Zastosowanie “softstartu” silnik indukcyjny
układy „soft - start” (miękkiego rozruchu), które mają za zadanie redukuję niekorzystnych zjawisk występujących podczas rozruchu,
wpływających na żywotność silników i jakość ich pracy. Ich zasada działania opiera się na, płynnej regulacji napięcia podawanego na
uzwojenia (lub jedno z uzwojeń) W roli elementów sterujących stosuje się najczęściej tyrystory. Zwykle urządzenia takie umożliwiają
kontrole i możliwość nastawienia wielu parametrów takich jak czas rozruchu, wartość początkowego momentu rozruchowego, kolejności
faz i czy temperaturę przegrzania.
Urządzenia Soft-Start zapewniają:
Płynny rozruch i zatrzymanie napędu
- ograniczają prądy rozruchowe,
- ograniczają rozruchowe spadki napięcia,
- eliminują udary mechaniczne.
Efektywną pracę napęwdu
- podłączenie tylko 3-ma przewodami,
- wydłużenie czasu pracy elementów mechanicznych i elektromech. nawet o 150%,
- eliminacja udarów hydraulicznych (przy starcie i zatrzymywaniu)
1 fazowe sterowanie
2 fazowe sterowanie
3 fazowe sterowanie
Niski koszt
Doskonała cena/parametrów
Soft start/stop
Redukcja prądu rozruchu
Soft start/stop
Redukcja prądu rozruchu
Symetryczne napiecie
Potrzebny dodatkowy stycznik i jego sterowanie
Grzanie się silnika przy rozruchu
Duże odkształcenie momentu rozruchowego
Duża asymetria napięcia wyjściowego
Nieduże ograniczenie prądu rozruchu
Asymetryczne napięcia na
wyjściu
Niewielkie nagrzewanie silnika
podczas rozruchu
Większa cena
Złożone sterowanie
Przyrządy półprzewodnikowe stosowane w energoelektronice
Podstawowym zadaniem jest przetwarzanie energii elektrycznej (napięcia, prądu, częstotliwości). Drugim jest łączenie obwodów
elektrycznych (łączniki prądu przemiennego, stałego - elektroniczne styczniki).Istnieją cztery możliwe rodzaje przekształtników (układów
zamieniających postacie energii):
Prostowniki - zamiana napięcia zmiennego (AC) na stałe (DC) - ang. rectifier
Falowniki - odwrotnie tzn. DC -> AC - ang. inverter
Przekształtniki prądu zmiennego - AC -> AC (o innych parametrach) - ang. cycloconverter, cycloinverter
Przekształtniki prądu stałego - DC -> DC - ang.chopper
Dodatkowo można wyróżnić łączniki prądu zmiennego i stałego.
podział ze względu na sposób przekształcania źródeł:
−
pośrednie (np. przemienniki częstotliwości)
−
bezpośrednie (np. prostowniki)
podział ze względu na budowę:
−
proste
−
złożone
•
połączenie kaskadowe
•
połączenie równoległe
podział ze względu na kierunek przepływu prądu i energii, zwrot napięcia:
−
nawrotne i nienawrotne
−
odzyskowe i nieodzyskowe
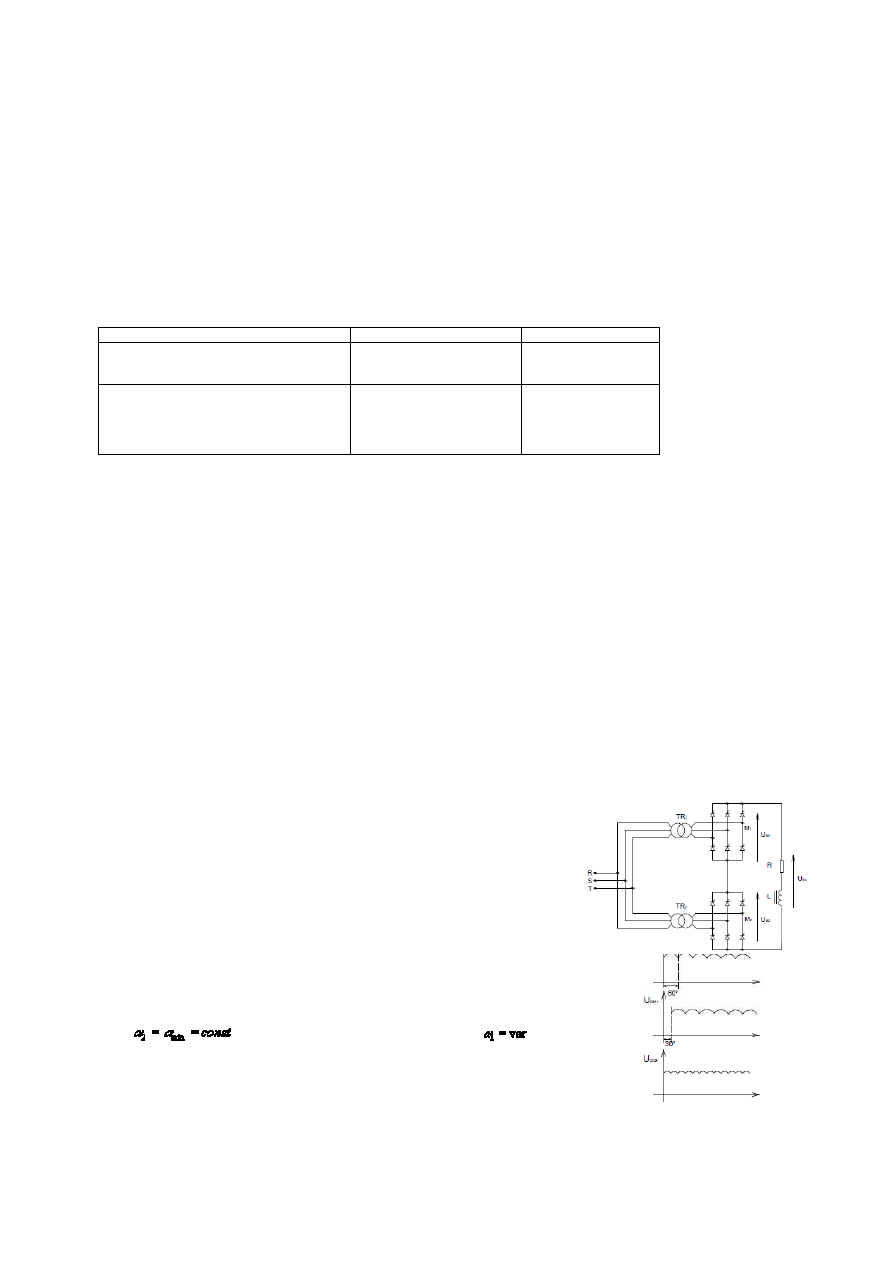
Tyrystorowe przekształtniki złożone szeregowe
W celu uzyskania większego napięcia wyjściowego, czy możliwości zastosowania tyrystorów
na mniejsze napięcia znamionowe stosuje się szeregowe połączenie przekształtników. Układy
tego typu wykorzystuje się do zasilania obciążeń dużej mocy prądu stałego, jak np. górnicze
maszyny wyciągowe.
