1
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
Komputerowa Analiza Konstrukcji
Materiały pomocnicze dla studentów
I
Wstęp
Informacje szczególnie istotne wyróżniono czerwoną ramką, np.:
Przemieszczenia węzłów są zawsze podawane w układzie globalnym.
Hasła pomocy programu Robot dotyczące danego zagadnienia wyróżniono zieloną ramką, np.:
typ konstrukcji, konwencja znakowania, konwencja znakowania - elementy prętowe,
konwencja znakowania - elementy powierzchniowe
W tekście użyte są skróty: ES = Elementy Skończone, MES = Metoda Elementów Skończonych.
1.
Podstawowe informacje
Niniejsze opracowanie ma na celu uzupełnienie i utrwalenie wiadomości uzyskanych na zajęciach.
Nieodzowne do opanowania umiejętności posługiwania się programem są obecność na zajęciach i
konsultowanie projektów w trakcie semestru.
Intencją autora nie jest przedstawianie dokładnych instrukcji krok-po-kroku (odnaleźć je można w
plikach pomocy), ale zwrócenie uwagi na najistotniejsze kwestie przy rozpoczynaniu nauki programu.
Dodatkowo wskazano miejsca, w których mogą wystąpić błędy i problemy.
W czasie pracy z programem Robot należy pamiętać o tym, że taka jak każda inna aplikacja
komputerowa nie jest on pozbawiony błędów. Ponadto używana w nim Metoda Elementów
Skończonych jest metodą przybliżoną, a co za tym idzie uzyskanie przy jej pomocy wiarygodnych
wyników wymaga doświadczenia i rzetelnego przeprowadzania obliczeń.
1.1.
Czym jest Autodesk Robot Structural Analysis?
Program Autodesk® Robot™ Structural Analysis 2012 (określany skrótowo jako program Robot) jest
zintegrowanym programem graficznym służącym do modelowania, analizowania i wymiarowania
różnych rodzajów konstrukcji. Program pozwala na tworzenie modelu konstrukcji, przeprowadzenie
obliczeń przy zastosowaniu MES, prezentację i weryfikację otrzymanych wyników, wymiarowanie
poszczególnych elementów konstrukcji oraz tworzenie dokumentacji dla policzonej i zwymiarowanej
konstrukcji.
Wyróżniony fragment tekstu stanowi zakres przedmiotu Komputerowa Analiza Konstrukcji.
Na szczególną uwagę zasługuje możliwość integracji programu Robot z aplikacją Autodesk Revit.
Umożliwia to jednoczesne tworzenie dokumentacji architektoniczno-budowlanej i analizę statyczną
konstrukcji.
Ze względu na liczne występowanie w programie danych tabelarycznych, umożliwiono w wielu
miejscach łatwe kopiowanie danych z i do programu typu Excel.
1.2.
Skąd pobrać program?
http://students.autodesk.com/ zakładka Free software. Login i hasło identyczne jak przy pobieraniu
programu AutoCAD. Konto musi być powiązane z mailem @wilis.pg.gda.pl. Problemy z aktywacją lub
pobraniem programu można rozwiązać posługując się formularzem w zakładce Support -> Ask a
question. Produkt należy aktywować w ciągu 30 dni od instalacji.
Po zainstalowaniu programu należy sprawdzić zainstalować wszystkie aktualizacje – Pomoc-
>Dostępne aktualizacje programu…
2
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
1.3.
Dostępna pomoc
•
Ambroziak A., Kłosowski P.: Robot structural analysis. Podstawy obliczeń. Wydawnictwo PG,
Gdańsk 2010
•
Pomoc wbudowana w programie - klawisz F1, uruchamiana w przeglądarce internetowej.
•
Podręcznik użytkownika Robot_podr_pl_2011.pdf w folderze:
C:\Program
Files\Autodesk\Autodesk
Robot
Structural
Analysis
Professional
2012\Documents
•
Konsultacje wg rozkładu godzin.
1.4.
Warunki zaliczenia
Wg regulaminu przedmiotu.
2.
Typ konstrukcji (typ elementu), stopnie swobody, konwencja
znakowania
2.1.
Używane typy konstrukcji
Bez względu na wykonywane zadanie projektowe należy umieć opisać wszystkie typy konstrukcji (i
zawiązane z nimi elementy skończone) z zakresu przedmiotu:
•
Ramy płaskie
•
Kratownice płaskie
•
Ruszty
•
Kratownice przestrzenne
•
Ramy przestrzenne
•
Konstrukcje w PSN
•
Konstrukcje w PSO
•
Konstrukcje osiowo-symetryczne
Szczególną uwagę należy zwrócić na liczbę stopni swobody w węźle, jakie są to stopnie
swobody, ilość węzłów w elemencie, różnica między stopniem swobody a siłą wewnętrzną.
typ konstrukcji, konwencja znakowania, konwencja znakowania - elementy prętowe,
konwencja znakowania - elementy powierzchniowe.
2.2.
Zmiana typu konstrukcji
Typ konstrukcji można zmienić poleceniem z menu głównego Geometria->Typ konstrukcji.
Przy zmianie typu konstrukcji należy pamiętać o tym, że pewne parametry są przy tym procesie
przyjmowane automatycznie. Należy zwrócić szczególną uwagę m.in. na zmianę definicji zadanych
podpór.
3.
Okno programu. Ekrany.
