
RUCH KRZYWOLINIOWY
Ogólna charakterystyka ruchu krzywoliniowego
Kinematyka skrętu
Boczne znoszenie ogumienia
Problem nadsterowności i podsterowności
pojazdu
Prędkość jazdy na łuku drogi. Zarzucanie
samochodu
Wywrócenie pojazdu na łuku drogi
Ogólna charakterystyka ruchu
krzywoliniowego
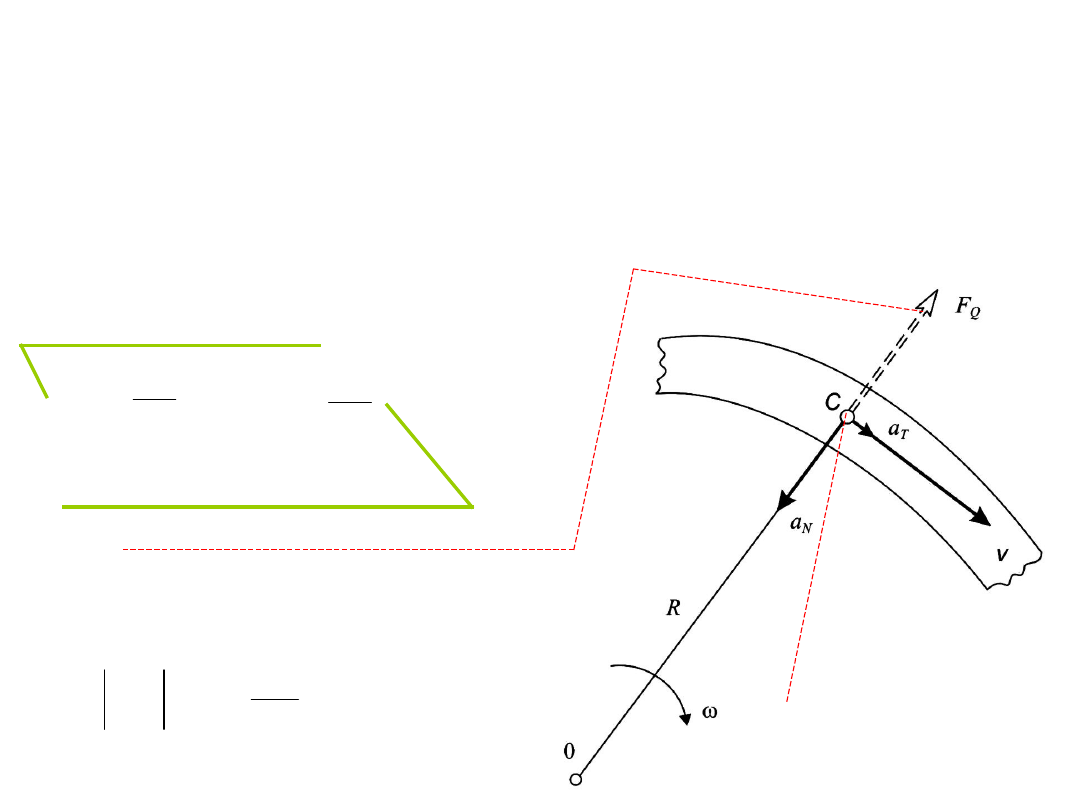
Krzywoliniowy ruch pojazdu wiąże się z obecnością
przyspieszeń poprzecznych. Typowe sytuacje, w których
występuje ruch krzywoliniowy to jazda na łuku drogi,
manewr zmiany pasa ruchu i omijania przeszkód.
a
d
dt
T
v
a
R
N
v
2
F
ma
Q
N
F
m
R
mR
Q
v
2
2
- przyspieszenie styczne
- przyspieszenie normalne
- siła odśrodkowa (bezwładności)
Środek
masy
pojazdu
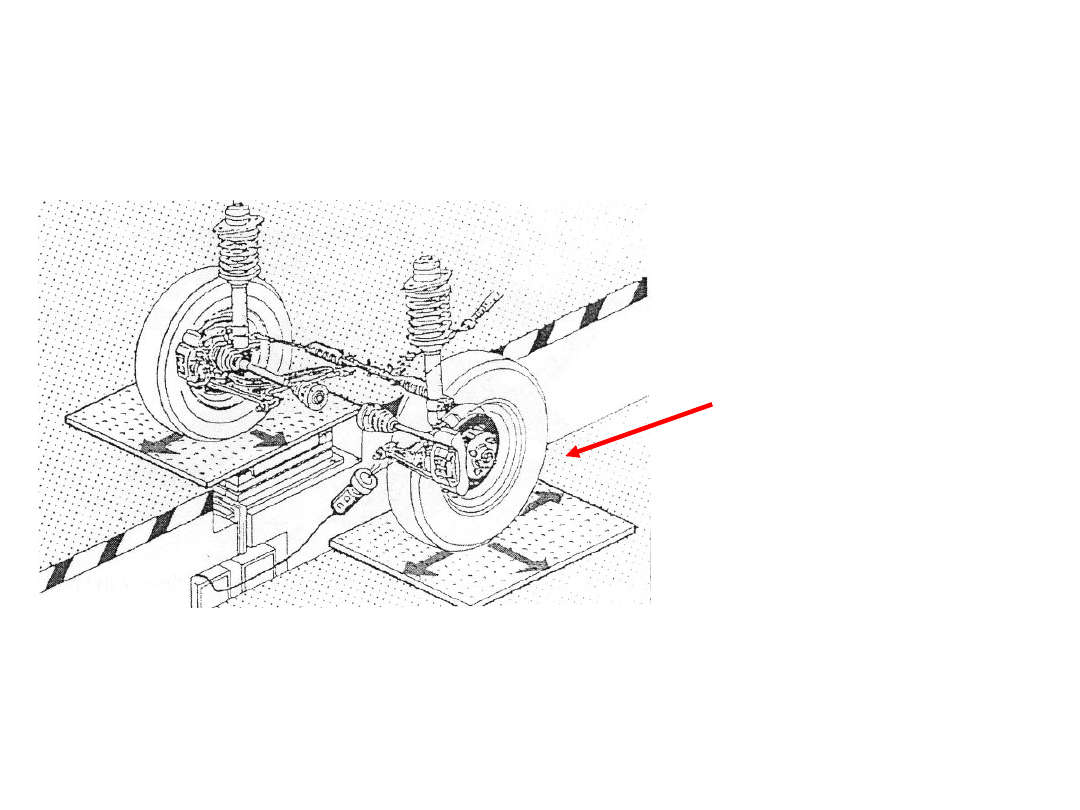
Schemat urządzenia do wykrywania luzów w układzie
kierowniczym. Przykładowo: szarparki składają się z
dwóch napędzanych zwykle siłownikami hydraulicznymi
lub pneumatycznymi płytami , na których stawiane są
koła pojazdów
Kierowanie samochodem wymaga
