TRYGONOMETRIA
TRYGONOMETRIA
SFERYCZNA
SFERYCZNA
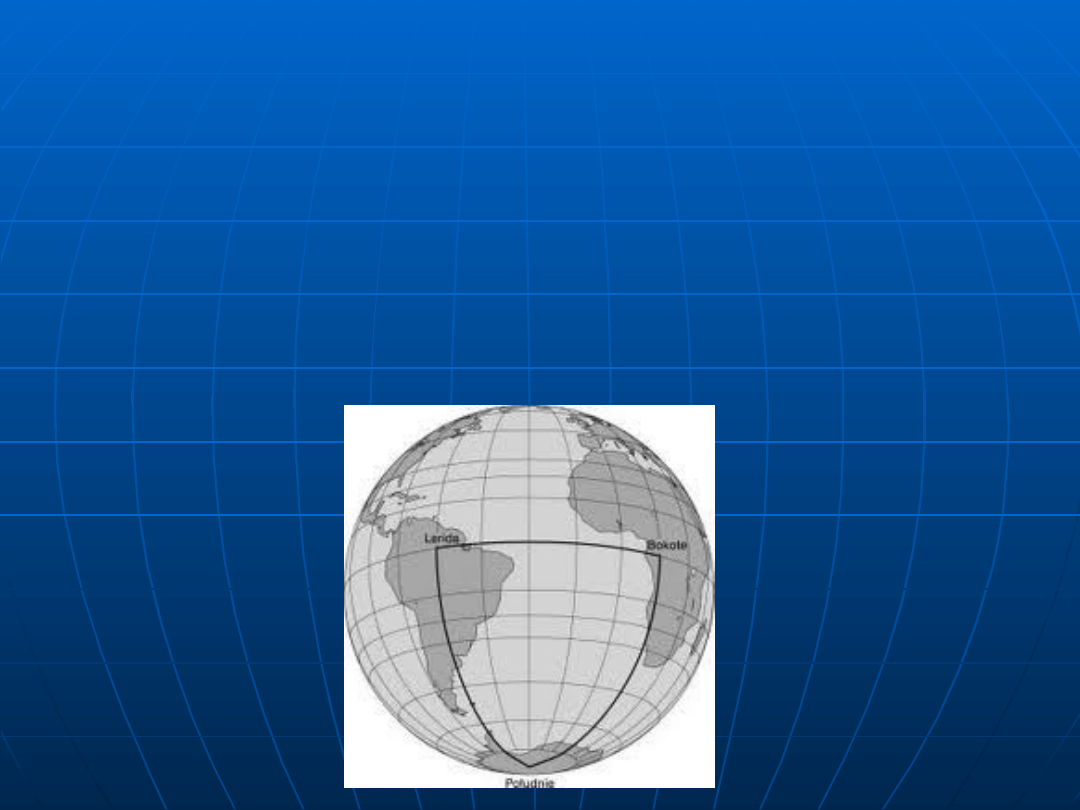
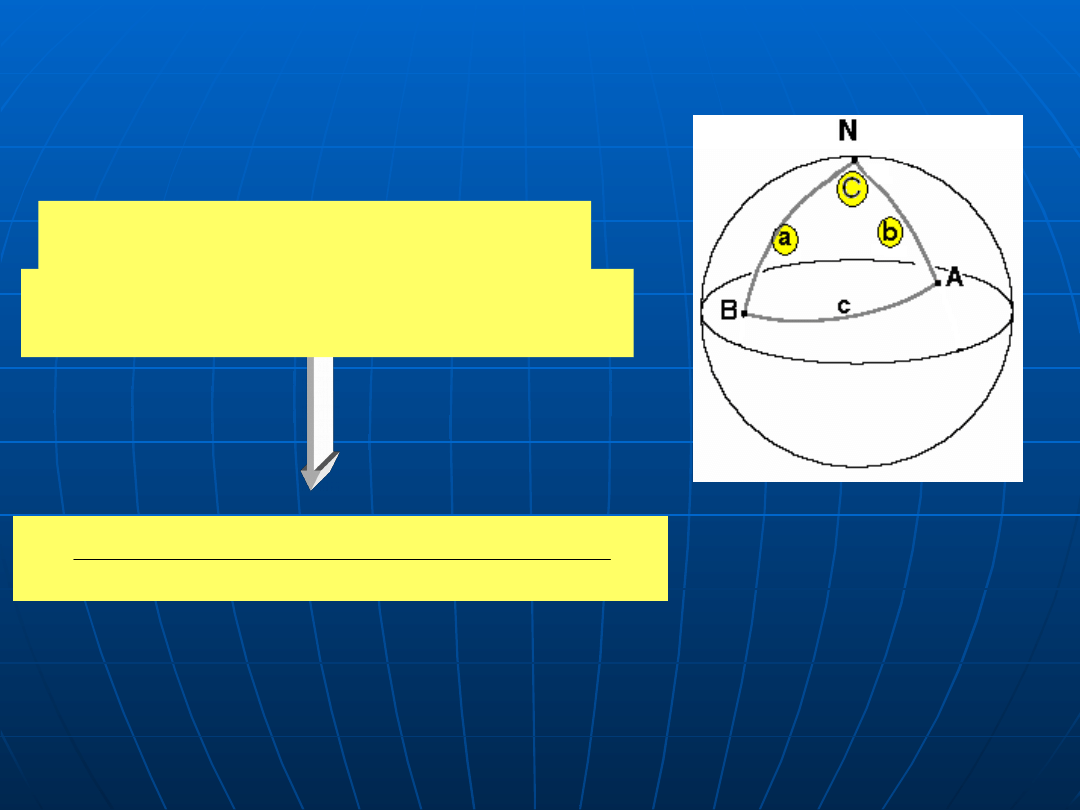
ORTODROMA I JEJ ELEMENTY
ORTODROMA I JEJ ELEMENTY
Dysponując współrzędnymi sferycznymi punktów
Dysponując współrzędnymi sferycznymi punktów
A
A
(
(
λ
λ
A
A
,
,
φ
φ
A
A
)
)
i
i
B
B
(
(
λ
λ
B
B
,
,
φ
φ
B
B
)
)