Każdy z przekształtników zasilany jest z oddzielnego uzwojenia transformatora. Dodatkowo
uzwojenia te mogą mieć różne lub takie same grupy połączeń (y lub d).
Układ może być sterowany:
•
symetrycznie - jednoczesne sterowanie mostków M1 i M2
•
kolejnościowo (sekwencyjne).
Sterowanie symetryczne (jednoczesne, wspólne)
Polega ono na wyzwalaniu poszczególnych tyrystorów obu mostków jednakowym kątem
opóźnienia. Napięcia wyjściowe mostków będą miały identyczne wartości. W sumie na
odbiorniku otrzymamy podwojone napięcie jednego mostka.
Sterowanie kolejnościowe (sekwencyjne)
Polega ono na ustaleniu stałej wartości kąta opóźnienia jednego z mostków (M2), a regulację napięcia
wyjściowego realizujemy poprzez zmianę kata drugiego mostka (M1).
Np:
(wtedy mamy maksymalne napięcie wyjściowe); a
Kształt pobieranego z sieci prądu ma podobny wygląd jak poprzednio, co sugeruje podobną zawartość
wyższych harmonicznych generowanych przez układ. Poprawie natomiast ulega WM oraz związany z
nim pobór mocy biernej.
Gdy chcemy osiągnąć mniejszy współczynnik mocy korzystniej jest zastosować sterowanie
kolejnościowe a gdy zależy nam na jak najmniejszej zawartości wyższych harmonicznych generowanych do sieci przez przekształtnik należy
zastosować układ zasilany transformatorem o dwóch uzwojeniach wtórnych o różnych grupach połączeń i sterowanie wspólne.
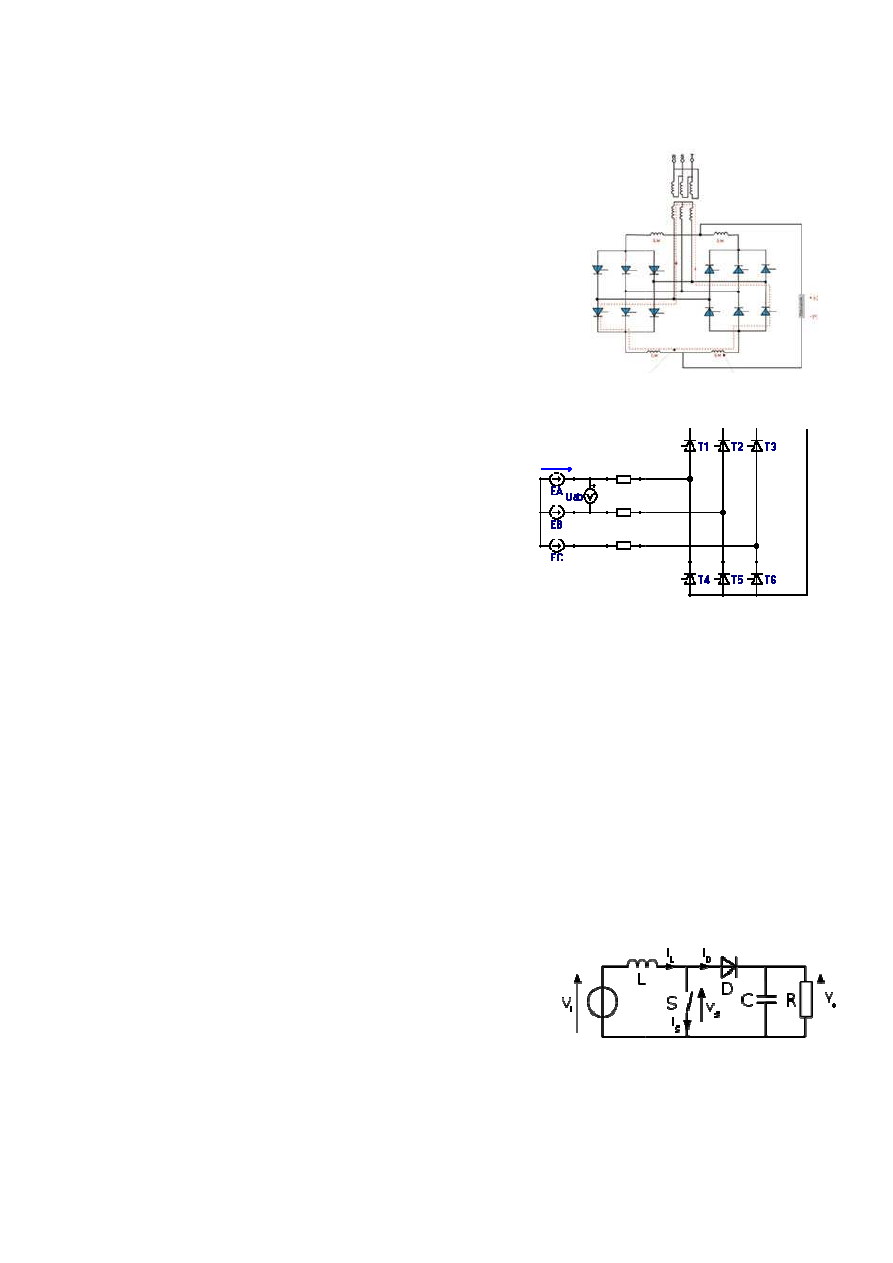
Tyrystorowe przekształtniki zło
Przekształtnik nawrotny jest połączeniem dwóch przekształtników w pełni
takich jak mostek tyrystorowy 6-pulsowy.
