
GIP
Rok ak.2004/05
sem. VII studia inżynierskie
Wykładowca-
Dr inż. Ryszard Kowalski
Strona tytułowa
Zakład Geodezji Inżynieryjno-Przemysłowej
Kierownik Zakładu: Prof. dr hab. Witold Prószyński
Gmach Główny pok. 4o3A, tel. (022) 234 7287
Wykład-
GEODEZJA INŻYNIERYJNO-
PRZEMYSŁOWA
Wykładowca-
Rok ak.2005/06
Głównym Pok.302 w Gmachu tel.(22) 234 7299
-Wykład kończy się zaliczeniem po VII semestrze
-termin zaliczenia- na ostatnim wykładzie
-w systemie punktowym przedmiot jest oceniony na 5 punktów
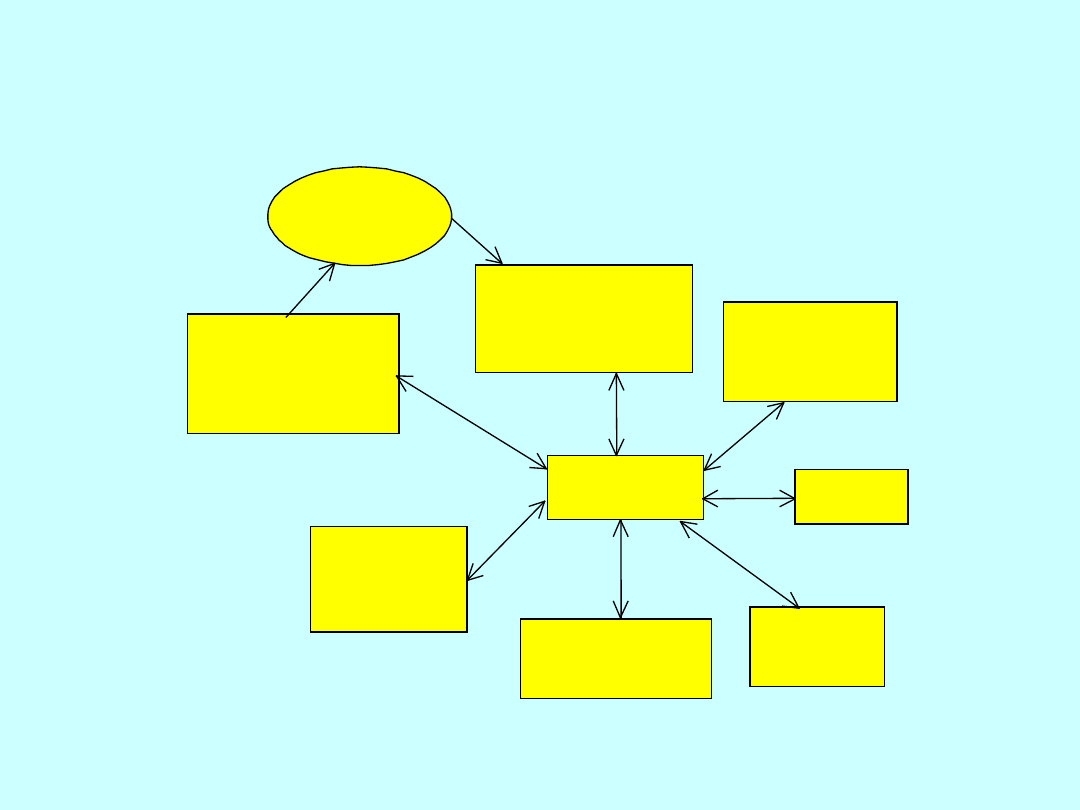
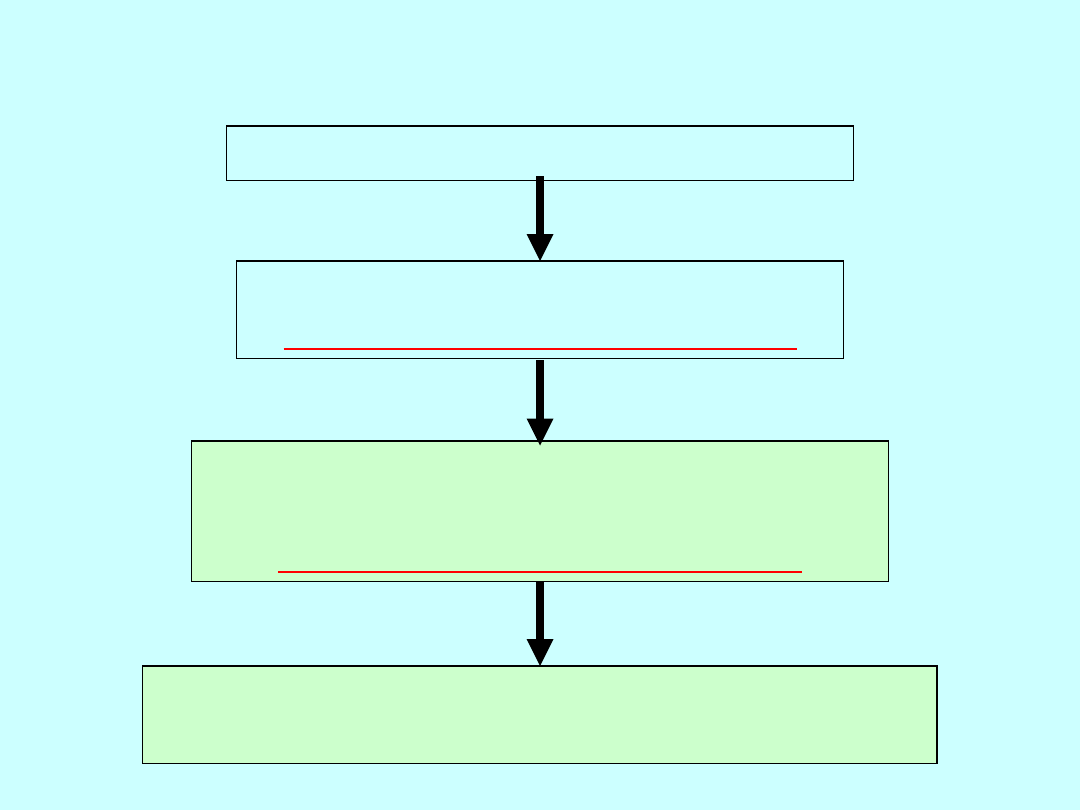
Wykłady z GIP-u sem VI
OBIEKT
Prace geodezyjne na
etapie studiów
projektowych
Prace geodezyjne na
etapie projektu
szczegółowego
Geodezyjne
opracowanie
projektu
Tyczenie
Pomiary
kontrolne
Inwentaryzacja
powykonawcza
Pomiary w
trakcie
eksploatacji
Pozyskanie
terenu
Wykłady z GIP-u sem VI
1.Zasady projektowania osnów realizacyjnych
2.Tyczenie lokalizacyjne obiektów budowlanych
3.Tyczenie szczegółowe obiektów budowlanych
4.Pomiary kontrolne
- w trakcie realizacji inwestycji
-po zakończeniu budowy,
-w trakcie eksploatacji
5.Ocena wymaganej dokładności realizacji inwestycji
6.Ocena dokładności różnych metod tyczenia
Nawiązanie do
Program wykładów
1.wstępna analiza dokładności konstrukcji tyczenia
1.1 tyczenia bez obserwacji nadliczbowych
1.2 tyczenie z obserwacjami nadliczbowymi
-obserwacje jednorodne
-obserwacje niejednorodne
1.3 wpływ warunków zewnętrznych na wynik
pomiaru
2. terenowe procedury oceny dokładności
instrumentów geodezyjnych
3. niezawodność sieci geodezyjnych
4.prace geodezyjne związane z realizacją tras
komunikacyjnych
prowadzący zajęcia
-dr inż.Waldemar Odziemczyk
-mgr inż.Zdzisław Michalski
-mgr inż.Sławomir Jastrzębski
-mgr inż.Piotr Kościk
Ćwiczenia projektowe
1.Geodezyjne opracowanie projektu węzła drogowego
2.Wstępna analiza dokładności
Literatura
1. Dobry podręcznik z rachunku wyrównawczego
2. Geodezja inżynieryjna PPWK W-wa wydanie drugie tomy I, II,III
3. Obsługa geodezyjna budowli i konstrukcji-Wojciech Janusz- PPWK-
1975
4. Podręcznik z geodezji II
5. Polska norma – ISO 17123
Optyka i instrumenty optyczne. Terenowe procedury testowania instrumentów
geodezyjnych i pomiarowych
Część 1:Teoria PN-ISO 17123-1
Część 2:Niwelatory PN-ISO 17123-2
Część 3:Teodolity PN-ISO 17123-3
Część 4:Dalmierze elektrooptyczne PN-ISO 17123-4
6. Ustawa z dn.21.VIII.1997- o drogach publicznych (dz. Ustaw nr. 71)
-Rozporządzenie MT i GM z dn. 02.III. 99 w sprawie warunków technicznych, jakim powinny
odpowiadać drogi publiczne i ich usytuowanie
- Rozporządzenie MT i GM z dn. 10.IX 98 w sprawie warunków technicznych, jakim powinny
odpowiadać drogowe warunki inżynierskie i ich usytuowanie
- Rozporządzenie Mi z dn. 16.II 05 w sprawie sposobu numeracji i ewidencji dróg
publicznych......