na powierzchni Ziemi, możemy obliczyć ich wzajemne odległości:
na powierzchni Ziemi, możemy obliczyć ich wzajemne odległości:
kątową i liniową.
kątową i liniową.
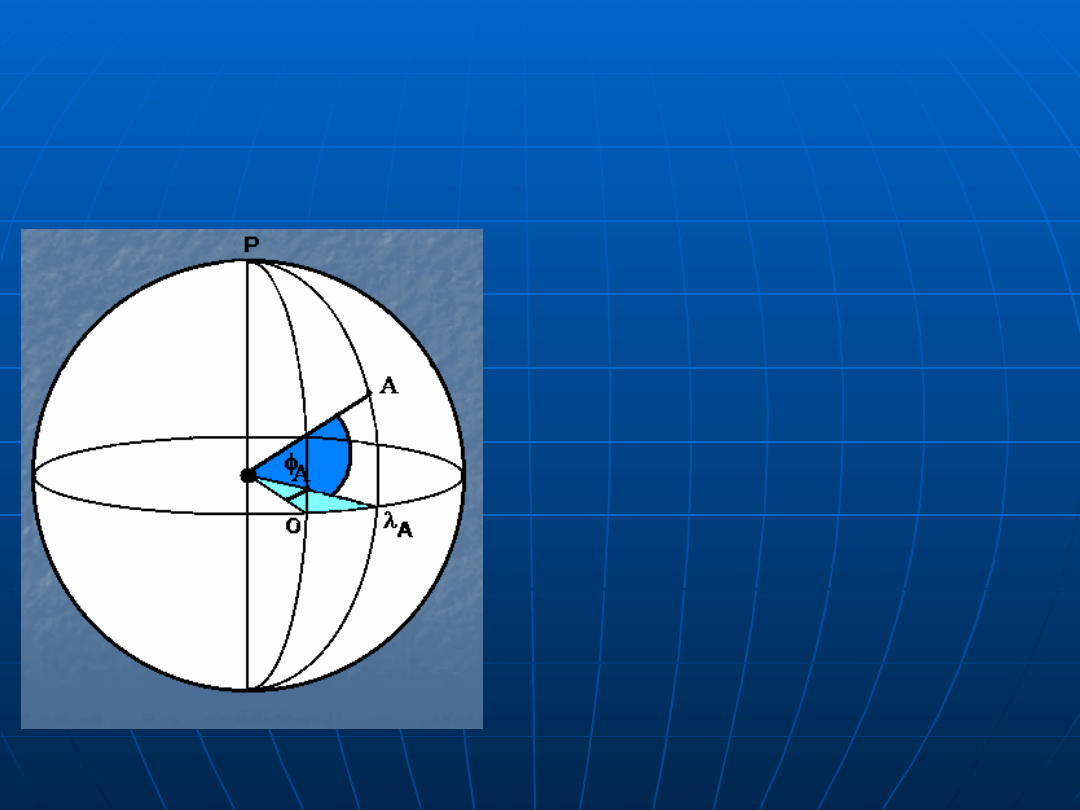
WSPÓŁRZĘDNE NA SFERZE
WSPÓŁRZĘDNE NA SFERZE
We
wzorach
korzystamy
z
konwencji w myśl której
szerokość
południowa
i
długość zachodnia
zapisywane są we wzorach jako
liczby ujemne.