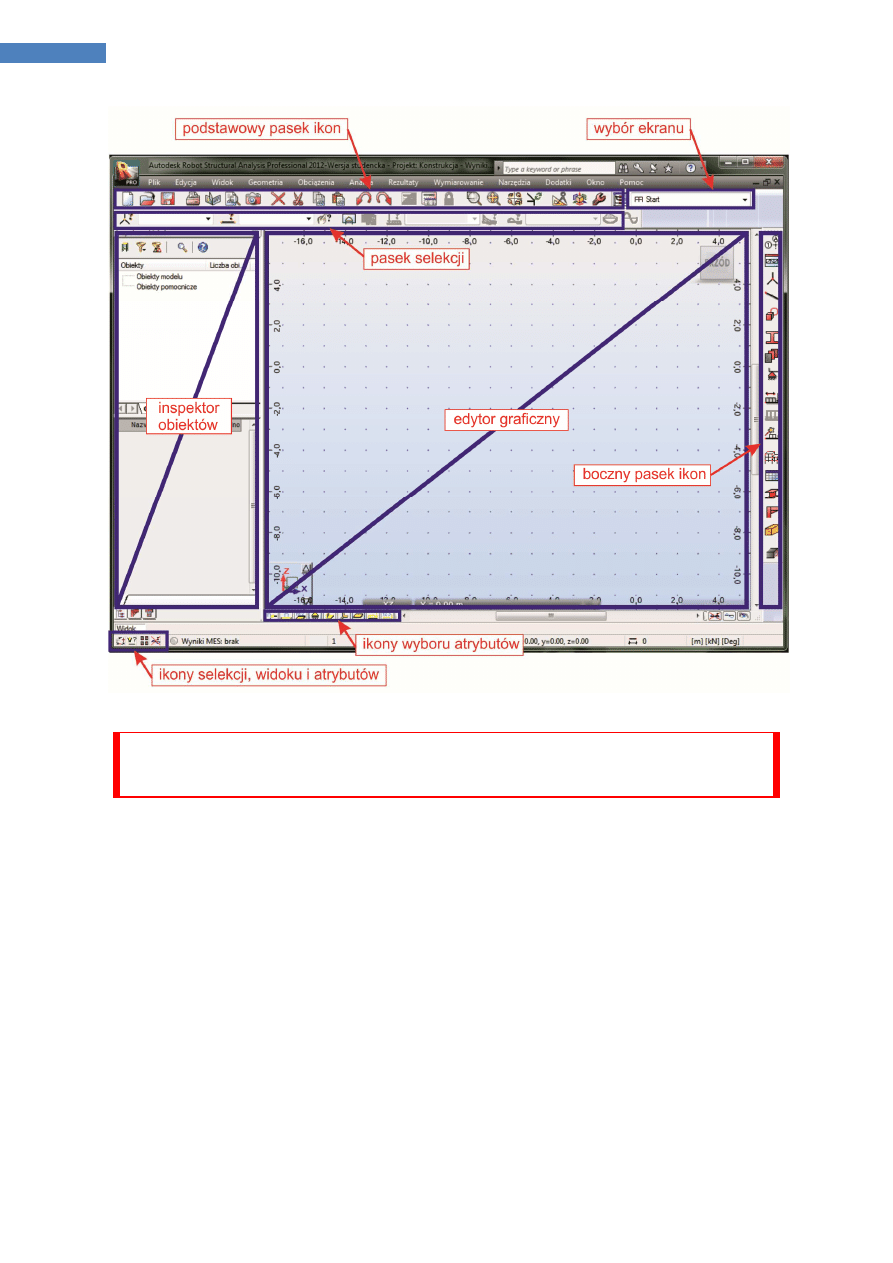
Poniżej pokazano główne okno programu wraz z nazwami podstawowych jego części. Nazwy te będą
pojawiać się konsekwentnie w dalszej części tekstu.
W prawym górnym rogu edytora graficznego znajduje się tzw. View Cube ułatwiający nawigację w 3
wymiarach (szczegóły działania w pomocy).
Przydatny przy pracy z programem jest Inspektor obiektów - włączanie/wyłączanie: przycisk na pasku
narzędzi
lub z paska menu Okno->Okno Inspektora.
Zadania programu Robot są podzielone na tzw. ekrany. Dostępne ikony i okna są zależne od
wybranego ekranu i typu konstrukcji.
3
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
4.
Układ globalny a układ lokalny. Znaczenie osi Z. Jednostki.
W programie osie układu globalnego oznacza się wielkimi literami X,Y,Z, a układów lokalnych
małymi x,y,z. Zdarzają się od tej reguły wyjątki, szczególnie przy przeglądaniu rezultatów należy
zwracać na to uwagę.
Kierunki lokalnych układów współrzędnych (w prętach tylko lokalną oś x) można zmieniać używając
poleceń menu Geometria->Charakterystyki->Kierunek lokalny prętów lub Kierunek lokalny paneli.
Lokalne układy współrzędnych nie są domyślnie widoczne. Można je włączyć klikając odpowiednią
ikonę wyboru atrybutu lub zaznaczając odpowiednie pole w oknie Wyświetlanie atrybutów.
W programie oś Z jest domyślnie przypisana wymiarowi wysokości konstrukcji. Wzdłuż tej osi (ze
zwrotem ujemnym) działają siły grawitacji, dostosowane są do niej aktywne stopnie swobody w
poszczególnych typach konstrukcji.
Program umożliwia definiowane geometrii i obciążeń w dowolnych jednostkach z dowolną
dokładnością. Aktualnie wybrane jednostki można odczytać w prawym dolnym rogu okna głównego
programu. Modyfikacja jednostek odbywa możliwa jest po wybraniu Narzędzia->Jednostki i formaty…
z menu głównego.
5.
Dostępne widoki. Atrybuty wyświetlania.
Dostępne są widoki 2D, 2D/3D, 3D. W widokach 2D oraz 2D/3D aktywna jest siatka punktów
ułatwiająca rysowanie konstrukcji. Aktualny widok można zmienić po kliknięciu w ikonę
przedstawiającą układ współrzędnych w lewym dolnym rogu edytora graficznego.