sprawnego działania układu
kierowniczego
Siły działające od
drogi na koła
ujawniają luzy w
układzie
kierowniczym i
jezdnym
(diagnostyka). Luzy
te wpływają na
ustawienie kół
podczas skrętu
DIAGNOSTYKA
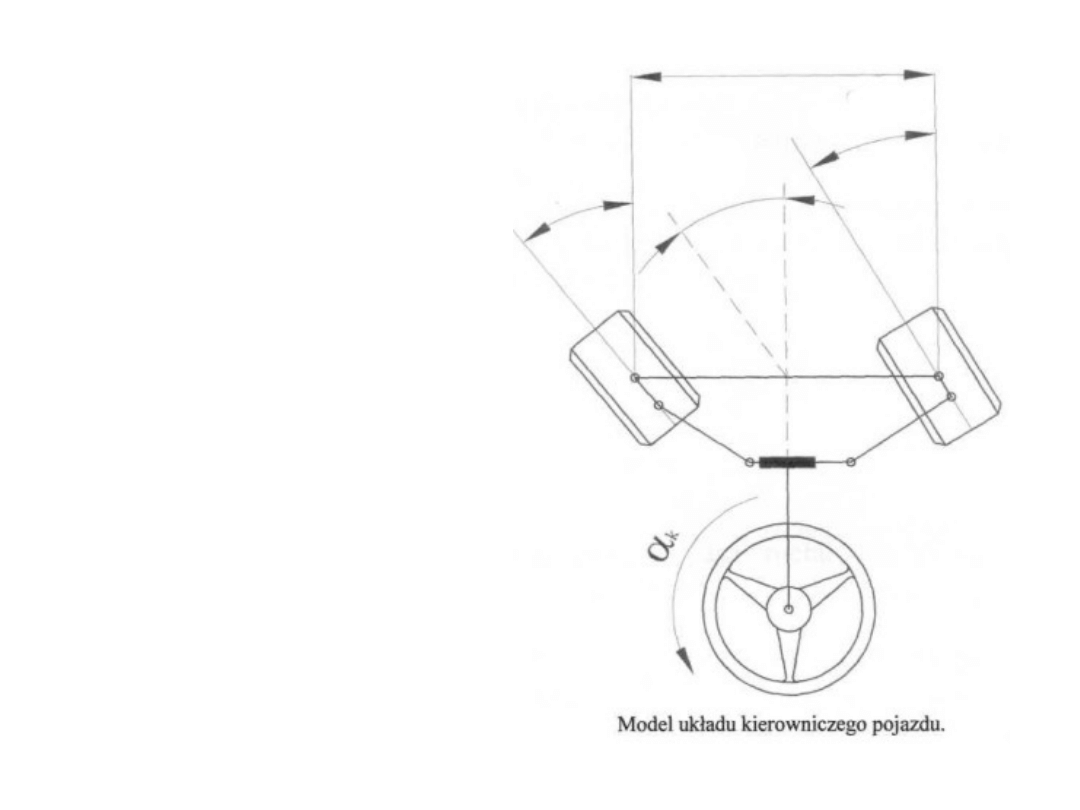
Kąty skręcenia
kół
Wpływ urządzeń automatycznego sterowania na stabilizację ruchu pojazdu, A. Szosland
Sprawozdanie z PB 2006r
1
K
b
1
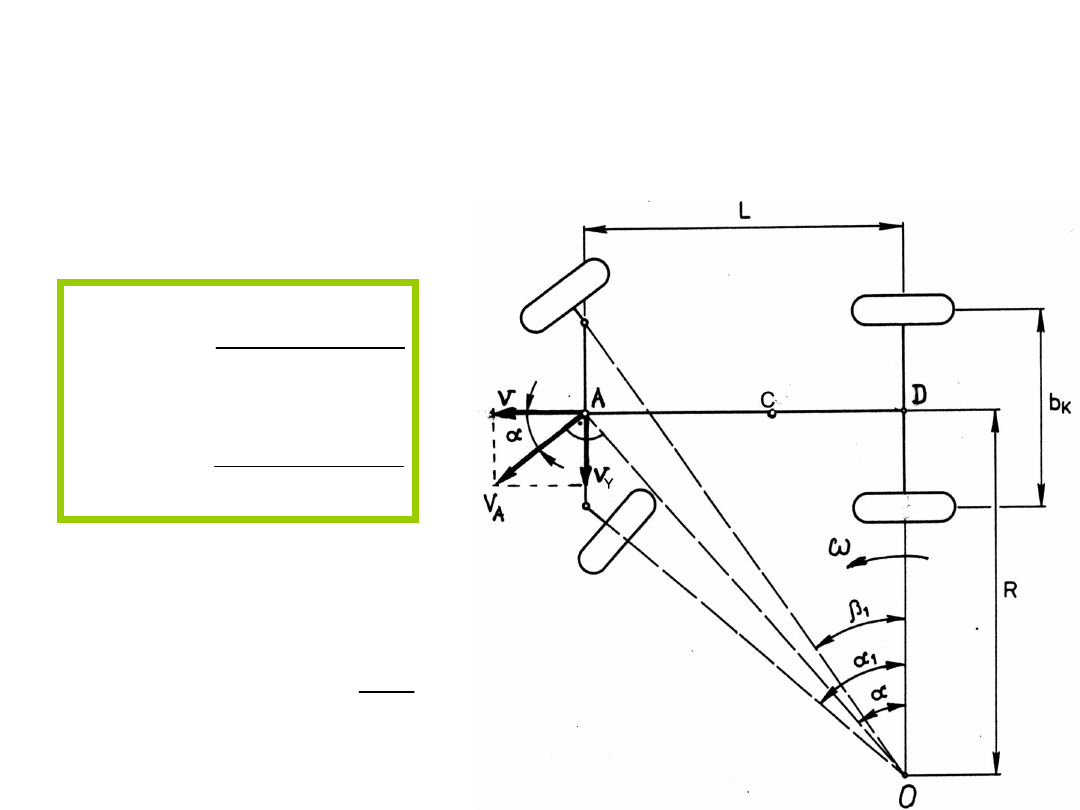
Kinematyka skrętu
Rozważono skręt samochodu dwuosiowego przy
niewielkiej prędkości jazdy i bez uwzględnienia bocznej
elastyczności ogumienia. Obliczono kąty skręcenia kół
Kąty skręcenia koła
lewego i prawego są
różne.
ctg
R
b
L
ctg
R
b
L
K
K
1
1
05
05
,
,
ctg
ctg
b
L
const
K
1
1
Średni kąt skręcenia kół
Promień skrętu oblicza się
R
L
tg
Średni kąt skręcenia kół , który zwykle jest
potrzebny podczas analizy kinematyki skrętu
samochodu, wynosi
ctg
ctg
ctg
05
1
1
, (
)
Przełożenie kinematyczne
układu kierowniczego
i
K
K
i
K
16 25
...