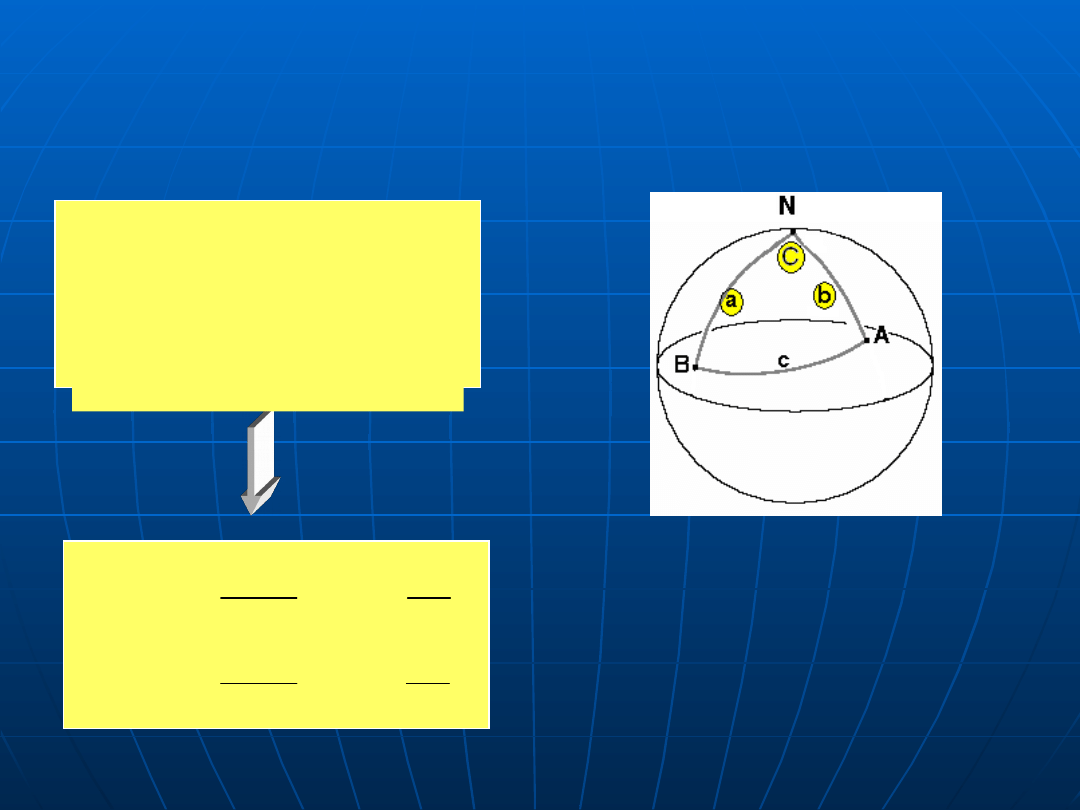
Elementy
dane
Elementy
szukane
a = 90
0
–
φ
B
A
b = 90
0
–
φ
A
B
C = |Δλ|
d (bok c)
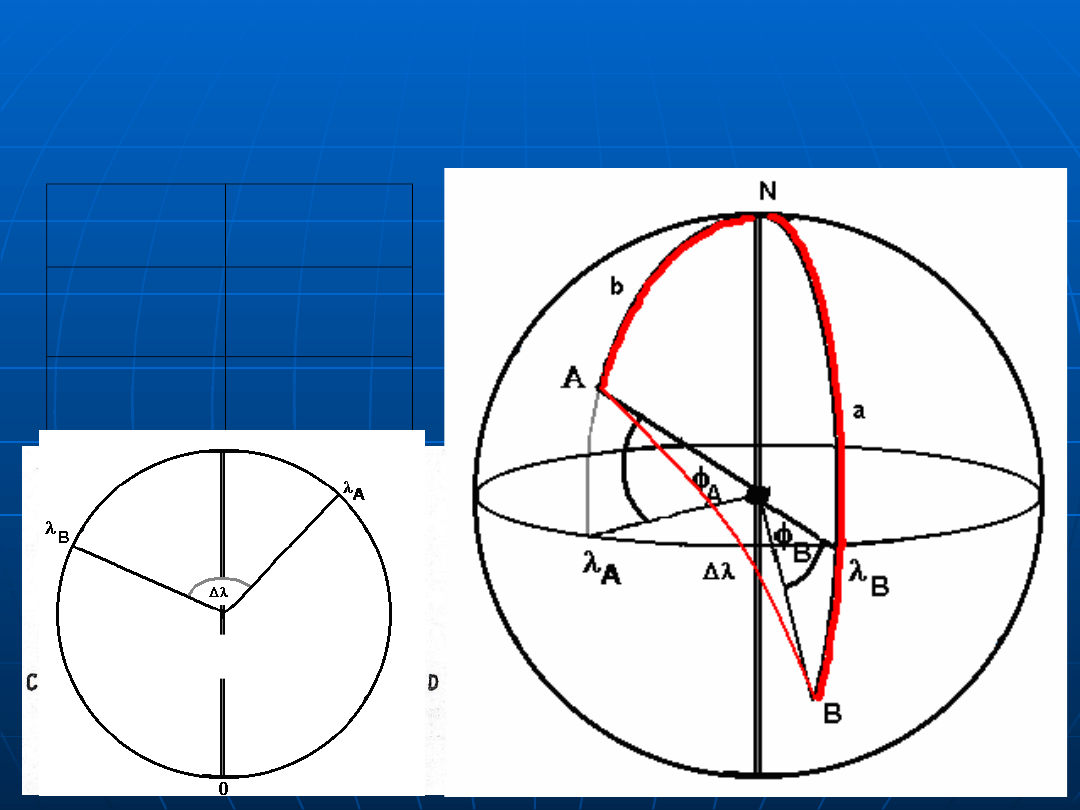
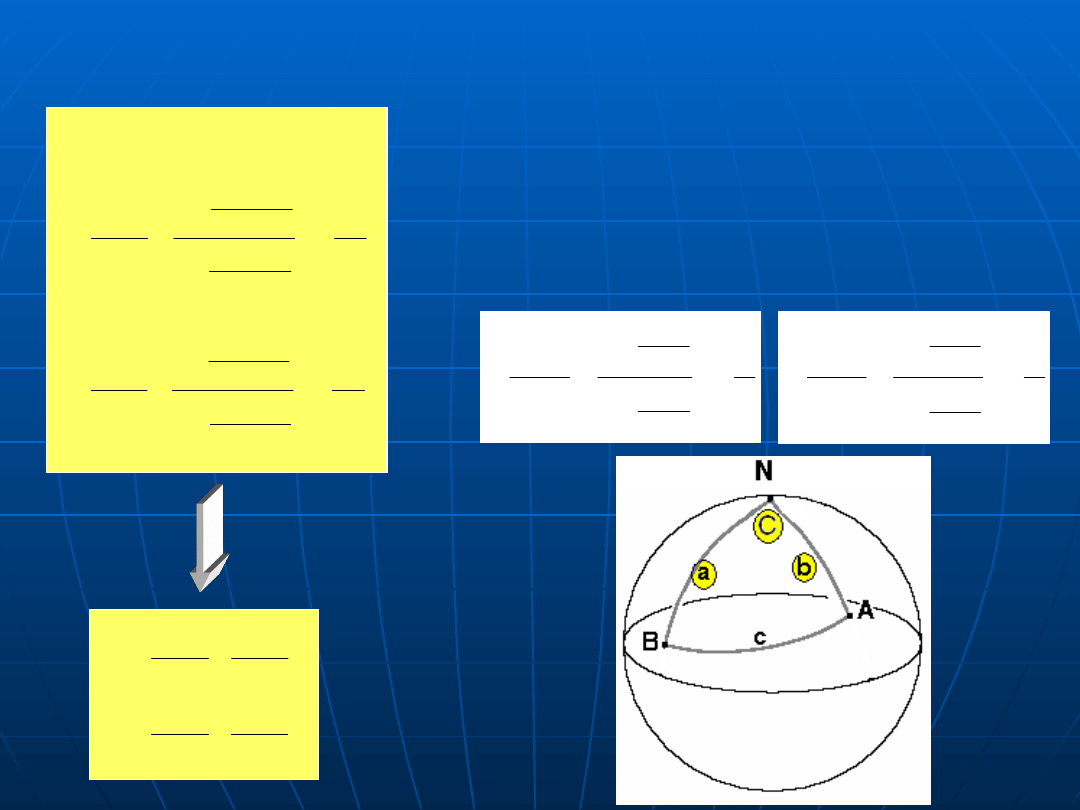
TRÓJKĄT PODSTAWOWY - ELEMENTY
TRÓJKĄT PODSTAWOWY - ELEMENTY
W przypadku
W przypadku
obliczeń nawigacyjnych
obliczeń nawigacyjnych
wykorzystujemy trójkąt
wykorzystujemy trójkąt
podstawowy
podstawowy