4
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
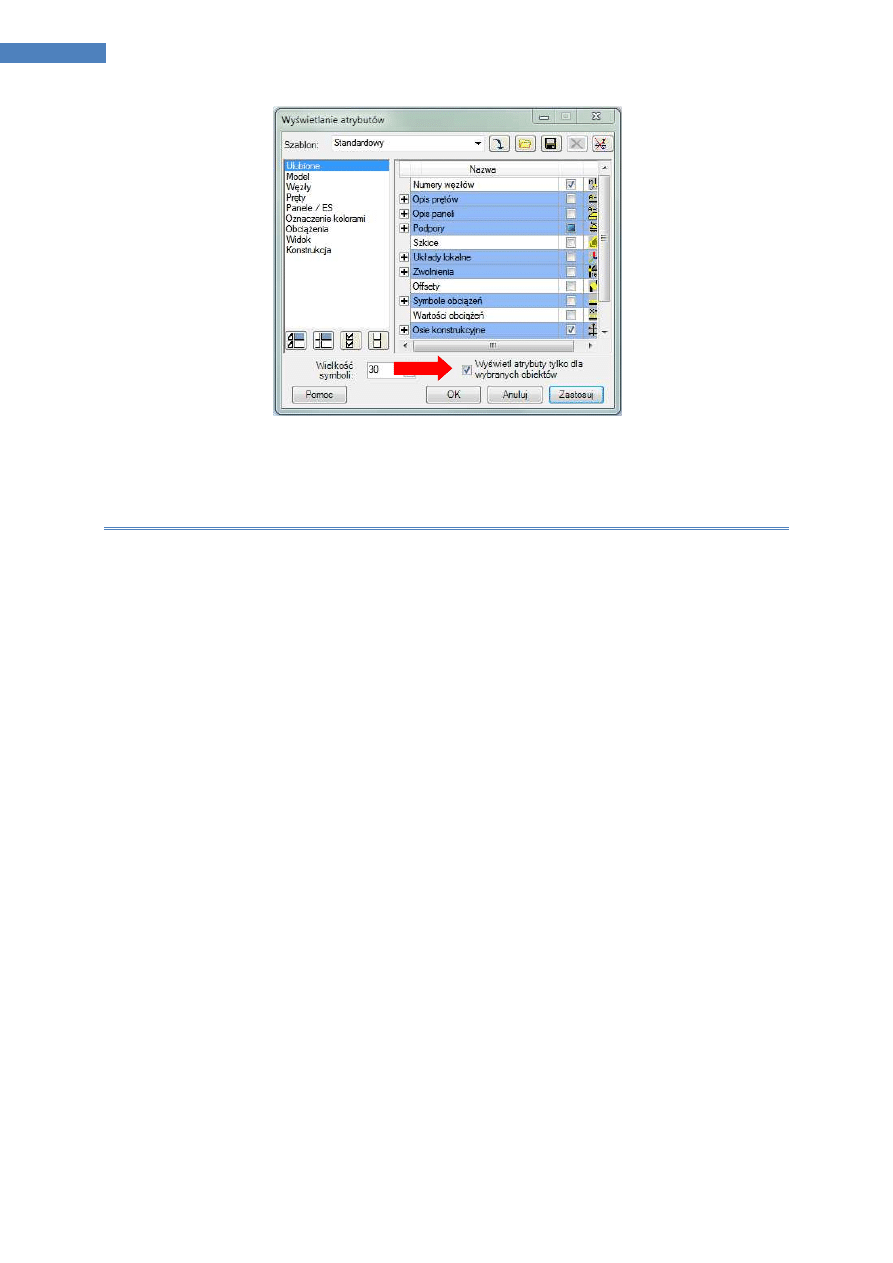
Wyświetlane atrybuty można zmienić posługując się skrótami umiejscowionymi pod lewym dolnym
rogiem edytora graficznego lub w oknie Wyświetlanie atrybutów (dostępnym m.in. z menu
kontekstowego edytora graficznego pod poleceniem Wyświetl...).
6.
Częste problemy
6.1.
Działanie podpór, zwolnień itp. nie odpowiada ich nazwom
Należy pamiętać o tym, że nazwy pewnych składników modelu nadawane są przez
użytkownika. Gdy pracujemy nad dostarczonym przez innego autora projekcie lub na obcym
komputerze, trzeba upewniać się co do tego, czy np. podpora nazwana utwierdzeniem jest
faktycznie utwierdzeniem takim jak rozumiemy je z punktu widzenia Mechaniki Budowli.
6.2.
Za dużo wyświetlonych informacji.
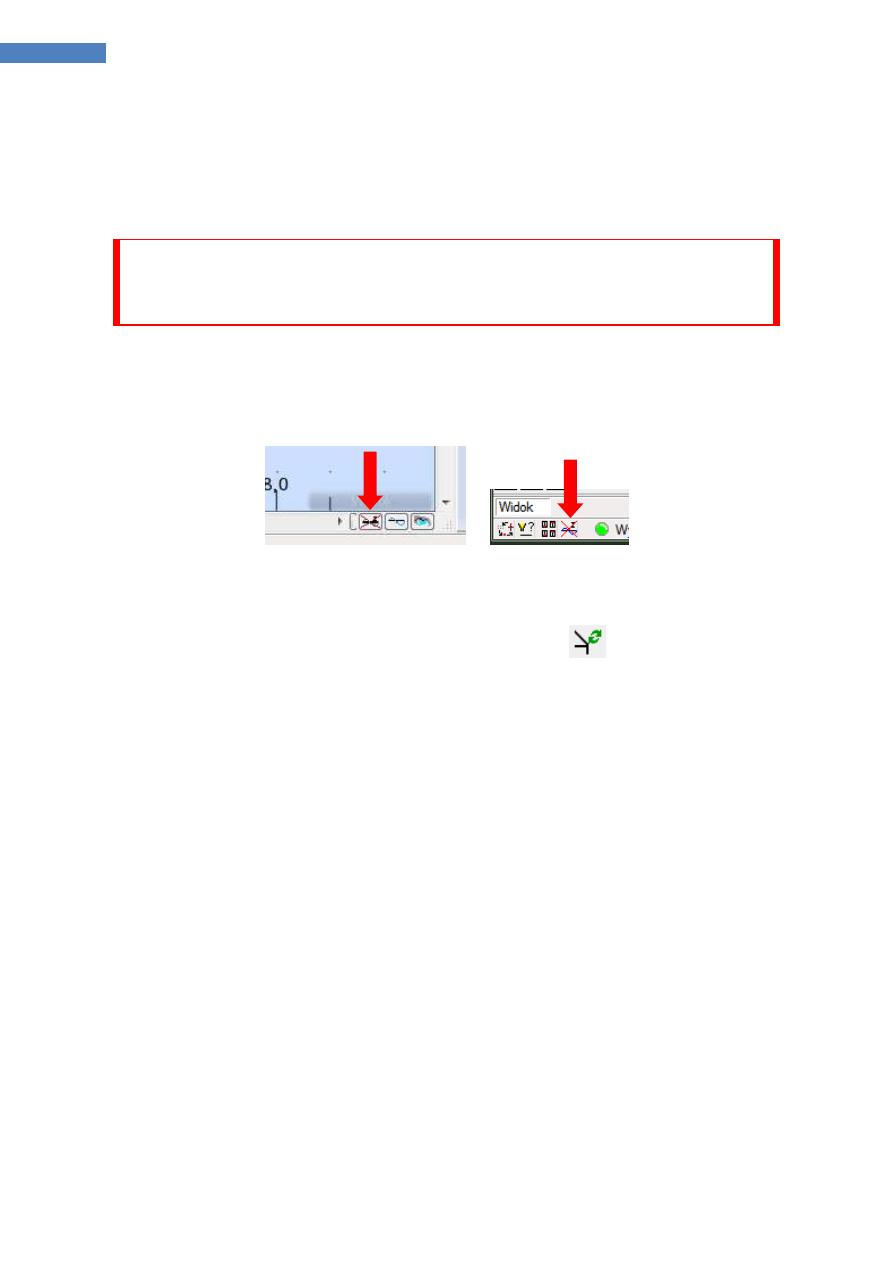
Może się zdarzyć, że np. mimo pracy w ekranie Pręty widać na konstrukcji wynikowe wykresy. W celu
powrotu opcji wyświetlania do standardowych opcji należy kliknąć ikonę Domyślne ustawienia
widoczności znajdującą się w dolnym prawym rogu edytora graficznego oraz wśród ikon selekcji,
widoku i atrybutów.
