Z
ACHODNIOPOMORSKI
U
NIWERSYTET
T
ECHNOLOGICZNY
Przedmiot:
Metody Optymalizacji
Temat:
M
ETODA FUNKCJI KARY
Wykonawca:
Krzywaźnia Gniewosz
Studia N1
Prowadzący:
dr P. Orłowski
Data wykonania:
2011-11-04
Ocena:
Podpis:
I.
Cel ćwiczenia
- dokonanie implementacji praktycznej w środowisku Matlab lub Scilab metody poszu-
kiwań ekstremum funkcji z ograniczeniami dla funkcji wielu zmiennych przy pomocy
zewnętrznej funkcji kary oraz analiza podstawowych własności.
II.
Program ćwiczenia
1. Proszę zaimplementować algorytm poszukiwania minimum funkcji wielu zmiennych
metodą zewnętrznej funkcji kary.
2. Proszę wyznaczyć minimum funkcji z ograniczeniami dla następujących przypadków
(cyfra określa funkcję, litery – ograniczenia) dla następujących przypadków:
1A, 1B, 4CD, 2EF, 3G, 4H, 2I, 2HI, 3DFJ
3. W każdym przypadku proszę podać wynik x, f(x), j, ε, x
pocz
oraz przedstawić
rozwiązanie graficznie z zaznaczonymi ograniczeniami (wykres 3D lub konturowy 2D)
łącznie z wykresem funkcji f(x).
4. Proszę narysować wykresy funkcji P
x,K
j
dla 2 wybranych wartości j dla dowolnie
wybranego przypadku z punktu 2.
Wskazówka:
Postać funkcji kary:
III.
Opracowanie programu ćwiczeń
1. Algorytm poszukiwania minimum funkcji wielu zmiennych metodą zewnętrz-
nej funkcji kary.
-funkcja naszafk
function
P=naszafk(x)
global
iteracja
%1
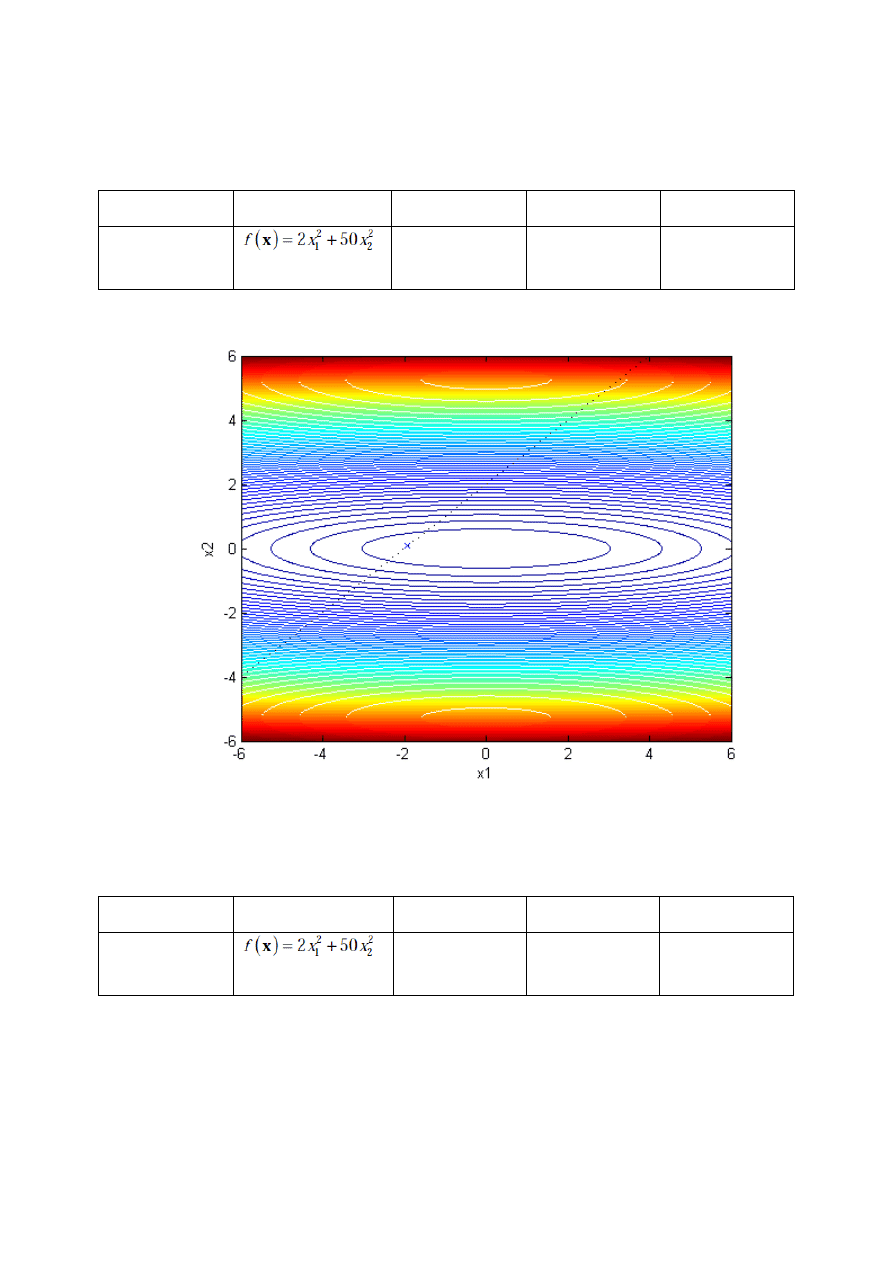
