Geodezyjna obsługa budowy hali
przemysłowej
I.GEODEZYJNA OBSŁUGA INWESTYCJI
•zgłoszenie pracy w Ośrodku Dokumentacji,
•geodezyjne opracowanie projektu,
•założenie osnowy realizacyjnej,
•wytyczenie głównych osi obiektu,
•założenie wysokościowych znaków roboczych,
•przekazanie do Ośrodka powykonawczej
dokumentacji geodezyjno-kartograficznej.
II.Pomiary realizacyjne
•inwentaryzacja stanu zerowego,
•założenie osnowy budowlano-montażowej,
•tyczenie szczegółowe,
•pomiar kontrolny realizowanej konstrukcji,
•inwentaryzacja powykonawcza.
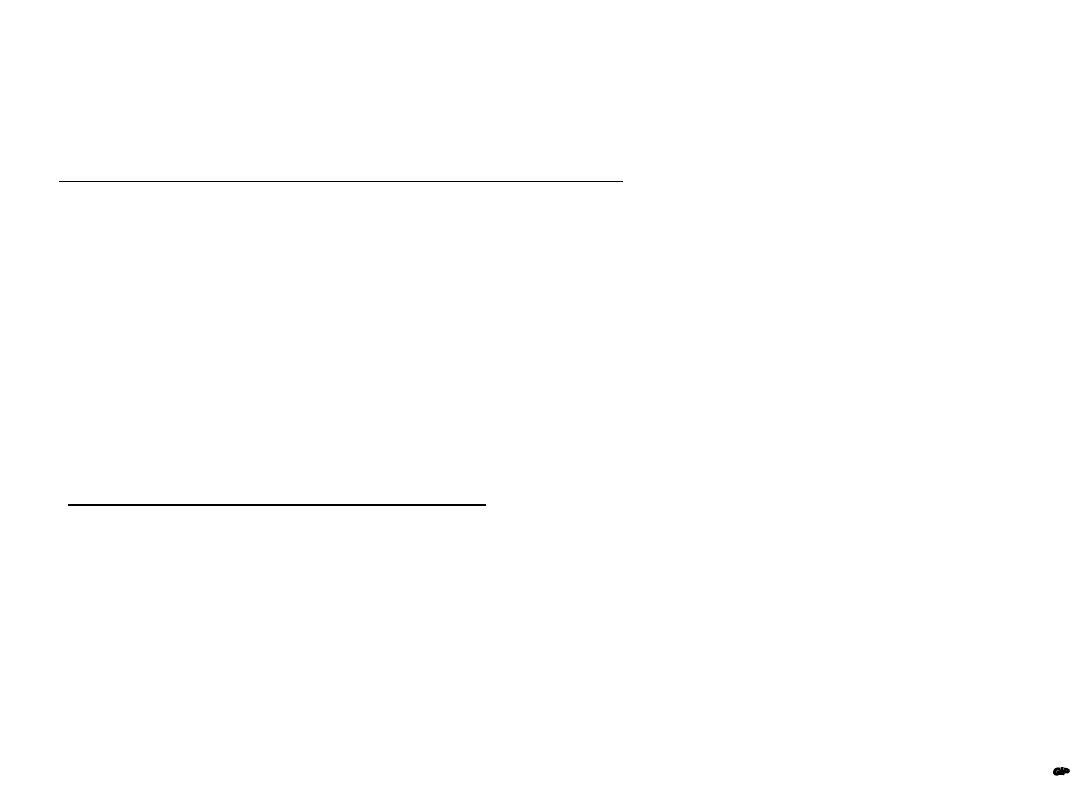
Elementy
konstrukcj
i
4
C
C
4
C
4
C
4
4
C
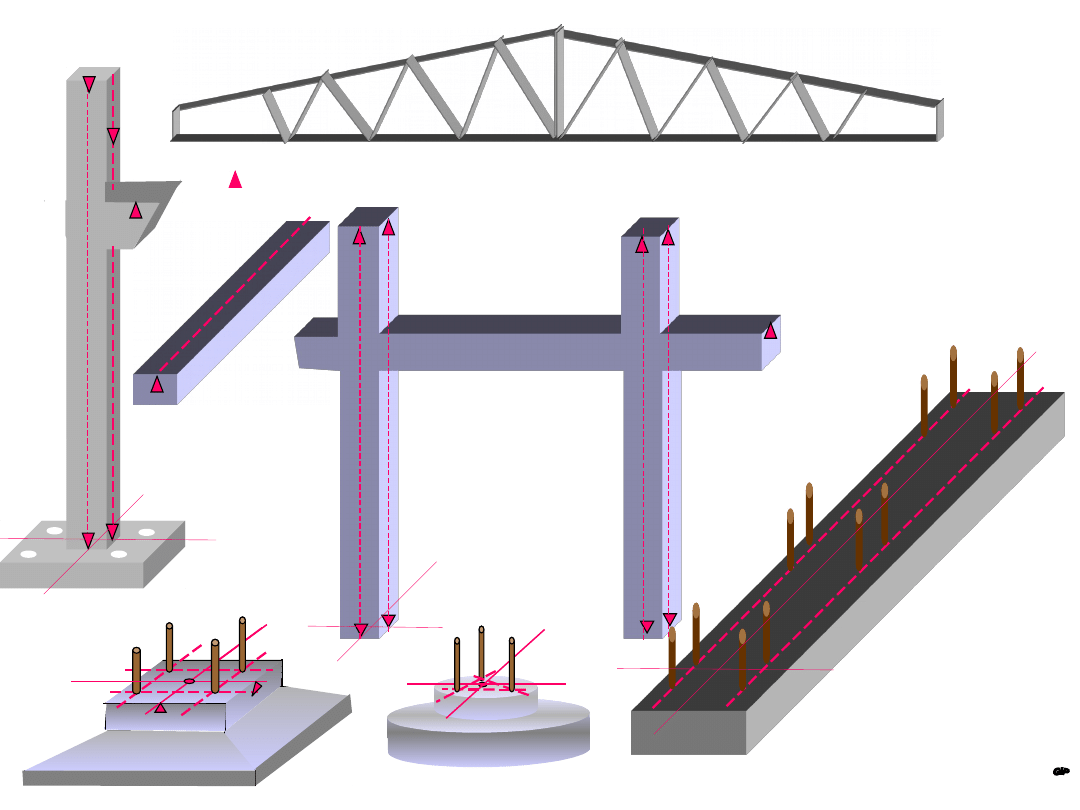
Pomiar kontrolny elementów (1)
L
1
L
d
w
L
L
1
L
1
L
L
2
L
2
1
2
3
4
5
6
d
u
L
l
proj.
d
u
l
proj.