6.3.
Konstrukcja się nie wyświetla lub nie widać wprowadzonych zmian
Z menu kontekstowego (prawy przycisk myszy w edytorze graficznym) należy wybrać opcję
Początkowe, która spowoduje że widoczna będzie cała konstrukcja.
Należy odświeżyć rysunek przy pomocy przycisku Przerysuj rysunek
znajdującego się na pasku
ikon podstawowych.
Jeśli włączony jest widok 2D, konieczna może być zmiana wyświetlanego poziomu. Zmienić go można
przy pomocy strzałek znajdujących się obok układu współrzędnych lub po otwarciu okna Widok.
Jeśli nie widać wprowadzonych zmian (np. offsetów, zwolnień, podpór), należy upewnić się czy
włączone jest ich wyświetlanie w oknie Wyświetlanie atrybutów.
Należy upewnić się, że plik na którym pracujemy nie posiada atrybutów „tylko do odczytu” lub
„archiwalny”.
6.4.
Część przycisków jest nieaktywna
Problem występuje szczególnie często przy definiowaniu nowych obciążeń. W tym przypadku należy
upewnić się że żadne elementy konstrukcji nie są zaznaczone oraz że jest aktywny tylko jeden
przypadek obciążenia (ten, do którego chcemy dodawać obciążenia).Można również zminimalizować
tabelę obciążeń.
Jeśli nie przynosi to rezultatu, należy spróbować zmienić aktywny ekran i powrócić do tego, w którym
definiowane są obciążenia.
6.5.
Jak odnaleźć węzeł lub element o znanym numerze
Upewniamy się, że żadna część konstrukcji nie jest zaznaczona.
Otwieramy okno Wyświetlanie atrybutów i zaznaczamy w nim wyświetlanie numerów węzłów lub
prętów. Zaznaczamy opcję Wyświetl atrybuty dla wybranych obiektów.
5
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
W pasku selekcji wpisujemy numer węzła lub pręta który nas interesuje. Wybrany węzeł lub element
jest wyraźnie widoczny na tle konstrukcji i wyróżniony swoim numerem.
II
Układy prętowe
1.
Osie konstrukcji
Jeśli zdefiniowane osie konstrukcji się nie wyświetlają, należy sprawdzić ustawienia w oknie
Wyświetlanie atrybutów lub wprowadzić przynajmniej jedną oś konstrukcyjną wzdłuż każdej z osi
X,Y,Z globalnego układu współrzędnych.
Osie konstrukcji są przydatne przy pracy z wielokondygnacyjnymi obiektami oraz przy
zaawansowanej selekcji elementów.
2.
Definiowanie konstrukcji
Istnieje możliwość import geometrii konstrukcji z programu AutoCAD. W tym celu stworzony rysunek
należy zapisać w formacie *.dxf, a następnie otworzyć w programie Robot Plik->Otwórz projekt (typ
pliku *.dxf).
2.1.
Węzły
Nie ma konieczności oddzielnego definiowania węzłów w konstrukcji, są one automatycznie
tworzone przy dodawaniu prętów. Możliwość ta jest przydatna wtedy, gdy chcemy dodać węzeł
niezwiązany z dyskretyzacją MES, ale np. potrzebny do szybkiego sprawdzenia ugięć w przęsłach
elementów.
2.2.
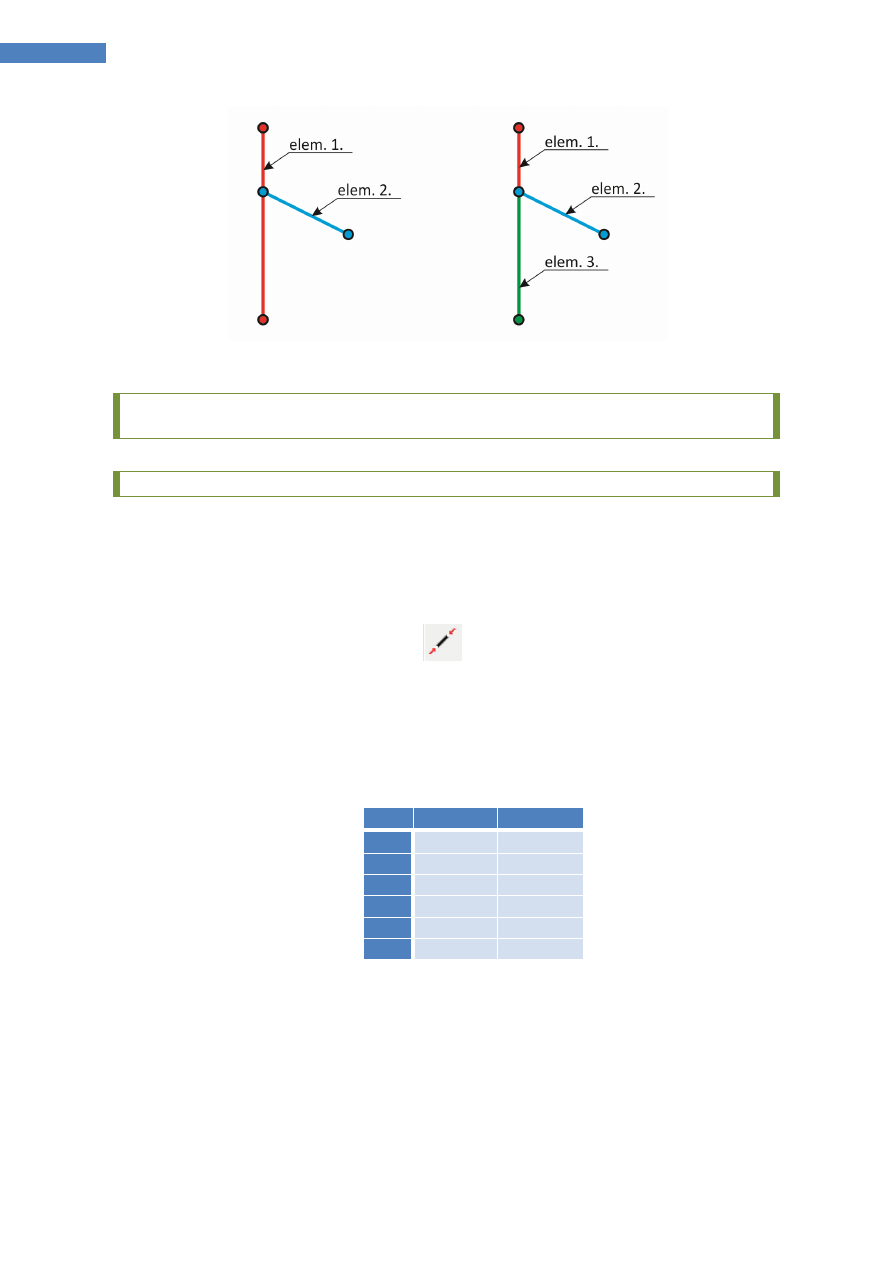
Pręty
Program ROBOT umożliwia łączenie belek w taki sposób, że węzeł jednej z nich leży "na długości"
drugiej (na rysunku po lewej). Program automatycznie dostosuje takie rozwiązanie do prawidłowej
dyskretyzacji MES (rysunek po prawej) i przyjmie, że te części konstrukcji są ze sobą sztywno
połączone. Ze względu na możliwe pomyłki, szczególnie w modelowaniu ram przestrzennych, zaleca
się podział na elementy zgodny z zasadami MES (rysunek po prawej).