Układ nawrotny pozwala na zmian
obciążenia. Zmiana ta może odbywać się dwojako, tj. bez przerwy w przepływie pr
obciążenia lub z minimalną zwłoką czasową w przepływie pr
odbędzie się zmiana kierunku prądu, decyduje sposób sterowania układem nawrotnym, a układ
taki można sterować zależnie lub rozdzielnie.
na jednoczesnym wysterowaniu tyrystorów obu przekształtników
jeden pracuje jako prostownik, a drugi jako falownik.
sterowanie symetryczne oraz niesymetryczne. Pierwsze z nich polega na takim sterowaniu obu
przekształtników składowych, że wartości średnie i
przy sterowaniu zależnym niesymetrycznym róż
mostków może być dodatnia lub ujemna. Wadą
Strefy martwej, tzn. przerw w prądzie obciążenia przez wspomniany powy
Takie zachowanie układu nawrotnego nie jest dopuszczalne, gdy mamy do czynienia z
odbiornikiem, którym przykładowo jest silnik dź
prądu obciążenia grozi opadaniem ładunku. W sterowaniu rozdzielnym nie wyst
Tyrystorowe regulatory mocy jedno i trójfazowe
Regulatora mocy możemy więc zastosować zwykły prostownik mostkowy wraz ze
sterownikiem. Warunkiem takiego ułatwienia jest nieskojarzony odbio
trójfazowy (muszą być dostępne dwa zaciski każ
Napięcie na wybranej fazie odbiornika może być
•
równe zeru - nie przewodzi żaden z tyrystorów wł
fazie;
•
równe połowie napięcia międzyfazowego
rozpatrywanej fazy oraz któryś z pozostałych dwóch faz;
•
równe napięciu fazowemu - przewodz
fazach.
Wady sterownika mocy
Odkształcony przebieg prądu przy regulacji mocy powoduje powstawanie wy
harmonicznych. Podobnie jak w prostownikach s
prostowników ze względu na łagodniejsze narastanie / opadanie pr
Jedno i trójfazowe falo
Modulacja szerokości impulsów (PWM) w falownikach
Podstawowym i najszerzej stosowanym sposobem zarówno sterowania amplitud
przebiegu w taki sposób aby wyeliminować z napi
impulsów. Przy częstotliwości łączeń wielokrotnie wi
możliwe jest aproksymowanie wartości tego przebiegu w przedziale
których na wyjściu falownika pojawia się napię
Modulacja w falownikach 3-fazowych PWM
Stosując dla każdej z gałęzi modulację sinusoidaln
modulującego funkcja przełączająca. Na rysunku
o naturalną komparację sinusoidalnych sygnałów odwzorowywanych z
falowniku bez modulacji napięcie wyjściowe przyjmuje warto
intensywności udziału stanu zerowego napięcia
reprezentacje fizyczne: załączenie łączników górnych
Impulsowe układy DC/DC do obni
(boost) napięcia.
Funkcje przekształtników DC-DC
•zmiana poziomu napięcia DC;
•stabilizacja napięcia w odpowiedzi na wahania parametrów
•redukcja tętnień w przebiegu napięcia wyjściowego;
•możliwość uzyskania izolacji galwanicznej pomi
Przekształtnik podwyższający napięcie - rodzaj przerywacza impulsowego
stałego. Vo= Vd(1/1-D) Role przełącznika pełni zazwyczaj
Układ składa się z co najmniej dwóch zaworów półprzewodnikowych (
i co najmniej jednego elementu magazynującego energi
niwelować zniekształcenia napięcia wyjściowego, stosuje si
odpowiedni filtr. Zasilanie układu może pochodzi
takich jak baterie, Ogniwa fotowoltaiczne jak i równie
podwyższającym napięcie odgrywa zdolność cewki indukcyjnej do „przeciwstawiania sie” zmianom przepływaj
zasilający płynie, cewka pochłania energie, natomiast kiedy zasilanie jest odł
energie sama stanowi swoiste źródło energii (w obwodzie płynie zmniejszaj
energii). Tak wytworzone napięcie podczas rozładowania cewki jest podobne w swoim przebiegu do aktualnego przebiegu pr
pierwotnego cyklu ładowania, dzięki czemu uzyskujemy ró
ekształtniki złożone równoległe
czeniem dwóch przekształtników w pełni sterowanych,
kład nawrotny pozwala na zmianę kierunku prądu
ć
ę
dwojako, tj. bez przerwy w przepływie prądu
ą
w przepływie prądu obciążenia. O tym, jak
du, decyduje sposób sterowania układem nawrotnym, a układ
nie lub rozdzielnie. Sterowanie zależne układów nawrotnych polega
na jednoczesnym wysterowaniu tyrystorów obu przekształtników składowych tak, że zawsze
jeden pracuje jako prostownik, a drugi jako falownik. W sterowaniu zależnym wyróżnia się
sterowanie symetryczne oraz niesymetryczne. Pierwsze z nich polega na takim sterowaniu obu
ś
ś
rednie ich napięć wyjściowych są równe. Natomiast
nym niesymetrycznym różnica wartości średnich napięć wyjściowych obu
Wadą sterowania rozdzielnego jest występowanie
ąż
enia przez wspomniany powyżej czas ok. 10 ms.
Takie zachowanie układu nawrotnego nie jest dopuszczalne, gdy mamy do czynienia z
odbiornikiem, którym przykładowo jest silnik dźwigu lub wciągarki – przerwa w przepływie
ładunku. W sterowaniu rozdzielnym nie występują prądy wyrównawcze.
latory mocy jedno i trójfazowe
ć
zwykły prostownik mostkowy wraz ze
sterownikiem. Warunkiem takiego ułatwienia jest nieskojarzony odbiornik
pne dwa zaciski każdej fazy).
ż
e być:
ż
aden z tyrystorów włączonych szeregowo w
ę
dzyfazowego - przewodzi jeden z tyrystorów
ś
z pozostałych dwóch faz;
przewodzą tyrystory we wszystkich trzech
du przy regulacji mocy powoduje powstawanie wyższych
jak w prostownikach są to: 5, 7, 11, 13 ... Układy te jednak generują mniej harmonicznych od układów
du na łagodniejsze narastanie / opadanie prądu. Drugą wadą jest pobór mocy biernej przez sterownik.
