1
Kinematyka punktu
– opis ruchu punktu, układu punktów, bryły sztywnej lub układów brył sztywnych,
bez wnikania w przyczyny ruchu.
Wielkościami charakteryzującymi ruch są: przemieszczenie, prędkość, przyspieszenie.
W celu opisania ruchu posługujemy się układami odniesienia względem których badamy ruch.
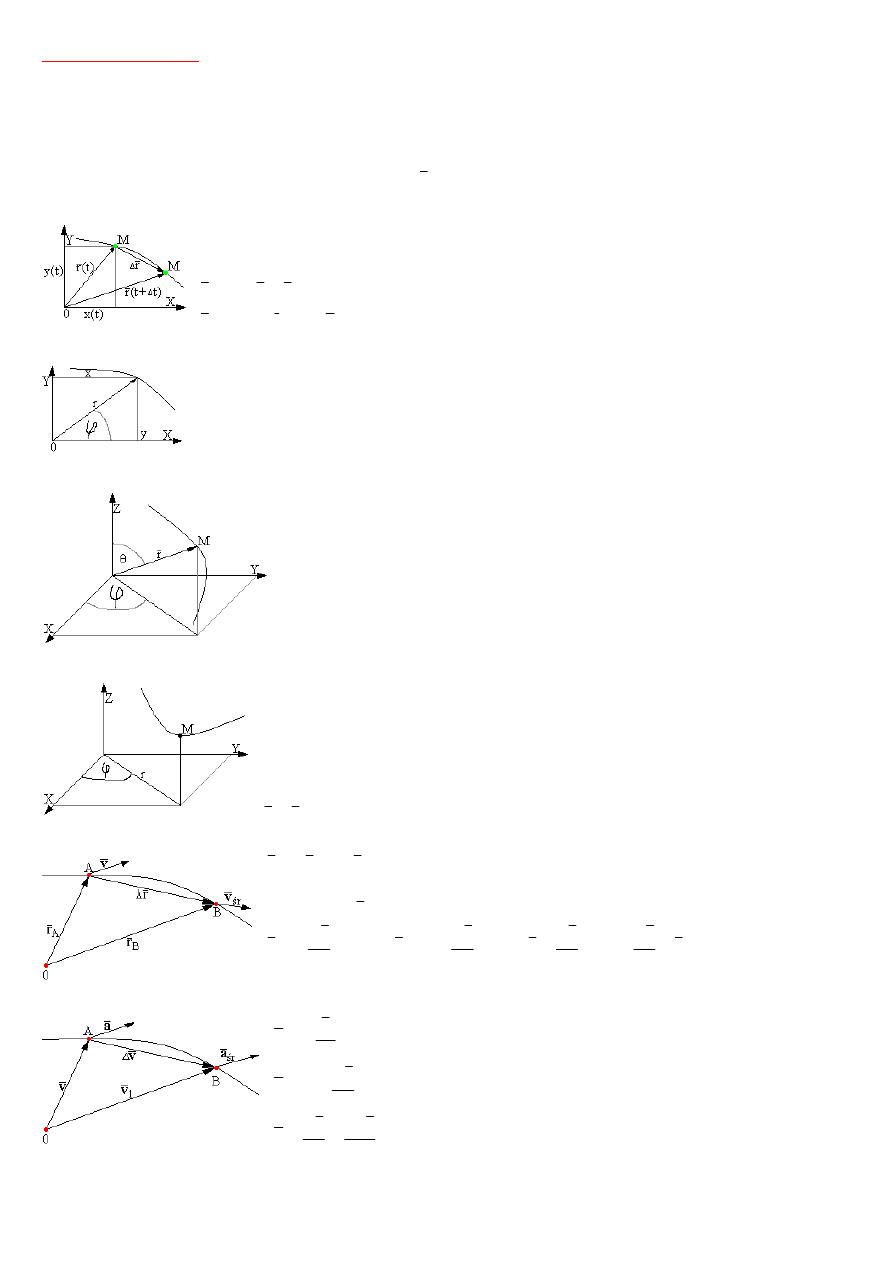
Kartezjański płaski układ odniesienia w którym ruch punktu opisujemy względem osi X i Y względem
punktu O.
Jednoznaczny opis ruchu w postaci wektorowej
)
(t
r
po przez określenie przyrostu wektora.
Kartezjański płaski układ współrzędnych.
j
t
y
i
t
x
t
r
t
t
r
r
t
r
)
(
)
(
)
(
)
(
)
(
Układ biegunowy.
)
(
)
(
t
t
r
r
sin
cos
r
y
r
x
Kartezjański przestrzenny układ współrzędnych.
)
(
)
(
)
(
t
t
t
r
r
Układ walcowy.
r’=r(t)
)
(t
z=z(t)
wektorowe równanie ruchu – jednoznacznie określa położenie.
)
(t
r
r
Prędkość punktu
r
r
r
A
B
Wyznaczanie wektora prędkości punktu. Prędkość średnia jest stosunkiem
przyrostu
r
do przyrostu Δt.
t
r
v
śr
t
r
v
t
0
lim
dt
r
d
v
r
dt
r
d
Przyspieszenie punktu.
Przyspieszeniem średnim nazywamy stosunek przyrostu prędkości Δv do przyrostu czasu Δt.
t
v
a
śr
t
v
a
t
0
lim
2
2
dt
r
d
dt
v
d
a
2
Miejsce geometryczne końców wektorów prędkości, których początki sprowadzono do jednego punktu
nazywamy hodografem prędkości.
Klasyfikacja ruchu:
Wielkości charakterystyczne: tor, prędkość, przyspieszenie.
a) tor – ruch prostoliniowy i krzywoliniowy,
b) prędkość – ruch jednostajny i zmienny,
c) przyspieszenie – ruch jednostajnie przyspieszony i zmienny.
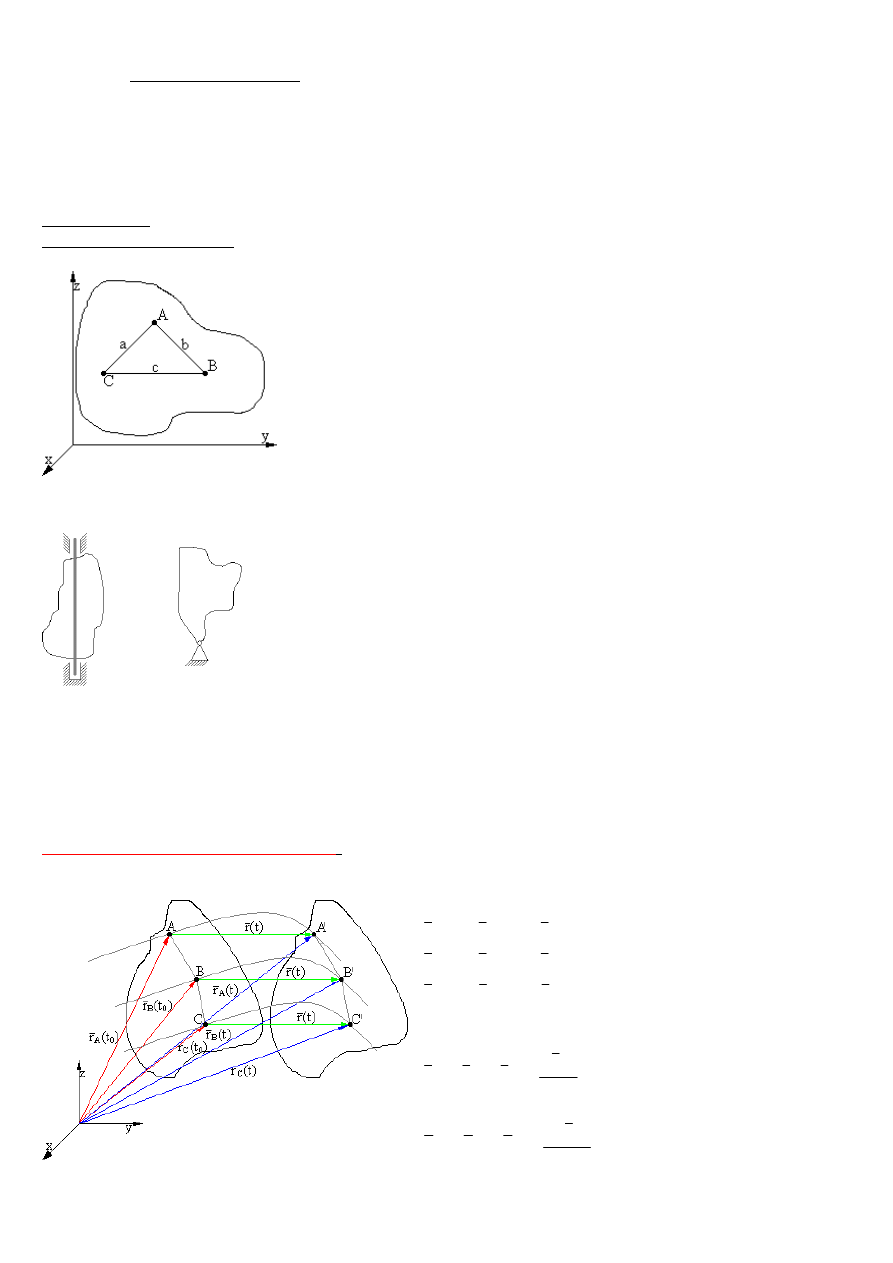
Kinematyka bryły sztywnej:
Bryłą sztywna – nazywamy zbiór punktów, których wzajemne odległości są stałe.