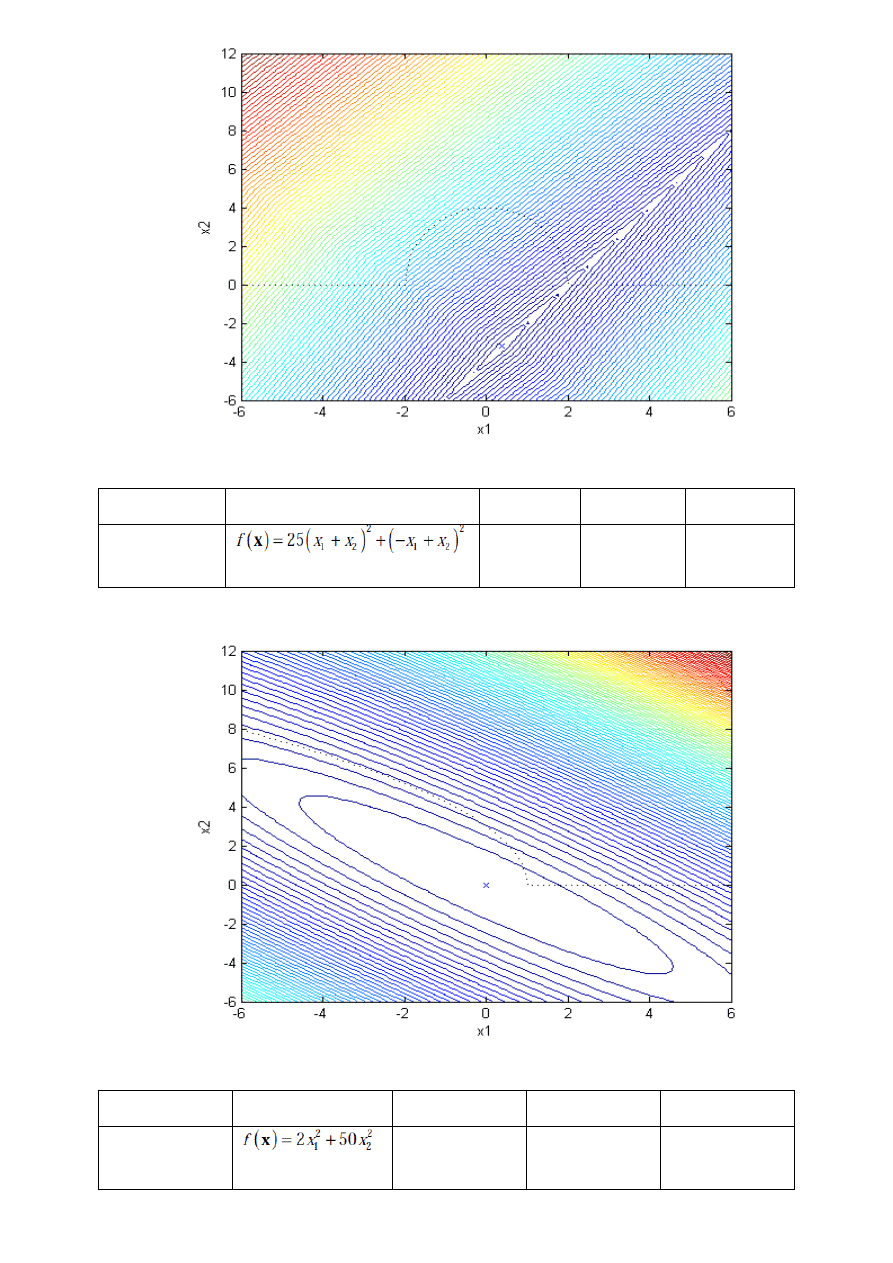
fx=2*x(1)^2+50*x(2)^2;
%2 fx=25*(x(1)+x(2))^2+(-x(1)+x(2))^2
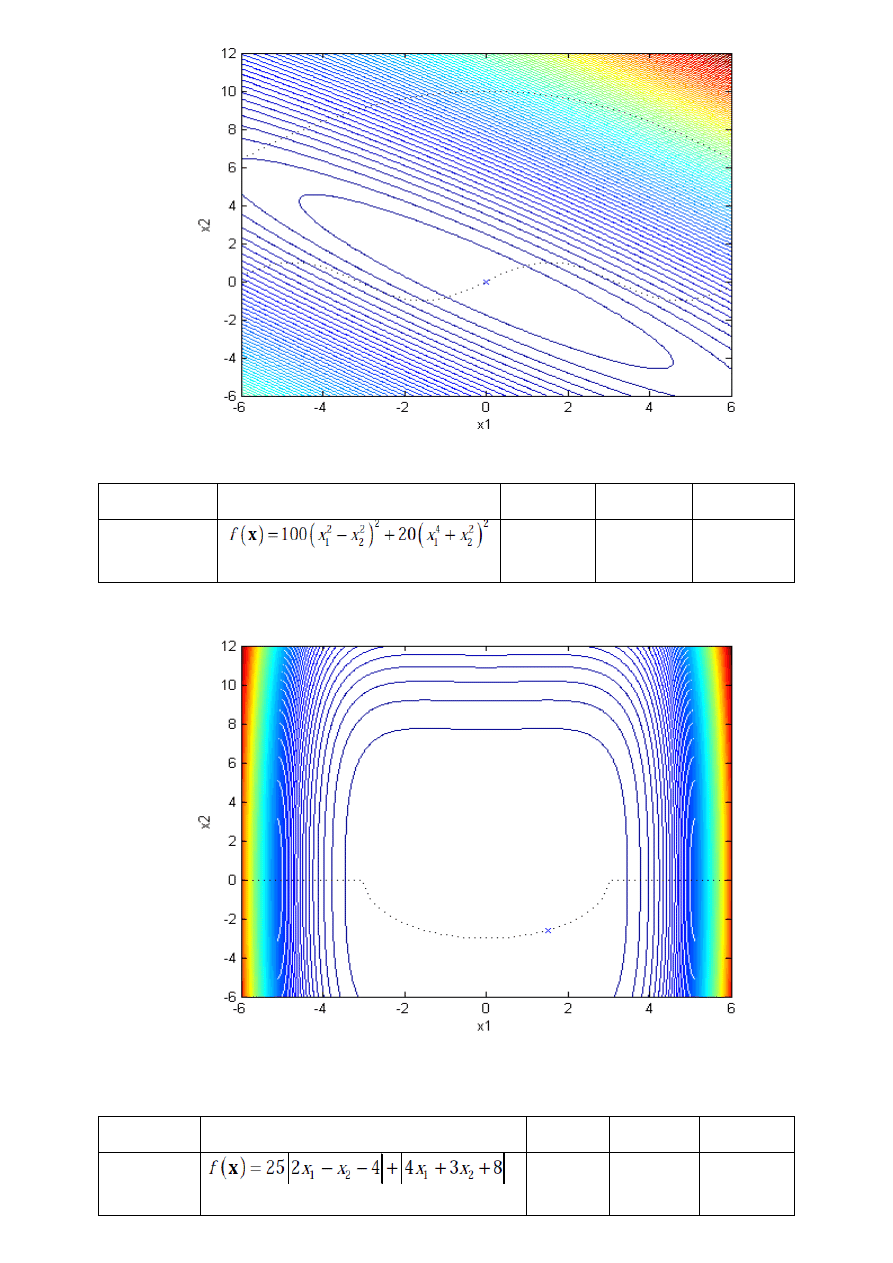
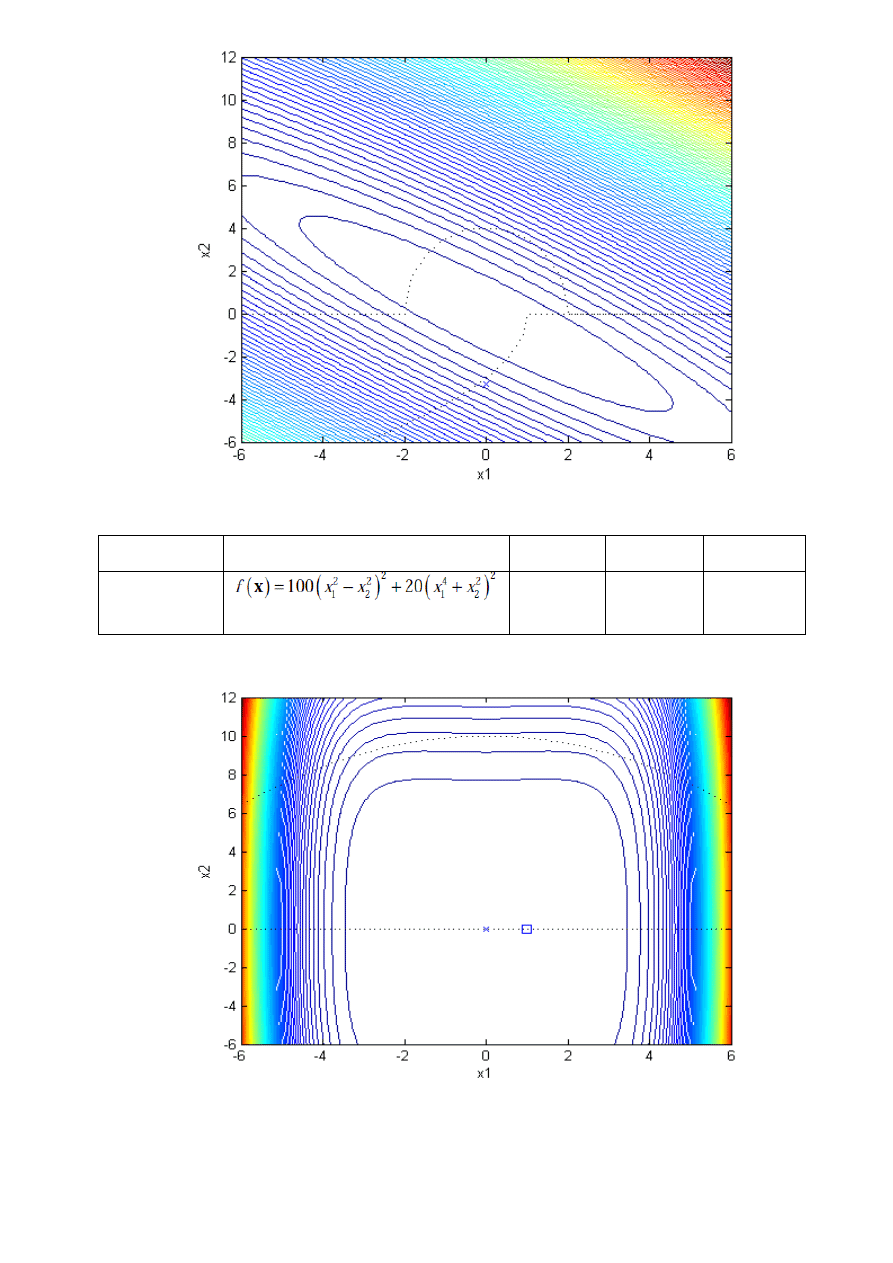
%3 fx=100*(x(1)^2-x(2)^2)^2+20*(x(1)^4+x(2)^2)^2;
%4 fx=25*abs(2*x(1)-x(2)-4)+abs(4*x(1)+3*x(2)+8);
%A
gxa=-(x(1)-x(2)+2);
%B gxb=x(1)-x(2)+2;
%C gxc=x(2)+0.5*x(1)^2-10;
%D gxd=-x(2);
%E gxe=-(x(2)-sin(x(1)));
%F gxf=-0.1*x(1)^2+10-x(2);
%G gxg=x(1)^2+x(2)^2-9;
%H gxh=0.25*x(1)^2+0.0625*x(2)^2-1;
%I gxi=-(x(1)^2+((x(2)^2)/9)-1);
%J gxj=-(x(1)-1);
Kara=2^iteracja*(max(0,-gxa)^2)
%+max(0,-gxf)^2+max(0,-gxj)^2);
P=fx+Kara;
end
-funkcja f
function
k=f(x,y)
%1
k=2*x^2+50*y^2;