Zwykle
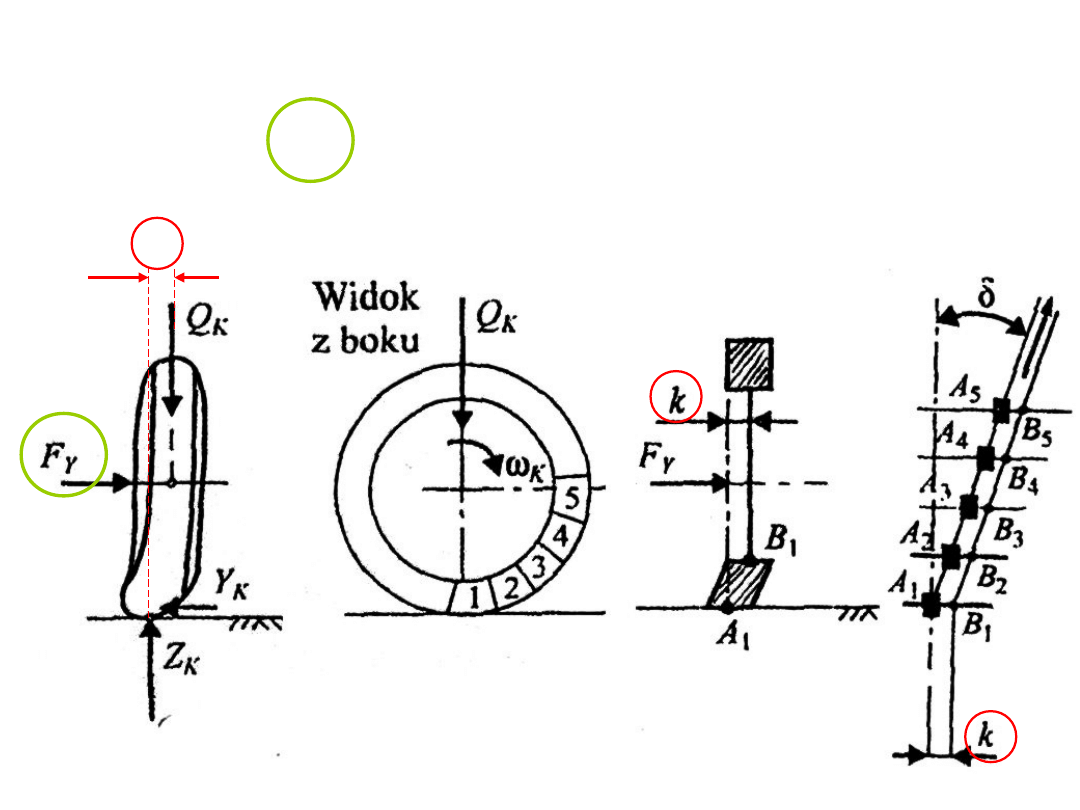
Boczne znoszenie ogumienia
Siła boczna
F
Y
na oś koła jezdnego, powoduje odkształcenie powłoki ogumienia
, działająca od strony samochodu
k
Odchylenie kierunku toczenia się
samochodu pod działaniem siły bocznej
Planowany kierunek ruchu
samochodu
Rzeczywist
y ruch
samochodu
Kąt
znoszenia
Siła boczna
zmienia
kierunek jazdy
mimo, że koła
kierowane nie
są skręcone
Boczne odkształcenie powłoki opony
wywołuje zmianę kierunku toczenia się kół
jezdnych.
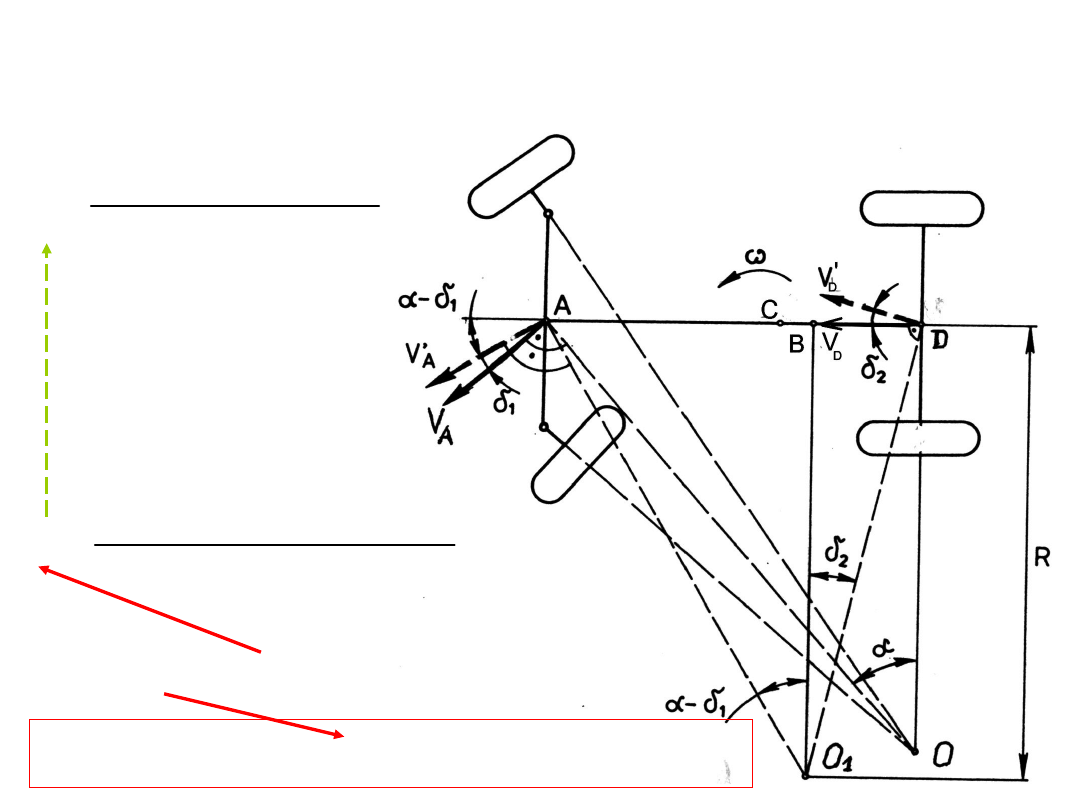
Kinematyka skrętu z uwzględnieniem
bocznego znoszenia ogumienia
L AB BD O Btg
O Btg
1
1
1
2
(
)
O B R
1
R
L
tg
tg
(
)
1
2
)
(
1
2
tg
L
R
Znoszenie
ogumienia
powoduje
zmianę
promienia
skrętu
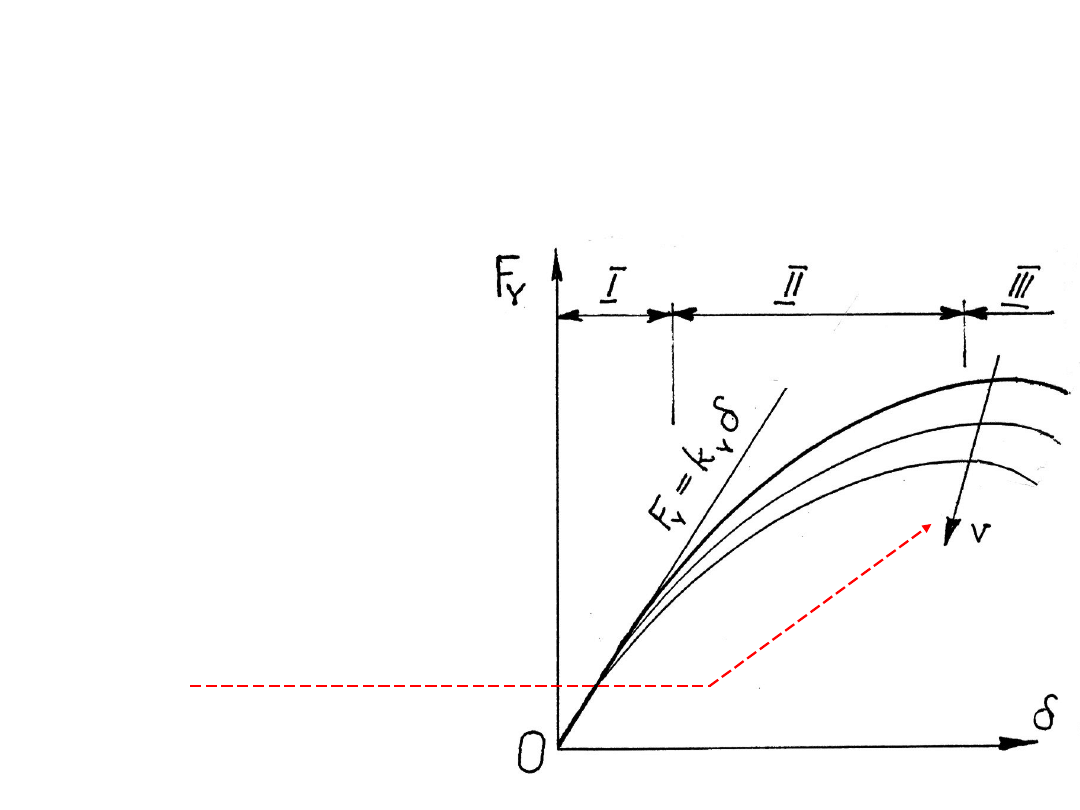
Odporność opon na boczne
znoszenie
F
Y
F
k
Y
Y
Znoszenie elastycznego ogumienia, wywołane
działaniem siły bocznej
opisano zależnością
od samochodu na
koła,
Obniżanie
odporności na
boczne znoszenie ze
wzrostem prędkości
jazdy zaznaczono
strzałką
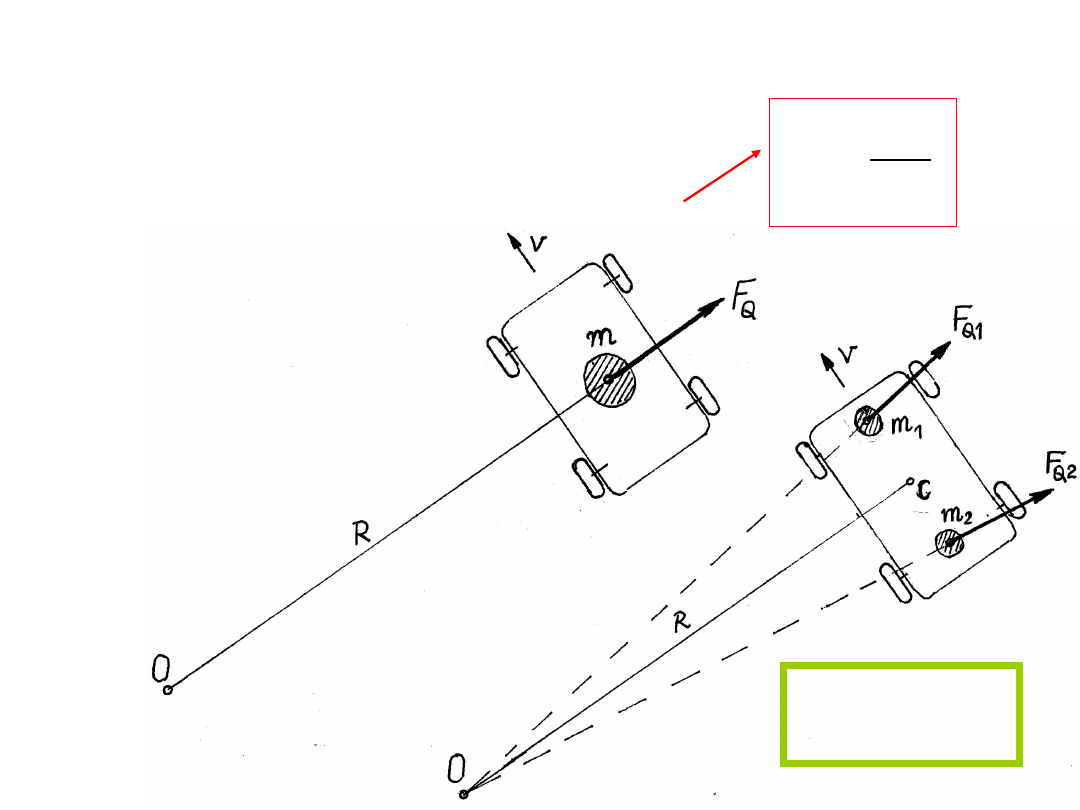
Problem nadsterowności i