Liczbą stopni swobody – nazywamy liczbę niezależny współrzędnych potrzebnych do określenia
położenia punktów lub ryły w przestrzeni.
Położenie bryły w przestrzeni określone przez trzy punkty.
A(x
A
, x
A
, x
A
)
B(x
B
, x
B
, x
B
)
C(x
C
, x
C
, x
C
)
Równania maja postać:
2
2
2
2
2
2
2
2
2
2
2
2
c
z
z
y
y
x
x
b
z
z
y
y
x
x
a
z
z
y
y
x
x
B
C
B
C
B
C
A
B
A
B
A
B
C
A
C
A
C
A
Sześć współrzędnych wystarcza do określenia jednoznacznie dowolnego
ruchu swobodnego. Dowolna bryła ma sześć stopni swobody lub mniej. Przykłady:
Jeden stopień swobody.
Trzy stopnie swobody.
Klasyfikacja ruchu brył:
1) Ruch postępowy ( ruch jednoparametrowy ).
2) Ruch obrotowy.
3) Ruch płaski.
4) Ruch złożony ( względny ).
5) Ruch kulisty.
6) Ruch ogólny.
Ruchem postępowym bryły sztywnej
nazywamy taki ruch w którym wszystkie punkty bryły doznają
tych samych przesunięć. Jest to najprostszy przypadek ruchu bryły sztywnej zwany jednoparametrowym
( wystarczy podać tylko jedną wielkość określającą ruch aby jednoznacznie opisać ruch bryły ).
Równania ruchu poszczególnych punktów:
t
r
t
r
t
r
t
r
t
r
t
r
t
r
t
r
t
r
C
C
B
B
A
A
)
(
)
(
)
(
0
0
0
Prędkość punktów w ruchu postępowym, wektor
prędkości:
dt
t
r
d
v
v
v
C
B
A
Wektor przyspieszenia:
2
2
dt
t
r
d
a
a
a
C
B
A
3
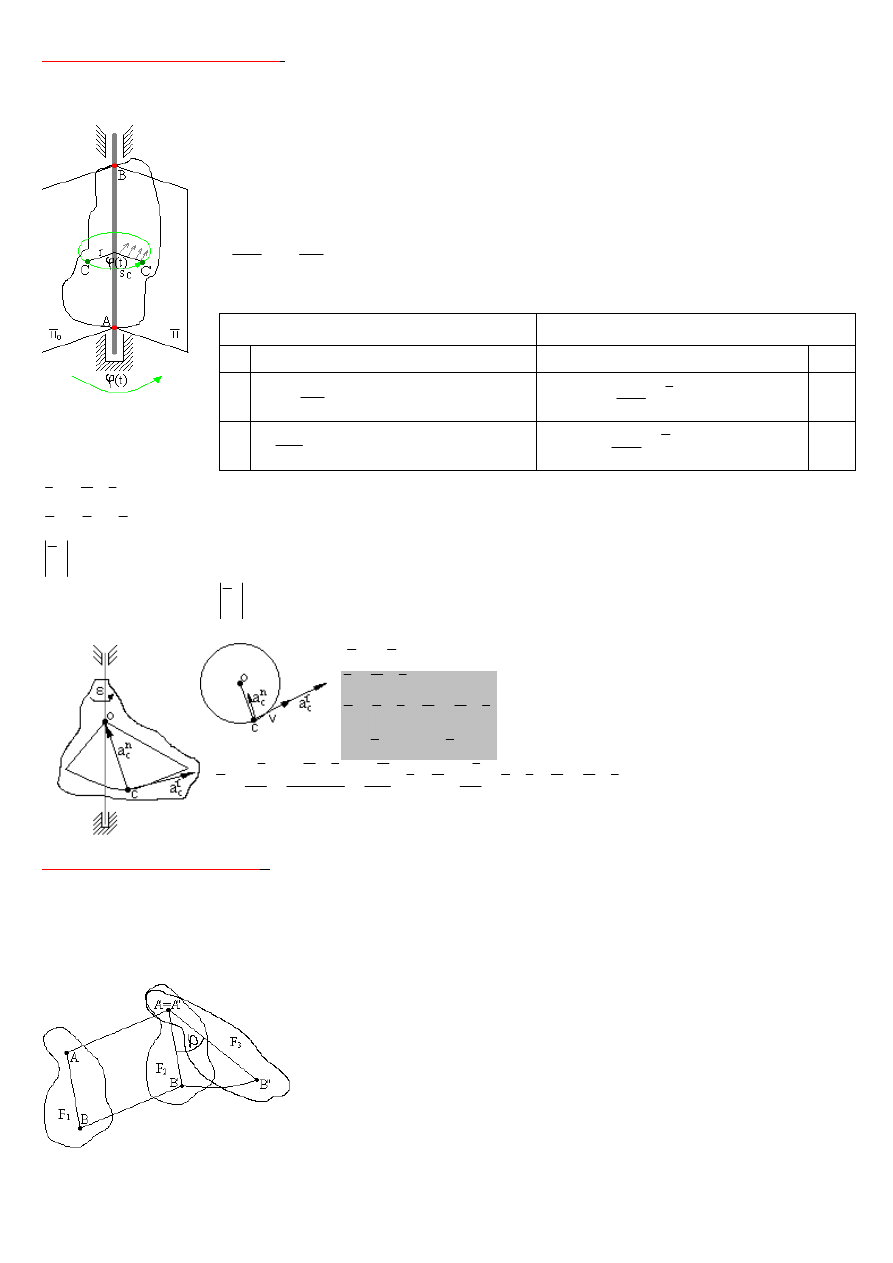
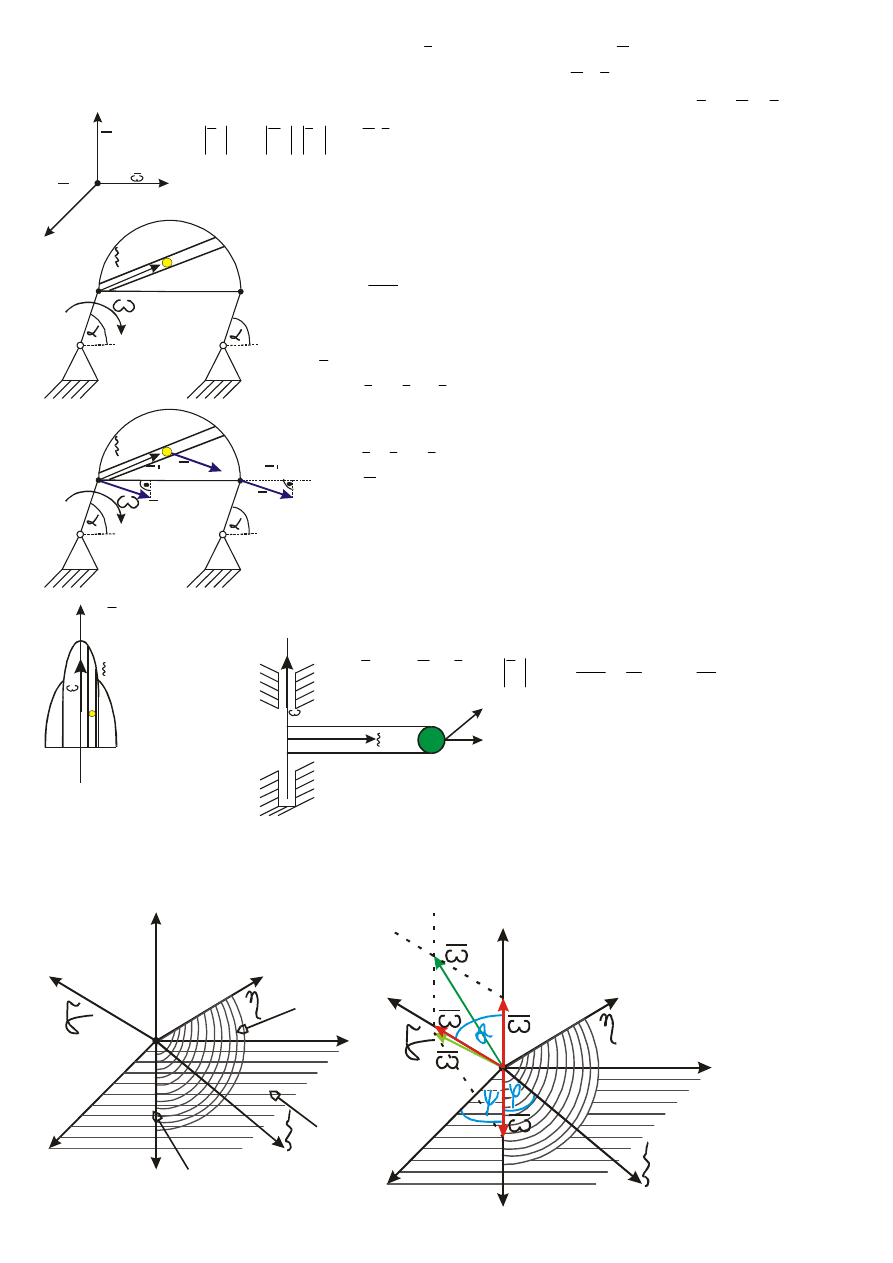
Ruch obrotowy bryły sztywnej
. Jeżeli unieruchomimy dwa dowolne punkty bryły sztywnej, to wszystkie
punkty leżące na prostej łączącej dwa unieruchomione punkty ( będące nieruchome, stanowiące oś
obrotu ) będą mogły poruszać się po okręgach w płaszczyznach prostopadłych do osi obrotu o środkach
na niej leżących.