L
Pomiar kontrolny elementów (2)
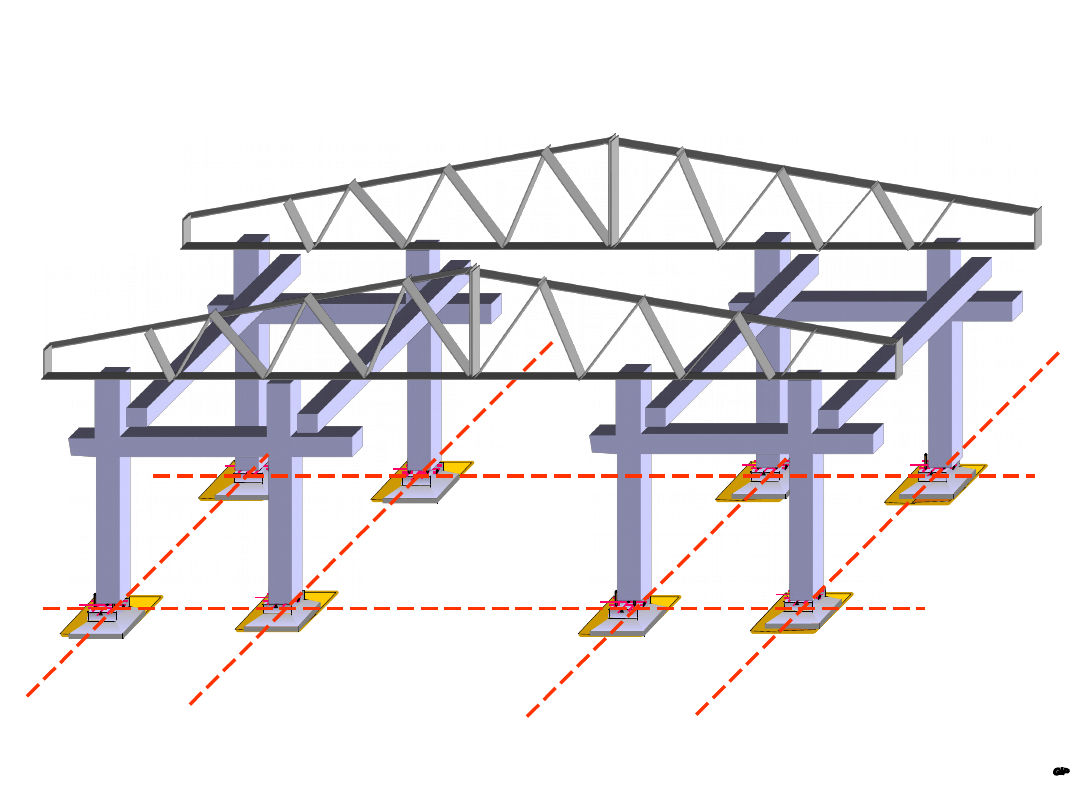
Budujemy halę przemysłową (2)
C
4
C
4
C
4
C
4
C
4
C
4
C
4
C
4
Budujemy halę przemysłową (1)
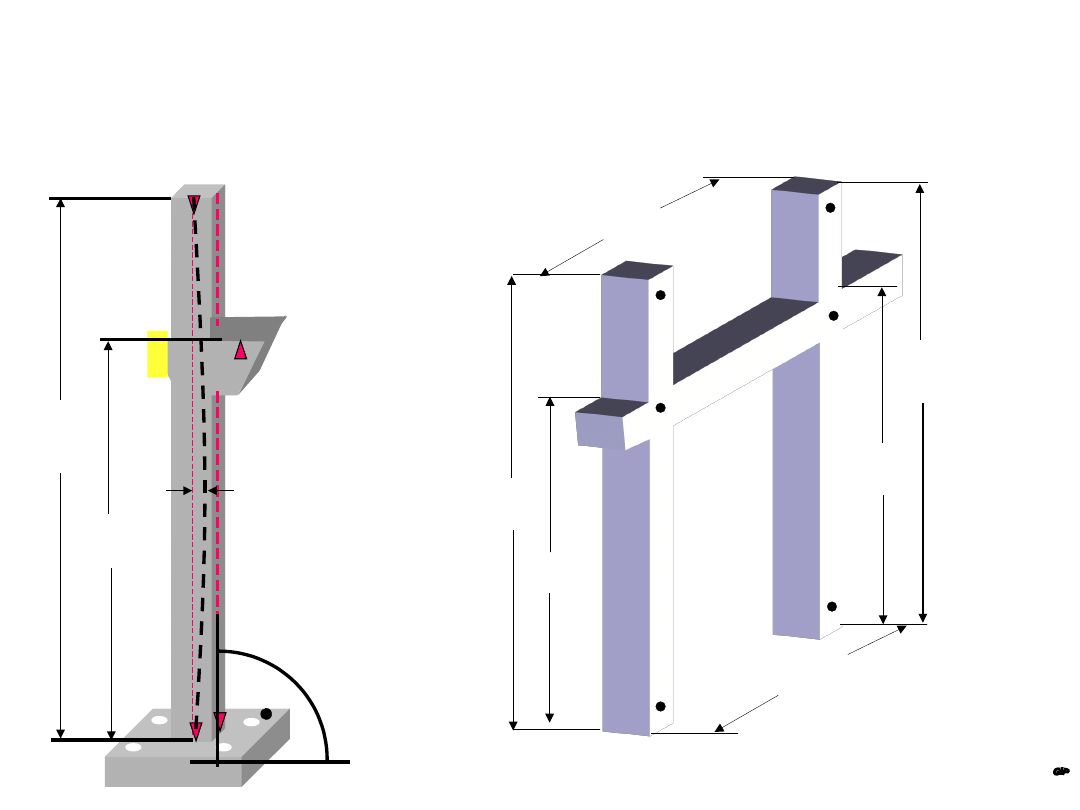
Projektowana dokładność
montażu
Dopuszczalne odchyłki montażu elementów
Konstrukcje żelbetowe
Konstrukcje stalowe