podsterowności pojazdu
Kąt znoszenia i-tej osi kół
obliczamy
Yi
Yi
i
k
F
Obliczone z tej
zależności wartości
kątów znoszenia
ogumienia osi
przedniej i tylnej
mogą być różne
i
Q
Yi
F
F
Yi
F
R
k
m
k
F
k
F
Yi
i
Yi
Qi
Yi
Yi
i
2
v
Dysponując wartościami sił bocznych
wyznaczono kąty znoszenia ogumienia osi kół przednich
i tylnych
2
1
Przypadek 1. Wartości kątów znoszenia kół osi przedniej
i tylnej
są równe, zatem
nie wpływa na wartość promienia skrętu.
=0. Znoszenie
Samochód jest z neutralną
charakterystyką
sterowności
.
Problem nadsterowności i podsterowności
pojazdu, cd
Problem nadsterowności i
podsterowności pojazdu, cd 2
Przypadek 2. Kąt znoszenia ogumienia kół przednich
jest większy niż kąt znoszenia kół osi tylnej
Tę właściwość pojazdu nazwano podsterownością.
Wówczas pojazd na łuku drogi porusza się
oddalając od zadanego
2
1
<0
toru jazdy; rośnie promień
skrętu.
Przypadek 3. Kąt znoszenia ogumienia osi kół tylnych
jest większy niż kąt znoszenia na kołach przednich, zatem
2
1
>0
Pojazd na łuku drogi dąży do zmniejszenia promienia skrętu
(pojazd jest nadsterowny).
