W
W
stępna analiza konstrukcji z
stępna analiza konstrukcji z
obserwacjami nadliczbowymi
obserwacjami nadliczbowymi
Wyrównanie
Wstępna analiza
dane wyjściowe
X
P
– współrzędne przybliżone
L
obs
– wykonane obserwacje
m
L
- dokładność obserwacji
F - funkcja jaką mają spełniać
wyznaczone punkty
szukane
m
F
– błąd funkcji ; jego wartość jest
podstawą do oceny dokładności
zrealizowanej konstrukcji
pomiarowej
dane wyjściowe
X
P
– współrzędne projektowane
L
obs
– projektowane obserwacje
F - funkcja jaką mają spełniać
wytyczone punkty
m
F
- dokładność z jaką funkcja ma być
spełniona ( wynika z analizy dokumentacji
projektowej)
m
L
– dokładność z jaką należy wykonać tyczenie
aby pożądaną funkcja została zrealizowana
z projektowaną dokładnością.
szukane
W
W
stępna analiza konstrukcji z
stępna analiza konstrukcji z
obserwacjami nadliczbowymi
obserwacjami nadliczbowymi
równania poprawek
ax + l = v
Równoważenie
m ; m
L
- błędy
obserwacji
p –waga obserwacji
kiedy, jak ?
1.Jeżeli sieć jest
niejednorodna
pod
względem typu obserwacji (np..sieć
kątowo- liniowa) to równoważymy za
pomocą błędów obserwacji wyrażonych
w takich jednostkach w jakich mamy
zapisane równania poprawek.
2.Jeżeli sieć jest
jednorodna
pod
względem typu obserwacji to można
równoważyć za pomocą wag
np. sieć niwelacyjna p= 1/n ; p= 1/L
sieć kątowa p= 1/s
sieć liniowa p= 1/D
są to wartości niemianowane ustalone
dla zdefiniowanej obserwacji typowej
(obserwacji o wadze p=1)
po zrównoważeniu
Ax + L = V
układ równań
normalnych
A
2
x + LA = 0
można obliczyć
- niewiadome x i stąd współrzędne wyrównane X
w
- poprawki do obserwacji V lub v
i na ich podstawie
m
0
= =
V V
n
n
pvv
n
n
średni błąd obserwacji typowej po wyrównaniu
WYRÓWNANIE- PRZYPOMNIENIE
W
W
stępna analiza konstrukcji z
stępna analiza konstrukcji z
obserwacjami nadliczbowymi
obserwacjami nadliczbowymi
właściwości m
0
– globalny wskaźnik zgodności
wykonanych obserwacji z przyjętym modelem
matematycznym wyrównania
sieć niejednorodna pod względem typu obserwacji
- m
0
jest wielkością niemianowaną
- obserwacja, której dotyczy (typowa) jest niezdefiniowana
- w poprawnie wyrównanej sieci błąd m
0
powinien być statystycznie równy 1
wartość różna od jedności świadczy o źle wykonanym wyrównaniu
( zbyt mała dokładność współrzędnych przybliżonych, błędy grube w obserwacjach,
błędy przyjęte do równoważenia inne niż faktycznie popełnione w trakcie pomiaru)
p=1/n ;obserwacją typową jest
różnica
wysokości pomierzona na
jednym stanowisku,
p=1/s ;obserwacja typową jest
kąt
pomierzony w jednej serii,
p=1/D ;obserwacją typową jest
odcinek
o długości D
sieć jednorodna pod względem typu obserwacji
-obserwacja typowa jest zdefiniowana
-m
0
jest wartością mianowaną i dotyczy obserwacji
typowej
-wartość m
0
różna od oczekiwanej świadczy o źle
wykonanym wyrównaniu
np
.