Jedno i trójfazowe falowniki napięcia z modulacją PWM
ci impulsów (PWM) w falownikach
Podstawowym i najszerzej stosowanym sposobem zarówno sterowania amplitudą podstawowej harmonicznej jak i ukształtowaniu spektrum
ć
z napięcia harmoniczne niskiego rzędu jest zastosowanie metody PWM
ń
wielokrotnie większej od podstawowej częstotliwości przebiegu generowanego na wyj
przebiegu w przedziale impulsowania Ts =fs stosując jedną z metod wyliczania czasów w
ę
napięcie dodatnie (+Ud/2) lub ujemne(-Ud/2).
fazowych PWM
oidalną w sposób. W każdym cyklu wyznaczana jest na podstawie warto
ca. Na rysunku przedstawiono procedurę wyznaczaniu stanu łączników i napięć
nych sygnałów odwzorowywanych z pomocniczym przebiegiem trójkątnym. Podobnie jak w trójfazowym
ś
ciowe przyjmuje wartości ±Ud/3 i ±2Ud/3 oraz 0. Można przyjąć, że właś
ięcia regulowana jest amplituda sterowanej harmonicznej podstawowej. Stan zerowy
ą
czników górnych - stan „0” oraz załączenie łączników dolnych - stan „7”.
Impulsowe układy DC/DC do obniżania (buck) i podwyż
cia w odpowiedzi na wahania parametrów źródła i obciążenia;
ś
ciowego;
pomiędzy we i wy
rodzaj przerywacza impulsowego prądu
ą
cznika pełni zazwyczaj MOSFET, IGBT lub BJT.
niej dwóch zaworów półprzewodnikowych (tranzystora i diody)
ą
cego energię. Ponadto aby dodatkowo
ś
ciowego, stosuje się przy użyciu kondensatorów
ż
e pochodzić z wszelakich źródeł napięcia stałego
jak i również z prostowników czy generatorów prądu stałego.Kluczową
ść
cewki indukcyjnej do „przeciwstawiania sie” zmianom przepływają
cy płynie, cewka pochłania energie, natomiast kiedy zasilanie jest odłączone cewka wykorzystując wcześ
ródło energii (w obwodzie płynie zmniejszający się prąd aż do rozładowania zmagazynowanej w cew
cie podczas rozładowania cewki jest podobne w swoim przebiegu do aktualnego przebiegu pr
ki czemu uzyskujemy różne napięcia wejściowe i wyjściowe.
mniej harmonicznych od układów
jest pobór mocy biernej przez sterownik.
ą
PWM
podstawowej harmonicznej jak i ukształtowaniu spektrum
jest zastosowanie metody PWM- modulacji szerokości
ci przebiegu generowanego na wyjściu falownika
ą
z metod wyliczania czasów w
wartości zadanego sygnału
czników i napięć dla każdej z faz w oparciu
Podobnie jak w trójfazowym
ąć ż
e właśnie za pomocą
regulowana jest amplituda sterowanej harmonicznej podstawowej. Stan zerowy ma dwie
ania (buck) i podwyższania
.Kluczową rolę w przetworniku
cewki indukcyjnej do „przeciwstawiania sie” zmianom przepływającego prądu. Kiedy prąd
ą
c wcześniej zmagazynowana
do rozładowania zmagazynowanej w cewce
cie podczas rozładowania cewki jest podobne w swoim przebiegu do aktualnego przebiegu prądu a nie do
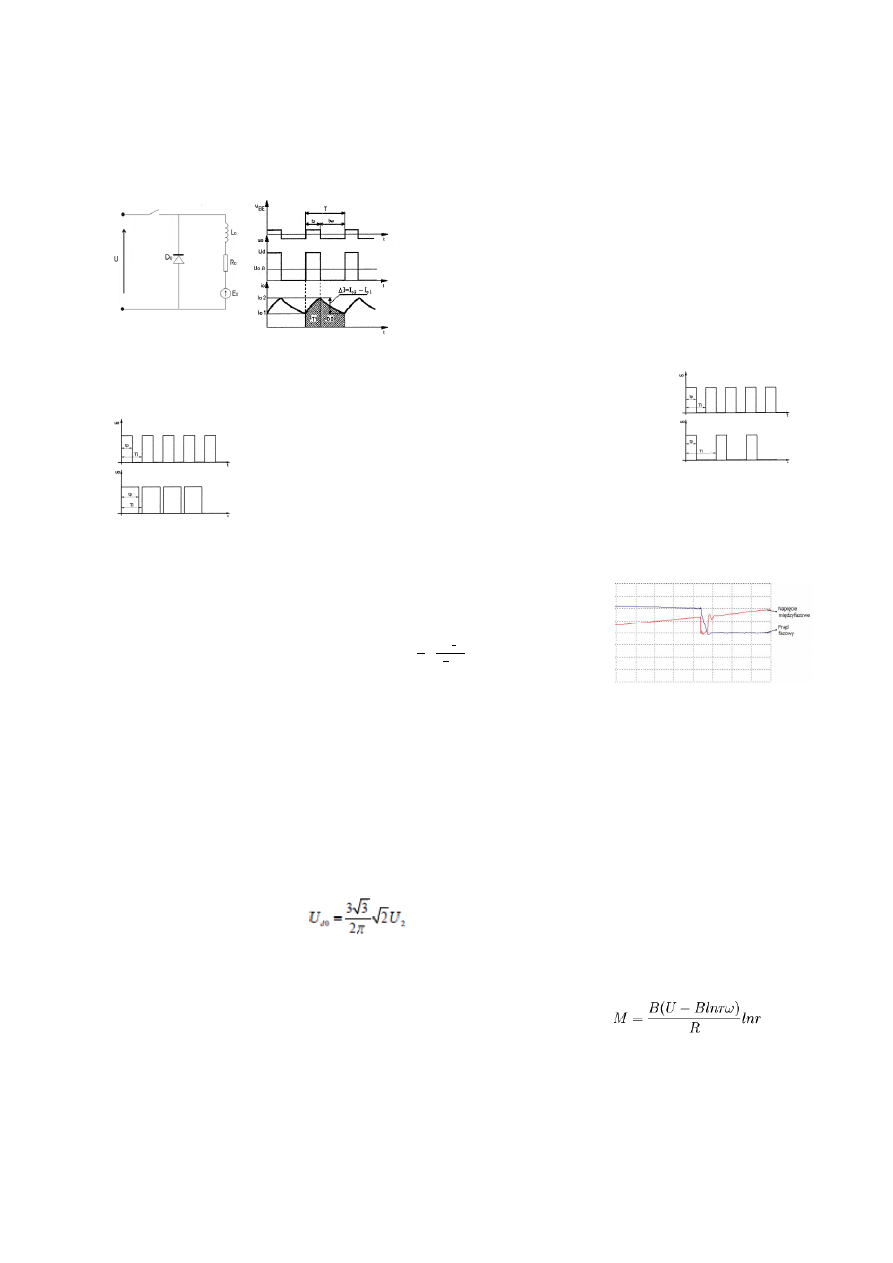
Tryby pracy
•
Tryb pracy ciągłej - Gdy tranzystor wysterowany jest w sposób zapewniaj
spada do zera.