Tor każdego ciała poruszającego się ruchem obrotowym jest okręgiem leżącym w
płaszczyźnie prostopadłej do osi obrotu o środku leżącym na tej osi i opisany jest
promieniem o długości równej odległości punktu od osi obrotu.
s
C
=φ(t)·r
Prędkość liniowa punktu:
r
t
r
t
dt
d
r
dt
ds
v
C
Prędkość kątowa ω.
s
c
=φ(t)·r
c
c
r
v
c
n
c
c
a
a
a
r
a
n
c
2
Kierunek przyspieszenia normalnego równoległy do promienia CO, zwrot od C do O.
Przyspieszenie styczne:
r
a
c
Kierunek przyspieszenia stycznego prostopadły do promienia, zwrot
zgodny ze zwrotem ε.
c
n
c
a
a
n
r
r
a
r
v
a
a
r
r
dt
r
d
r
dt
d
dt
r
d
dt
v
d
a
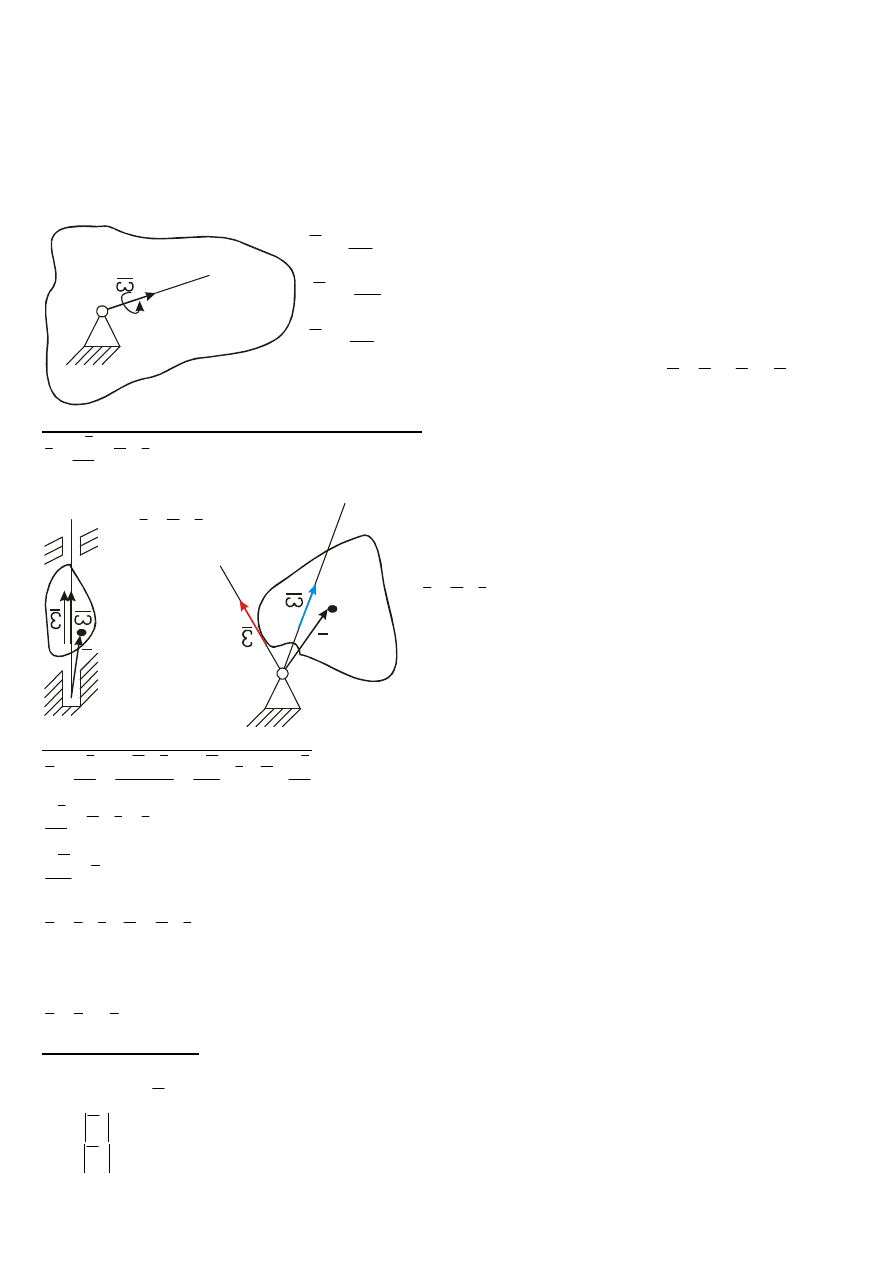
Ruch płaski bryły sztywne
j. Ruchem płaskim ciała sztywnego nazywamy ruch w którym wszystkie
punkty ciała poruszają się w płaszczyznach równoległych do płaszczyzny zwanej płaszczyzną kierującą.
Ruch płaski bryły sztywnej można przedstawić:
a) jako przemieszczenie i obrót,
b) jako obrót wokół szczególnego punktu.
Ruch płaski jako złożenie przemieszczenia i obrotu:
Równania:
x
A
=x
A
(t) x
B
=x
B
(t)
y
A
=y
A
(t) y
B
=y
B
(t)
Rych obrotowy:
t
WIELKOŚCI KĄTOWE W RUCHU OBROTOWYM
( określają ruch całej bryły )
WIELKOŚCI LINIOWE W RUCHU OBROTOWYM
( dotyczą tylko określonego punktu )
t
- droga [rad]
t
s
s
C
C
[m]
s
dt
d
- prędkość [rad/s]
c
C
v
dt
ds
[m/s]
s
dt
d
- przyspieszenie [rad/s
2
]
C
C
a
dt
dv
[m/s
2
]
s

4
Obrót wokół chwilowego środka obrotu:
Twierdzenie Oilera – dowolne przemieszczenie figury płaskiej w jej płaszczyźnie, może być dokonane za
pomocą pewnego punktu zwanego środkiem obrotu. Wokół każdego środka, obrót trwa nieskończenie
krótko, dlatego też punkty te nazywamy chwilowymi środkami obrotu.