ABN
ABN
w którym dane są dwa boki (
w którym dane są dwa boki (
a
a
,
,
b
b
) i kąt zawarty
) i kąt zawarty
pomiędzy nimi (
pomiędzy nimi (
C
C
= |
= |
|
|
).
).
Δλ = λ
B
− λ
A
Gdy |Δλ| >
180º
C = 360º
−
|
Δλ|
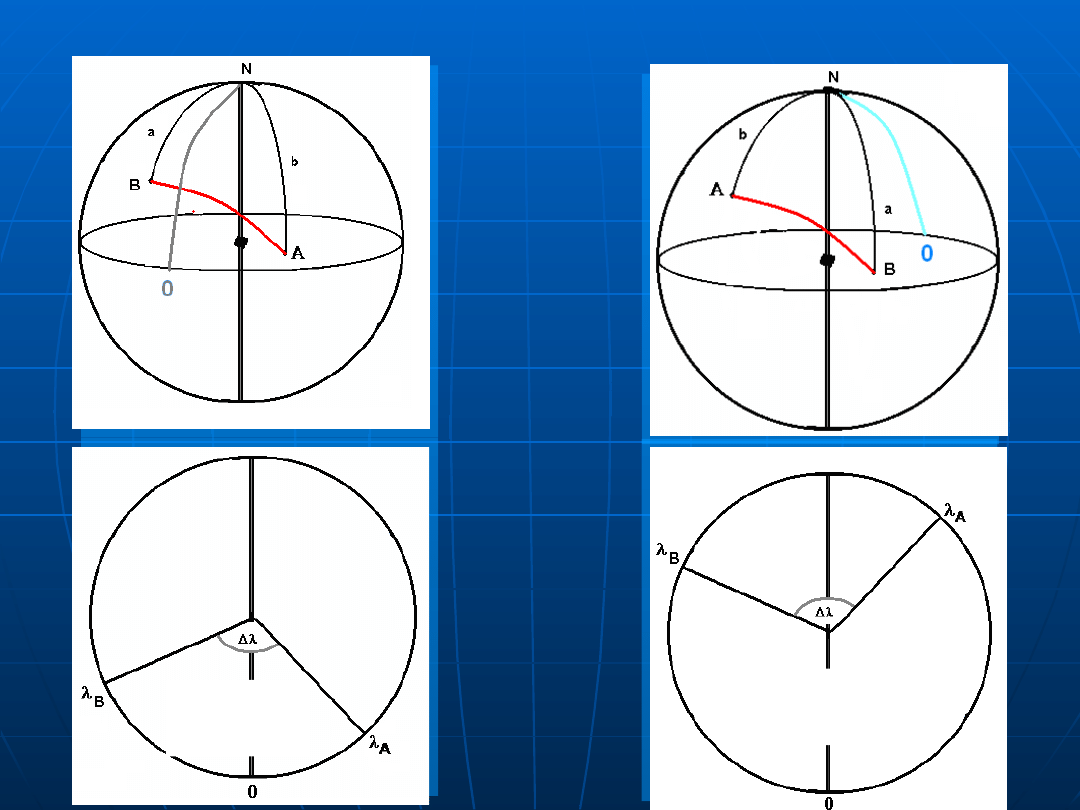
Trójkąt podstawowy - elementy
Trójkąt podstawowy - elementy
C = |λ
B
−
λ
A
|
C = 360º − |λ
B
− λ
A
|
Twierdzenie cosinusów
Twierdzenie cosinusów