Dopuszczalne odchyłki wymiaru elementów
Konstrukcje żelbetowe
Konstrukcje stalowe
z=20mm
z =10mm
x = 5mm
y = 5mm
p = 5mm
x= 5mm
y= 5mm
p= 10mm dla L< 10m.
1/1000L lecz < 25mm
L=1/1000L lecz< 15mm
L= 6-16mm
u= L
B
/1000
w= H
B
/500
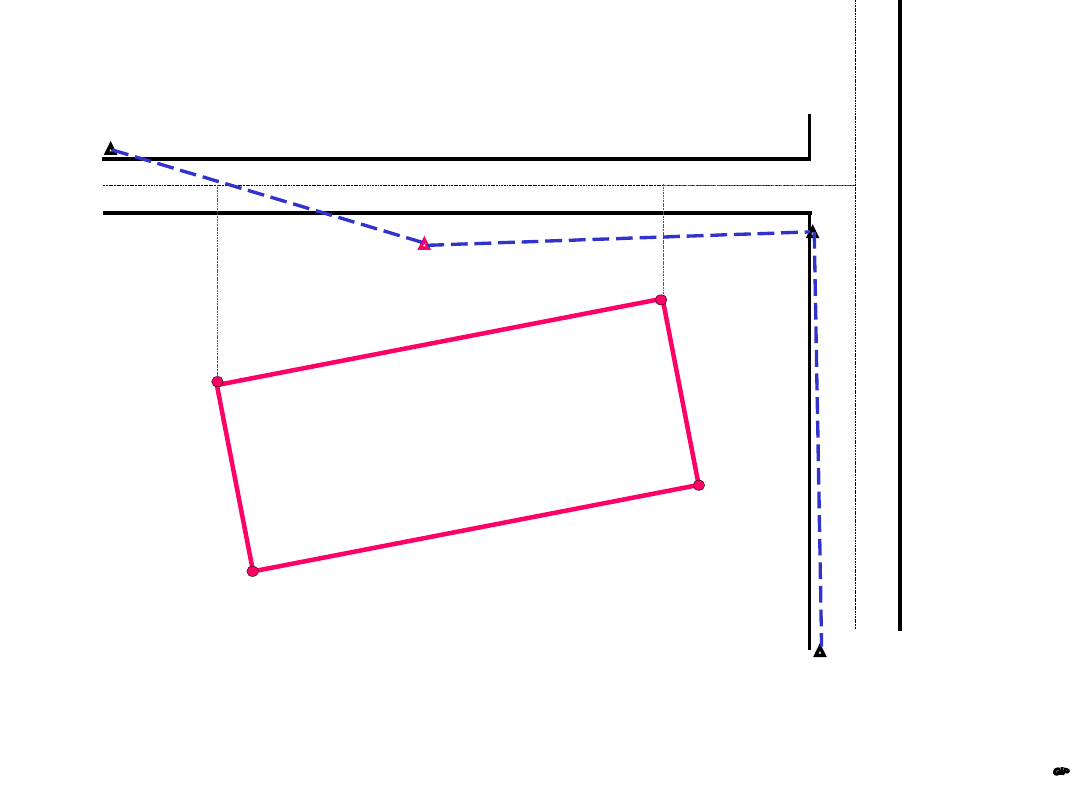
Szkic lokalizacji obiektu
a
1
a
2
a
3
d
2
d
1
P
1
P
2
P
3
P
4
Ul.Długa
U
l
.