•
Tryb pracy przerywanej - Załączenie tranzystora nast
powoduje przerwę w ciągłości prą
PRZETWORNIKI OBNIŻAJĄCE NAPIĘ
Jak wspomniano powyżej, ten rodzaj przetworników DC/DC ma najszersze zastosowania.. Regulacj
poprzez zastosowanie dwu sposobów modulacji :
a)
modulację częstotliwości
b)
modulację szerokości impulsu
W metodzie modulacji cz
szerokość impulsu napi
częstotliwość kluczowania j
wyjściowego okre
W metodzie modulacji szeroko
zamknięcia klucza jest regulowa
opisać identyczną
oddziaływanie na linię zasilaj
Przekształtniki energoelektroniczne o komutacji sieciowej stanowi
przyrządy półprzewodnikowe wchodzące w ich skład, których char
przekształtnika tyrystorowego na sieć zasilają ą
-komutacyjne załamanie napięcia - Komutacją
komutacji następuje proces przenoszenia się prą
przez czas komutacji dwa tyrystory tej samej grupy
międzyfazowego U
AB
. Komutacja zmniejsza harmoniczne:
-generacja wyższych harmonicznych -
harmoniczne. Ze względu na symetrię układu przekształtnika sze
nie generuje składowych parzystych. Wystę
współczynnikach szeregu Fouriera w sposób jawny.
-pobór mocy biernej - Niekorzystną cechą prostownika tyrystorowego jest moc bierna podstawowej harmonicznej, obci
linię przesyłową. Moc ta jest zmienna w czasie, gdy
(
α
+
µ
/2)=π/2 czyli dla U
d
=0 wartość największ
dodatkowymi kosztami dla odbiorcy energii.
Proces komutacji
Komutacją w układach tyrystorowych nazywa si
drugi. W zależno ci od tego czy w procesie komutacji uczes
- komutację prostą, pojedynczą(między zaworami dwóch ramion przekształ
- komutację złożoną, wielokrotną(w komutacji uczestnicz wi
Komutacja złożona występuje tylko w stanach
prądu znamionowego. Komutacja prądu odbywa si
ź
ródłowych dwóch komutujących faz.
Ogólne zasady regulacji pr
obcowzbudnego prądu stałego
Ze wzoru wynika, że jeżeli indukcja magnetyczna stojana nie zale
ten jest spełniony dla silnika obcowzbudnego, to:
•
moment obrotowy silnika jest najwię
•
obroty silnika zależą od momentu obci
prawie stałe obroty w zakresie – od biegu luzem do obci
•
obroty silnika nieobciążonego zależą
jałowego)
Silnik prądu stałego – regulacja prędkości obrotowej
• przez zmianę napięcia zasilania twornika U,
Gdy tranzystor wysterowany jest w sposób zapewniający pracę ciągłą prąd płynący przez cewk
ą
czenie tranzystora następuję dopiero gdy prąd zmagazynowany w cewce zostanie rozładowany, co
ś
ci prądu odbiornika
CE NAPIĘCIE
ej, ten rodzaj przetworników DC/DC ma najszersze zastosowania.. Regulację wartości średniej napi
dwu sposobów modulacji :
W metodzie modulacji częstotliwości czas załączenia klucza wyznaczający
ść
impulsu napięcia wyjściowego jest stały (t
p
= const), natomiast
ść
kluczowania jest regulowana (1/T
i
= var.). Wartość średnia napięcia
ciowego określona jest zależnością : U
ośr
= U
o
(t
p
/T
i
).
W metodzie modulacji szerokości impulsu częstotliwość kluczowania jest stała (1/T
ę
cia klucza jest regulowany (t
p
= var.). W rezultacie wartość średnia napięcia wyj
ć
identyczną jak w poprzednim przypadku zależnością : U
ośr
= U
o
(t
p
/T
i
).
oddziaływanie na linię zasilającą
Przekształtniki energoelektroniczne o komutacji sieciowej stanowią dla linii zasilającej odbiorniki o charakterze nieliniowym
ą
ce w ich skład, których charakterystyki napięciowo- prądowe są nieliniowe .
ć
zasilającą:
Komutacją nazywamy proces przenoszenia się prądu. W czasie
przenoszenia się prądu pomiędzy tyrystorami z T1 na T3. Przewodzące
przez czas komutacji dwa tyrystory tej samej grupy – T1, T3 powodują zwarcie napięcia
Komutacja zmniejsza harmoniczne:
W prądzie zasilania przekształtnika występują wyższe
ę
układu przekształtnika sześciopulsowego (6x50Hz = 300Hz)
nie generuje składowych parzystych. Występują za to harmoniczne 5, 7, 11, 13 itd. Wartość prądu obciąż
współczynnikach szeregu Fouriera w sposób jawny.