a, b – symetralne odcinków
C – środek obrotu – wraz z ruchem ciała przemieszcza się
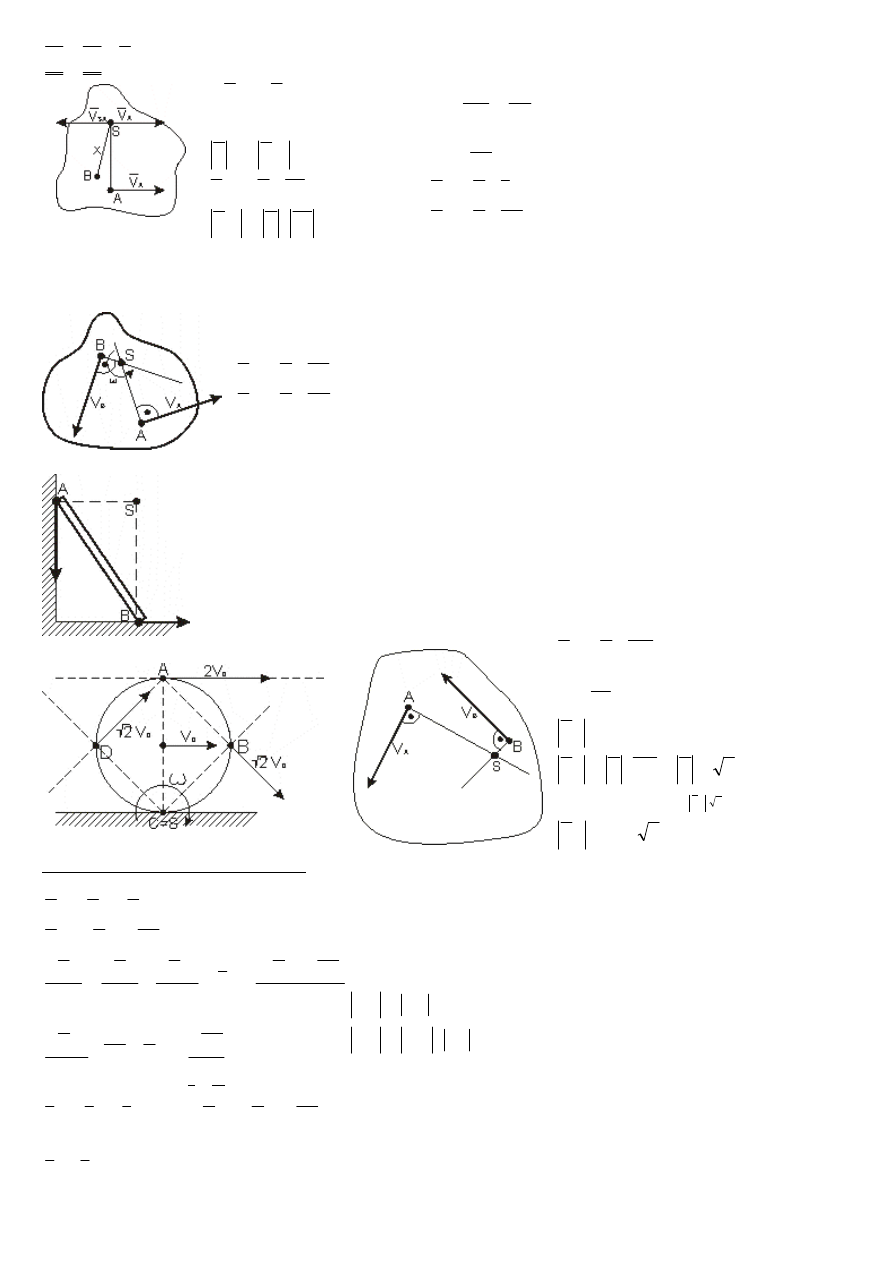
Metody wyznaczania prędkości w ruchu płaskim:
1. Metoda analityczna.
2. Metoda rzutów prędkości.
3. Metoda superpozycji.
4. Metoda chwilowego środka obrotu.
5. Metoda prostej przechodniej.
6. Metoda prędkości odwróconych.
Ad1.
Metoda analityczna
– polega na zróżniczkowaniu względem czasu równań ruchu rozpatrywanego
punktu ciała sztywnego.
Ad2.
Metoda rzutów prędkości
– oparta jest na twierdzeniu Charlesa.
Twierdzenie Charlesa – w bryle sztywnej podczas dowolnego ruchu, rzuty
wektorów prędkości dwóch dowolnych punktów na prostą łączącą te punkty
są sobie równe.
v
A
cos
α
=v
B
cosβ
Zad. Korzystając z rzutów prędkości wyznaczyć prędkość B ogniwa
mechanizmu korbowo-wodzikowego w położeniu przedstawionym na
rysunku, jeśli korba OA obraca się z prędkością ω=2[rad/s]=const.
OA=0,2m; AB=0,6m; α=60˚.
OA
v
OA
A
90
sin
r
v
OA
A
]
/
[
4
,
0
2
,
0
2
s
m
v
A
Kierunek prędkości B jest znany gdyż ogniwo 3 może poruszać się tylko w jeden sposób.
Ad3.
Metoda superpozycji
:
r
r
r
A
B
dt
r
d
dt
r
d
dt
r
d
v
A
B
B
A
A
v
dt
r
d
const
r
r - zmienia się zwrot i kierunek
r
dt
r
d
r
v
v
A
B
B
A
v
AB
v
BA
A
B
v
v
v
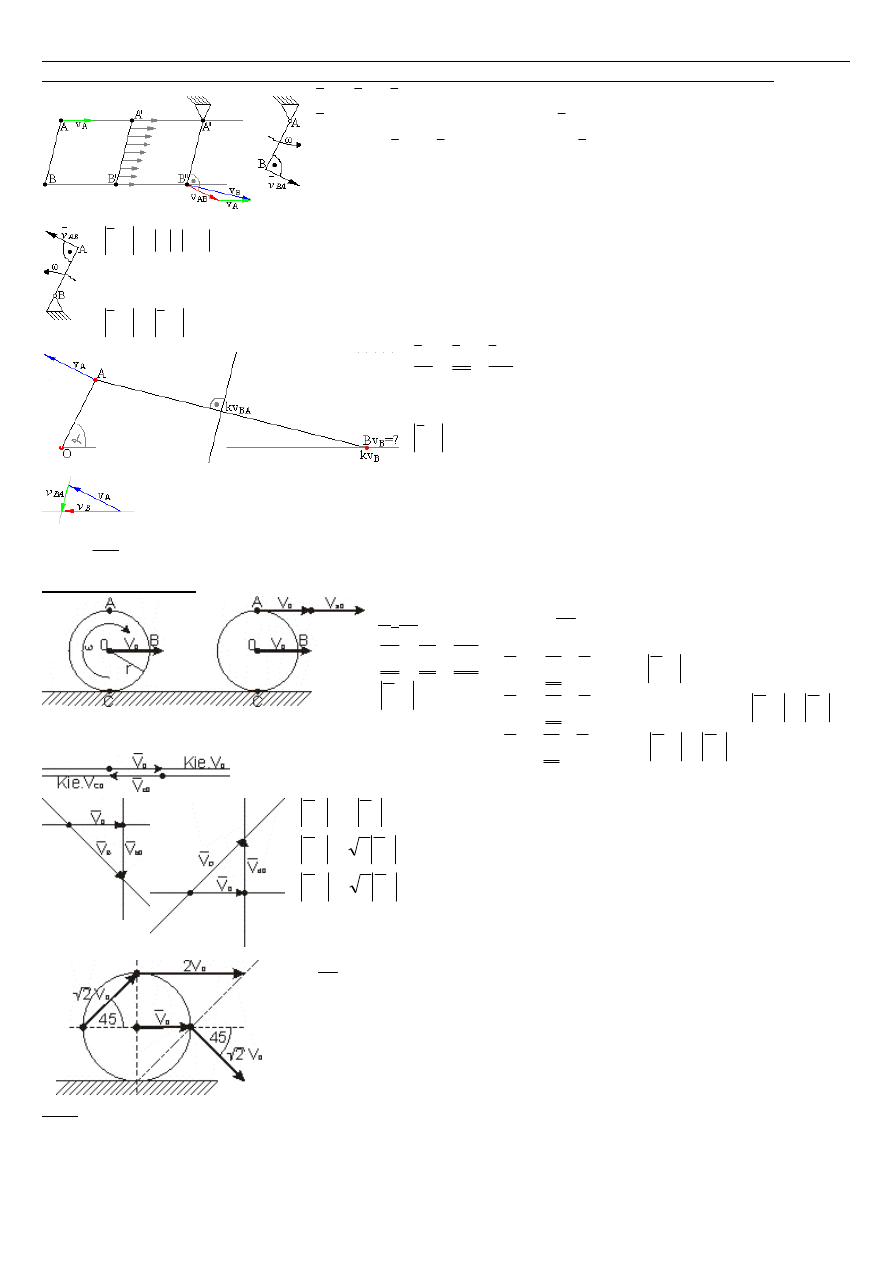
5
Prędkość dowolnego punktu w ruchu płaskim stanowi sumę geometryczną wektora punktu przyjętego
jako biegun oraz wektora prędkości w ruchu obrotowym punktu szukanego względem bieguna.