7.Ogólne specyfikacje GDDP –GG-oo.11.01 „Wykonanie mapy dla celów projektowania dróg”
Pomiarowe zadanie
realizacyjne
Inżynierskie zadanie realizacyjne
Pomiarowe zadanie realizacyjne
Wymagania dokładnościowe
Projektowanie sposobu rozwiązania
pomiarowego zadania realizacyjnego
Wstępna analiza dokładności
Zalecenia wykonawcze
Metody i dokładności pomiarów i wytyczeń
Dokładność tyczenia (
sem. VI
)
5
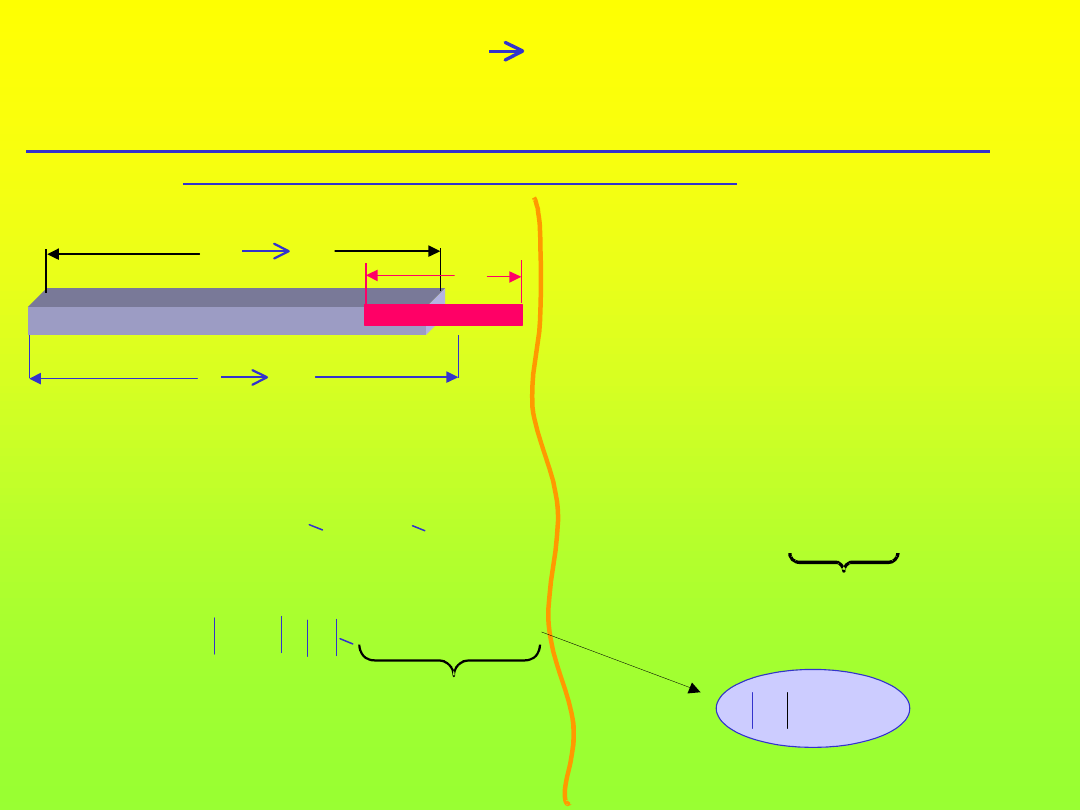
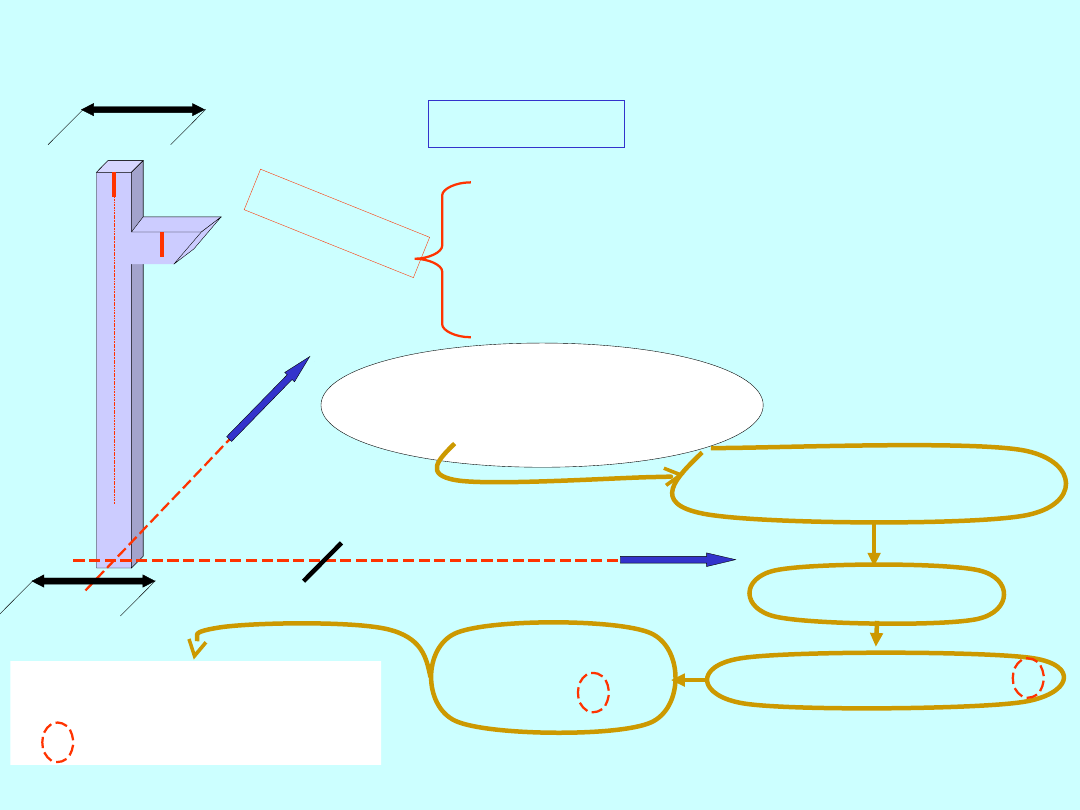
Oś a
Oś b
GRANICA DZIAŁKI
BUDYNEK Z OKNEM
min. 3m.
m
l
, m- nie musi oznaczać dokładności w znaczeniu geodezyjnym
6
I. Wymiar tolerowany symetrycznie
N T
w
N -projektowany wymiar elementu konstrukcji
T
w
-tolerancja wymiaru
dR
gr
-odchyłka graniczna
R
– rzeczywisty (prawdziwy) wymiar elementu
jeżeli będzie spełniony
warunek,że
N-dR
gr
<
R
< N+dR
gr
to wymiar elementu jest zgodny z
projektem
N
T
w
=2dR
+dR
g
R
-dR
d
dR
gr
=
T
w
2
dR
d
=dR
g
=
dR
r
=
R
-
N
Musi być spełniony warunek
dR
r
< dR
gr
(
Należy pamiętać, że
R
jest wielkością nieznaną. Możemy znać tylko wynik pomiaru l)
Tolerancja wymiaru (1)
8
Tolerancja wymiaru dokładność pomiaru
(1)
zadanie I – z jaką dokładnością wytyczyć projektowany wymiar N aby spełniał
warunki tolerancji wymiaru T
w
?