S
z
e
r
o
k
a
•wyznaczenie współrzędnych osi ulic w układzie osnowy realizacyjnej,
•obliczenie współrzędnych głównych punktów osiowych,
•wytyczenie głównych punktów osiowych,
•kontrola wytyczenia,
(przykład)
Tyczenie lokalizacyjne (1)
ZADANIE.
Wytyczyć A,B,C,D główne punkty osiowe obiektu
-tyczenie lokalizacyjne tych punktów w oparciu o
osnowę realizacyjną (dokł. 10 cm)
-przyjmujemy tylko punk np.: C jako wyznaczony
ostatecznie i kierunek na p-kt B
-mierzymy kontrolnie obserwacje zaprojektowane
w konstrukcji A, B, C, D z dokładnością
wynikającą z projektu (przeważnie z obserwacjami
nadliczbowymi),
-obliczamy poprawki tyczenia dla punktów A, B, D,
-poprawiamy położenie tych punktów
-wykonujemy ostateczny pomiar kontrolny
A
A
B
C
D
P1
P2
P3
I
e
ta
p
II
e
ta
p
Szkic dokumentacyjny
A
1
2
3
4
5
E
N
b
1
a
1
a
2
a
3
a
4
b
2
X
Y
b
3
b
4
h
0
=xxx
0
,0
0
0,00
y
1
y
2
y
3
y
4
B
D
C
x2
x1
x3
x4
(na podstawie dokumentacji projektowej Nr.iii z dn. dd.mm rr)
Sporządził dn. dd.mm.rr
Sprawdził i uzgodnił
Data, podpis……………………….
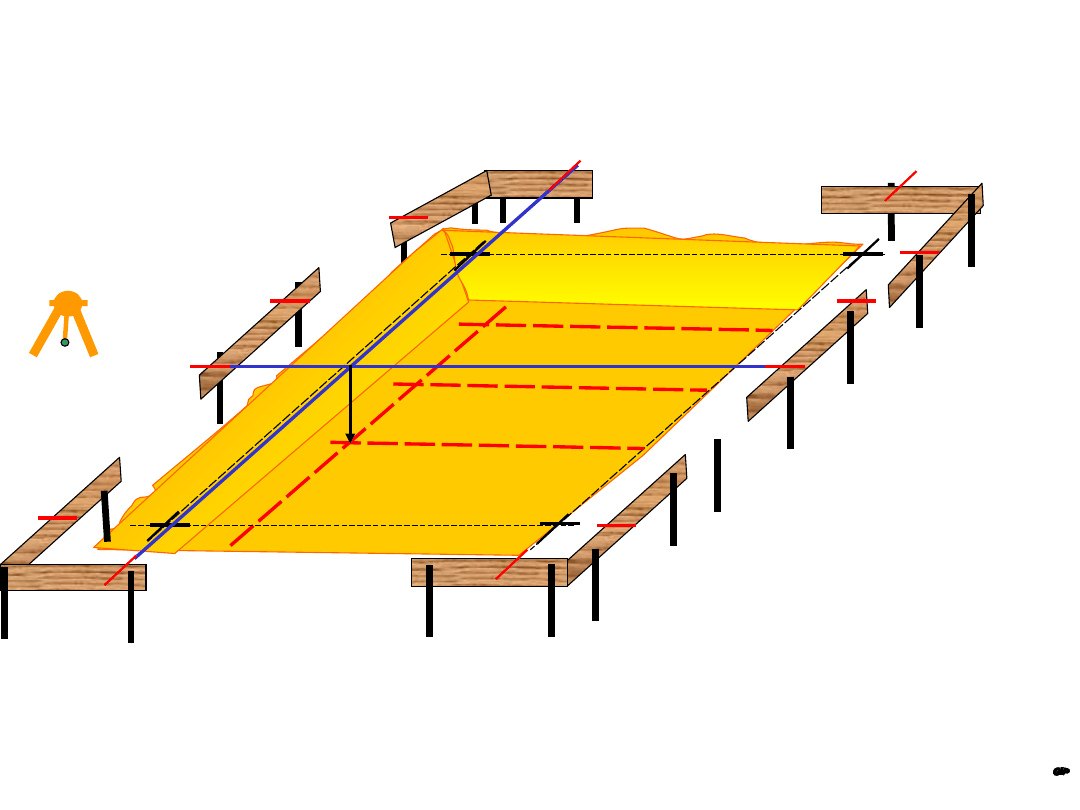
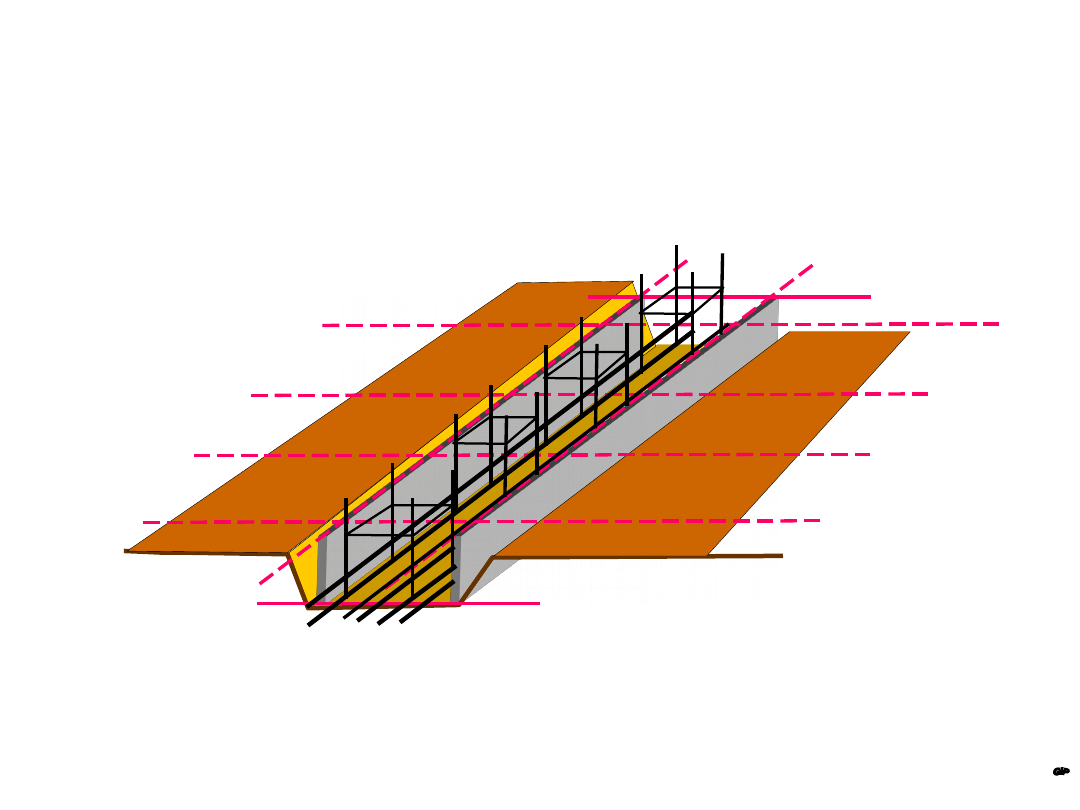
Tyczenie zakresu robót ziemnych
(przykład 1)
Wskaźniki osiowe wyznaczone na ławach budowlanych mogą posłużyć do
wytyczenia osi fundamentów
Tyczenie zakresu robót ziemnych
(przykład 2)
H
0.