m
F
= m
0
f A
2 -1
f
W
W
stępna analiza konstrukcji z
stępna analiza konstrukcji z
obserwacjami nadliczbowymi
obserwacjami nadliczbowymi
f – krakowian funkcyjny
Dla kąta -
a
1
dx
L
+ b
1
dy
L
+ c
1
dx
P
+ d
1
dy
P
+
e
1
dx
C
+ f
1
dy
C
Dla długości –
a
2
dx
L
+ b
2
dy
L
+ c
2
dx
P
+ d
2
dy
P
Dla odchylenia punktu od prostej
a
1
dx
L
+ b
1
dy
L
+ c
1
dx
P
+ d
1
dy
P
+
e
1
dx
C
+ f
1
dy
C
Dla kierunku
a
1
dx
L
+ b
1
dy
L
+ c
1
dx
P
+ d
1
dy
P
Dla niewiadomej X a
1
dx
L
Dla niewiadomej Y b
1
dy
L
itd
Współczynniki przy
niewiadomych
w równaniach
obserwacyjnych
(poprawek) przed
zrównoważeniem

KROK I
-dla zaprojektowanych obserwacji, na podstawie projektowanych współrzędnych
układamy „częściowe” równania poprawek do projektowanych obserwacji
równanie poprawki dla obserwacji wykonanej-
a
i
x + l
i
= vi
-równanie „częściowe” poprawki dla obserwacji projektowanej-
a
i
-
są to tylko
współczynniki przy niewiadomych.
KROK II
- równoważenie równań współczynników-
A
i