Można przyjąć, że (dopuszczalna odchyłka) = (błąd graniczny)
dR = M
g
m
N
= = =
M
g
dR
gr
T
w
3 3 6
Odp. – projektowany wymiar N należy wytyczyć z dokładnością m
N
Dla wymiaru tolerowanego niesymetrycznie
Odp. – należy wytyczyć wymiar N’ z dokładnością m
N
=
T
w
6
9
Tolerancja wymiaru dokładność pomiaru
(2)
Zadanie II. – jaki wynik pomiaru elementu konstrukcji będzie potwierdzał, że jego
rzeczywisty wymiar spełnia wymogi tolerancji?
dl = l - N
(ocena wyniku pomiaru kontrolnego)
N
T
w
l m
l
T
w
N – dR
d
< l + r*m
l
< N + dR
g
J eżeli założymy, że dR
d
= dR
g
= dR= T
w
/ 2
to otrzymamy l – N = dl < dR – r*m
l
=dP
dl < dP
dP – dopuszczalna
odchyłka
wyniku pomiaru
Dla wymiaru tolerowanego
niesymetrycznie otrzymamy
(wg. przyjętych oznaczeń)
dl = l – N’ < dR’ –r*m
l
dP
Tx
Tx
Tn
N
Tz
Ty
Tx
Ty
Tz
Ty
Tolerancja kształtu (1)
I.
II.
Tyczenie szczegółowe
O
1
O
2
a
a
b
3
b
2
b
4
b
5
b
6
b
7
d
d
b
9
b
1
D
0
,0
D-dd <? jaki wynik pomiaru kontrolnego
będzie świadczył o poprawności
tyczenia
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
szablon
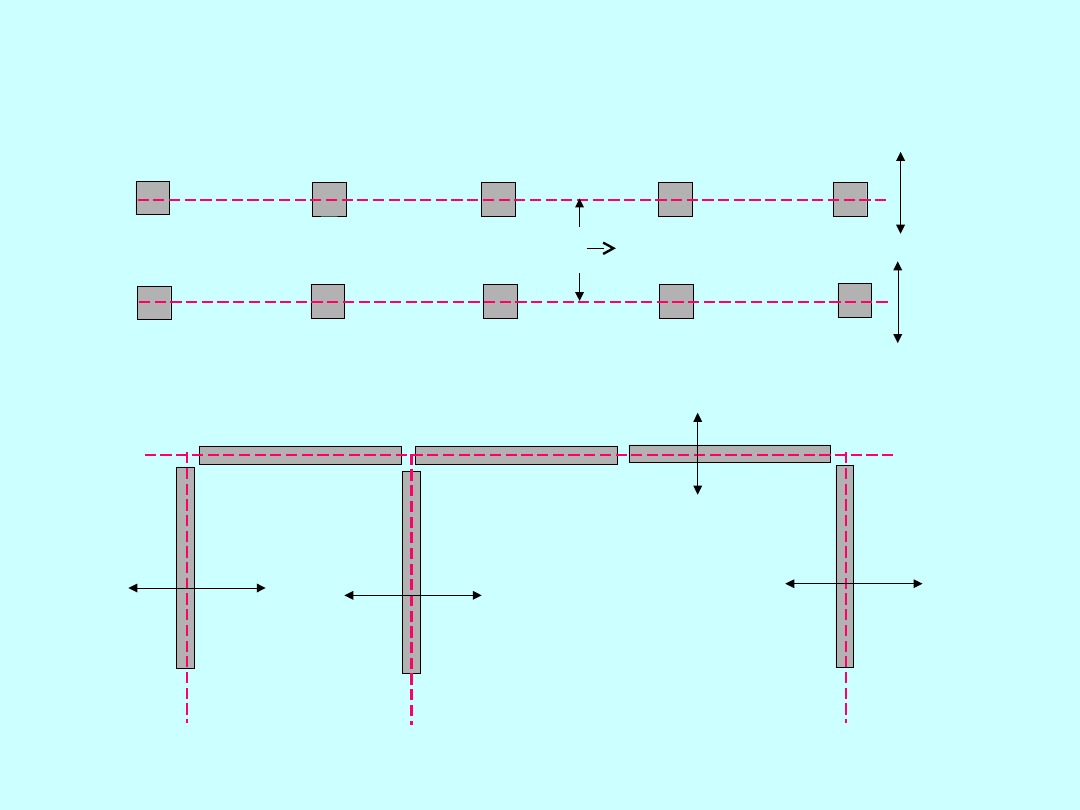
Tolerancja kształtu
Na podstawie zdefiniowanych wymagań dokładności usytuowania
elementów konstrukcji budowli w projektowanej siatce
konstrukcyjnej zadaniem geodety jest ustalenie wymaganej
dokładności wskazania miejsca ustawienia elementu
OGÓLNIE MOŻNA NAPISAĆ
Tu = Tm + Tg
Tm
– część pola tolerancji usytuowania elementu wykorzystana przez
czynności montażowe (budowlane
)
Tg
– część pola tolerancji usytuowania elementu wykorzystana przez
czynności geodezyjne
Tg = Tu – Tm Tg = 2*Mg m
g
= Mg /2r
z taka dokładnością należy wytyczyć i zastabilizować (zaznaczyć)
np. wskaźnik montażowy
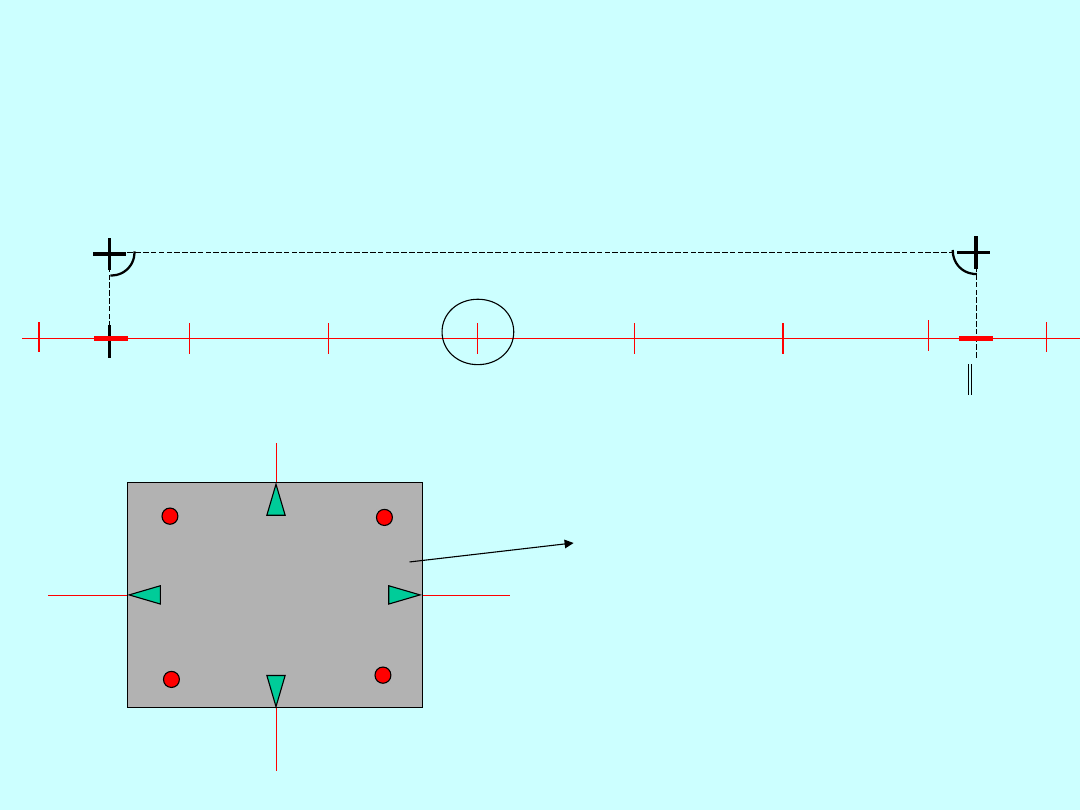
Tolerancja kształtu- przykład
Y
T
y
w
l
s
T
y
p
T
y
/ 2= d
y
Powinien być spełniony
warunek
d
y
> d
w
+ d
l
+ d
s.
+ d
p
+ d
z
Jeżeli geodeta wyznacza
tylko wskaźnik montażowy
i założymy, że
d
w
= d
l
= d
s.