BA
A
B
v
v
v
BA
v
BA
Kierunek prędkości
BA
v
jest prostopadły do odcinka BA,
a dodani
A
v i
BA
v
daje wartość
B
v .
AB
v
AB
AB
v
AB
ω taka sama
BA
AB
v
v
BA
A
B
v
v
v
v
B
||do prowadnic
BA
v
BA
BA
v
BA
BA
Odkładamy siłę v
A
( znamy ją ) oraz kierunki sił v
B
, i v
BA
– tworzymy plan prędkości z
którego odczytujemy wartości sił nieznanych.
BA
v
BA
BA
Tocząca się tarcza.
V
C
=0
r
V
T
0
0
C
o
C
V
V
V
r
V
T
C
0
kV
C0
C0
0
0
0
2
2
2
V
V
V
V
V
V
D
B
A
r
V
T
0
Ad4.
Metoda chwilowego środka prędkości
. Przemieszczenie ciała w ruchu płaskim można przedstawić
jako obrót dokoła punktu zwanego chwilowym środkiem obrotu.
Chwilowym środkiem obrotu nazywamy w danym położeniu, taki punkt S przekroju dla którego w
danej chwili prędkość liniowa równa jest zero.
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
B
kV
D
kV
V
V
V
V
V
V
V
A
kV
V
V
V
A
V
V
V
V
B
D
B
D
D
A
B
B
T
A
A
A
6
SA
A
S
V
V
V
1
SA
V
SA
V
V
V
SA
V
V
V
SA
SA
SA
A
SA
A
SA
BS
V
x
V
V
SA
SA
V
SA
V
B
B
A
A
SA
W celu wyznaczenia chwilowego środka prędkości wystawiamy prostopadłe do kierunków prędkości
dwóch punktów badanego przekroju poruszającego się ruchem płaskim, punkty przecięcia dają chwilowy
środek prędkości.
AS
V
BS
V
V
S
A
B
S
0
UWAGA! Może być ułożenie wektorów prędkości dla których niema punktu chwilowego obrotu.
DEFINICJA CENTROIDY:
Ruch płaski możemy rozpatrywać jako wiele następujących po sobie obrotów
chwilowych w około przemieszczającego się ośrodka obrotu. Kolejne położenia
środków w układzie nieruchomym nazywamy cętroidą stałą, zaś w układzie
ruchomym cętroidą ruchomą.
0
0
2V
V
r
V
AC
V
A
A
2
2
2
0
r
V
r
BC
V
D
V
B
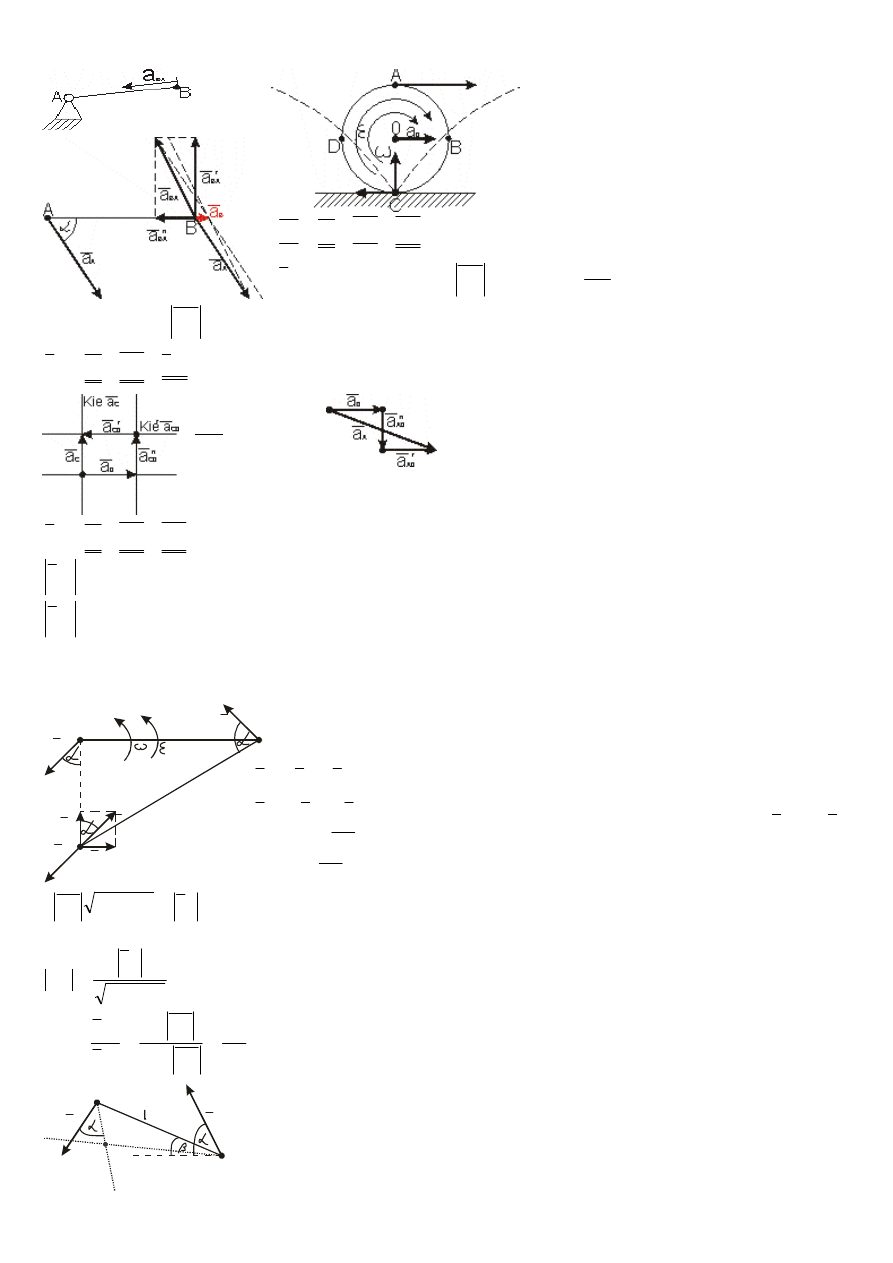
Przyspieszenie w ruchu płaskim.
Metoda super pozycji.
n
BA
T
BA
A
B
a
BA
BA
a
BA
A
B
BA
BA
BA
BA
A
BA
A
a
B
BA
BA
BA
A
B
a
a
a
a
BA
BA
a
a
dt
BA
d
BA
dt
d
dt
BA
d
a
dt
V
d
dt
V
d
dt
V
d
BA
V
V
V
V
n
BA
T
BA
BA
BA
B
BA
a
BA
a
BA
a
BA
a
n
BA
T
BA
BA
n
BA
BA
T
BA
||
2
7
BA
0
0
0
0
0
||
2
2
0
2
0
0
0
0
0
0
C
C
v
C
a
C
C
a
a
a
a
a
C
C
n
C
n
C
n
C
T
C
C
1
0
0
??
0
0
r
T
C
T
C
C
a
C
a
n
A
T
A
A
a
a
a
a
0
0
0
0
0
0
C
T
C
C
a
n
B
t
B
B
a
a
a
a
0
0
0
0
2
0
B
a
n
B
0
0
B
a
t
B
Chwilowy środek przyspieszeń.
W ruchu płaskim bryły w każdej chwili istnieje punkt , którego przyspieszenie jest równe zero – punkt
ten nazywamy chwilowym środkiem przyspieszeń.
Zakładając, że a
p
=0 przyspieszenie punktu P obliczonego metodą
superpozycji, będzie wynosić:
AP
a
AP
a
a
a
a
a
a
a
t
PA
n
PA
t
PA
n
PA
PA
PA
A
P
2
a
P
– przyspieszenie chwilowe środka przyśpieszeń:
A
PA
a
a
P
a
AP
2
2
Odległość chwilowego środka prędkości od punktu A wynosi:
2
2
P
a
AP
2
2
AP
AP
a
a
tg
n
PA
t
PA
BP
a
B
Dane: a
A
=2m/s
2+
a
B
=4m/s
2
l=1m β=30˚
Szukane: ε, ω=?
P=?