6
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
Ze względu na rozbudowane opcje selekcji elementów konstrukcji, tworzenie grup itd. nie ma
konieczności utrzymywania porządku w numeracji prętów i węzłów.
numeracja, numeracja geometryczna, numeracja geometryczna - przykłady, nazwy prętów /
obiektów.
Orientację (obrót) przekroju pręta można modyfikować przy pomocy kąta gamma.
kąt GAMMA
2.3.
Zwolnienia, stężenia
W programie przeguby definiowane są przy pomocy tzw. zwolnień. Definiuje się je z polecenia menu
głównego Geometria->Zwolnienia.
W układach ramowych można modelować stężenia (które głównym zadaniem jest praca na
rozciąganie/ściskanie) na 2 sposoby:
•
Ekran Pręty -> Boczny pasek ikon:
Pręty kratownicowe/ściskanie/rozciąganie. W
wykonywanych projektach nie należy używać opcji pręty pracujące tylko na ściskanie lub
rozciąganie.
Na tak zdefiniowany pręt jest prętem kratowym w sensie MES, przenosi tylko siłę normalną,
nie można do niego przyłożyć obciążeń przęsłowych, więc także ciężaru własnego (który jest
zbierany z połowy długości elementu i przykładany bezpośrednio do węzłów w postaci sił
skupionych).
•
Geometria -> Zwolnienia -> Definicja nowego zwolnienia wg tabeli:
Początek
Koniec
Ux
Uy
Uz
Rx
Ry
Rz
Dzięki tak przyjętym zwolnieniom, element nie będzie przenosił momentów zginających z i na
sąsiednie pręty, przy czym będzie można określić jak duże są momenty zginające od ciężaru
własnego lub innych obciążeń przęsłowych.
2.4.
Przekroje i materiały
Program Robot oferuje dużą bazę przekrojów i materiałów. Trzeba pamiętać o tym, że część
parametrów może być edytowana przez użytkownika (w tym tak istotne jak moduł Younga), więc
należy być pewnym czy są one dobrze zapisane.
Polecenie Narzędzia->Baza profili otwiera okno w którym można znaleźć wszystkie informacje nt.
profili stalowych i innych.
7
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
2.5.
Podpory
Możliwe do zablokowania stopnie swobody są ściśle związane z aktualnym typem konstrukcji. Należy
zwracać szczególną uwagę na nazwy podpór, które nadawane są przez użytkownika.
2.6.
Obciążenia
Obciążenie ciężarem własnym jest dodawane automatycznie tylko w przypadku pierwszego
przypadku obciążenia w trakcie pracy z konstrukcją. W innych przypadkach (np. gdy zawierający je
przypadek obciążeń został usunięty) należy je dodać ręcznie, tak jak inne obciążenia.