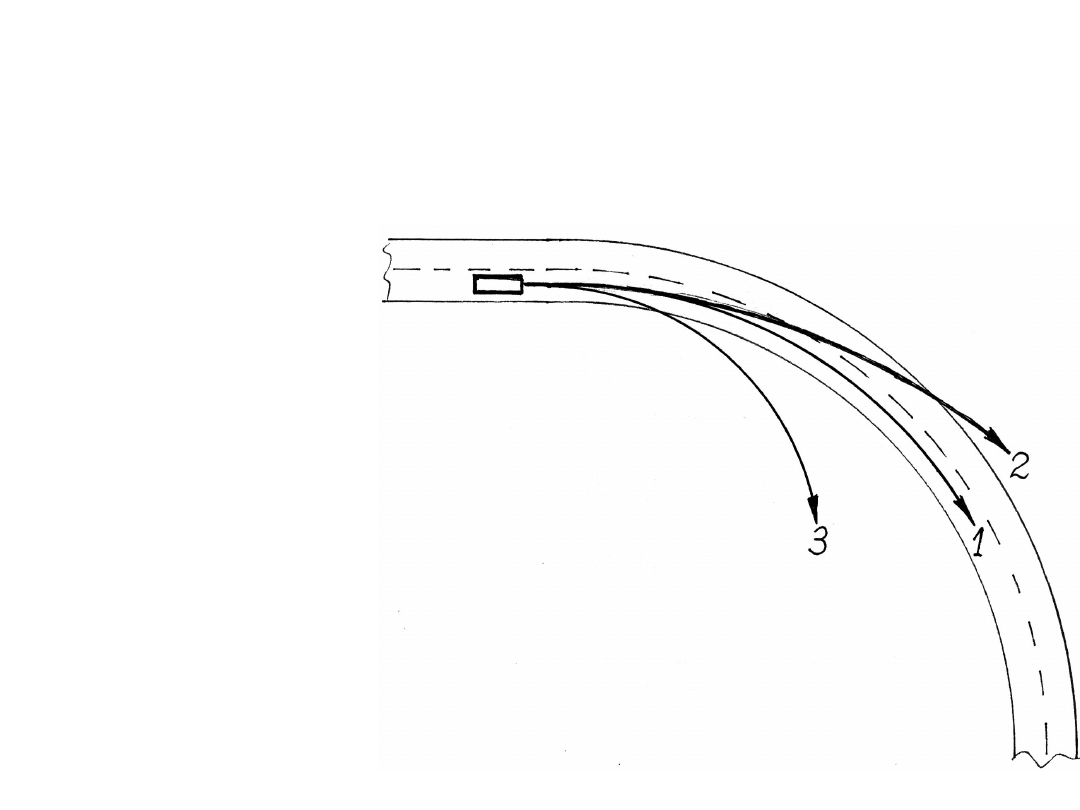
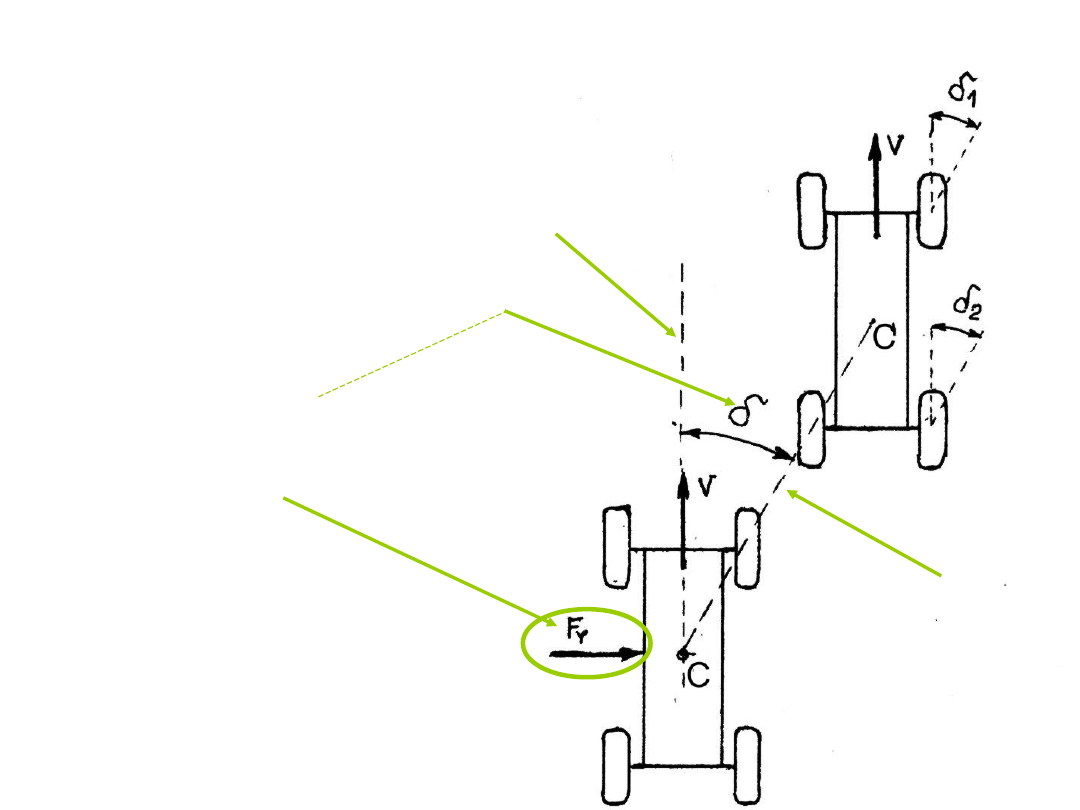
Problem nadsterowności i podsterowności
pojazdu, cd 3
Wpływ znoszenia na tor ruchu środka masy
pojazdu na łuku drogi
Sterowność
(neutralna, pod-,
nad-sterowność) nie
jest stałą cechą
pojazdu.
Pojęcie sterowności
samochodu zostało tu
odniesione do samoczynnej
zmiany krzywizny toru jazdy
w rezultacie znoszenia
ogumienia. Obejmuje także
samosterowność
zawieszenia

Prędkość jazdy na łuku drogi
Podczas jazdy na łuku drogi, siły boczne działające na
pojazd mogą spowodować jego zarzucenie lub
wywrócenie. Uniknięcie tych niekorzystnych sytuacji jest
możliwe. Ustalenie prędkości jazdy, której przekroczenie
może spowodować zarzucenie samochodu, jest celem
prowadzonych dalej rozważań.
Uwzględniono:
N
W
F
P
i
X
i
Y
wypadkowa siła naporu wiatru bocznego,
opór powietrza (czołowy),
reakcje styczne obwodowe na poszczególnych
osiach jezdnych,
reakcje styczne boczne na osiach kół.
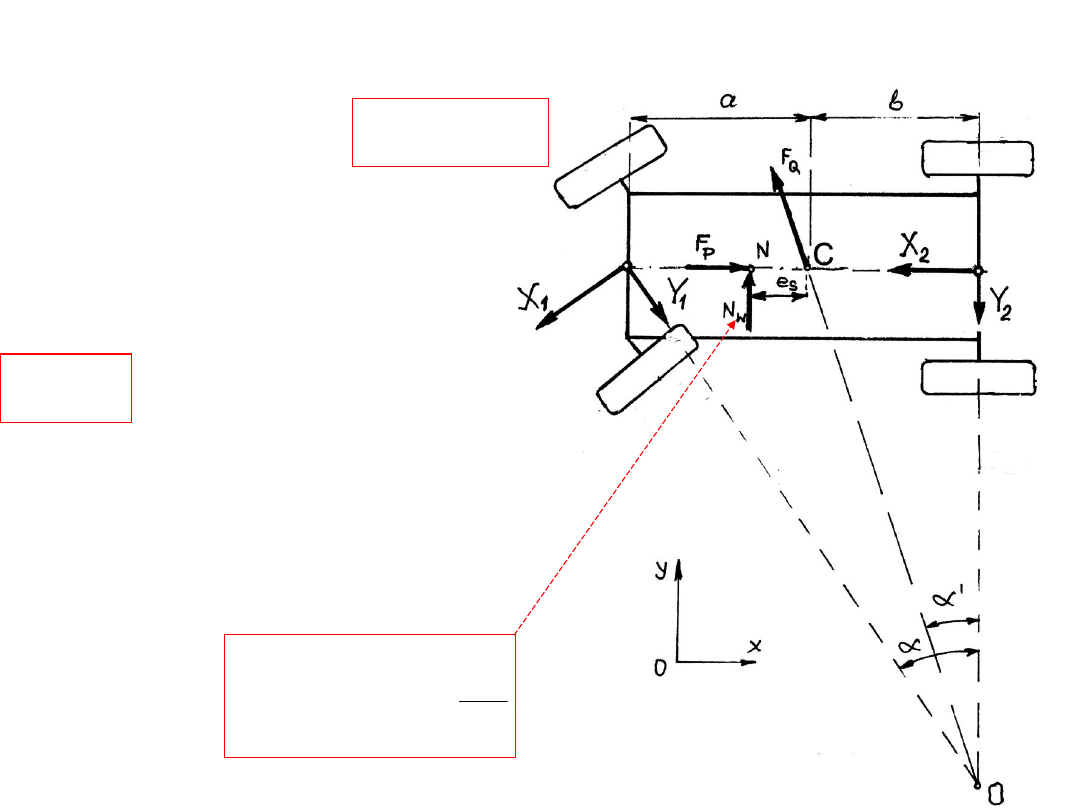
Prędkość jazdy na łuku drogi, cd
2
2
Y
Y
Y
W
v
A
c
N
1
X
2
X
Reakcje obwodowe
i
są równe oddziaływaniom sił
oporu toczenia, sił napędowych
lub hamowania.