ą
cechą prostownika tyrystorowego jest moc bierna podstawowej harmonicznej, obci
czasie, gdyż jej wartość jest funkcją średniej wartości napięcia wyprostowanego. Osi
ść
największą. Q =Pier(3)*U
p
*J
1
*sin(fi). Moc bierna obciąża system energetyczny, co jest zwi
adach tyrystorowych nazywa się zjawisko przejmowania przewodzenia prądu odbiornika od jednego z
komutacji uczestnicz tyrystory dwóch czy te większej ilości kolejnych faz rozró
zaworami dwóch ramion przekształtnika)
(w komutacji uczestnicz więcej niż dwa ramiona przekształtnika)
lko w stanach zwarcia przekształtnika. Warto prądu odbiornika jest wtedy wielokrotnie wi
du odbywa się pod wpływem napięcia komutacyjnego będącego różnica chwilowych warto
Ogólne zasady regulacji prędkości obrotowej na przykładzie silnika
ą
du stałego
eli indukcja magnetyczna stojana nie zależy od obrotów wirnika, a warunek
ten jest spełniony dla silnika obcowzbudnego, to:
obrotowy silnika jest największy, gdy silnik nie obraca się i maleje wraz ze wzrostem obrotów,
od momentu obciążającego silnik, ale przy małej rezystancji wirnika zależność ta jest niewielka i silni
od biegu luzem do obciążenia znamionowego,
onego zależą od wielkości indukcji magnetycznej B (im większa indukcja, tym mniejsze obroty biegu
obrotowej
U, • przez zmianę rezystancji w obwodzie twornika Rar, • przez zmianę
ą
d płynący przez cewkę nigdy nie
d zmagazynowany w cewce zostanie rozładowany, co
ś
ci średniej napięcia wyjściowego można uzyskać
czenia klucza wyznaczający
= const), natomiast
rednia napięcia
kluczowania jest stała (1/T
i
= const), natomiast czas
rednia napięcia wyjściowego można
cej odbiorniki o charakterze nieliniowym . Główną tego przyczyną są
ą
nieliniowe . Najważniejsze oddziaływania
du obciążenia I
d
nie występuje we
prostownika tyrystorowego jest moc bierna podstawowej harmonicznej, obciążająca źródło i
ę
cia wyprostowanego. Osiąga ona dla
a system energetyczny, co jest związane z
du odbiornika od jednego zaworu przez zawór
ci kolejnych faz rozróżnia się:
jest wtedy wielokrotnie większa niż warto
ż
nica chwilowych wartości napięć
ci obrotowej na przykładzie silnika
i maleje wraz ze wzrostem obrotów,
ż
ść
ta jest niewielka i silnik ma
ksza indukcja, tym mniejsze obroty biegu
• przez zmianę strumienia
Wykorzystywane w praktyce, a różnią się pod wzgl
• zakresu regulacji, • kierunku regulacji (góra, dół),• ekonomicznym
Regulację prędkości obrotowej przez zmian
napięcia. Zmieniając napięcie zasilające twornik
od prędkości znamionowej – w całym zakresie regulacji pr
Prowadząc regulację prędkości przez zmian
zaniku prądu w obwodzie wzbudzenia silnika.
obwodem twornika (silniki bocznikowe i szeregowe).
odpowiadającej pracy na charakterystyce naturalnej (od pr
regulacyjnym.
Własności regulacyjne silników elektrycznych.
Schemat ręcznie pisany.
Układy napędowe z silnikami o magnesach trwałych
Silniki z magnesami trwałymi, wśród których mo
• silniki synchroniczne z magnesami trwałymi (PMSM),
• bez szczotkowe silniki prądu stałego (BLDC).
Podział ten wiąże się ściśle z ich konstrukcją gdy
synchroniczne, natomiast maszyny o trapezoidalnym
stosowane są w: urządzeniach komputerowych, sprz
powyżej 1 kW, znajdują zastosowanie w przemy
popularności silników BLDC związany jest z wieloma zaletami tego typu maszyn, do których mo
• prostą budowę silnika, • duży stosunek momentu do masy silnika, • du
• sterowanie w szerokim zakresie prędkości, • bardzo dokładn
moment rozruchowy, • niskie koszty obsługi, • brak szczotek.
Do najczęściej wymienianych wad tego silnika nale
konieczność stosowania czujników położenia wału, co w znacznym stopni wpływa na cen
STEROWANIE SILNIKIEM BLDC
Do zasilania bez szczotkowych silników prądu stałego stosowane s
Położenie wału silnika:
• pomiar prędkości lub położenia wirnika za pomoc
• wyliczenie prędkości przez układ sterujący wykorzystuj
• wyznaczanie położenia wirnika poprzez pomiar odpowiednich wielko
Praca prostownikowa – przebiegi
Praca prostownika wymaga dostępnego przewodu neutralnego. Mo
Ponadto przez przewód neutralny będzie przepływał pr
tyrystorów, mierzony od punktu naturalnej komutacji (przeci
(beta ß) - kąt wyprzedzenia wysterowania tyrystorów, stosowany przy rozpatrywaniu pracy falownikowej. Impulsy bramkowe przesuni
są wzajemnie o kąt
. Przewodzenie ciągłe (ci
Kąt alfa może przyjmować wartość równą zero
równy zero, musi być większy. Spowodowane jest to sko
Praca falownikowa
Przekształtnik może przejść w stan pracy falownikowej, gdy po stronie odbioru znajdzie si
kierunkiem przepływu prądu wyprostowanego (np. podczas hamowania silnika mo
znaku, nie ma takiej możliwości tyrystory przewodz
kąt wysterowania beta musi być większy od 90°
Również, jak wcześniej wspomniałem, zanik impulsów bramkowych powoduje przewrót falownika.