-współczynniki przy niewiadomych dla różnego typu obserwacji są wyrażone w
różnych jednostkach a więc i jednym z celów równoważenia jest ujednolicenie
jednostek w jakich są wyrażone współczynniki
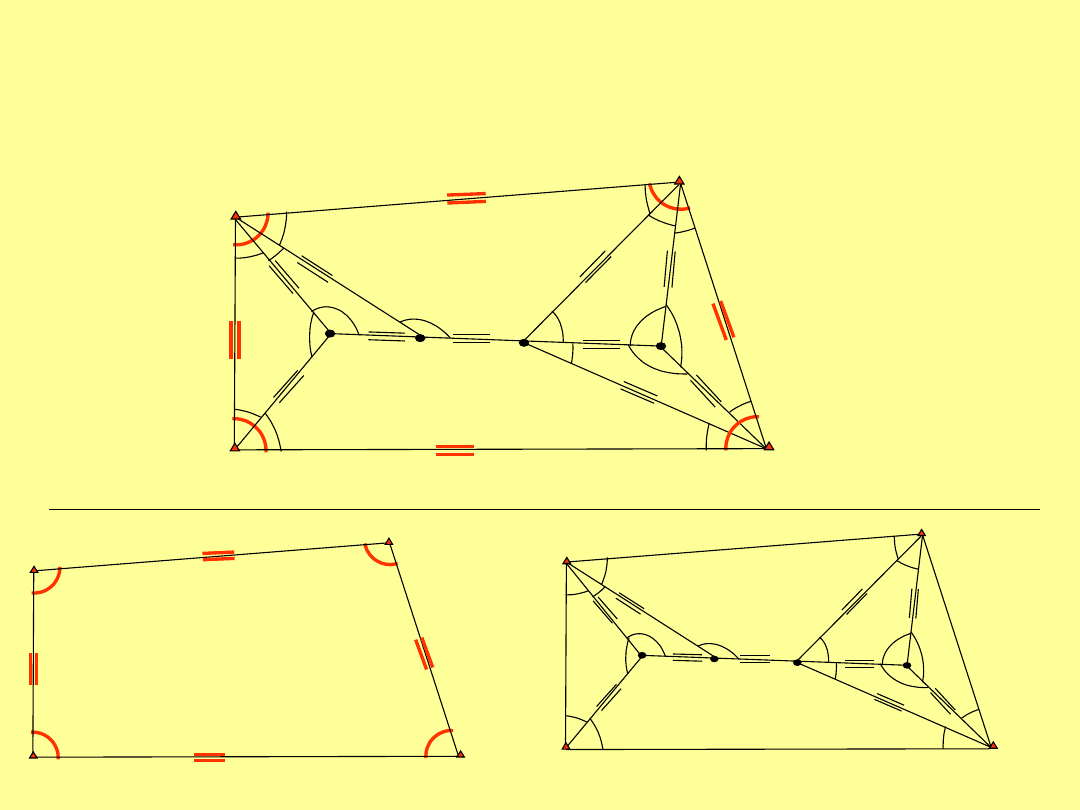
Projektowana konstrukcja tyczenia z
Projektowana konstrukcja tyczenia z
obs. nadliczbowymi
obs. nadliczbowymi
Projektowana konstrukcja tyczenia z
Projektowana konstrukcja tyczenia z
obs. nadliczbowymi
obs. nadliczbowymi
KROK III
-ułożenie tablicy wariancyjno - covariancyjnej
A
2 -1
KROK IV
- ułożenie współczynników krakowianu funkcyjnego
f
F
1
f
1
F
2
f
2
…………
F
n
f
n
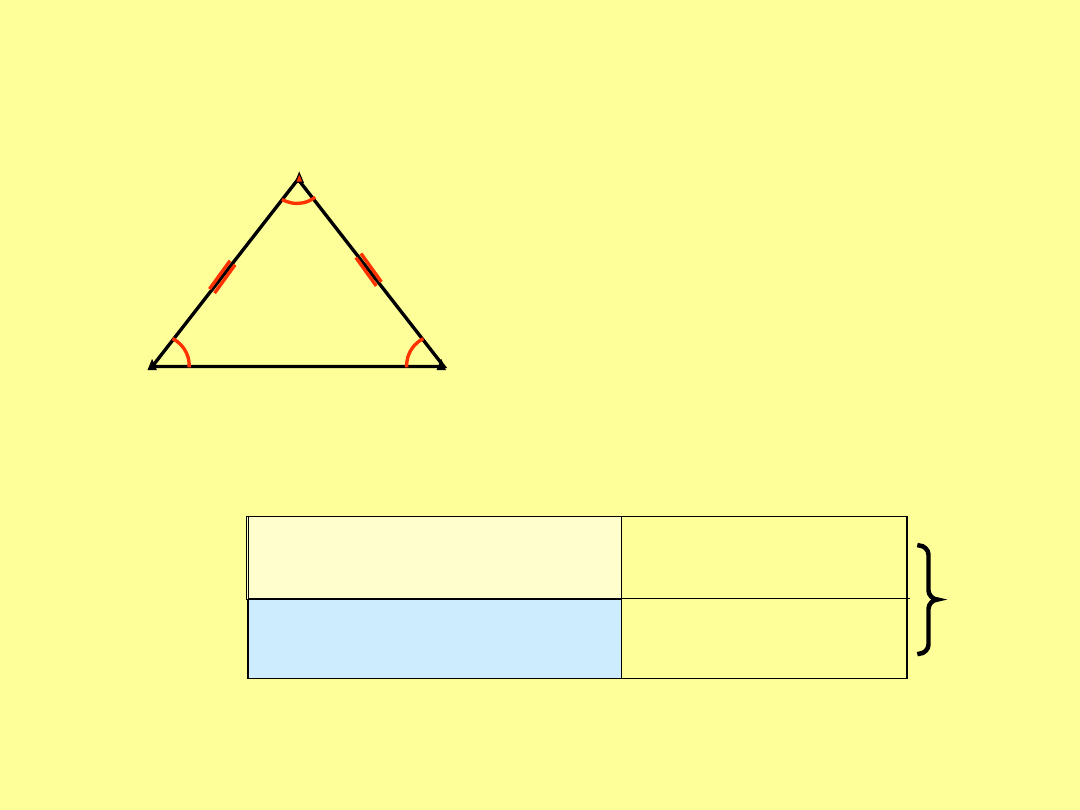
Od projektowanej konstrukcji tyczenia możemy oczekiwać
równoczesnego spełnienia wielu różnych warunków odnośnie
położenia tyczonych punktów jak i warunków geometrycznych
W
W
stępna analiza - obserwacje
stępna analiza - obserwacje
niejednorodne
niejednorodne
m
F
= m
0
f A
2 -1
f
Według tej zależności błąd funkcji współrzędnych liczymy
w przypadku wyrównywania sieci metodą pośredniczącą.