= d
p
=
d
z
= d
to
otrzymamy
d
y
> 5*d
Na prz
ykład
w – wyznaczenie wskaźnika montażowego –
d
w
l – odłożenie odcinka l –
d
l
s – odchyłka wymiaru elementu –
d
s
p – pionowanie elementu –
d
p
z –wpływy zewnętrzne –
d
z
stąd
d =
d
w
=d
y
/ 5 =
T
y
/
10
X
odchyłki
Wstępna analiza dokładności
Zdefiniowany jest cel jaki zamierzamy osiągnąć
-określona tolerancja położenia elementu w siatce konstrukcyjnej
-określona tolerancja projektowanego wymiaru elementu,
-określona dokładność lokalizacji obiektu,
-itp. informacje znane z wykładów z sem. VI
Poszukujemy sposobu rozwiązania zadania
-projektujemy osnowę realizacyjną,
-projektujemy konstrukcję tyczenia,
Projekt obejmuje między innymi
-…
-wymaganą dokładność pomiaru,
-wybór sprzętu do pomiaru,
-sposób wykonania pomiaru
Kiedy należy wykonać wstępną analizę
1.obiekt przewidziany do realizacji charakteryzuje się nowym
rozwiązaniem konstrukcyjnym, nową metodą budowy;
2.narzucone są szczególnie wysokie wymagania dokładnościowe;
3.przewiduje się specyficzne warunki pomiaru lub tyczenia ( drgania,
wysoka temperatura, ograniczony dostęp do obiektu)
4.pomiary doświadczalne
Pierwszy poziom analizy
Kompletnie zaprojektowana konstrukcja tyczenia w celu wyznaczenia
punktów
P
1
i P
2
w taki sposób aby odległość między nimi była wyznaczona z
dokładnością
m
D
Szukamy odpowiedzi
z jaką dokładnością wykonać pomiar
III
I
II
IV
T
1
P
1
P
2
T
2
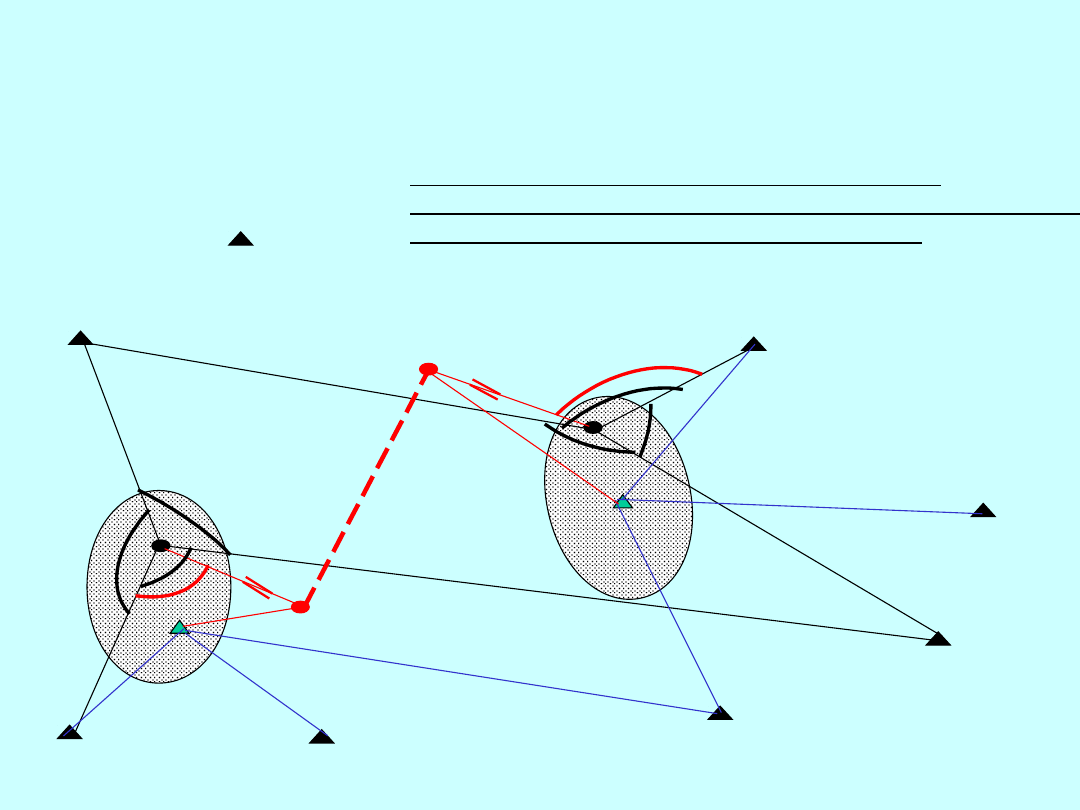
Drugi poziom analizy
III
I
II
IV
T
1
’
P
1
P
2
T
2
’’
T
1
’’
T
2
’
Szukamy odpowiedzi
- w którym miejscu wybrać stanowisko tachimetru,
- z jaką dokładnością wykonać pomiar
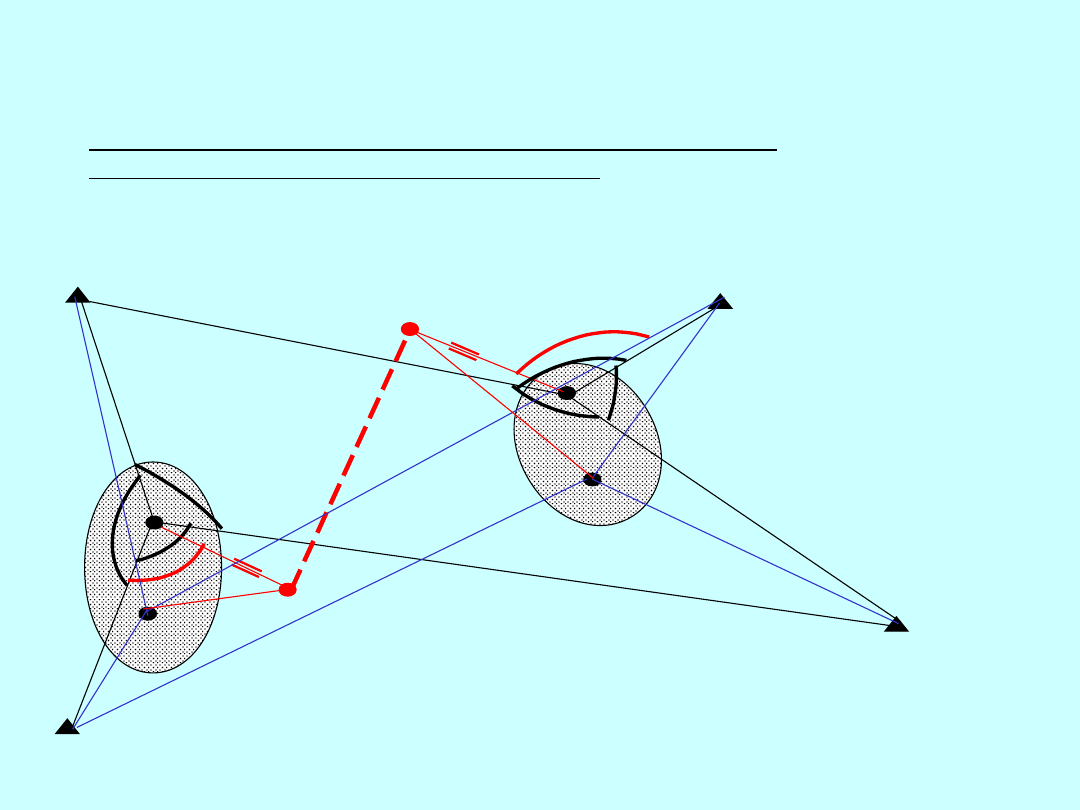
Trzeci poziom analizy
III
I
II
IV
T
1
’
P
1
P
2
T
2
’
VIII
VII
VI
V
T
1
’’
T
2
’’
Szukamy odpowiedzi