cos c = cos b cos a + sin b sin a
cos C
ODLEGŁOŚĆ ORTODROMICZNA – TRZECI BOK
ODLEGŁOŚĆ ORTODROMICZNA – TRZECI BOK
cos d = sin φ
A
sin φ
B
+ cos φ
A
cos φ
B
cos Δλ
60
180
)
cos
sin
cos
arccos(
C
a
inb
s
a
osb
c
d
Mm
Twierdzenie sinusów
sin A / sin a = sin C /sin
c
sin B / sin b = sin C /sin
c
180
)
sin(
sin
)
sin(
arcsin
a
c
C
A
180
)
sin(
sin
)
sin(
arcsin
b
c
C
B
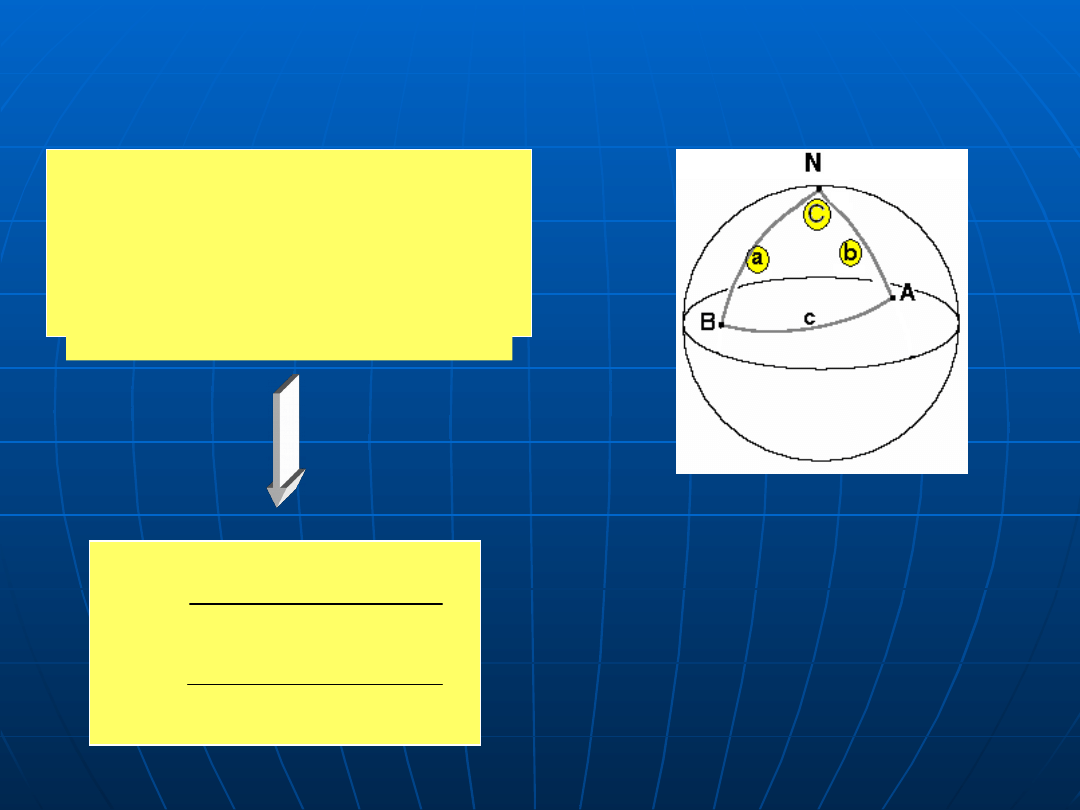
Aby znaleźć
Aby znaleźć
początkowy i końcowy kąt drogi
początkowy i końcowy kąt drogi
po ortodromie, należy
po ortodromie, należy
znaleźć kąty
znaleźć kąty
A
A
i
i
B
B
trójkąta podstawowego
trójkąta podstawowego
ABN
ABN
.
.
KĄT POCZĄTKOWY I KOŃCOWY DROGI – KĄTY I
KĄT POCZĄTKOWY I KOŃCOWY DROGI – KĄTY I
UWAGA:
Mankamentem
stosowania
twierdzenia
sinusów
jest
konieczność wyboru jednej z dwóch
odpowiedzi.