A
B
P
I
r
I
a
A
I
a
A
B
I
a
I
a
A
I
a
PA
I
n
I
a
PA
I
t
I
a
PA
I
a
A
P
B
I
a
A
B
8
t
BA
n
BA
A
B
a
a
a
a
Ba
a
BA
a
t
BA
n
BA
||
2
2
2
/
5
/
5
,
3
/
5
,
3
s
m
a
s
m
a
s
m
a
BA
n
BA
t
BA
BA
a
s
m
BA
a
n
BA
n
BA
t
BA
2
/
5
,
3
s
m
s
m
BA
a
n
BA
/
8
,
1
/
5
,
3
1
5
,
3
2
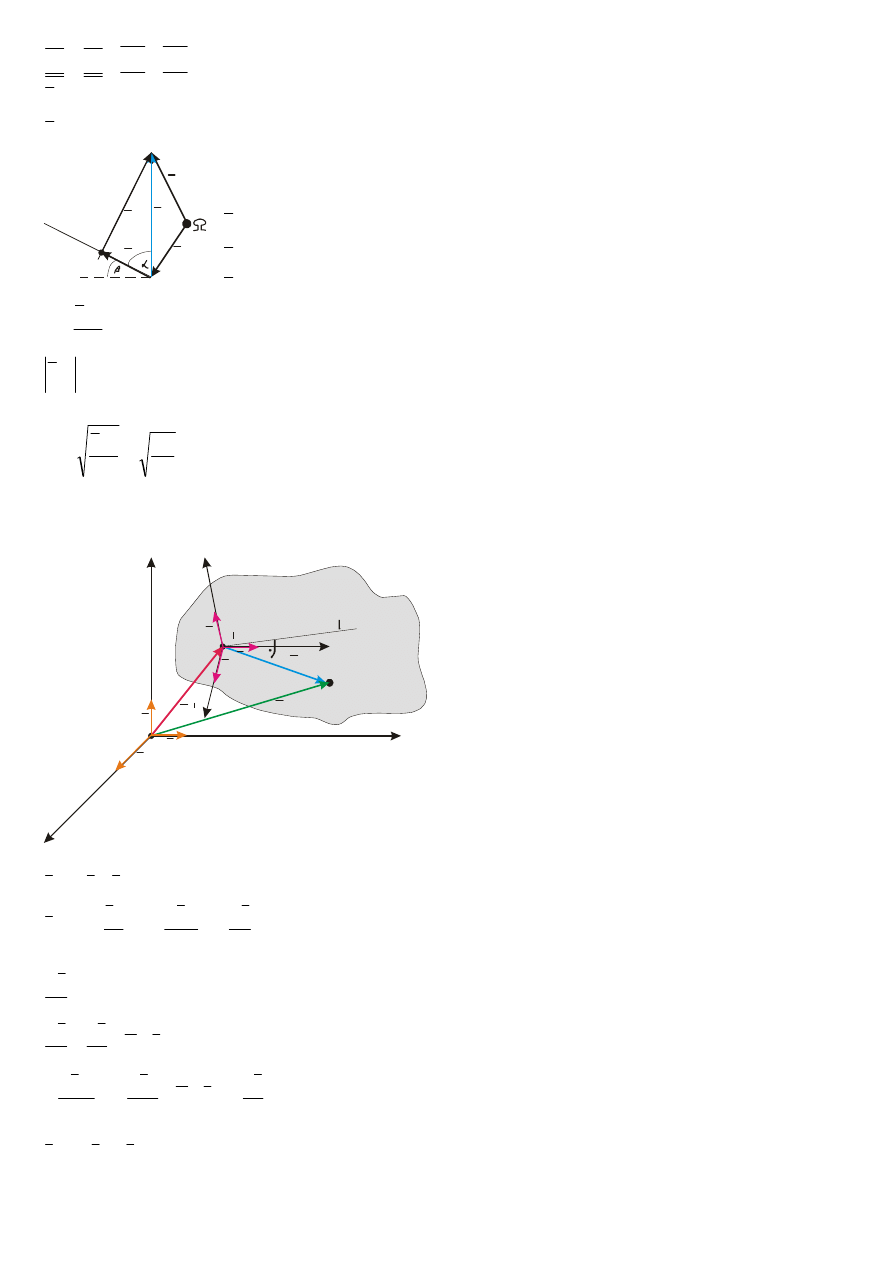
Ruch punktu bryły sztywnej poruszającej się ruchem złożonym – ruch złozony punktu.
Ruch punktu M względem nieruchomego punktu
odniesienia 0XYZ nazywamy ruchem bezwzględnym.
Ruch punktu M względem ruchomego układu
odniesienia 0’xyz nazywamy ruchem względnym.
Ruch układu ruchomego 0’xyz względem układu nieruchomego 0XYZ nazywamy ruchem
unoszenia.
Prędkość i przyspieszenie w ruchu złożonym.
wzglęzgl
unoszenia
a
bezwzglęez
r
M
M
dt
r
d
dt
r
d
dt
v
v
r
r
r
'
'
0
0
-
dt
r
d
zmienia kierunek bez zmiany wartości
wzglęwzg
v
unoszenia
v
0
a
bezwzglęez
v
t
r
r
dt
r
d
dt
r
d
r
t
r
dt
r
d
M
w
u
bM
v
v
v
I
a
PA
I
n
P
I
a
PA
I
tP
B
I
a
A
I
a
A
B
I
a
X
Y
Z
X
Z
Y
M
I
r
I
r
M
I
r
0
I
j
I
k
I
i
I
k
1
I
i
1
I
j
1
0
0
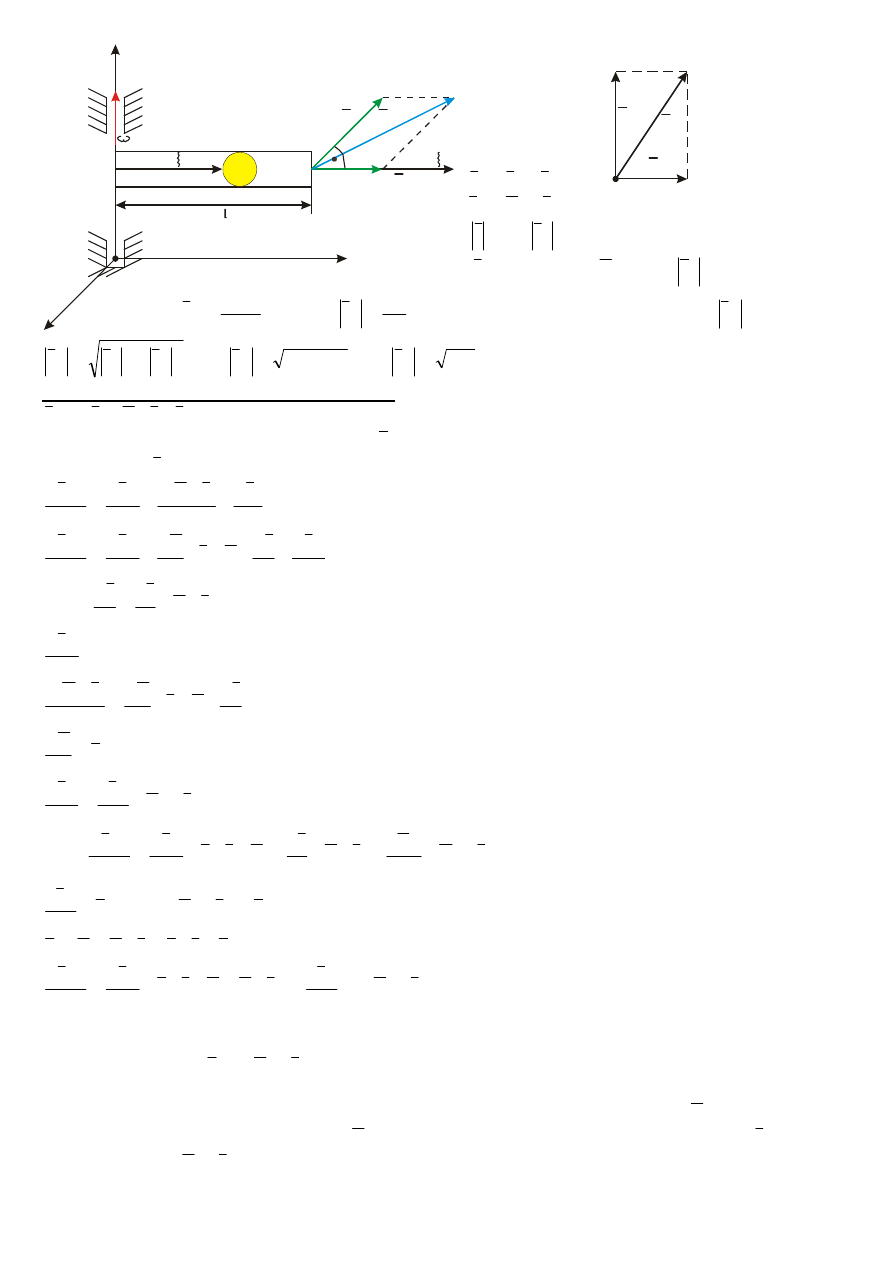
9
ω
u
=2rad/s
ζ(t)=2t
2
[m]
l=8m
Szukane:
V
m
(t
l
)
w
u
b
v
v
v
r
v
u
u
90
sin
8
/
2
m
s
rad
v
l
r
u
s
m
y
plaszczyzn
v
u
u
u
/
16
v
t
t
v
w
t
t
v
w
4
s
t
t
t
2
8
2
2
s
m
v
w
/
8
2
4
2
2
w
u
B
v
v
v
320
64
256
B
B
v
v
Przyspieszenie punktów w ruchu złożonym.