-z których punktów osnowy skorzystać,
- w którym miejscu wybrać stanowisko tachimetru,
- z jaką dokładnością wykonać pomiar
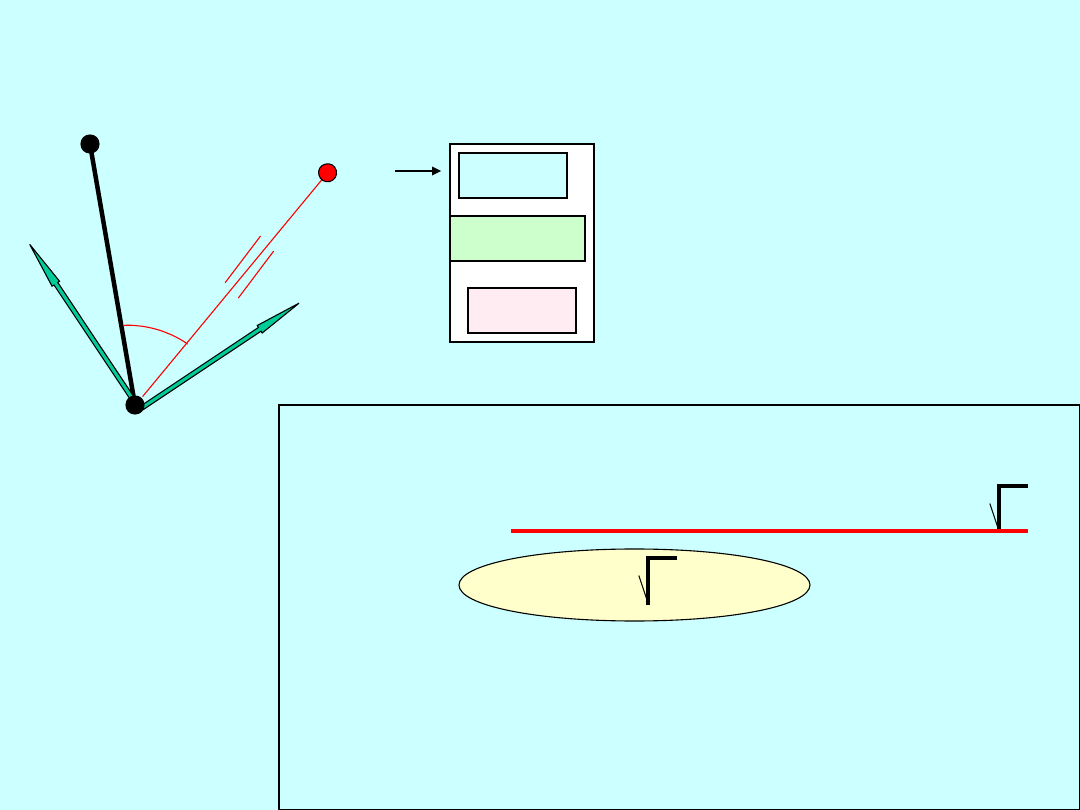
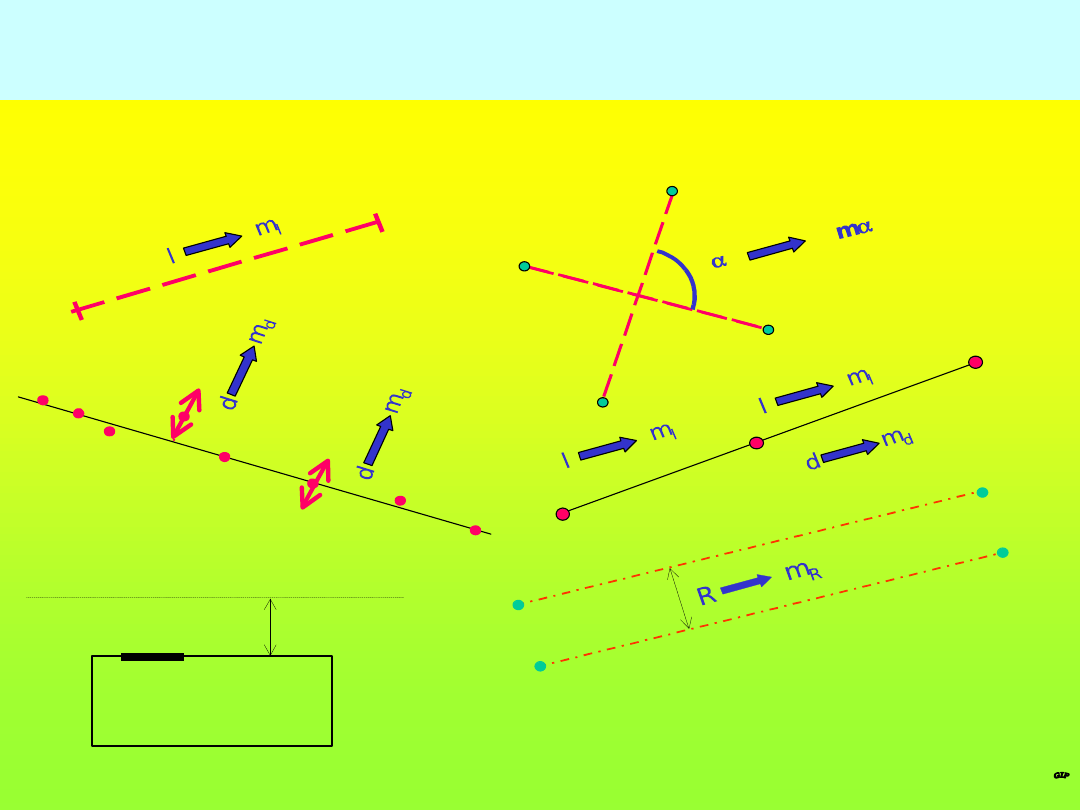
Wstępna analiza konstrukcji jednoznacznych
Wstępna analiza konstrukcji jednoznacznych
P
m
P
m
m
L
m
= ? m
L
= ?
X
Y
I
II
m
X
; m
Y
m
K
A=
m
B=
m
L
= Az
I II
+
m
P
= A
2
+B
2
; jeżeli założyć, że A=B to m
P
=A 2
A=m
P
/ 2 =B
m
= A
m
L
= B
Wstępna analiza konstrukcji
Wstępna analiza konstrukcji
jednoznacznych
jednoznacznych
m
X
m
Y
m
X
m
Y
m
X
=14 mm
m
Y
=10mm
P
m
X
2
= m
L
2
sin
2
+m
2
cos
2
m
Y
2
= m
L
2
cos
2
+m
2
sin
2
m
L
m
L
m
X
m
Y
m
m
m
L
=?
m
=?
Nie ma jednoznacznej
odpowiedzi
Wstępna analiza konstrukcji
Wstępna analiza konstrukcji
jednoznacznych
jednoznacznych
P
m
k
podobnie jest w przypadku tyczenia punktu, którego wymagana
dokładność położenia
m
k
jest określona w zadanym kierunku „
k
”
m
k
2
= m
L
2
sin
2
+m
2
cos
2
- jest wielkością zdefiniowaną i dla
różnych wartości
m
L
i m
możemy
uzyskać wymaganą dokładność
tyczenia m
k
Y
X
k
Wstępna analiza konstrukcji
Wstępna analiza konstrukcji
jednoznacznych
jednoznacznych
W każdym z trzech rozważanych przypadków można uzyskać
poszukiwaną odpowiedź np.. przy założeniu, że długość można
pomierzyć z dokładnością m
d
1)
m
L
= m
d
;
m
= m
P
2
– m
d
2
3)
m
L
= m
d
;
m
=
m
k
2
–m
d
2
sin
2
cos
2
2)
m
L
= m
d
m
x
=
m
x
2
–m
d
2
sin
2
cos
2
m
Y
=
m
Y
2
–m
d
2
sin
2
cos
2
otrzymujemy dwie
różne wartości i jako
oczekiwaną dokładność
pomiaru kąta przyjmujemy
wartość mniejszą
W
W
stępna analiza konstrukcji
stępna analiza konstrukcji
jednoznacznych
jednoznacznych
P
1
P
2
P
3
P
4
P
5
m
L
= m
d
;
m
1
=
m
k
2
–m
d
2
cos
2
2
sin
2
2
m
2
=
m
k
2
–m
d
2
cos
2
1
sin
2
1
m
51
=
m
k
2
–m
d
2
cos
2
5
sin
2
5
.
.
.
.
.
.