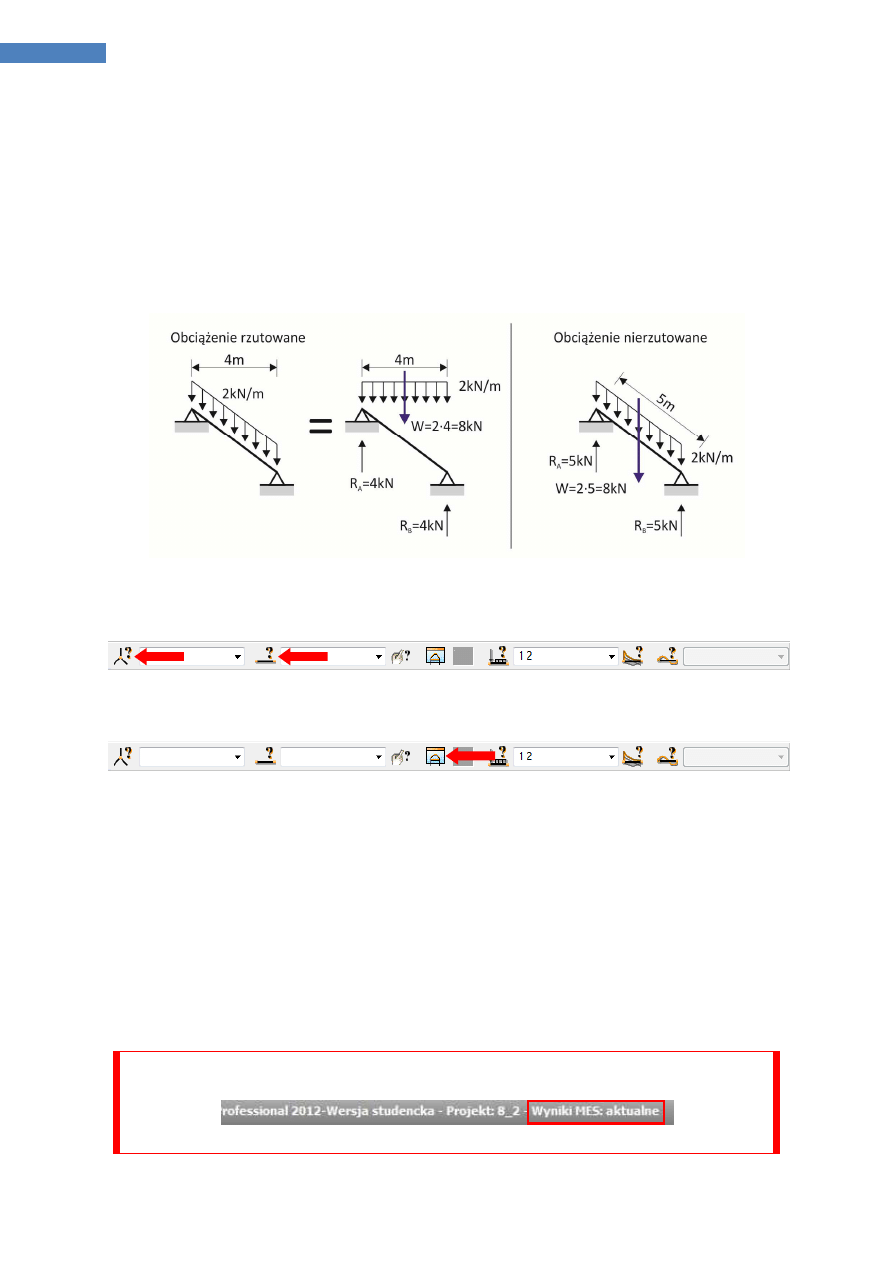
Przy dodawaniu obciążenia ciągłego na pręt można użyć opcji obciążenie rzutowane. Jej znaczenie
wyjaśnia poniższy rysunek.
3.
Selekcja
Narzędzia selekcji umożliwiają wybór elementów wg wielu kryteriów. Okno Selekcja dostępne jest po
kliknięciu w przyciski znajdujące się w pasku selekcji.
W przypadku skomplikowanych konstrukcji ułatwieniem może być edycja części konstrukcji w
oddzielnym oknie. W tym celu zaznaczamy interesujący nas fragment i klikamy przycisk Edycja w
nowym oknie.
Zobacz również hasło pomocy: Listy w programie Robot.
4.
Modyfikacja w tabelach
Dostęp do tabel możliwy jest z menu Widok->Tabele lub z menu kontekstowego edytora graficznego
pod poleceniem Tabele.... Z menu kontekstowego tabeli można wybrać opcje Filtry (jakie węzły,
elementy, przypadki mają być pokazany) oraz Kolumny (jakie wyniki mają być pokazane).
5.
Kombinacje obciążeń
Po wykonaniu obliczeń w modelu ze zdefiniowanymi kombinacjami obciążeń wśród przypadków
obciążeń pojawiają się pozycje <nazwa kombinacji> + oraz <nazwa kombinacji> -. Są to przypadki
obwiedni obciążeń dla danej kombinacji. Pozwalają one na pokazanie ekstremalnych wartości w
tabelach. W przypadku prezentacji graficznej (wykresy) oba te przypadki dają taki sam efekt.
6.
Obliczenia. Rezultaty
Przed rozpoczęciem przeglądania rezultatów należy zawsze upewnić się, że wyniki MES są
aktualne. Odpowiednią informację można znaleźć w tytule okna programu
oraz w dolnym pasku okna
8
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
.
Domyślnie w pliku projektu (*.rtd) zapisywane są wszystkie wyniki analizy MES. Żeby zapisać projekt
bez wyników, a tym samym uzyskać mniejszy rozmiar pliku, należy wybrać polecenie Plik->Zapis
projekt z jako… z typem pliku ROBOT – bez wyników. Należy się przy tym posłużyć nową nazwą pliku,
ponowne użycie starej nazwy pliku nie spowoduje usunięcia z niego wyników analizy.
6.1.
Wykresy - układy lokalne
W elementach prętowych siła normalna ściskająca ma znak dodatni.
W elementach prętowych siły wewnętrzne są pokazywane zawsze w układach lokalnych.
Wynika stąd, że siła Fx jest zawsze siłą normalną, siły Fy i Fz siłami tnącymi, moment Mx
momentem skręcającym, a momenty My i Mz momentami zginającymi.
Przemieszczenia węzłów są zawsze podawane w układzie globalnym.
konwencja znakowania, konwencja znakowania - elementy prętowe
6.2.
Tabele
Wszystkie rezultaty analiz można przeglądać w tabelach. Istotne jest to, że możemy w nich
przeglądać tylko wyniki z węzłów, dlatego też niekiedy warto dodawać węzły np. na wysokości słupa
(związane z dyskretyzacją MES lub bez podziału na dodatkowe elementy).
W większości tabel możemy szybko odnaleźć wielkości ekstremalne przełączając między kartami
zlokalizowanymi na dole okien tabel.
wyniki w tabelach
6.3.
Analiza szczegółowa
Analiza szczegółowa umożliwia odnalezienie sił wewnętrznych w dowolnym punkcie wyróżnionego
pręta lub w zadanych punktach podziału.
analiza szczegółowa, analiza szczegółowa - parametry prezentacji
7.
Edycja konstrukcji
Narzędzia edycji konstrukcji zgrupowane są w pasku Edycja dostępnym po kliknięciu przycisku na
pasku narzędzi głównych.
Wśród narzędzi edycji można znaleźć narzędzie Podział. Przy jego użyciu zaleca się, żeby pozostawić
nieaktywną opcję Generuj węzły bez dzielenia prętów/krawędzi. Dzięki temu zachowane są zasady
MES – elementy belkowe zaczynają i kończą się w węzłach, nie występują węzły wewnętrzne.
8.
Offsety
Offsetów można używać tylko w przypadku ram przestrzennych. Ich działanie odpowiada
przesunięciu osi elementu względem węzłów lub mimośrodowemu połączeniu prętów.
offsety
9.
Obciążenie powierzchniowe, okładziny
W układach trójwymiarowych możliwe jest przykładania obciążeń powierzchniowych. W przypadku
ram zamieniane jest ono na obciążenia ciągłe sąsiadujących prętów, dla kratownic zamieniane jest
ono na siły skupione w węzłach. Okładzina może działać jedno- lub dwukierunkowo, co wpływa na
wybór obciążanych prętów.