W tym wzorze tym w przypadku wstępnej analizy dokładności znamy
m
F
; f; A
2 -1
;
więc można napisać, że
m
0
=
m
F
f A
2 -1
f
= q
q
jest parametrem, który z racji sposobu jego obliczenia ma właściwości
błędu
m
0
,
W
W
stępna analiza - obserwacje
stępna analiza - obserwacje
niejednorodne
niejednorodne
Z tego wynika, że
1)Jeżeli uzyskamy
q=1
to znaczy, że
błędy obserwacji
przyjęte do
równoważenia układu
współczynników przy niewiadomych
są dokładnie takie jakie były
potrzebne
aby
konstrukcja tyczenia spełniała warunki wynikające z założonej funkcji
celu
2) Jeżeli uzyskamy
q< 1
to znaczy, że przyjęte
błędy obserwacji są większe od wymaganych,
aby konstrukcja tyczenia spełniała warunki wynikające z założonej funkcji celu
3) Jeżeli uzyskamy
q> 1
to znaczy, że przyjęte
błędy obserwacji są mniejsze od wymaganych
,
aby konstrukcja tyczenia spełniała warunki wynikające z założonej funkcji celu
Stąd:
m = q* m
’
m = q* m
’
md = q* md
’
ml = q* ml
’
Z taką dokładnością należy wykonać pomiar zaprojektowanych
obserwacji
W
W
stępna analiza - obserwacje niejednorodne
stępna analiza - obserwacje niejednorodne
Jeżeli konstrukcja tyczenia ma służyć do zrealizowania wielu różnych funkcji
otrzymamy
m
0
(1)
=
m
F1
f
1
A
2 -1
f
1
= q
1
m
0
(2)
=
m
F2
f
2
A
2 -1
f
2
= q
2
m
0
(n)
=
m
Fn
f
n
A
2 -1
f
n
= q
n
………………………
Tylko jednemu parametrowi
q
możemy przypisać
właściwości
błędu m
0
Z całego zbioru tych
parametrów
będzie to parametr
najmniejszy
m = q
min
* m
’
STĄD OGÓLNIE
1. Ułożenie współczynników równań poprawek dla projektowanych
obserwacji
2. Równoważenie
m’
=10
cc
;
20
cc
; 100
cc
ml’ = 1mm; 2mm; 10mm
m’
= 5
cc
;
10
cc
; 500
cc
ml’ = 5mm; 10mm; 500mm
ZADANIE
ZADANIE
B
A
P
Z jaką dokładnością wykonać
pomiar, aby punkt
P
znajdował się
w wyznaczonej pozycji względem
punktów
A
i
B
.