otrzymujemy pięć
różnych wartości i jako
oczekiwaną dokładność
pomiaru kąta przyjmujemy
wartość mniejszą
5
1
W
W
stępna analiza konstrukcji
stępna analiza konstrukcji
jednoznacznych
jednoznacznych
P
1
P
2
P
3
P
4
P
5
5
1
m
d
m
d
m
d
A
B
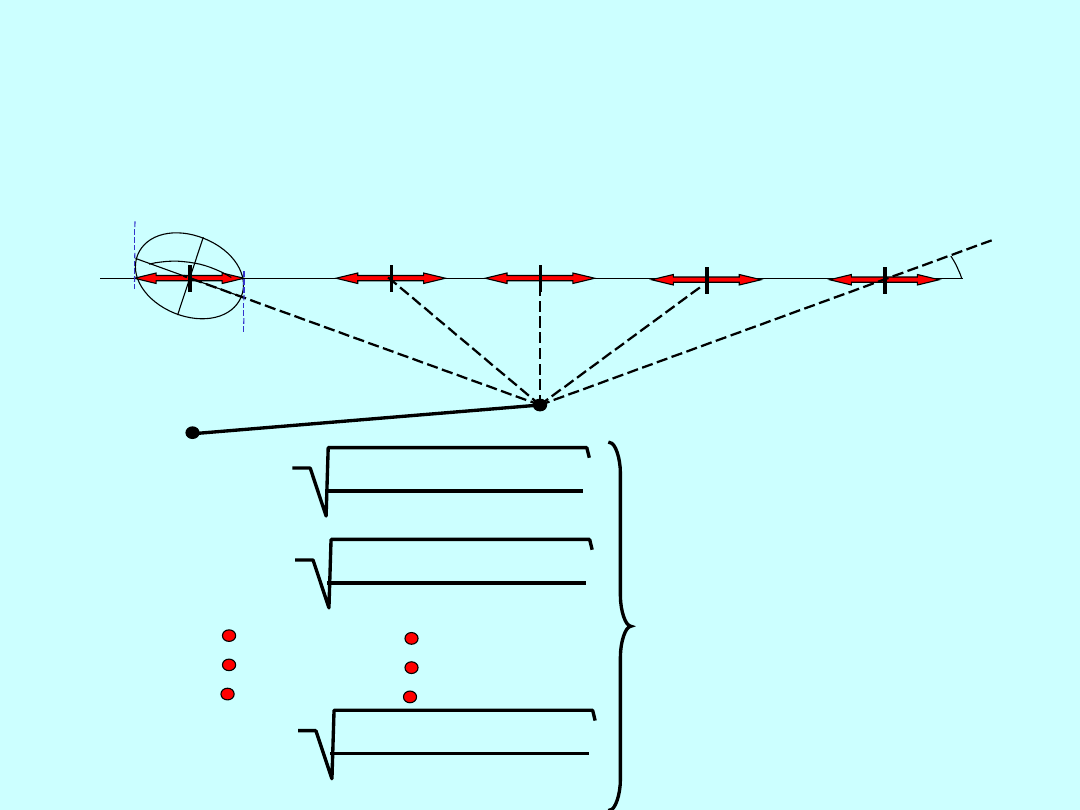
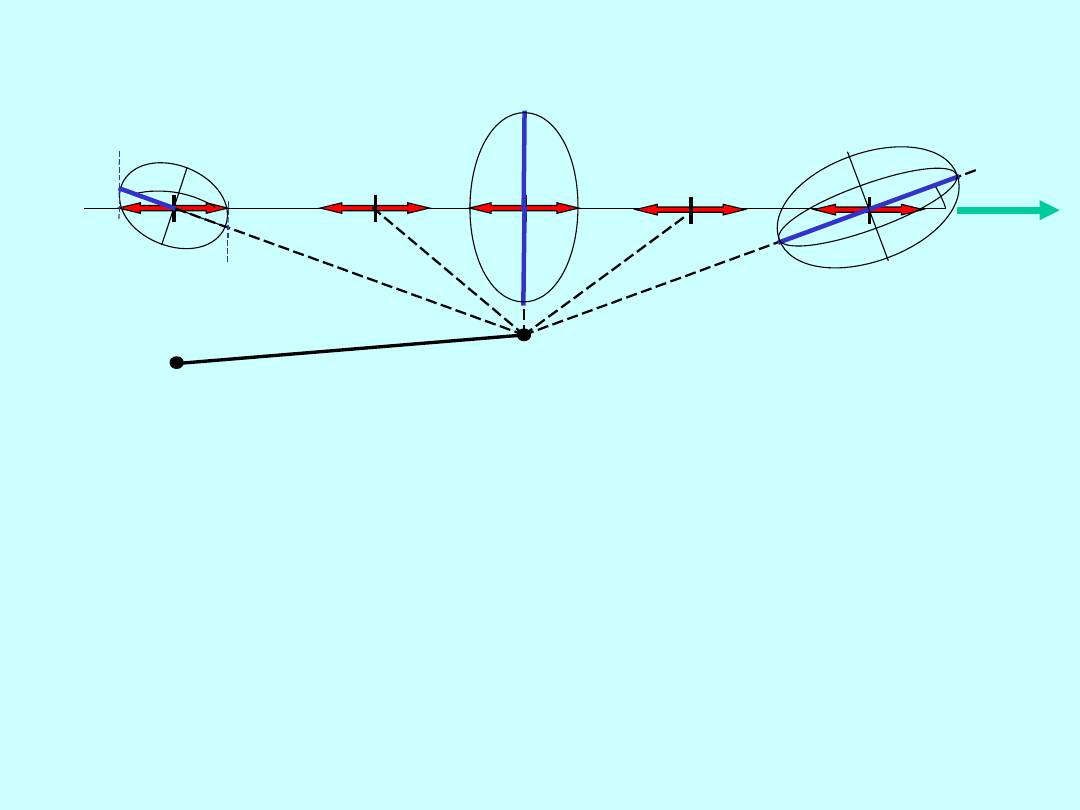
Punkt P
1
– dokładność położenia punktu na linii zależy od dokładności pomiaru kąta
i długości.
Punkt P
3
– dokładność położenia punktu na linii zależy tylko od dokładności pomiaru
kata.
Punkt P
5
- jeżeli długość jest mierzona ze zbyt małą dokładnością to niezależnie od
dokładności pomiaru kąta nie uzyskamy pożądanego rezultatu
k
W
W
stępna analiza konstrukcji
stępna analiza konstrukcji
jednoznacznych
jednoznacznych
A
C
B
A
B
C
D
1)
Tyczone są punkty A, B i C –punkt C ma leżeć na osi AB
z dokładnością m
d
m
d
2) Tyczone są punkty A, B, C i D –
punkt C ma leżeć w odległości d
C
od osi AB
punkt D ma leżeć w odległości d
D
od osi AB.
Ustalone odległości mają być zrealizowane
z dokładnością m
d
W
W
stępna analiza konstrukcji
stępna analiza konstrukcji
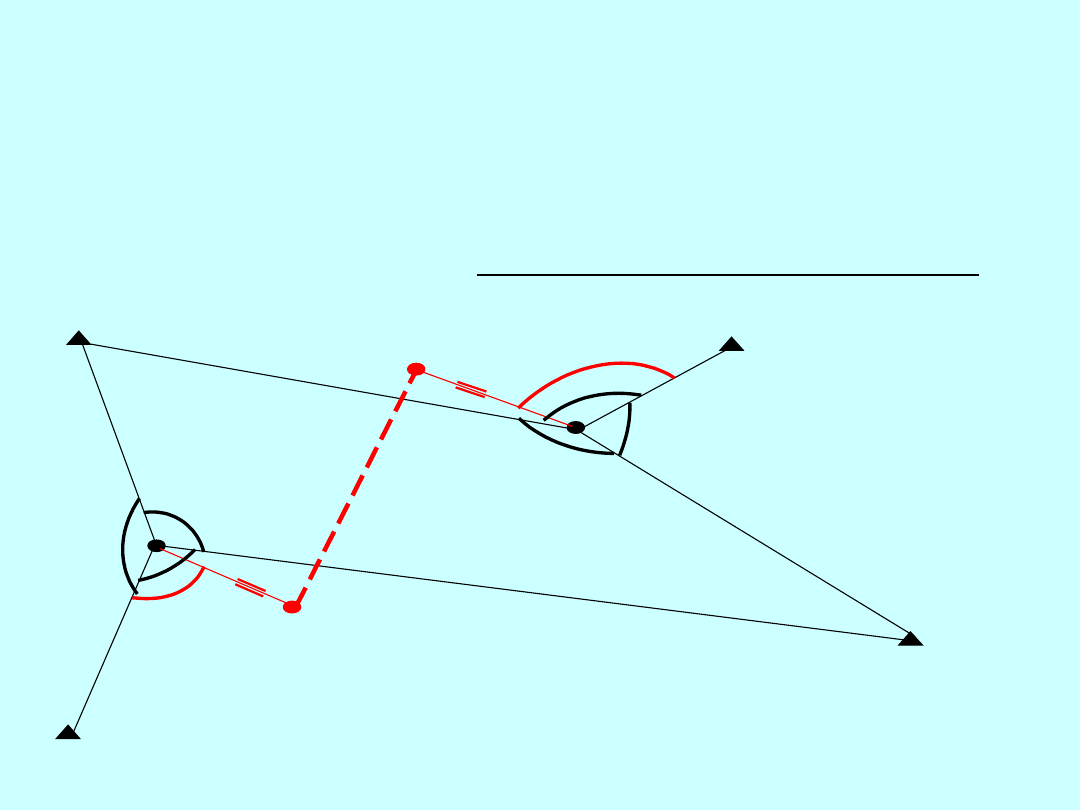