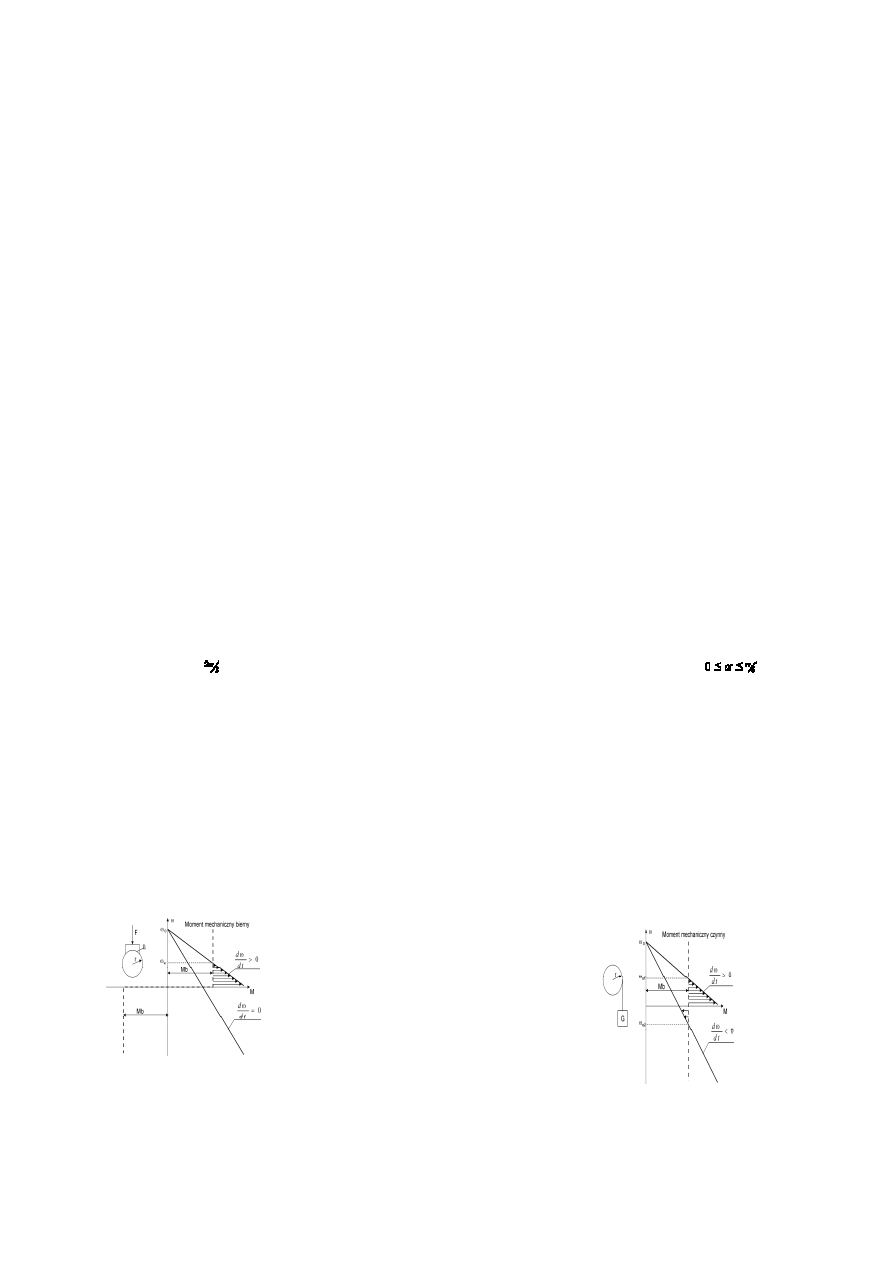
Pojęcia podstawowe napędu (mom
moment bezwładności, równanie dynamiki nap
Z punktu widzenia analizy układów napędowych istotny jest podział oporowych momentów mechanicznych na:
Do grupy momentów biernych zaliczamy te, które
oporowymi nie mogącymi nadać układowi przyspieszenia od zerowej pr
magazynami energii potencjalnej, takich jak cięż
przyspieszenie jeśli Mb>Me.
r – tarczy hamulca; F
µ
- współczynnik tarcia;
Moment bierny
r – promień
Moment czynny
Ustalony punkt pracy
W zakresie pracy silnikowej można wyróżnić
1) Stabilny – od prędkości dla której silnik osią
2) Niestabilny – od prędkości zerowej do prędko
ą
ę
pod względem:
• kierunku regulacji (góra, dół),• ekonomicznym
ci obrotowej przez zmianę napięcia twornika można uzyskać przez zastosowanie tyrystorowych
ą
ce twornika można przy znamionowym obciążeniu regulować prędkość od zera do warto
w całym zakresie regulacji prąd twornika nie zmienia wartości i zależy tylko od obciąż
ci przez zmianę strumienia, nie należy nadmiernie osłabiać pola magnetycznego oraz powodowa
zie wzbudzenia silnika. Regulacja szeregowa polega na włączeniu rezystancji regulacyjnej
obwodem twornika (silniki bocznikowe i szeregowe). W tym przypadku mamy możliwość regulacji w dół – poniż
charakterystyce naturalnej (od prędkości znamionowej do zera). Regulacja nieekonomiczna
ci regulacyjne silników elektrycznych.
dowe z silnikami o magnesach trwałych
ród których można wyróżnić:
• silniki synchroniczne z magnesami trwałymi (PMSM),
du stałego (BLDC).
le z ich konstrukcją gdyż silniki o sinusoidalnym rozkładzie pola są najczęściej sterowane jako silniki
trapezoidalnym rozkładzie pola jako silniki prądu stałego. Silniki bez szczotkowe pr
dzeniach komputerowych, sprzęcie medycznym, biurowym, w sprzęcie gospodarstwa domowego . Silniki o mocy
zastosowanie w przemyśle, a także w różnego typach napędów pojazdów elektrycznych. Znaczny wzrost
zany jest z wieloma zaletami tego typu maszyn, do których możemy zaliczyć:
y stosunek momentu do masy silnika, • dużą sprawność, • prosty układ sterowania,
ę
ś
ci, • bardzo dokładną regulację prędkości bez dodatkowych kosztów finansowych, • wyso
skie koszty obsługi, • brak szczotek.
ciej wymienianych wad tego silnika należą: tętnienia momentu elektromagnetycznego, wysoki koszt magnesów trwałych o
ż
enia wału, co w znacznym stopni wpływa na cenę układu napędowego.