Reakcje boczne na
kołach
równoważą
działanie sił bocznych
od samochodu, np.
napór wiatru bocznego,
odśrodkowa siła
bezwładności na łuku
drogi.
2
1
,Y
Y
Prędkość jazdy na łuku drogi, cd2
Równania równowagi
sin
cos
cos
1
2
1
X
N
F
Y
Y
W
Q
sin
sin
cos
1
2
1
Y
F
F
X
X
Q
P
sin
cos
1
2
1
a
X
e
N
b
Y
a
Y
S
W
Rozwiązanie pozwala obliczać prędkość, której
przekroczenie powoduje zarzucenie pojazdu na łuku o
promieniu R. Dalej rozważono jazdę po łuku drogi o
dużym promieniu. Wówczas można przyjmować
0
,
1
n
si
s
co
0
oraz
Y
Y
F
N
X
X
F
Ya Y b N e
Q
W
P
W S
1
2
1
2
1
2
Po podstawieniach,
otrzymano
Prędkość, przy której nastąpi zarzucenie
pojazdu; ściślej, zarzucenie i-tej osi kół
samochodu
Wiadomo, że na każdej osi jezdnej
musi być spełniony warunek
przyczepności
i
i
i
Z
Y
X
2
2
Stan graniczny opisuje
równość
i
i
i
Z
Y
X
2
2
2
2
2
,
i
i
MAX
i
i
X
Z
Y
Y
Z tego obliczono
Zależność tę podstawiono do pierwszego równania z
układu i otrzymano
W
Q
N
F
X
Z
X
Z
2
2
2
2
2
2
1
2
1
2
To pozwala wyznaczyć prędkość graniczną
GR
v
przekroczenie spowoduje zarzucenie samochodu
w ruchu krzywoliniowym
,
której
Prędkość, przy której nastąpi
zarzucenie pojazdu, cd
Przypadek 1. Ruch swobodny samochodu, czyli jazda bez
napędzania i hamowania kół, bez oddziaływania wiatru
bocznego.
X
F
X
F
N
T
T
W
1
1
2
2
0
0
0
,
,
Zatem
Podstawiając powyższe, otrzymano
gR
Q
F
Z
Z
Q
2
2
1
v
)
(
2
1
Z
Z
gR
Q
Q
2
v
Czyli
gR
GR
v
v
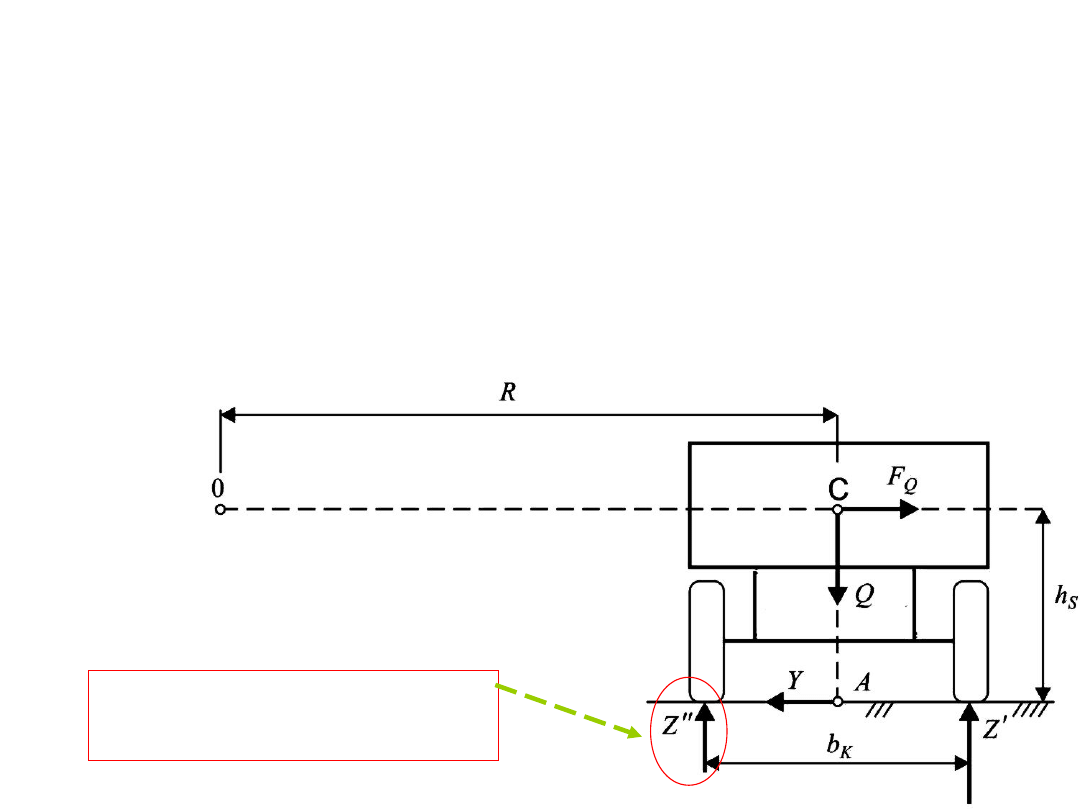
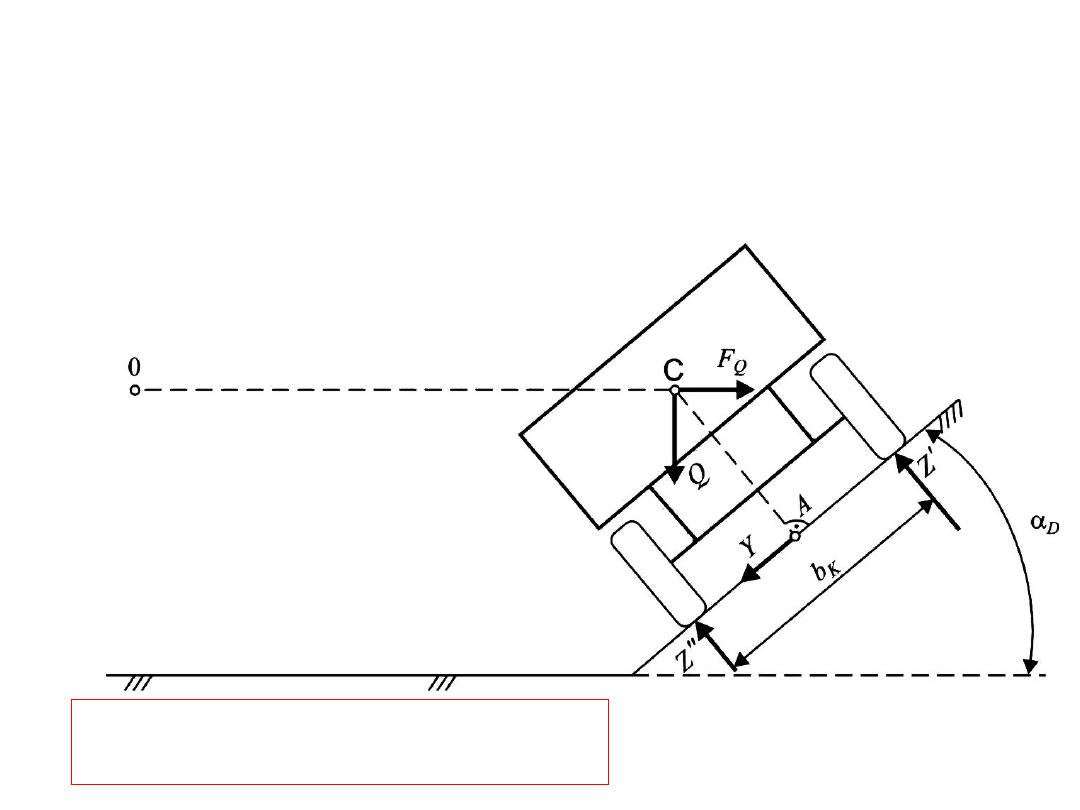
Wywrócenie pojazdu. Obliczenie
prędkości maksymalnej na łuku drogi
Wywrócenie pojazdu może nastąpić po uprzednim
zarzuceniu, ale także bez wcześniejszego zarzucenia.