w
bM
r
r
v
v
'
0
Przyspieszenie bezwzględne punktu M=
bM
a
jest równe pochodnej względem czasu prędkości
bezwzględnej
bM
v
tego punktu
dt
v
d
dt
v
d
r
dt
d
dt
v
d
dt
v
d
dt
r
v
d
dt
r
d
dt
v
d
dt
v
d
w
bM
o
bM
'
'
0
gdzie:
r
t
v
dt
v
d
'
'
0
0
a
dt
v
d
dt
v
d
r
dt
d
dt
r
d
dt
d
w
u
w
w
v
dt
v
dt
v
d
więc:
w
u
w
bM
v
t
V
r
t
v
v
dt
v
d
dt
v
d
'
0
w
w
a
dt
v
coriolisa
-
2
c
w
u
a
v
u
a
r
r
a
'
0
coriolisa
wzgledne
unoszenia
0
2
'
a
w
u
a
w
a
bM
v
t
v
r
r
dt
v
d
dt
v
d
Przyspieszenie coriolisa jest podwójnym iloczynem wektorowym prędkości kątowej unoszenia i
prędkości względnej:
w
u
c
v
a
2
Przyspieszenie coriolisa nie występuje czyli jest równe zero, kiedy:
1. Ruchem unoszenia są ruchy: prostoliniowy, harmoniczny, prosty i postępowy:
0
u
2. Gdy wektory prędkości kątowej
jest równoległy do wektora prędkości względnej
w
v
w
u
v
||
X
Z
Y
I
m
(t)
V
B
V
I
u
V
I
w
Ia
Ia
V
B
V
I
u
V
I
w
10
3. W przypadku kiedy prędkość względna
w
v będzie równa zero
0
, przyspieszenie coriolisa
jest wektorem
do płaszczyzny utworzonej przez wektory
w
u
v
,
.
Zwrot przyspieszenia coriolisa zgodny jest z regułą śruby prawo skrętnej
w
u
c
a
v
i
Wartość:
w
w
u
c
v
v
a
,
sin
2
r=0,2m
α=60˚
s
rad
2
2
6t
t
t=3[s]
?
c
a
BA
A
B
v
v
v
v
A
’=v
B
’
v
A
=v
B
B
A
v
v
v
0
u
Ruch postępowy, a więc przyspieszenie coriolisa jest równe zero.
0
c
a
bo prędkość unoszenia jest równoległa do prędkości
w
u
c
v
a
2
2
32
1
8
2
2
s
m
s
m
s
rad
a
c
Ruch kulisty –
jest to taki ruch ciała sztywnego podczas którego jeden punkt zwany środkiem ruchu
kulistego jest nieruchomy, zaś torami pozostałych punktów są powierzchnie kuli o środku w punkcie
będącym środkiem ruchu kulistego.
Ruch kulisty opisujemy przy pomocy kątów Eulera.
φ – kąt obrotu własnego
ψ – kąt precesji
–kąt nutacji
C
I
a
W
I
v
A
B
I
(t)
A
B
I
(t)
A
V
B
V
U
V
A
V
B
V
Z
I
(t)
I
(t)
Z
V
B
I
u
V
X
Y
Z
0
N
Zeta
Teta
Xi
Płaszczyzna
teta - xi
Płaszczyzna
XY
Krawędź przecięcia
płaszczyzn
X
Y
Z
N
Zeta
Teta
Xi
0
1
2
3
2
1
3
12
11
Kąty Eulera:
Podczas ruchu ciała sztywnego wartości kątów obrotu własnego, precesji, nutacji zmieniają się w czasie:
t
f
1
t
f
2
t
f
3
Aby jednocześnie określić ruch należy podać trzy równania.
Ruch ciała sztywnego w ruchu kulistym ma trzy stopnie swobody.
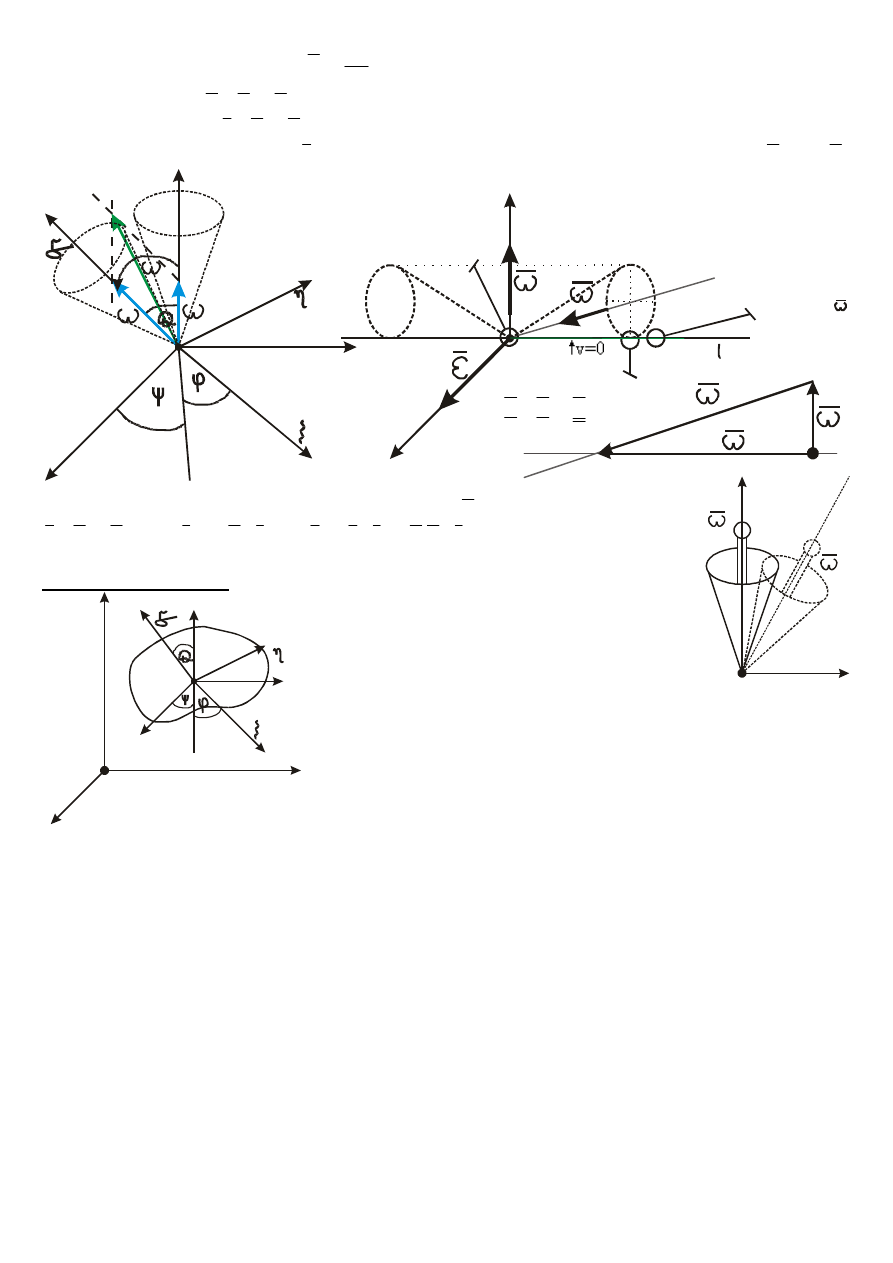
Prędkość kątowa w ruchu kulistym.
dt
d
1
- prędkość kątowa obrotu własnego
dt
d
2
- prędkość kątowa precesji
dt
d
3
- prędkość kątowa nutacji
Prędkość kątowa wyrażona jest jako suma geometryczna:
3
1
Prędkość dowolnego punktu w ruchu kulistym.
r
dt
v
d
v
OBROTOWY KULISTY
ω - chwilowa
Przyspieszenie w ruchu kulistym.
dt
r
d
r
dt
d
dt
r
d
dt
v
d
a
v
r
dt
v
d
dt
d
, stąd:
D
a
v
a
r
r
a
0
a
o
– przyspieszenie obrotowe,
a
D
– przyspieszenie do osiowe.