Okładzina nie jest dzielona na ES, nie są obliczane dla niej siły ani przemieszczenia. Jest ona
narzędziem służącym do rozkładu obciążeń. Rozkład ten wykonywany jest tzw. metodą kopertową.
9
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
okładzina, metoda kopertowa
10.
Obciążenie ruchome - pojazd dowolny, maksymalne naciski na osie
Obciążenie ruchome pojazdami może być zrealizowane dowolnym samochodem. Wymagane jest
zadanie obciążenia maksymalnego (ciężar własny + ładowność) z rzeczywistym rozkładem na osie.
Takie informacje można znaleźć w Danych technicznych i homologacyjnych pojazdów, można je
odszukać w Internecie dla konkretnych modeli samochodów.
obciążenie ruchome, ograniczenia na położenie pojazdu, parametry drogi
10.1.
Linie wpływu
W programie Robot można uzyskiwać linie wpływu pochodzące od dowolnego ustawienia sił
(pojazdu). Dostęp do narzędzia tworzenia linii wpływu odbywa się przez polecenie menu Rezultaty-
>Zaawansowane->Linia wpływu….
Linie wpływu
10.2.
Obwiednie
Tak jak w przypadku kombinacji, tak i w obciążeniu ruchomym obwiednia sił wewnętrznych jest
automatycznie tworzona w przypadkach obciążeń z dodatkowymi znakami + i -.
11.
Analiza modalna
Podstawy teoretyczne analizy modalnej przedstawione są na przedmiocie Dynamika Budowli.
Rozwiązaniem problemu analizy modalnej są pary częstość drgań własnych i postać drgań własnych.
Pełne wyniki analizy modalnej dostępne są w formie tabelarycznej z menu głównego Rezultaty-
>Zaawansowane->Drgania własne.
Jako typ macierzy mas należy przyjmować macierz rozłożoną.
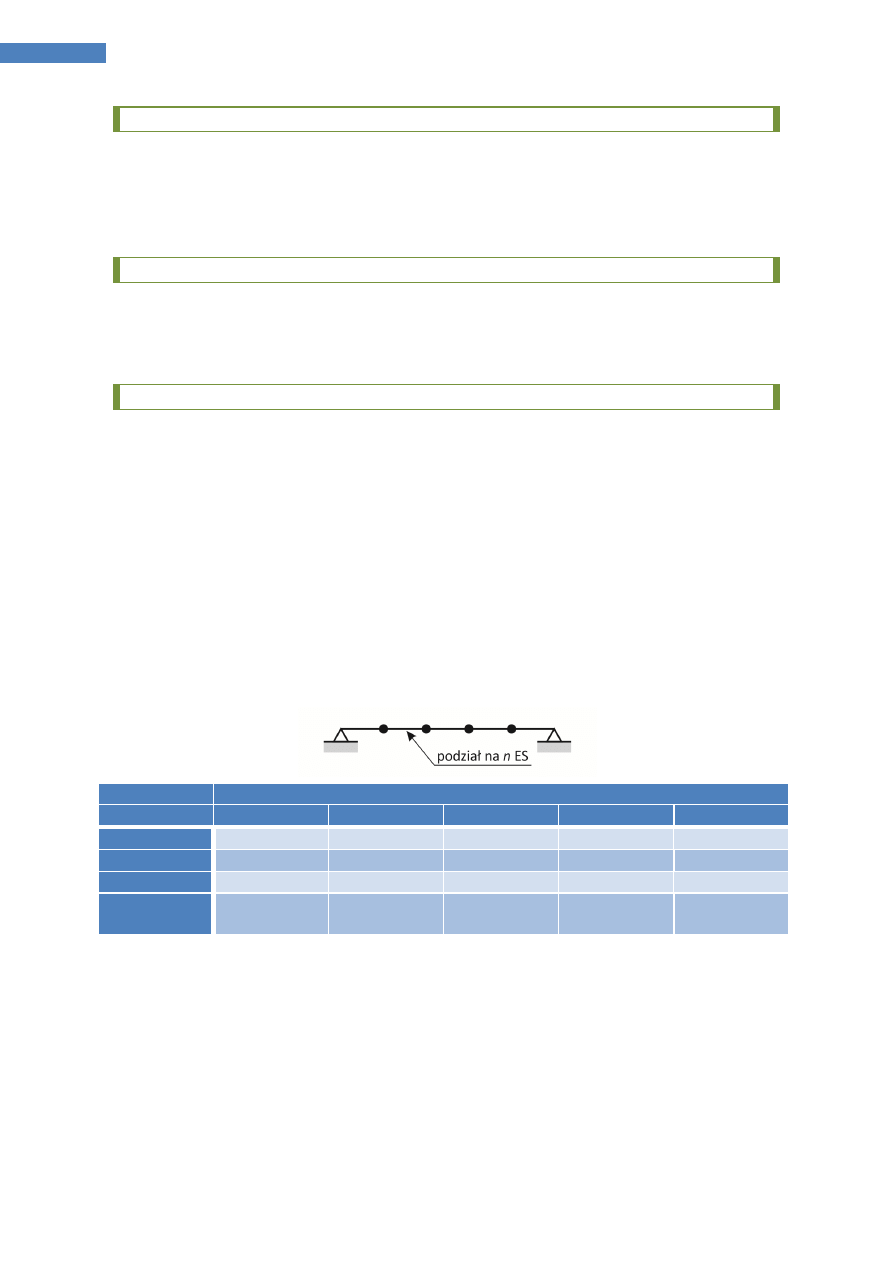
Przy wykonywaniu analizy modalnej wpływ na dokładność obliczeń ma podział na ES. W poniższej
tabeli pokazano wartości częstotliwości drgań własnych dla kolejnych postaci dla różnej dyskretyzacji
belki:
Postać drgań
Postać drgań
1
2
3
4
5
n=2
7,7
34,1
85,3
154,4
187,7
n=6
7,7
30,8
69,1
123,0
172,2
n=10
7,7
30,8
68,9
121,7
171,0
wartość
analityczna
7,7
30,9
69,5
123,5
193,0
Dokładność obliczonych częstotliwości ma wpływ na dokładność obliczeń analizy czasowej.
W programie używa się nazwy pulsacja, które to pojęcie jest tożsame z częstością drgań własnych i
oznaczana zwykle jako
ω
.