Analogie Nepera
2
2
sin
2
cos
2
ctg
B
A
tg
B
A
B
A
2
2
cos
2
sin
2
ctg
B
A
tg
B
A
B
A
2
2
B
A
B
A
A
2
2
B
A
B
A
B
KĄT POCZĄTKOWY I KOŃCOWY DROGI – KĄTY II
KĄT POCZĄTKOWY I KOŃCOWY DROGI – KĄTY II
UWAGI:
Wygodniej jest skorzystać z analogii Nepera
lub twierdzenia cotangensów.
Możemy skorzystać z twierdzenia cosinusów
dla kątów aby wybrać właściwą odpowiedź.
2
2
cos
2
cos
2
C
ctg
b
a
b
a
B
A
tg
2
2
sin
2
sin
2
C
ctg
b
a
b
a
B
A
tg
Twierdzenie cotangensów
sinb ctga – sinC ctgA =
cosb cosC
sina ctgb – sinC ctgB =
cosa cosC
C
C
b
ctga
b
ctgA
sin
cos
cos
sin
C
C
a
ctgb
a
ctgB
sin
cos
cos
sin
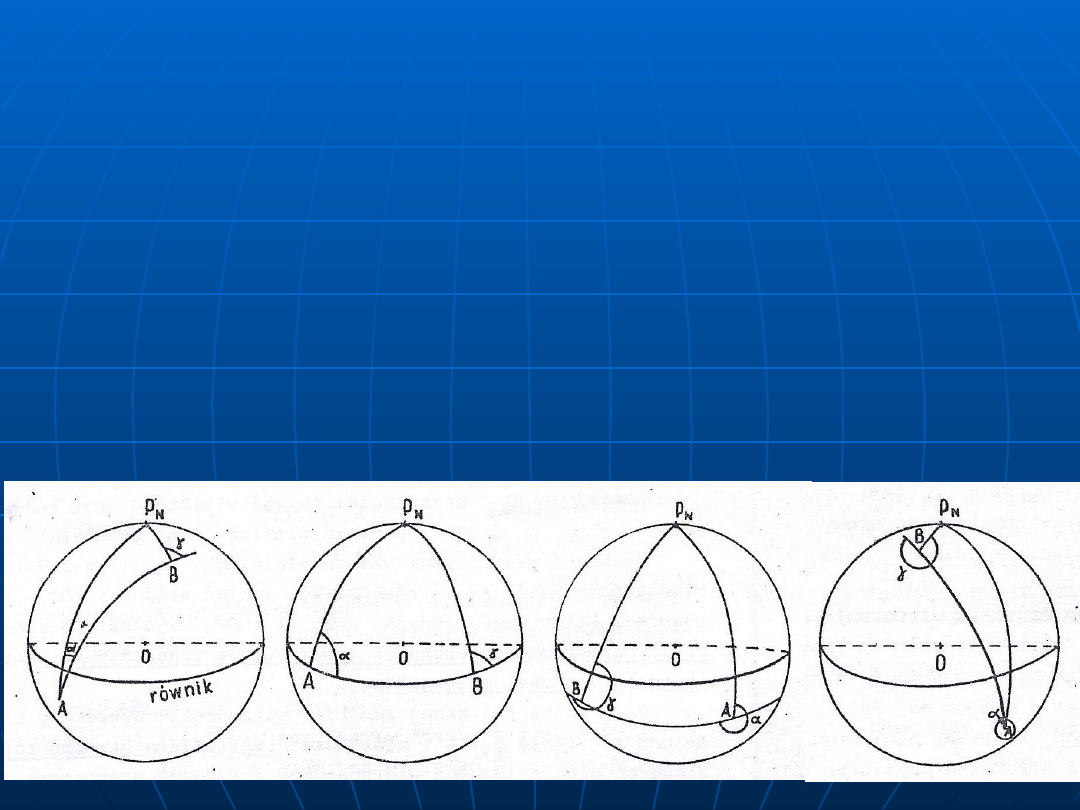
KĄT POCZĄTKOWY I KOŃCOWY DROGI – KĄTY III
KĄT POCZĄTKOWY I KOŃCOWY DROGI – KĄTY III

DEFINICJA 1.
DEFINICJA 1.
