z iloczynu jednostki pracy i
jednostki czasu. Ponieważ jednostką pracy jest dżul
(J), więc jednostką mocy jest J/s=wat (W). W
technice używa się jednostki 1000 razy większej,
czyli kilowat (kW)
PRACA-skalarna wielkość fizyczna określająca
wartość energii wydatkowanej na przemieszczenie
ciała
materialnego
z
pewnego
położenia
początkowego do położenia końcowego.
Jednostki: [Nm] ,[J],[kGm]
MOC-stosunek pracy do czasu w jakim ta praca
została wykonana
Jednostki : [W] , [kWh] ,[Km]
8.Energia kinetyczna i potencjalna. Energia
mechaniczna.
Prawo
zachowania
energii
mechanicznej. Twierdzenie Koeniga.
Energia kinetyczna Ek pkt materialnego o masie ‘m’
poruszającego się z prędkością V jest określona
zależnością: Ek=mV2/2.
Zasada
energii
kinetycznej:
przyrost
energii
kinetycznej pkt materialnego jest równy pracy
wykonanej przez siłę działającą na pkt materialny na
jego drodze. Można to określić zależnością:
(mV2B/2)-(mV2A/2)=EkB-EkA=LAB, gdzie LAB-
praca siły P na drodze AB.
W przypadku ruchu, podczas którego na pkt
materialny działa wyłącznie siła ciężkości, przyrost
energii kinetycznej jest równy pracy siły ciężkości, a
ta z kolei jest równa różnicy energii potencjalnej
położenia początkowego i końcowego. A więc
zachodzi równość: EkB-EkA=EpA-EpB.
A stąd wynika, że suma energii kinetycznej i
potencjalnej pkt materialnego poruszają się w polu
potencjalnym nazywaną energią mechaniczną ma
wartość stałą. EkB+EkA=EpA+EpB=const
Stwierdzenie to wyraża zasadę zachowania energii
mechanicznej, stanowiącej szczególny przypadek
ogólnej zasady zachowania energii.
Energia potencjalna - energia, jaką ma układ ciał
umieszczony
w
polu
sił
zachowawczych,
wynikająca z rozmieszczenia tych ciał. Równa jest
pracy, jaką trzeba wykonać, aby uzyskać daną
konfigurację
ciał,
wychodząc
od
innego
rozmieszczenia, dla którego umownie przyjmuje się
jej wartość równą zeru. Konfigurację odniesienia dla
danego układu fizycznego dobiera się zazwyczaj w
ten sposób, aby układ miał w tej konfiguracji
minimum energii potencjalnej. Energię potencjalną
mierzy się w dżulach [J]
Ep=W=mgh.
Twierdzenie Koeniga: Energia kinetyczna ciała
sztywnego jest równa sumie energii kinetycznej
środka masy w którym jest skupiona cała masa ciała
i energii kinetycznej chwilowego ruchu obrotowego
ciała wokół osi przechodzącej przez środek masy
Ek=(mV2c/2)+(Icω2/2), gdzie Vc-prędkość środka
masy. Ic-moment bezwładności wzgl chwilowej osi
obrotu. Ω-prędkość kątowa ciała.
Energia potencjalna
Potencjał pola potencjalnego wyznaczonego co do
stałej
Pole sił to obszar przestrzeni Euklidesa z którym
związana jest dana siła
Energia kinematyczna
Energia kinetyczna punktu materialnego
Energia kinetyczna ciała sztywnego
9.Prawo zmienności Energii kinetycznej układu
punktów materialnych w czasie.
Energią kinetyczną ukł n pkt materialnych jest
połową sumy i iloczynów mas wszystkich pkt
układu
przez
kwadraty
ich
prędkości.
Ek=(1/2)ΣmV2.
Jeżeli w chwili t1 energia kinetyczna układu wynosi
Ek1, a w chwili t2 odpowiednio Ek2, to różnica
Ek2-Ek1 jest równa sumie prac wykonanych przez
siły zewnętrzne i wewnętrzne działające na pkt
układu. Ponieważ przy sztywnym układzie pkt
materialnych siły wewnętrzne nie wykonują pracy,
więc różnica Ek2-Ek1 jest równa sumie prac sił
zewnętrznych działających na pkt materialne układu
w przedziale czasu t2 t1 Ek2-Ek1=L12.
Zasada energii dla ukł pkt materialnych: przyrost
energii kinetycznej ukł pkt materialnych w
dowolnym przedziale czasu jest równy sumie prac
sił zewnętrznych działających na układ w tym
przedziale czasu.