D
o
a
a
a
Precesja regularna: kąt nutacji jest stały, a prędkość nutacji równa się zero – wartości prędkości obrotu
własnego i precesji są stałe.
.
.
0
.
2
1
3
const
const
const
0
I
l
I
r
I
l=const.
r
v
I
r
r
v
12
Prędkość kątowa precesji wynosi:
0
3
dt
d
Suma geometryczna:
2
1
Przyspieszenie kątowe:
2
Wektor przyspieszenia kątowego
jest prostopadły do płaszczyzny wyznaczonej wektorami
1
oraz .
1.
Szukamy
chwilowej
osi obrotu
dla
danego
położenia.
Prędkość
punktów leżących na chwilowej osi
obrotu jest równa 0.
2. Szukamy punktów nieruchomych ( 1, 2 ) jest to oś
.
2
A
r
v
AC
m
V
An
m
u
r
r
a
Ruch bryły swobodnej.
Położenie bryły sztywnej w ruchu dowolnym będzie
jednoznacznie określone jeżeli w danej chwili
czasowej będą znane współrzędne ruchomego układu
x
0
(t), y
0
(t), z
0
(t) oraz kąty
t
,
t
,
t
.
X
Y
Z
1
2
12
X
Z
Y
1
2
0
1
2
Chwilowa oś obrotu,
na niej znajduje się
2
1
2
1
1
2
X
Y
Z
Z
X
Y
0
1
0
13
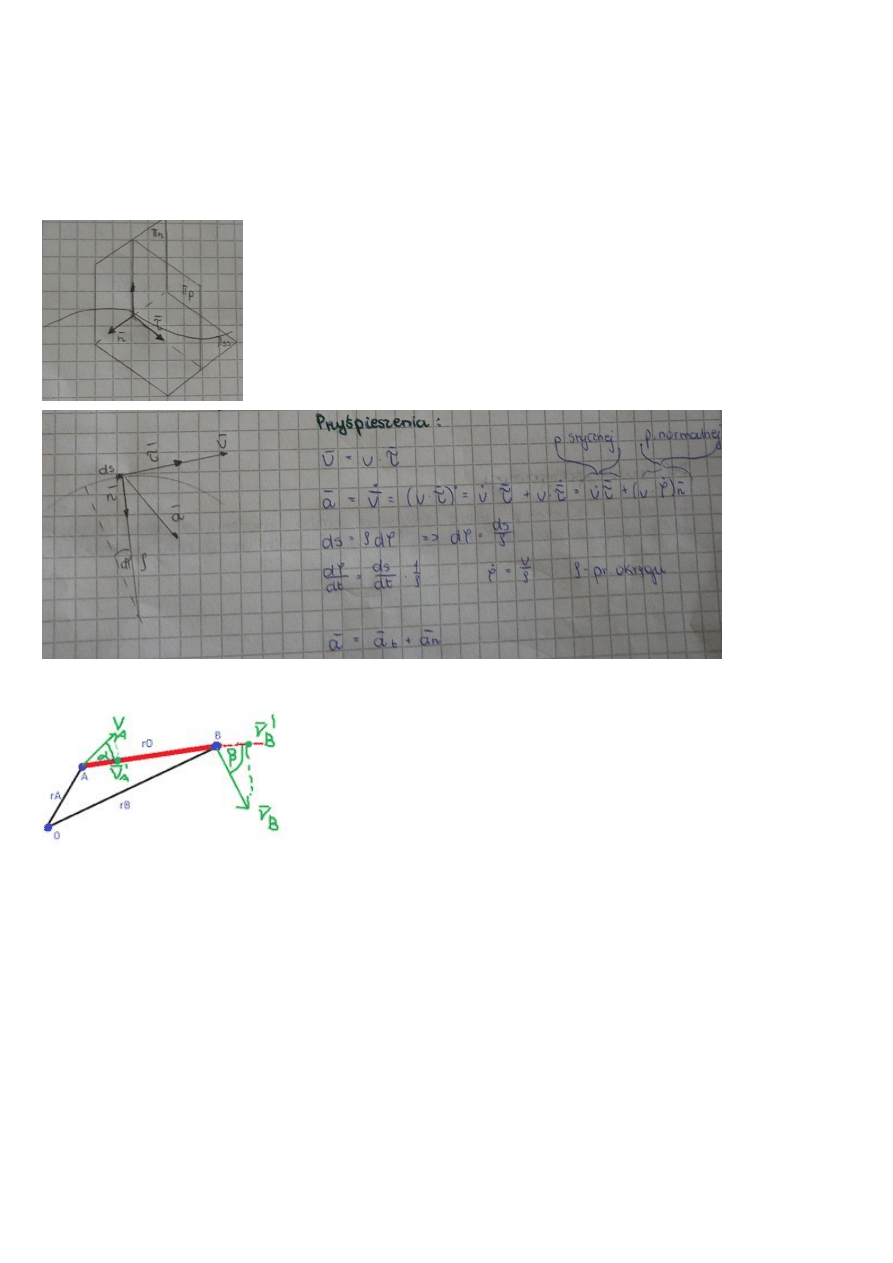
Naturalny układ współrzędnych
Podczas ruchu punktu po dowolnym torze możemy poprowadzić do toru
płaszczyznę ściśle styczną(π
ss
), płaszczyznę normalną (π
n
) i płaszczyznę prostującą
(π
p
) w miejscu w którym znajduje się aktualnie rozważany punkt. Krawędzie
przecięcia się płaszczyzn są osiami: styczną normalną główną i binormalną.
Trójścian FRENETA
Twierdzenie o ruchu prostej:
rzuty prędkości dwóch dowolnych punktów ciała sztywnego na prostą łączącą te
punkty są sobie równe.
(WEKTOROWO)
r0•r0=|r0|
2
=const
(rB-rA)
2
-r0
2
=0 po zróżniczkowaniu względem czasu i przyjęciu oznaczeń:
rB+rA=r, (rA)’=VA, (rB)’=VB daje rVB=rVA czyli
rVAcos(r,VA)=rVBcos(r,VB) VAcos(r,VA)=VBcos(r,VB)
Aksoidy
Aksoida ruchoma jest to miejsce geometryczne chwilowych osi obrotu w układzie ruchomym.
Aksoida nieruchoma jest to miejsce geometryczne chwilowych osi obrotu w układzie nieruchomym
Wyszukiwarka
Podobne podstrony:
ZAGADNIENIA PORUSZONE NA WYKŁADACH W II SEMESTRZE
Mechanika wykad II semestr
Szkółkarstwo - wykład II - semestr IV - 05.03.2013, Ogrodnictwo, Semestr IV, Szkółkarstwo
Wykłady, I i II semestr - Ekonomia, CHARAKTERYSTYKA EKONOMII JAKO DYSCYPLINY NAUK
wykład II, Semestr IV, PPUE
Układ moczowy, II rok, II rok CM UMK, Histologia i cytofizjologia, wykłady II semestr
Metody badań społecznych wykłady, II semestr, Wykłady
HWP wykłady, II semestr, Wykłady
UZ1 - chemia - wyklady-1, II semestr, Chemia budowlana, Wykłady, Całość
Klasyczne teorie socjologiczne – wykłady, II semestr, Wykłady
Wprowadzenie do psychologii – wykłady, II semestr, Wykłady
Prawo Karne - wykład II Semestr 10-11, Prawo karne
Fizjologia roślin - wykład II - semestr IV - 05.02.2013, Ogrodnictwo 2011, Fizjologia roslin
geometria notatki z wykładów II semestr
Etyka biznesu - wykład II, Semestr 1, Etyka biznesu
MIKROEKONOMIA - wyklady, II semestr BW
PATOFIZJOLOGIA-Wyklady-I-i-II-semestr, Weterynaria Lublin, Weterynaria 1, Patofizjologia
więcej podobnych podstron