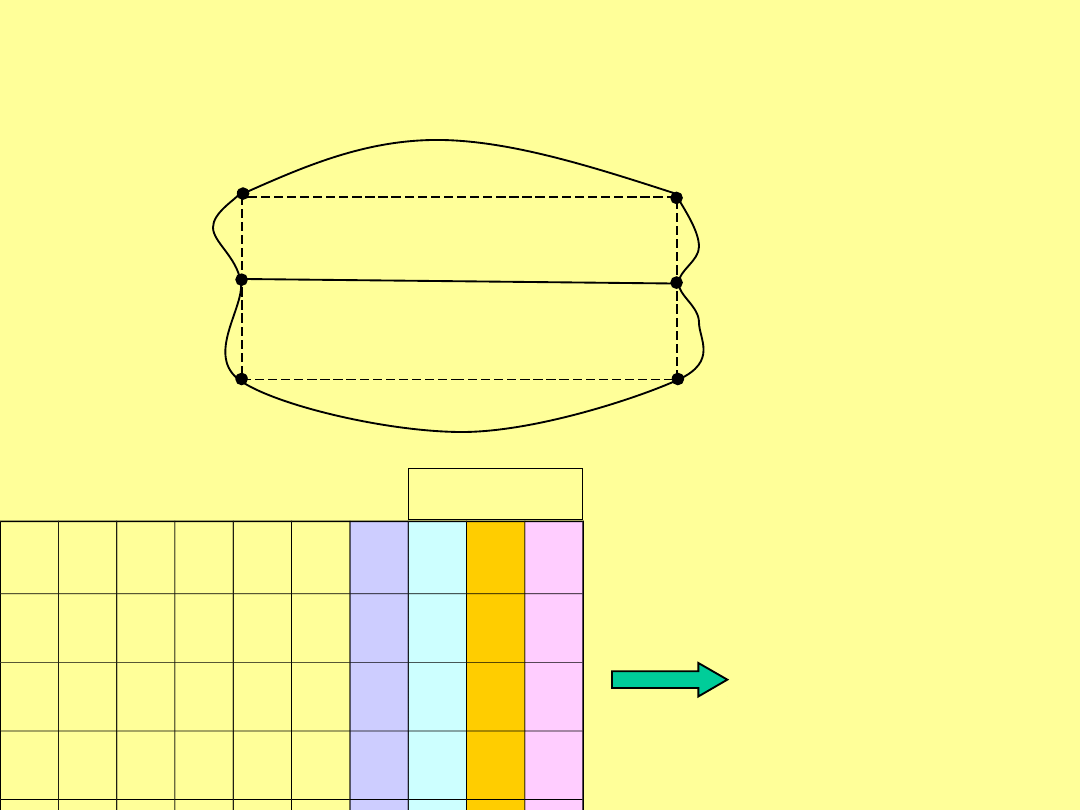
każda z tych par da
jednakowy wynik
każda z tych par da
jednakowy wynik
a
le
w
y
n
ik
i
b
ę
d
ą
r
ó
żn
e
3 Funkcja celu – wyznaczenie pozycji, czyli
X
m
x
oraz
Y
m
y
czyli dwie funkcje, które
muszą być zrealizowane
równocześnie
4
Krakowiany funkcyjne
5
Obliczenie wartości m
0
ZADANIE – c.d.
ZADANIE – c.d.
f
1
= 1
0
f
2
= 0
1
m
x
m
0
(1)
=
f
1
{ A
2
}
-1
f
1
= q
1
m
y
m
0
(2)
=
f
2
{ A
2
}
-1
f
2
= q
2
m
= q
min
m
‘
m
l
= q
min
m
l
’
n
n
r
1 5,6
2 4,9
.............
..
10 4,0
30 3,7
.............
..
3,3
W=0,999
PRZYKŁAD- 1
PRZYKŁAD- 1
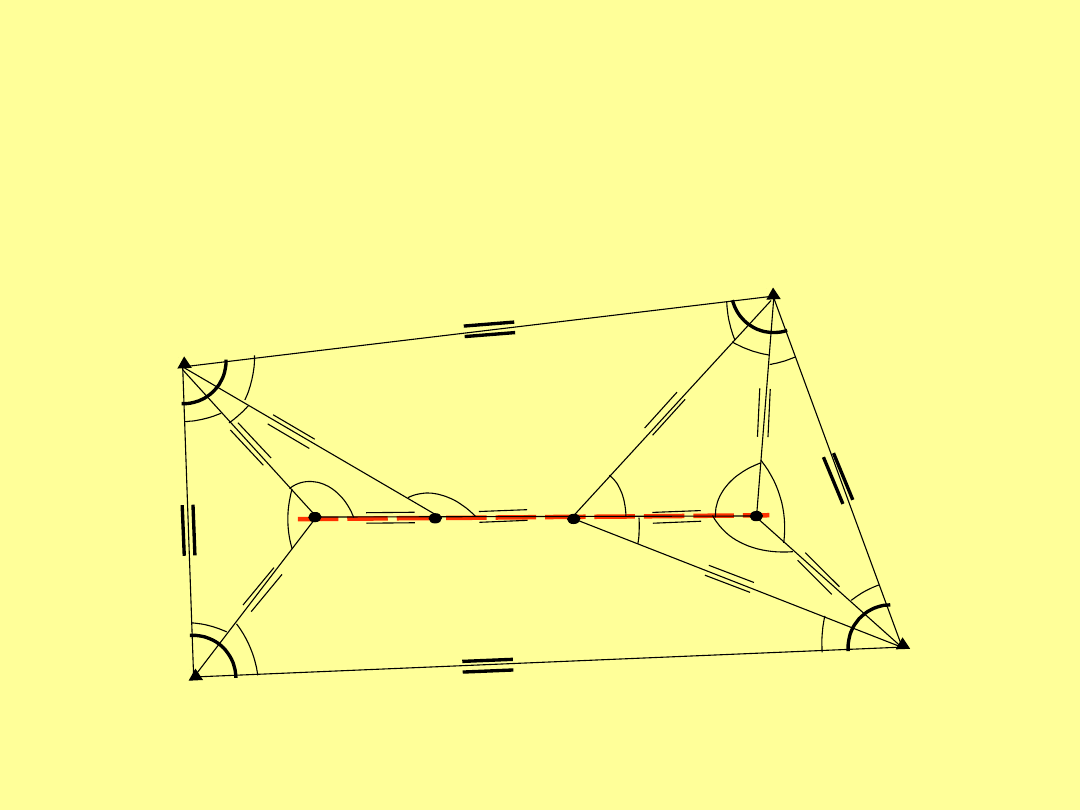
Konstrukcja tyczenia pokazana na rysunku ma posłużyć do
wytyczenia osi obiektu. Z jaką dokładnością wykonać pomiar aby
punkty osi spełniały określone warunki projektowe?
Projektowana konstrukcja tyczenia z
Projektowana konstrukcja tyczenia z
obs. nadliczbowymi
obs. nadliczbowymi
kąty
1. a
i
2. b
i
3. c
i
……..
długośc
i
4. d
i
5. e
i
6. f
i
……..
m
’
m
’
m
d
’
m
l
’
kąty
1. A
i
2. B
i
3. C
i
……..
długośc
i
4. D
i
5. E
i
6. F
i
……..
Przyjęte do równoważenia wartości
błędów
obserwacji powinny spełniać warunki
wynikające z:
- wymagań formalnych zadania,
- doświadczenia wykonawcy,
- możliwości sprzętu jakim będziemy
dysponować,
- geometrii obiektu,
- itp..
Nie ma potrzeby zakładania, że wszystkie
obserwacje tego samego typu będą
wykonywane