%2 k=25*(x+y)^2+(-x+y)^2;
%3 k=100*(x^2-y^2)^2+20*(x^4+y^2)^2;
%4 k=25
-program główny
clc,clear
global
iteracja
iteracja=0;
x=[5,5];
dokl=1e-10;
blad=Inf;
while
blad>dokl
xpocz=x;
[x,Pj]=fminsearch(@naszafk,x);
blad=norm(x-xpocz);
iteracja=iteracja+1;
end

Pj
x
x1=linspace(-6,6,100);
x2=linspace(-6,12,100);
[X,Y]=meshgrid(x1,x2);
w=size(X);
for
i=1:w
for
j=1:w
Z(i,j)=f(X(i,j),Y(i,j));
end
end
z=f(x(1),x(2));
figure(1)
contour(X,Y,Z,100);
hold
on
% A
x2y=x1+2;
% B x2y=x1+2;
%C x2y=-0.5*x1.^2+10;
%D x2y=0;
%E x2y=sin(x1);
%F x2y2=-0.1*x1.^2+10;
%G x2y=-sqrt(-x1.^2+9);
%H x2y=sqrt((1-0.25*x1.^2)/0.0625);
%I x2y2=-sqrt(9*(1-x1));
%J gxj=-(x(1)-1)
plot(x1,x2y,
'k:'