jednoznacznych
jednoznacznych
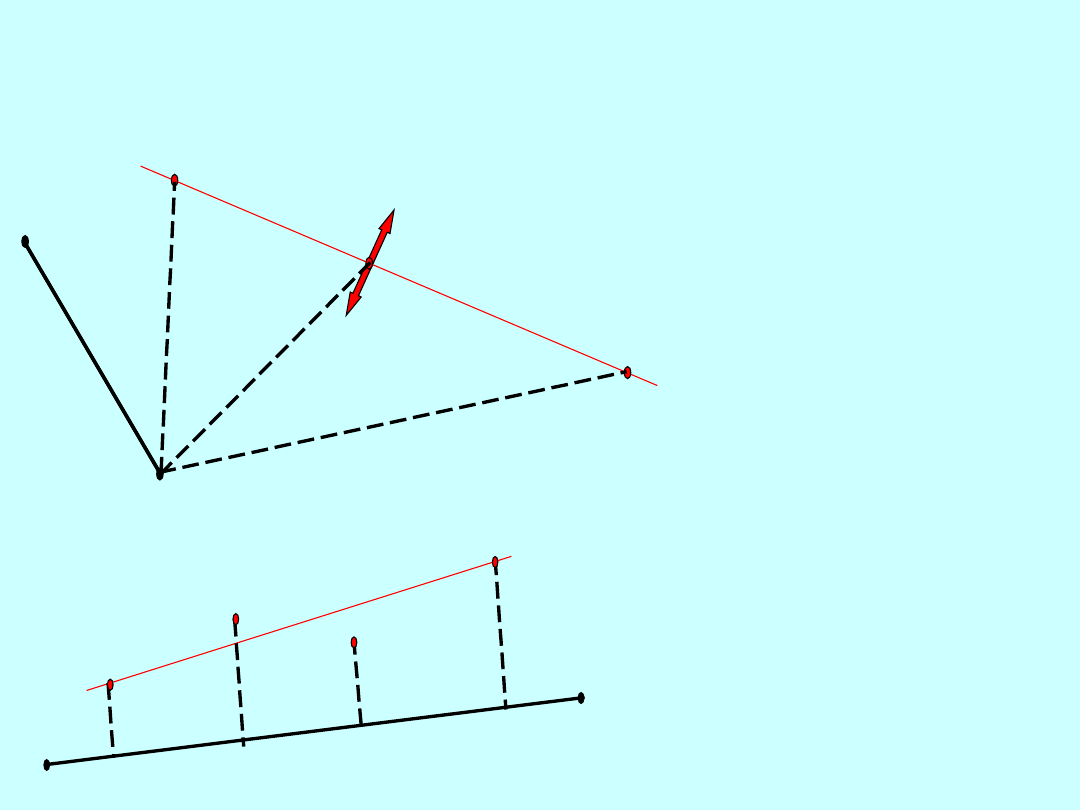
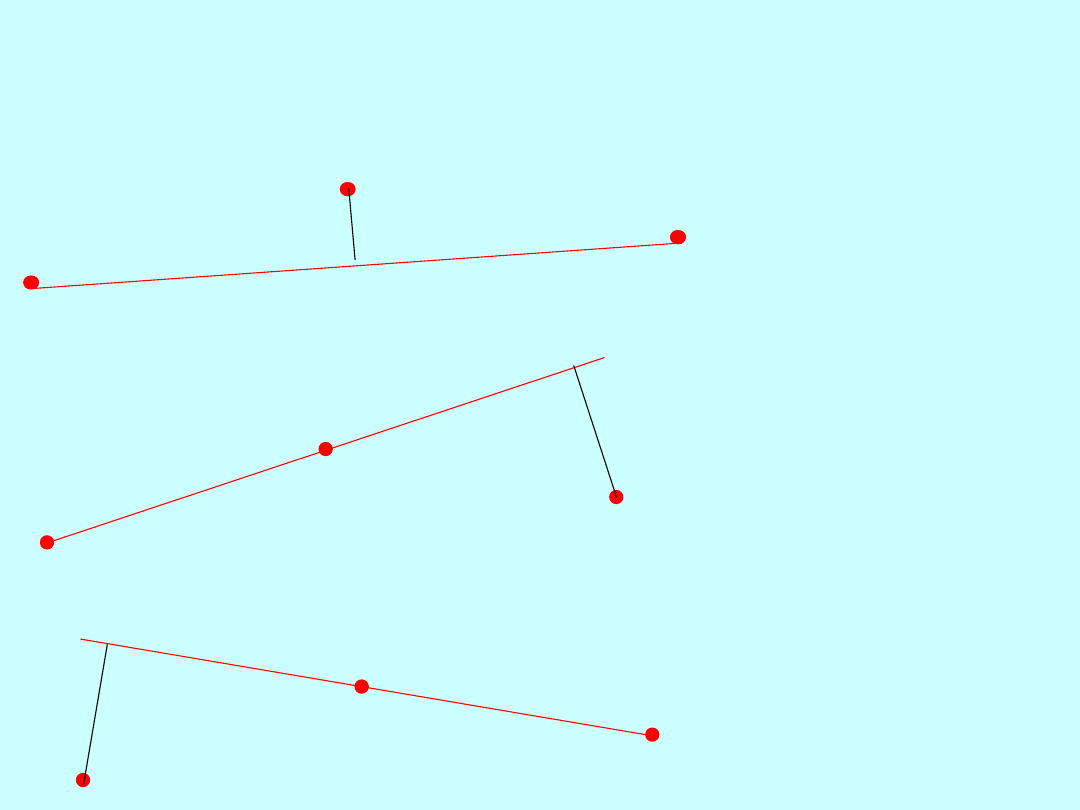
Odchylenie punktu
k
od prostej
i,j
i
j
k
d
i,j,k
Odchylenie punktu
j
od prostej
i,k
i
j
k
d
i,j,k
d
i,k,j
Odchylenie punktu
i
od prostej
k,i
i
j
k
d
j,k,
i
f =
W
W
stępna analiza konstrukcji
stępna analiza konstrukcji
jednoznacznych
jednoznacznych
{A
2
}
-1
=
aa
ab ac ad
ba
bb
bc bd
ca cb
cc
cd
da db dc
dd
{A
2
}
-1
=
aa
ab 0 0
ba
bb
0 0
0 0
cc
cd
0 0 dc
dd
{A
2
}
-1
=
-elementy na przekątnej- wariancje ; kwadraty średnich błędów
niewiadomych,
-elementy poza przekątną – cowariancje; wartości określające
stopień zależności pomiędzy
niewiadomymi (jeżeli covariancja jest
równa zero to niewiadome są niezależne)
aa
bb
cc
dd
„
0
”
„0”
-wszystkie cowariancje równe zero - niewiadome są niezależne,
np..punkty osi konstrukcyjnych tyczone metodą przecięć
kierunków z przyjętego za bezbłędny prostokąta podstawowego
( wyznaczenie współrzędnej X jest niezależne od wyznaczenia
współrzędnej Y).
-każdy punkt wyznaczany jest w sposób niezależny
np..punkty tyczone metodą biegunową z bezbłędnej
bazy tyczenia.