Początkowym kątem drogi
Początkowym kątem drogi
po ortodromie
po ortodromie
AB
AB
nazywamy kąt dodatni, którego początkowym ramieniem jest
nazywamy kąt dodatni, którego początkowym ramieniem jest
część południka łączącego punkt
część południka łączącego punkt
A
A
z biegunem północnym, a
z biegunem północnym, a
końcowym − ortodroma
końcowym − ortodroma
AB
AB
.
.
Końcowym kątem drogi
Końcowym kątem drogi
po ortodromie
po ortodromie
AB
AB
nazywamy kąt dodatni,
nazywamy kąt dodatni,
którego początkowym ramieniem jest część południka łączącego
którego początkowym ramieniem jest część południka łączącego
punkt
punkt
B
B
z biegunem północnym, a końcowym − przedłużenie
z biegunem północnym, a końcowym − przedłużenie
ortodromy poza punkt
ortodromy poza punkt
B
B
.
.
KĄT POCZĄTKOWY I KOŃCOWY
KĄT POCZĄTKOWY I KOŃCOWY
DROGI PO ORTODROMIE
DROGI PO ORTODROMIE
Obrotem dodatnim
Obrotem dodatnim
(a tym samym kątem dodatnim) nazywamy
(a tym samym kątem dodatnim) nazywamy
obrót zgodny z ruchem wskazówek zegara.
obrót zgodny z ruchem wskazówek zegara.
Kursem nazywamy kąt dodatni
Kursem nazywamy kąt dodatni
leżący na płaszczyźnie stycznej do
leżący na płaszczyźnie stycznej do
powierzchni Ziemi, którego wierzchołkiem jest obserwator O
powierzchni Ziemi, którego wierzchołkiem jest obserwator O
traktowany jako punkt, początkowym ramieniem jest półprosta
traktowany jako punkt, początkowym ramieniem jest półprosta
ON, biegnąca w kierunku geograficznego bieguna północnego, a
ON, biegnąca w kierunku geograficznego bieguna północnego, a
końcowym półprosta OD, zgodnie równoległa do wektora RD,
końcowym półprosta OD, zgodnie równoległa do wektora RD,
wyznaczonego przez rufę R i dziób D statku na jego podłużnej osi
wyznaczonego przez rufę R i dziób D statku na jego podłużnej osi
symetrii.
symetrii.
DEFINICJA 1.
DEFINICJA 1.
Początkowym kątem drogi
Początkowym kątem drogi
(ozn.
(ozn.
α
α
)
)
po ortodromie
po ortodromie
AB
AB
nazywamy kąt dodatni, którego początkowym ramieniem jest
nazywamy kąt dodatni, którego początkowym ramieniem jest
część południka łączącego punkt
część południka łączącego punkt
A
A
z biegunem północnym, a
z biegunem północnym, a
końcowym − ortodroma
końcowym − ortodroma
AB
AB
.
.
Końcowym kątem drogi
Końcowym kątem drogi
(ozn.
(ozn.
β
β
lub
lub
γ
γ
)
)
po ortodromie
po ortodromie
AB
AB
nazywamy
nazywamy
kąt dodatni, którego początkowym ramieniem jest część południka
kąt dodatni, którego początkowym ramieniem jest część południka
łączącego punkt
łączącego punkt
B
B
z biegunem północnym, a końcowym −
z biegunem północnym, a końcowym −
przedłużenie ortodromy poza punkt
przedłużenie ortodromy poza punkt
B
B
.
.
KĄT POCZĄTKOWY I KOŃCOWY
KĄT POCZĄTKOWY I KOŃCOWY
DROGI PO ORTODROMIE
DROGI PO ORTODROMIE
Document Outline
Wyszukiwarka
Podobne podstrony:
TRYGONOMETRIA SFERYCZNA I
Trygonometria sferyczna ppt
podstawowe wzory trygonometrii sferycznej, Geodezja, studia III rok
Elementy trygonometrii sferycznej, Kartografia matematyczna
Kartografia i trygonometria sferyczna
Trygonometria sferyczna
trygonometria sferyczna
TRYGONOMETRIA SFERYCZNA I
trygonometria 2
45Załamania światła na powierzchni sferycznej
ściąga matma funkcje trygonomertyczne
Obliczenie przewyższeń niwelacja trygonometryczna
Funkcje trygonometryczne dowody
niwelacja trygonometryczna
Zestaw6 trygonometria i własności figur
Zestaw6 trygonometria
funkcje trygonometryczne I, Poziom rozszerzony
więcej podobnych podstron