z tą samą dokładnością.
PRZYKŁAD- 2
PRZYKŁAD- 2
I etap
II etap
Zadanie jak w przykładzie pierwszym
W
W
stępna analiza - obserwacje
stępna analiza - obserwacje
jednorodne
jednorodne
m
0
- jest to przeciętny średni błąd obserwacji typowej po wyrównaniu,
- jest to wartość mianowana przypisana do konkretnej wielkości geometrycznej
zdefiniowanej jako obserwacja typowa w procesie ustalania wag obserwacji
p=1/n ;obserwacją typową jest
różnica
wysokości pomierzona na
jednym stanowisku,
p=1/s ;obserwacja typową jest
kąt
pomierzony w jednej serii,
p=1/D ;obserwacją typową jest
odcinek
o długości D
Sieć niwelacyjna
Sieć kątowa
Sieć liniowa
W
W
stępna analiza - obserwacje
stępna analiza - obserwacje
jednorodne (przykład)
jednorodne (przykład)
Rp3
Rp4
Rp5
Rp6
Rp1
Rp2
(1
)
(2
)
(3
)
(4
)
(5
)
(6
)
dh
2
dh
3
dh
4
dh
5
dh
6
n
p’
p’’ p’’
’
(1
)
1
1
1
4
2
(2
)
-1
1
1
1
4
2
(3
)
-1
1
2
1/
2
2
1
(4
)
-1
1
1
1
4
2
(5
)
-1
1
1
1
4
2
(6
)
-1
4
1/
4
1
1/
2
Obserwację typową (o wadze p= 1)
możemy zdefiniować w zasadzie
dowolnie
{A
2
}
-1
m
H
m
H
m
H
dh
1
=0
wagowanie
W
W
stępna analiza - obserwacje
stępna analiza - obserwacje
jednorodne
jednorodne
F
1
H
6
– H
1
m
F1
= m
H
F
2
H
5
– H
2
m
F2
= m
H
F
3
H
4
– H
3
m
F3
= m
H
Osnowa została założona w celu realizacji następujących funkcji
Z jaką dokładnością należy wykonać niwelację aby funkcje były
zrealizowane z wymaganą dokładnością?