Przyczyną wywrócenia się pojazdu na łuku drogi może być
działanie sił odśrodkowych, napór wiatru bocznego,
uderzenie boczne (kolizja) lub oddziaływanie nierówności
o znacznej wysokości.
Proces
wywracania
Z
Z
Z
1
2
0
''
''
''
Wywrócenie pojazdu. Obliczenie
prędkości maksymalnej na łuku drogi,
cd
Suma momentów sił działających na pojazd, obliczona
względem punktu A, wynosi
0
2
)
(
2
)
(
2
1
2
1
K
K
S
Q
b
Z
Z
b
Z
Z
h
F
F
Q
Z
1
''
Z
2
''
Proces wywracania się pojazdu pod działaniem siły
jest sygnalizowany zbliżaniem się do zera wartości
i
na kołach wewnętrznych
Stąd w chwili wywracania cały ciężar pojazdu opiera się
na kołach zewnętrznych
Z
Z
Z
Q
1
2
'
'
'
F h
Q
b
Q S
K
2
0
Uwzględniając to, otrzymano
Wywrócenie pojazdu. Obliczenie
prędkości maksymalnej na łuku drogi,
cd 2
Z powyższych zależności otrzymano
2
2
K
S
b
Q
h
R
v
g
Q
v
2
2
b Rg
h
K
S
Zatem wartość maksymalna prędkości jazdy, której
przekroczenie może spowodować wywrócenie się
samochodu na łuku drogi, wynosi
S
K
MAX
h
gR
b
2
v
Stałym dążeniem
konstruktorów jest
utrzymanie relacji
v
v
MAX
GR
Wpływ nachylenia łuku drogi na
prędkość maksymalną
Równania, wynikające z sumy rzutów sił na kierunek
równoległy i prostopadły do nawierzchni, są następujące
F
Q
Y
Q
D
D
cos
sin
Z
Z
Q
F
D
D
Q
cos
sin
Wartość reakcji bocznej
jest ograniczona
przyczepnością kół do
drogi i wynosi
)
(
Z
Z
F
Y
MAX
Wpływ nachylenia łuku drogi na
prędkość maksymalną, cd2
Z drugiego równania układu
wyznaczono
)
cos
sin
(
D
D
Q
MAX
Q
F
Y
Podstawiając powyższe do pierwszego równania,
mamy
D
D
D
D
Q
gR
Q
Q
gR
Q
cos
sin
v
sin
cos
v
2
2
Stąd obliczono prędkości jazdy, której
przekroczenie spowoduje zarzucenie pojazdu
D
D
tg
tg
gR
1
v
v
GR
Na drodze o
ujemnym kącie
nachylenia podłoża
D
0
tg
D
0
i

Ruch na łuku drogi.
Mechanika działania ESP

Podstawy pomiarów sygnałów do
sterownika
Układ stabilizacji toru jazdy (ESP-Electronic Stability Program,
VSC-Vehicle Stability Control) jest systemem wspomagania
kierowcy. Korygujące oddziaływanie systemu ma na celu
utrzymanie zgodności toru jazdy zadanego przez kierowcę z
rzeczywistym torem ruchu pojazdu. Pojawienie się różnicy
pomiędzy zamierzeniem kierowcy a rzeczywistym ruchem
pojazdu powoduje uruchomienie działania sterownika ESP.
Celem tych działań jest wywołanie sił, a w konsekwencji
powstanie momentu obracającego (momentu stabilizującego)
pojazd w takim kierunku, który spowoduje zmniejszenie
odchylenia jego toru ruchu od zadanego.
Zmniejszenie sił napędowych prowadzi do zwiększenia
dysponowanej siły przyczepności bocznej na osi napędowej. To
zmniejsza tendencje do zarzucania pojazdu. Czasami
wykorzystuje się przyrost siły hamowania, w sytuacji, gdy siły
zadane przez kierowcę jeszcze nie wyczerpują całkowicie
przyczepności kół.
Podstawy pomiarów sygnałów do
sterownika
(t)
ε
ε
dt
d
t
)
(
Y
a
Podstawą do działania ESP są sygnały wykorzystywane przy sterowaniu
ABS i ASR oraz rezultaty pomiarów następujących wielkości:
-prędkość kątowa
obracania się pojazdu wokół osi pionowej jako
pochodna kąta obrotu;
obliczamy pochodną,
czyli
-przyspieszenie poprzeczne (dośrodkowe) mierzymy ;
Wielkości pomierzone stanowią podstawę do wyznaczenia
toru ruchu pojazdu.
Jest to rzeczywisty tor jazdy
v
a
Y
,
,
Analiza toru ruchu, zadanego przez
kierowcę
Analizując zamiar kierowcy, w systemie stabilizacji prowadzony
jest ciągły pomiar v (prędkość jazdy) i
K
.
Wykorzystując to, wyznacza się
dt
d
t
)
(
Na tej podstawie procesor w sterowniku oblicza
v
R
*
v
a
Y
i
Y
Qi
Yi
m
a
F
F
Następnie oblicza siły bezwładności (odśrodkowe) na łuku drogi,
Yi
Yi
i
k
F
oraz kąty znoszenia kół i – tej osi jezdnej;
1
2
*
*
tg
L
R
W rezultacie procesu iteracji
wyznaczamy nową wartość
promienia toru zadanego
przez kierowcę
Analiza toru ruchu, zadanego przez
kierowcę, cd
Wykorzystując ten wynik, obliczamy nowe wartości
*
*
R
v
v
a
Y
które dokładniej niż poprzednio opisują zadany przez kierowcę tor jazdy.
)
(t
)
(t
a
a
Y
Y
Y
a
i
Rezultaty obliczeń parametrów opisujących tor jazdy, zadany
przez kierowcę (zamierzony tor jazdy),
wykonywanych w
procesorze sterownika
należy porównać z wynikami pomiarów
wielkości charakteryzujących rzeczywisty tor ruchu pojazdu
.