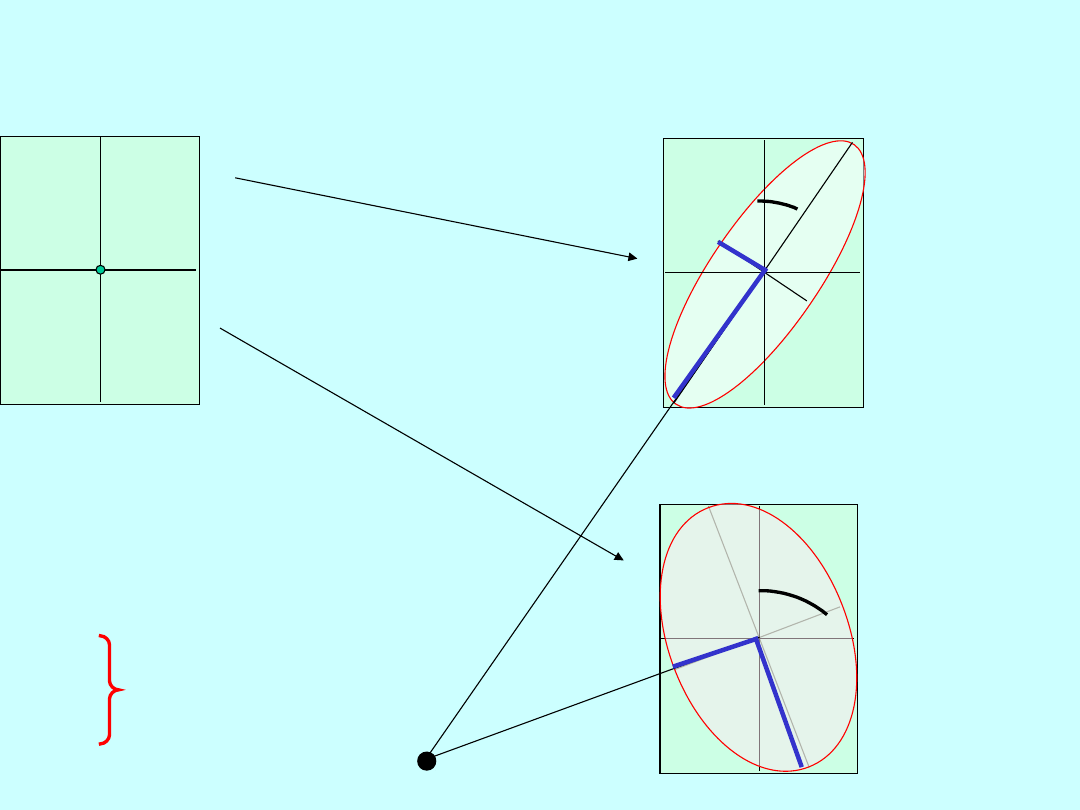
{a
{a
2
2
}
}
-1
-1
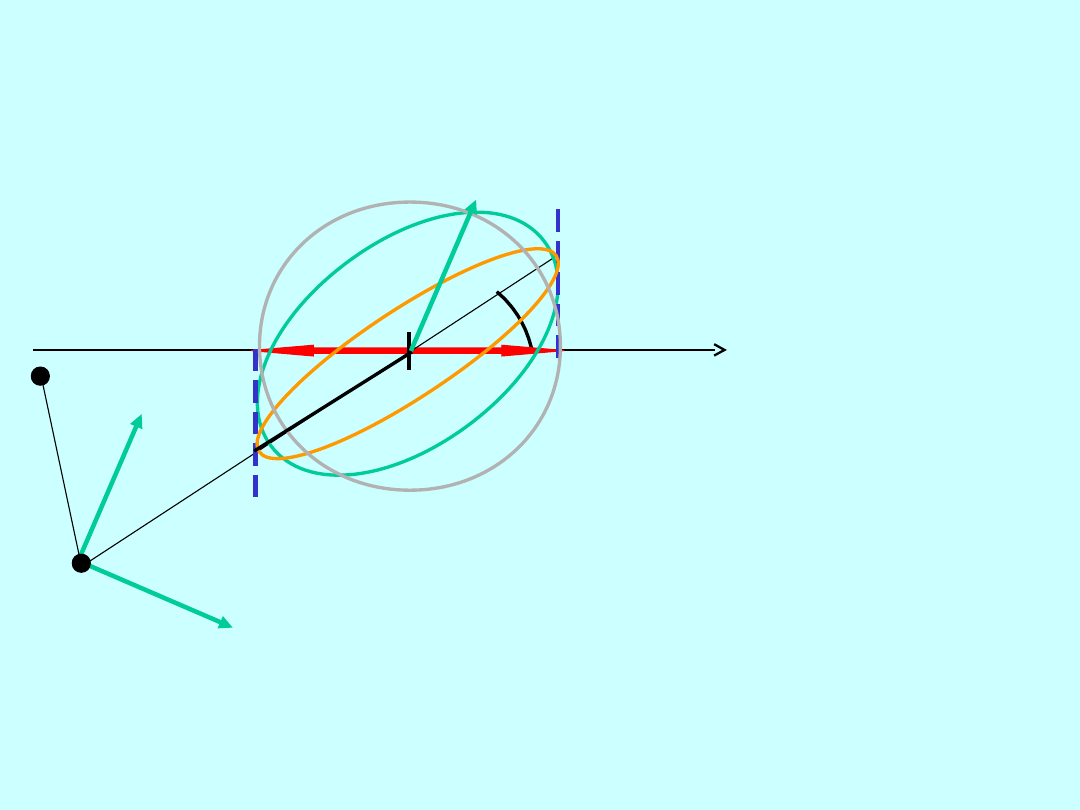
Dla każdego tyczonego punktu
przy założeniu
dokładności odłożenia
obserwacji m
L
’
, m
’
możemy określić parametry
elipsy błędu A, B,
aa ab 0 0 0 0
ab bb 0 0 0 0
0 0 cc cd 0 0
0 0 cd dd 0 0
0 0 0 0 ee ef
0 0 0 0 ef f f
i j k
{A
2
}
-1
=
{e
2
}
-1
=
{e
2
}
-1
A, B,
{e
2
} =
AA AB
BA BB
AA = p
- r
cos
BB = p +r
cos
AB = - rsin
p =
r =
aa= BB
AA*BB-AB
2
bb= AA
AA*BB-AB
2
ab= - AB
AA*BB-AB
2
A
i
2
+ B
i
2
2A
i
2
B
i
2
A
i
2
- B
i
2
2A
i
2
B
i
2
m
F
= m
0
f A
2 -1
f
W
W
stępna analiza konstrukcji bez
stępna analiza konstrukcji bez
obserwacji nadliczbowych
obserwacji nadliczbowych
f – krakowian funkcyjny
Dla kąta -
a
1
dx
L
+ b
1
dy
L
+ c
1
dx
P
+ d
1
dy
P
+
e
1
dx
C
+ f
1
dy
C
Dla długości –
a
2
dx
L
+ b
2
dy
L
+ c
2
dx
P
+ d
2
dy
P
Dla odchylenia punktu od prostej
a
1
dx
L
+ b
1
dy
L
+ c
1
dx
P
+ d
1
dy
P
+
e
1
dx
C
+ f
1
dy
C
Dla niewiadomej X a
1
dx
L
Dla niewiadomej Y b
1
dy
L
Dla kierunku
a
1
dx
L
+ b
1
dy
L
+ c
1
dx
P
+ d
1
dy
P
itd
Współczynniki przy
niewiadomych
w równaniach
obserwacyjnych
(poprawek) przed
zrównoważeniem
PRZYKŁAD 1
P
1
P
2
x
1
x
1
y
1
y
1
x
2
x
2
y
2
y
2
X
X
Y
d
=
q
A
z
P1
P2
=
s
m
x1
; m
y1
; m
x2
;
m
y2
m
x1
= m
y1
= m
x2
=
m
y2
=m
md= q/r
md
2
=m
0
2
-
cos
b
-
sinb
cos
b
sinb
m
2
m
2
m
2
m
2
0
0
-
cos
b
-
sinb
cos
b
sinb
md=m
0
m
x
2
m
x
= md/
2
PRZYKŁAD 2
1
2
3
4
a
b
ab
6
V = (2h
1
+h
2
+2h
3
+h
4
)
H
o
Z jaką dokładnością należy pomierzyć wysokości
punktów 1, 2, 3, 4, aby błąd objętości bryły nie
przekroczył wartości dopuszczalnej V=5m
3
a=b=10m
ab
3
ab
6
ab
3
ab
6
f=
m
h
2
m
h
2
m
h
2
m
h
2
{a
2
}
-1
=
0
0
m
V
= V/3 = 1,7m
3
ab
2
m
V
= m
h
m
h
= m
V
50 = 3cm
PRZYKŁAD 3
A
B
P
1
P
2
d=10mm
A
1
=A
2
= m
l
’
=5mm
B
1
=B
2
=
m
’=3mm
1
= 50
g
2
=100
g
=150
g
m
k1
2
= 9 m
k2
2
= 17
m
d
=
d 3
=3,3mm
m
d
= m
o
m
k1
2
+ m
k2
2
=5,1mm
m
0
= 3,3 5,1= 0,65
m
l
=0,65 m
l
’
=
3,2mm
m
=0,65 m
’ =
2,0mm
1
2
1
-1
-1
1
f
d
=
A
2 -1
=
22 5
5 11
17
8
8
17
0
0
m
d
= m
o
f
d
A
2 -1
f
d
po rozwiązaniu równania otrzymamy
m
d
= m
o
20,5
m
0
= 3,3 4,5= 0,73
m
l
=0,73 m
l
’
=
3,7mm
m
=0,73 m
’ =
2,2mm
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
Wyszukiwarka
Podobne podstrony:
VII wykład
TRANSPORT KOPALNIANY VII wykład
Podstawy ergonomii, WYKŁAD VII, WYKŁAD VII
GIS wykłady VII wykład
wykłady Czapli Fizjologia człowieka (VII wyklad, 7 04 2011 r )
Fizjologia człowieka (VII wyklad, 7 04 2011 r )
wykady pozyt, Wykład VII, Wykład VII
VII WYKLAD 2
biofiz, Wykład VII, Wykład VII
VII WYKLAD 3
VII wyklad 28 11 2
WYKŁAD VII
Wykład VII hazard, realizacja na NAND i NOR
Wykład VII, politechnika infa 2 st, Projektowanie Systemów Informatycznych
wykład VII, LEŚNICTWO SGGW, MATERIAŁY LEŚNICTWO SGGW, Transport, TRANSPORT
Wykład VII, Studia Biologia, Mikrobiologia, wykłady z ogólnej
(Wykład VII)id 1478
3-7.12.09, Studia, IV rok, IV rok, VII semestr, Waloryzacja przyrodnicza, wyklady cwiczenia w word
więcej podobnych podstron