);
hold
on
%plot(x1,x2y2,'k:');
% hold on
% plot(1,0,'s')
% hold on
plot(x(1),x(2),
'x'
);
xlabel(
'x1'
)
ylabel(
'x2'
)
-program do zrealizowania punktu czwartego
h=100;
step=5;
x1=-h:step:h;
x2=x1;
d=length(x1);
iteracja=4;
for
i=1:d
for
j=1:d
f1(i,j)=2*x1(i)^2+50*x2(j)^2;
gxa(i,j)=x1(i)+x2(i)+2;
Kara(i,j)=2^iteracja*(max(0,-gxa(i,j))^2);
end
end
figure(1)
surf(x1,x2,f1)
hold
on
surf(x1,x2,Kara)
figure(2)
contour(x1,x2,f1,50)
hold
on
contour(x1,x2,Kara,50)
2. Wyznaczanie minimum funkcji z ograniczeniami dla następujących przypadków
- 1A
x
f (x)
j
ε
x
pocz
x
1
=-1.9231
x
2
= 0.0769
20
1e-10
x
1
=5
x
2
=5
- 1B
x
f (x)
j
ε
x
pocz
x
1
=-0.3548e-4
x
2
= 0.0274e-4
2
1e-10
x
1
=5
x
2
=5
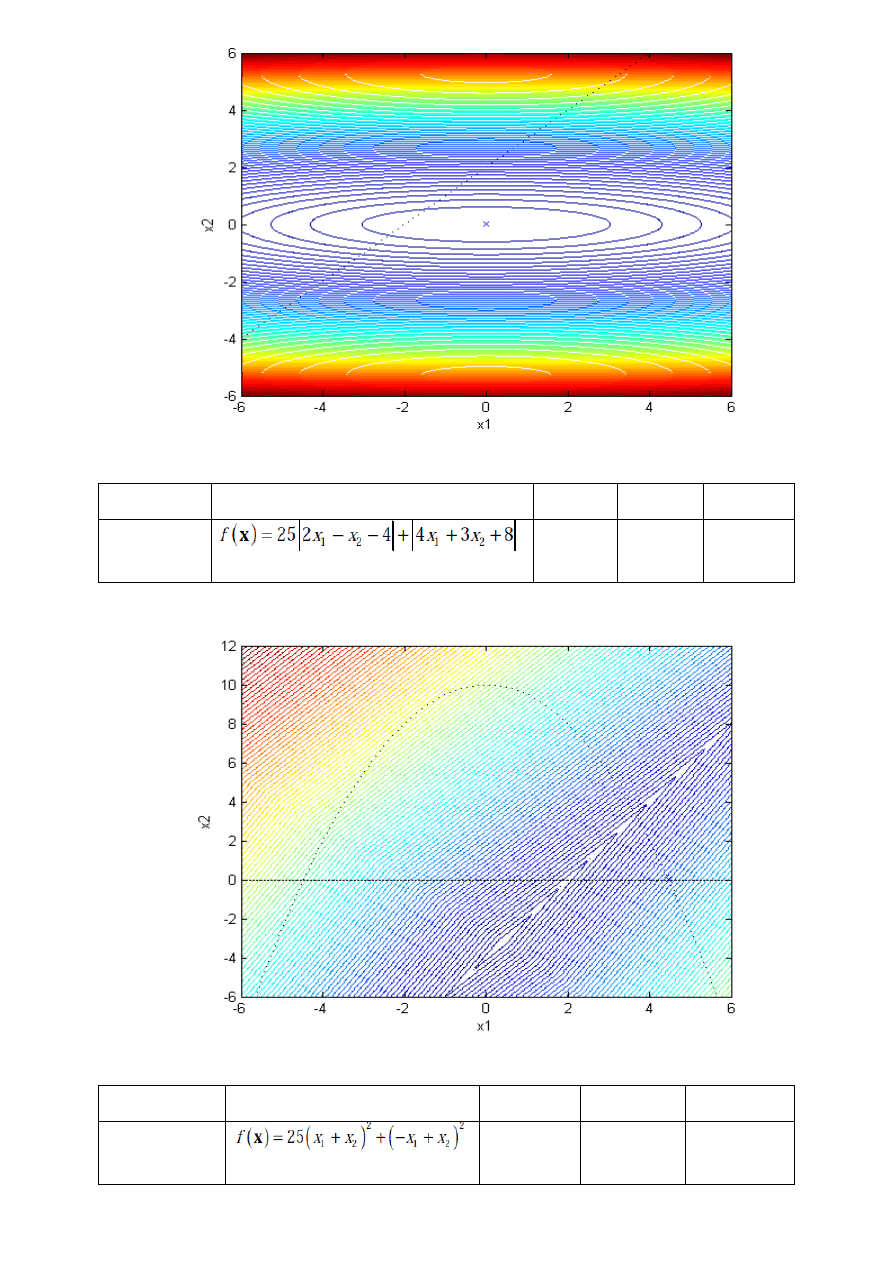
- 4CD
x
f (x)
j
ε
x
pocz
x
1
=4.4721
x
2
=0.0001
20
1e-5
x
1
=5
x
2
=5
- 2EF
x
f (x)
j
ε
x
pocz
x
1
=0.3804e-5
x
2
=-0.3687e-5
2
1e-10
x
1
=5
x
2
=5
- 3G
x
f (x)
j
ε
x
pocz
x
1
=1.5213
x
2
=-2.5856
31
1e-10
x
1
=5
x
2
=5
- 4H
x
f (x)
j
ε
x
pocz
x
1
=0.4
x
2
=-3.2
3
1e-10
x
1
=5
x
2
=5
- 2I
x
f (x)
j
ε
x
pocz
x
1
=0.2576e-4
x
2
=-0.2839e-4
7
1e-10
x
1
=5
x
2
=5
- 2HI
x
f (x)
j
ε
x
pocz
x
1
=0
x
2
=-3.2684
30
1e-10
x
1
=5
x
2
=5
- 3DFJ
x
f (x)
j
ε
x
pocz
x
1
=-0.2548e-4
x
2
=-0.2311e-4
11
1e-10
x
1
=5
x
2
=5
3. Wykresy funkcji P
x,K
j
dla 2 wybranych wartości j dla dowolnie wybranego
przypadku z punktu 2.