ą
du stałego stosowane są przekształtniki częstotliwości o strukturze falownika pr
enia wirnika za pomocą czujnika,
ą
cy wykorzystujący do tego model matematyczny danej maszyny,
enia wirnika poprzez pomiar odpowiednich wielkości (np. siły elektromotorycznej).
przebiegi
pnego przewodu neutralnego. Może on być zasilany poprzez dławiki sieciowe lub bezpo
ę
dzie przepływał prąd stały, co nie zawsze jest dopuszczalne. (alfa) - kąt opóź
tyrystorów, mierzony od punktu naturalnej komutacji (przecięcie się sinusoidalnych przebiegów napięć, zasilających prostownik);
t wyprzedzenia wysterowania tyrystorów, stosowany przy rozpatrywaniu pracy falownikowej. Impulsy bramkowe przesuni
ą
głe (ciągły prąd) odbiornika czysto rezystancyjnego występuje w zakresie k
ą
zero - wtedy prostownik pracuje jak układ niesterowany (diody). Natomias
kszy. Spowodowane jest to skończonym czasem wyłączania tyrystora.
w stan pracy falownikowej, gdy po stronie odbioru znajdzie się źródło napięcia stałego skierowane
du wyprostowanego (np. podczas hamowania silnika może nastąpić zwrot energii do sieci
ci tyrystory przewodzą w jednym kierunku). Wartość średnia napięcia wyprostowanego jest ujemna. St
ę
kszy od 90° - . Aby nie nastąpił przewrót falownikowy opisany wcześniej musi by
niej wspomniałem, zanik impulsów bramkowych powoduje przewrót falownika.
cia podstawowe napędu (moment czynny, bierny, punkt pracy stabilnej,
ś
ci, równanie dynamiki napędu)
ę
dowych istotny jest podział oporowych momentów mechanicznych na:
Do grupy momentów biernych zaliczamy te, które pojawiają się zawsze przy prędkościach różnych od zera i są zawsze momentami
układowi przyspieszenia od zerowej prędkości. Momenty czynne występują w mechanizmach z
magazynami energii potencjalnej, takich jak ciężar na pochyłości lub ciężar zawieszony na linie. Momenty te mogą
tarczy hamulca; F – siła docisku szczęk hamulca;
współczynnik tarcia;
Moment bierny: Mb = (F
µ
r) sign(
ω
) [Nm]
promień bębna linowego; G – ciężar zawieszony na linie;
Moment czynny: Mb = G r [Nm]
ć
dwie części charakterystyki:
osiąga moment krytyczny Mk do prędkości synchronicznej.
prędkości w której silnik osiąga moment krytyczny.
przez zastosowanie tyrystorowych regulatorów
ę
ść
od zera do wartości większej
y tylko od obciążenia.
pola magnetycznego oraz powodować
czeniu rezystancji regulacyjnej Rar w szereg z
poniżej prędkości
Regulacja nieekonomiczna – straty na rezystorze
sterowane jako silniki
du stałego. Silniki bez szczotkowe prądu stałego
owego . Silniki o mocy
dów pojazdów elektrycznych. Znaczny wzrost
ć
:
, • prosty układ sterowania,
ci bez dodatkowych kosztów finansowych, • wysoki
tnienia momentu elektromagnetycznego, wysoki koszt magnesów trwałych oraz
ę
dowego.
ci o strukturze falownika prądu lub napięcia.
zasilany poprzez dławiki sieciowe lub bezpośrednio z linii.
ą
t opóźnienia wysterowania
ęć
, zasilających prostownik);
t wyprzedzenia wysterowania tyrystorów, stosowany przy rozpatrywaniu pracy falownikowej. Impulsy bramkowe przesunięte
puje w zakresie kątów
.
wtedy prostownik pracuje jak układ niesterowany (diody). Natomiast kąt beta nie może być
ę
cia stałego skierowanego zgodnie z
zwrot energii do sieci - prąd nie zmienia
cia wyprostowanego jest ujemna. Stąd też
niej musi być spełniony warunek.
ent czynny, bierny, punkt pracy stabilnej,
bierne i czynne.
ą
zawsze momentami
ę
ą
w mechanizmach z
ar zawieszony na linie. Momenty te mogą nadać układowi

Ustalony punkt pracy (punkt zrównania sie momentu obciążenia Mo z momentem rozwijanym przez silnik) musi znajdować sie na stabilnej
części charakterystyki poniżej znamionowego punktu pracy. Równowaga momentów obciążenia i silnika w każdym innym punkcie
powoduje przekroczenie wartości znamionowej prądu silnika co grozi jego przegrzaniem i uszkodzeniem izolacji.
Moment bezwładności brył obrotowych
Moment bezwładności J ciała wirującego wokół osi możemy obliczyć według zależności znanej z fizyki:
∑
Obliczanie J jako sumy iloczynów elementarnych cząsteczek ciała i kwadratów odległości tych cząstek od osi obrotu jest uciążliwe.
Z tego powodu J bryły obrotowej obliczamy z zależności:
gdzie: m – całkowita masa bryły [kg] Rb – promień bezwładności masy [m]
W katalogach maszyn często podawany jest moment zamachowy oznaczany GD
2
, którego jednostką jest kGm
2
. J=GD
2
/4
Równania dynami maszyny prądu stałego w jednostkach względnych
Jako podstawę analizy przyjmijmy równania obwodu twornika U
t
=(R
t
+R
d
)i
i
+e
t
+L
t
(di
t
/dt)
Obwodu wzbudzenia U
w
=(R
w
+R
wd
)i
w
+L
w
(di
w
/dt)
Wartość siły elektromotorycznej wynikającej z obrotu wirnika e
t
=kωΦ
Wyszukiwarka
Podobne podstrony:
opracowanie pytan id 338374 Nieznany
Nhip opracowanie pytan id 31802 Nieznany
Opracowanie pytan 3 id 338376 Nieznany
opracowania Ekologia id 794643 Nieznany
Opracowanie Hoffmanna id 338261 Nieznany
opracowanie antropologia id 338 Nieznany
Opracowanie Metrologia 2 id 338 Nieznany
opracowanko histogram id 338711 Nieznany
opracowanie ak id 338118 Nieznany
Opracowanie klp id 338270 Nieznany
Opracowanie seminaria id 338435 Nieznany
dod opracowanie wynikow id 1386 Nieznany
opracowanie cw5 id 338131 Nieznany
OpracowanieUOOPby wpiana7 id 33 Nieznany
OPRACOWANE ODPOWIEDZI id 337615 Nieznany
MOJE OPRACOWANIE wersja C id 30 Nieznany
Opracowanie pytan 5 id 338378 Nieznany
opracowane pytania 2 id 337625 Nieznany
opracowanie metrologia id 33828 Nieznany
więcej podobnych podstron