Działanie sterownika
Y
Y
Y
a
a
a
Obliczone w procesorze sterownika różnice między
wartościami obliczonymi oraz pomierzonymi z toru ruchu
samochodu, czyli
Y
a
mogą stanowić podstawę do uruchomienia układu ESP. Jeśli
wartości różnic
przekroczą zadane w systemie wartości progowe, to sterownik
ESP uruchamia proces przyhamowywania kół samochodu w
sposób wynikający z pokazanych dalej rysunków. Wybór
przyhamowywanego koła zależy od wyników pomiarów z
czujników umieszczonych w samochodzie.
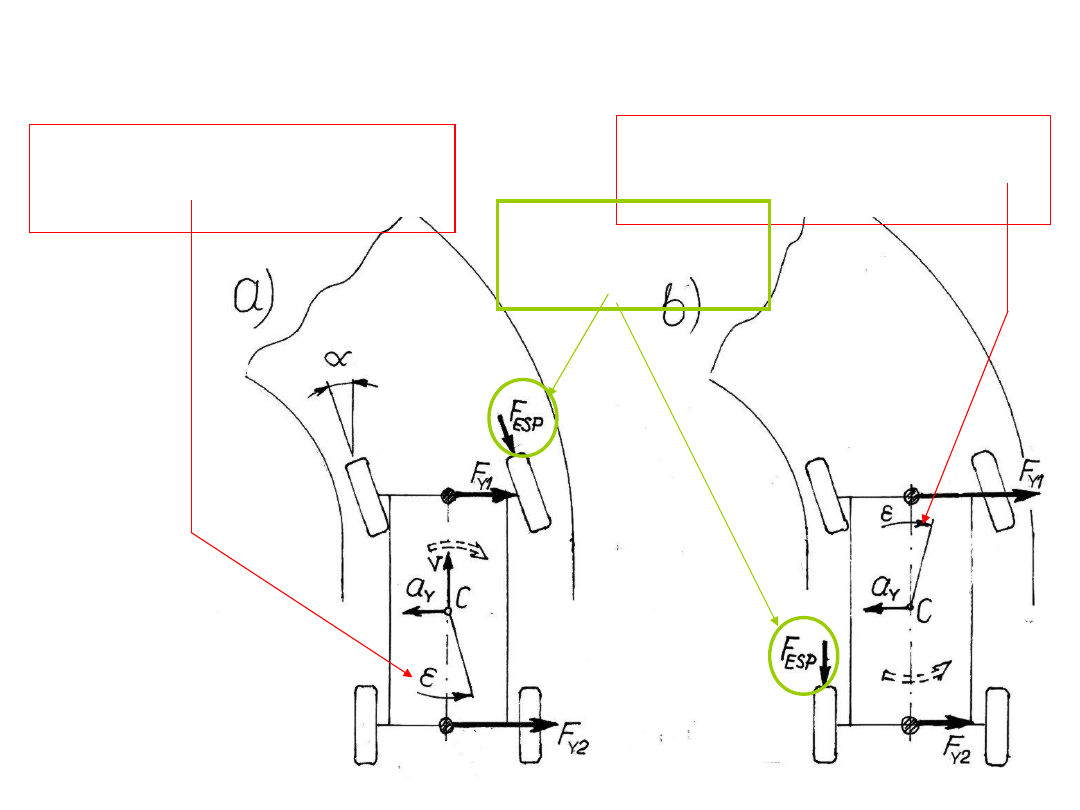
Działanie ESP podczas skrętu w lewo
Nadmierny poślizg lub
znoszenie osi tylnej, czyli
nadsterowność
Nadmierny poślizg lub
znoszenie osi przedniej, czyli
podsterowność
Wprowadzone siły
przyhamowania
kół
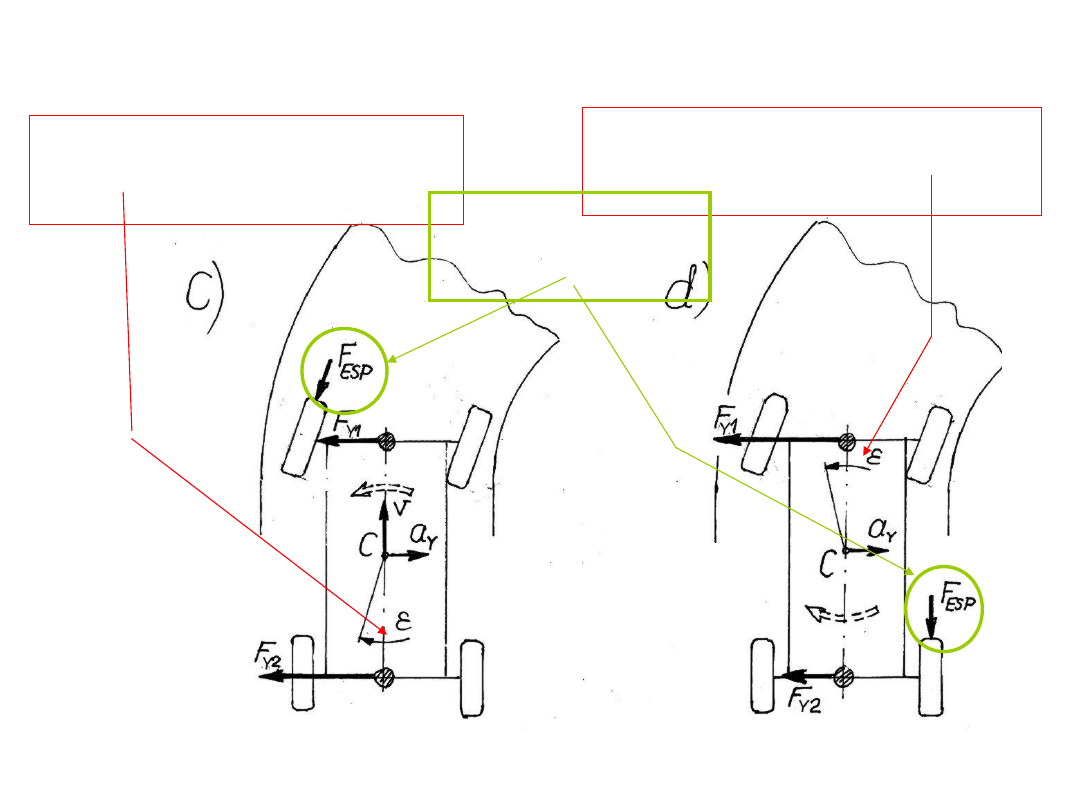
Działanie ESP podczas skrętu w prawo
Nadmierny poślizg lub
znoszenie osi tylnej,
nadsterowność
Nadmierny poślizg lub
znoszenie osi przedniej,
podsterowność
Wprowadzone siły
przyhamowania
kół
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
Wyszukiwarka
Podobne podstrony:
Wykład Diag 8 Stateczność
Wykład Diag 5 Energochłonność ruchu
Sem 2. Wykład, Całki Krzywoliniowe
wyklad 7 (regresja krzywoliniowa), Zarządzanie I semestr -> UG, Statystyka
Wykład Diag 3 Ruch prostoliniowy
Wykład Diag 1 i 2 Wstęp Mechanika koła
Wykład Diag 6 Hamowanie
Wykład Diag Dodat Wibroizolacja drgań
Wykład Diag 8 Stateczność
Wykład Diag 4 Rozpędzanie sam
DIAG.WYBRNYCH SCHORZEŃ--14, Wykłady-Ronikier
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
więcej podobnych podstron