Na zmianę energii kinetycznej punktu pracują siły
czynne i potencjalne.
Prawo zmienności dla układu pkt. Materialnego
10.płaski ruch ciała sztywnego. Wahadło
fizyczne.
Ruch płaski ciała sztywnego to ruch podczas,
którego wszystkie pkt ciała poruszają się w
płaszczyznach równoległych do pewnej nieruchomej
płaszczyzny zwanej płaszczyzną kierującą.
Wszystkie pkt leżące na prostej prostopadłej do
płaszczyzny
kierującej
poruszają
się
po
równoległych bokach i mają taką samą prędkość i
przyspieszenie.
Wahadło fizyczne – Bryła sztywna mogąca
wykonywać
obroty
dookoła
poziomej
osi
przechodzącej ponad środkiem ciężkości tej bryły
pod działaniem siły grawitacyjnej.
Wzór na okres drgań wahadła fizycznego:
T=2Π√(I/mgd)=2Π√(l0/g);
l0
–
długość
zredukowana wahadła l0=I/md; d-długość od pkt
zawieszenia do środka ciężkości, I-moment
bezwładności ciała wzgl osi obrotu
Wahadło fizyczne:
Bryła sztywna mogąca wykonywać obroty dookoła
poziomej osi przechodzącej ponad środkiem
ciężkości tej bryły pod działaniem siły grawitacyjnej
.
Wahadło Rewersyjne:
O dwóch równoległych osiach zawieszenia i
regulowanym rozkładzie masy, używany do
wyznaczania przyspieszenia ziemskiego.
Wahadło fizyczne i rewersyjne maja taki sam okres
drgań
11.Ruch kulisty ciała sztywnego. Równanie
Eulera.
Ruchem kulistym nazywamy taki ruch ciała
sztywnego, w którym jeden pkt ciała jest
nieruchomy. W ruchu tym wszystkie pkt poruszając
się po powierzchniach współśrodkowych kul,
których środkiem jest ten nieruchomy pkt. Ruch
kulisty ciała można w danej chwili uważać za obrót
wokół pewnej osi zwanej chwilową osią obrotu,
przechodzącą przez nieruchomy pkt. Jeżeli ciało
wykonuje ruch kulisty wokół pkt 0 i w danej chwili
osią obrotu jest oś l to prędkość pkt M ciała określić
można iloczynem: v=w*hM,w-chwilowa pręd
kątowa ciała, hM-odleglość pkt M od od osi
l.Równanie Eulera W mechanice klasycznej
opisuje ono ruch qk(t) układu ciał i przyjmuje
postać: d/dt* (δL/ δq’k) – (δL/ δqk)=0 gdzie L
(q1…qn….q1’…qn’;t) jest funkcja lagrangea
opisującą rozważany układ. Otrzymujemy je z
zasady najmniejszego działania i dla znanej funkcji
lagrangea są one układem n równań różniczkowych
zwyczajnych na funkcje qk(t). (δL/ δqk)=Fk- siła
uogólniona, (δL/ δq’k)=pk- pęd uogólniony.
Ruch kulisty to taki gdzie jeden punkt jest stały ciała
sztywnego. Równania Eulera to równania dynamiki,
to równanie piszemy w układzie związanym z
ciałem i ten układ musi być układem głównym osi
bezwładności.
q
dt
q
d
dt
q
d
q
dt
q
d
*
Wyszukiwarka
Podobne podstrony:
Mechanika techniczna ściąga
Ściąga mech2, Szkoła, Semestr 3, Semestr 3, Mechanika techniczna II, mechana
mechanika sciaga 1, Polibuda (MiBM), Semestr III, III semestr, jurek, 3 semestr, Mechanika techniczn
Mega ściąga z teorii, Szkoła, Semestr 3, Semestr 3, Mechanika techniczna II, chomika od barta, Mecha
Mechanika techniczna(12)
Mechanika techniczna(1)
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Ostwald M Podstawy mechaniki Mechanika techniczna
Tarcie, Materiały, Inżynieria Środowiska, Semestr 2, Mechanika techniczna, egzaminy
Maszyny-koło projekt, Technologia chemiczna, Maszynoznawstwo i mechanika techniczna, ogólne materiał
TARCIE, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, MECHANIKA !!, mechanika techniczna - labor
Mechanika gruntów Ściąga 2
Mechanika Techniczna I Opracowanie 06
Mechanika Techniczna I Skrypt 1 2 1 Okreslenie i rodz
Mechanika Techniczna I Statyka Płaski Układ Sił
mechanika techniczna, kolo mohra
więcej podobnych podstron