12.
Analiza czasowa - całkowanie równań ruchu (CRR)
Przed wykonaniem CRR należy zawsze wykonać analizę modalną.
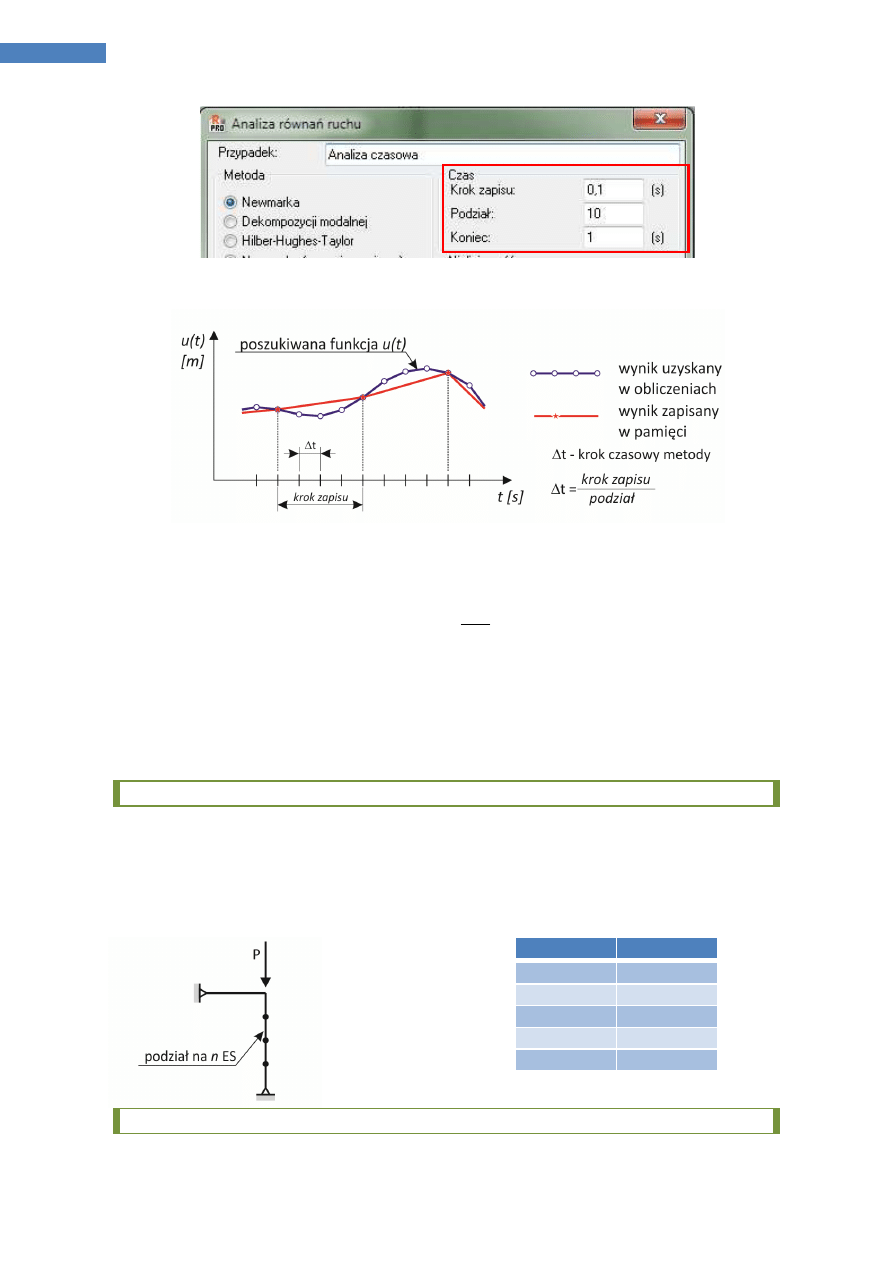
12.1.
Parametry
Parametry dotyczące czasu w CRR:
10
Komputerowa Analiza Konstrukcji - materiały pomocnicze dla studentów
Stanisław Burzyński, KMBiM WILIŚ PG, 2012
Zależności między krokiem zapisu, podziałem a krokiem czasowym danej metody CRR wyjaśnia
wykres:
Koniec oznacza końcową wartość zmiennej czasowej dla której przeprowadzana jest analiza (czas jej
trwania).
Krok czasowy w metodzie Newmarka należy przyjmować wg wzoru
min
10
T
t
∆ =
,
w którym
min
T
oznacza najmniejszy okres drgań własnych konstrukcji który chcemy uwzględnić. W
praktyce odpowiada on np. 5. postaci drgań własnych.
12.2.
Wyświetlanie wyników
Wyniki analizy czasowej można przeglądać na wykresach wyróżnionych wielkości fizycznych w funkcji
czasu lub dla całej konstrukcji w danej chwili (składowa przypadku).
definicja wykresów analizy czasowej, całkowanie równań ruchu - wykresy, składowa przypadku
13.
Stateczność układów ramowych
Problem stateczności układów ramowych związany jest z wyboczeniem konstrukcji. Rozwiązaniem
tego problemu są pary współczynnik obciążenia krytycznego i postać wyboczenia.
Podobnie jak w przypadku analizy modalnej, tak w przypadku sprawdzania stateczności początkowej
układu ważna jest dyskretyzacja na ES.
n
Pkr [N]
1
1934
2
1402
3
1389
4
1386
5
1385
parametry analizy wyboczeniowej
Wyszukiwarka
Podobne podstrony:
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenie nr 3 materialy pomocn Nieznany
cwiczenie nr 2 materialy pomocn Nieznany
449 SKiTI LAB Materialy Pomocni Nieznany (4)
449 SKiTI LAB Materialy Pomocni Nieznany (2)
2012 Socjologia materiały pomocnicze
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenie nr 3 materialy pomocn Nieznany
2012 Socjologia materiały pomocnicze
Materialy pomocnicze cardan AG Nieznany
Materialy pomocnicze 4 id 28534 Nieznany
2012 Kuferek Nauczyciela materialy pomocnicze Igrzyska Olimpijskie
cykl Nieznany świat materiały pomocnicze
materialy pomocnicze14 Rachunek Nieznany
Materialy pomocn id 286338 Nieznany
Wykład 2 Materiały pomocnicze (2012)
Materialy Pomocnicze (1) id 285 Nieznany
materialy pomocnicze13 Rachunek Nieznany
więcej podobnych podstron