Oczekiwaną wartość m
0
można
oszacować
na podstawie twierdzenia
Otrębskiego
f
2
=
0
-1
0
1
0
f
1
=
0
0
0
0
1
f
3
=
0
-1
1
0
0
W
W
stępna analiza - obserwacje
stępna analiza - obserwacje
jednorodne
jednorodne
m
F1
= m
0
f
1
{A
2
}
-1
f
1
m
F1
= m
0
f
3
{A
2
}
-1
f
3
m
F2
= m
0
f
2
{A
2
}
-1
f
2
Oczekiwaną wartość m
0
można
oszacować
na podstawie twierdzenia
Otrębskiego
m
0
(2)
=
m
H
f
2
{A
2
}
-
1
f
2
= q
2
m
0
(1)
=
m
H
f
1
{A
2
}
-
1
f
1
= q
1
m
0
(3)
=
m
H
f
3
{A
2
}
-
1
f
3
= q
3
Tylko jednemu parametrowi q możemy przypisać
właściwości błędu m
0.
Z całego zbioru tych
parametrów będzie to parametr najmniejszy
W
W
stępna analiza - obserwacje
stępna analiza - obserwacje
jednorodne
jednorodne
q
min
= przeciętny błąd średni obserwacji typowej po wyrównaniu
Z jaką dokładnością należy pomierzyć obserwację typową,
aby po wyrównaniu sieci uzyskać m
0
= q
min
TWIERDZENIE OTRĘBSKIEGO
m
0
2
r
m
h
2
n
m
h
= m
0
n
r
Wymagana dokładność pomiaru
ZADANIE
ZADANIE
1
2
3
4
5
P
Punkt P może być wyznaczony z wcięcia wstecz w oparciu o punkty 1; 2; 3; 5;
lub 1; 2; 4; 5. Które rozwiązanie jest korzystniejsze?
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
Wyszukiwarka
Podobne podstrony:
VII wykład
VII WYKLAD 1
TRANSPORT KOPALNIANY VII wykład
Podstawy ergonomii, WYKŁAD VII, WYKŁAD VII
GIS wykłady VII wykład
wykłady Czapli Fizjologia człowieka (VII wyklad, 7 04 2011 r )
Fizjologia człowieka (VII wyklad, 7 04 2011 r )
wykady pozyt, Wykład VII, Wykład VII
biofiz, Wykład VII, Wykład VII
VII WYKLAD 3
VII wyklad 28 11 2
VII WYKLAD 1
WYKŁAD VII
Wykład VII hazard, realizacja na NAND i NOR
Wykład VII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
wykład VII, LEŚNICTWO SGGW, MATERIAŁY LEŚNICTWO SGGW, Transport, TRANSPORT
Wykład VII, Studia Biologia, Mikrobiologia, wykłady z ogólnej
(Wykład VII)id 1478
3-7.12.09, Studia, IV rok, IV rok, VII semestr, Waloryzacja przyrodnicza, wyklady cwiczenia w word
więcej podobnych podstron