Funkcje kary dla pierwszego przypadku (1A)
- dla j=2
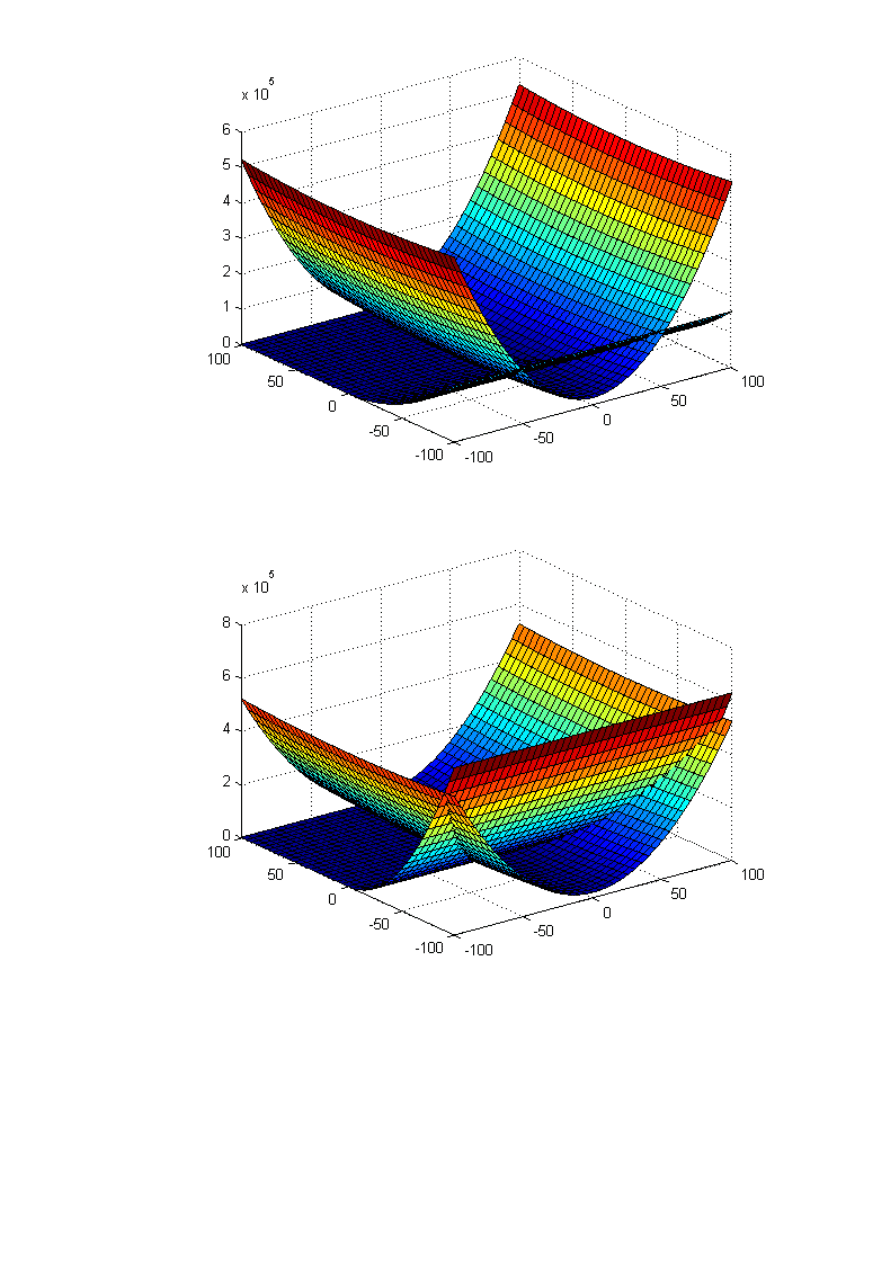
- dla j=4
Wyszukiwarka
Podobne podstrony:
funkcja kary
Funkcje wykonywania kary pozbawienia wolności (pdf) 9 01
BANK CENTRALNY I JEGO FUNKCJE
Zaburzenia funkcji zwieraczy
Genetyka regulacja funkcji genow
BYT 2005 Pomiar funkcjonalnosci oprogramowania
Diagnoza Funkcjonalna
Insulinoterapia funkcjonalna
Postać kanoniczna funkcji kwadratowej
Wpływ choroby na funkcjonowanie rodziny
LAB PROCEDURY I FUNKCJE
STRUKTURA I FUNKCJONOWANIE GN
układ pokarmowy budowa i funkcja
więcej podobnych podstron