– poziom zera
budowy
H
wyk.
h
1
h
2
h
3
h
4
h
5
h
5
h
6
a
b
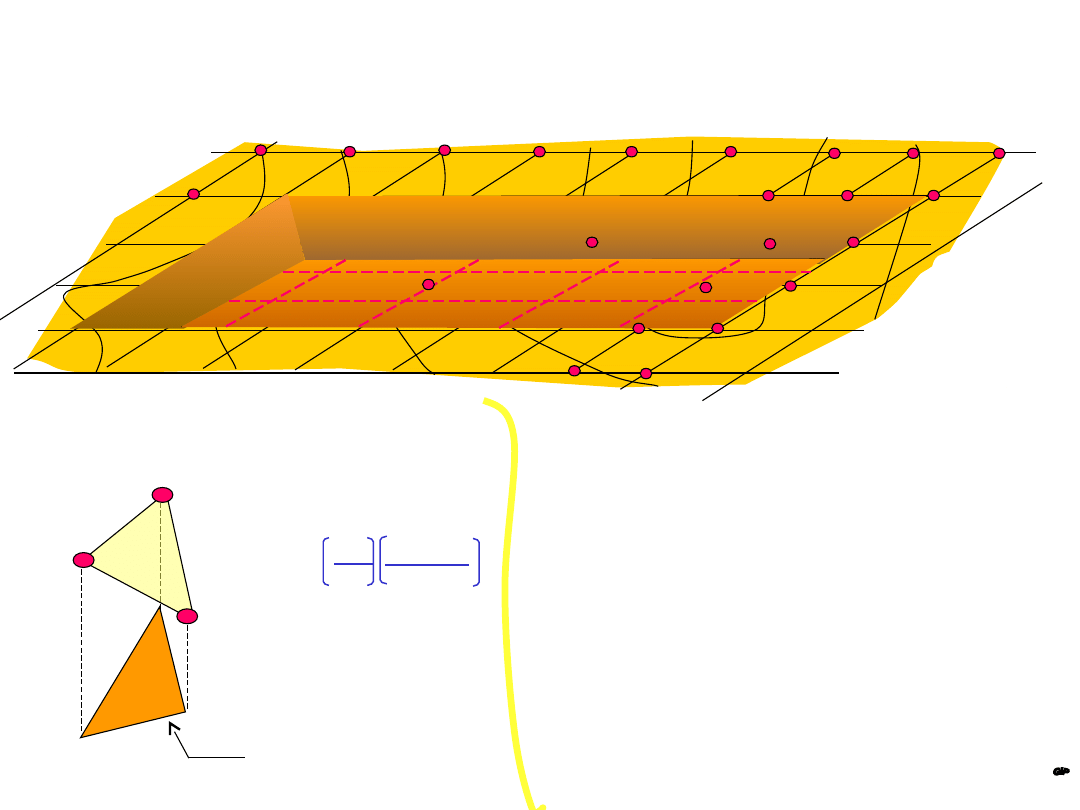
Tyczenie szczegółowe- roboty ziemne
a
h
i
b
h
j
h
k
H
0
V
i
=
a*b h
i
+h
j
+h
k
2 3
V =[v
i
]
I. Obliczenie objętości masy ziemi
nad poziomem zera budowy
I. Obliczenie objętości masy ziemi
wykopu
Obliczamy zależnie od zrealizowanego
kształtu wykopu na podstawie wyników
Inwentaryzacji robót ziemnych.
Inwentaryzacja robót ziemnych
•dokładność wytyczenia obrysu robót ziemnych 5-10cm.
•Kontrola głębokości wykopów w stosunku do zera budowy 5cm
Inwentaryzacja powykonawcza robót ziemnych powinna zapewnić:
•Kontrolę poprawności wykonania-Możliwość obliczenia mas ziemi
+3
55
69
69
67
62
58
53
66
33
C
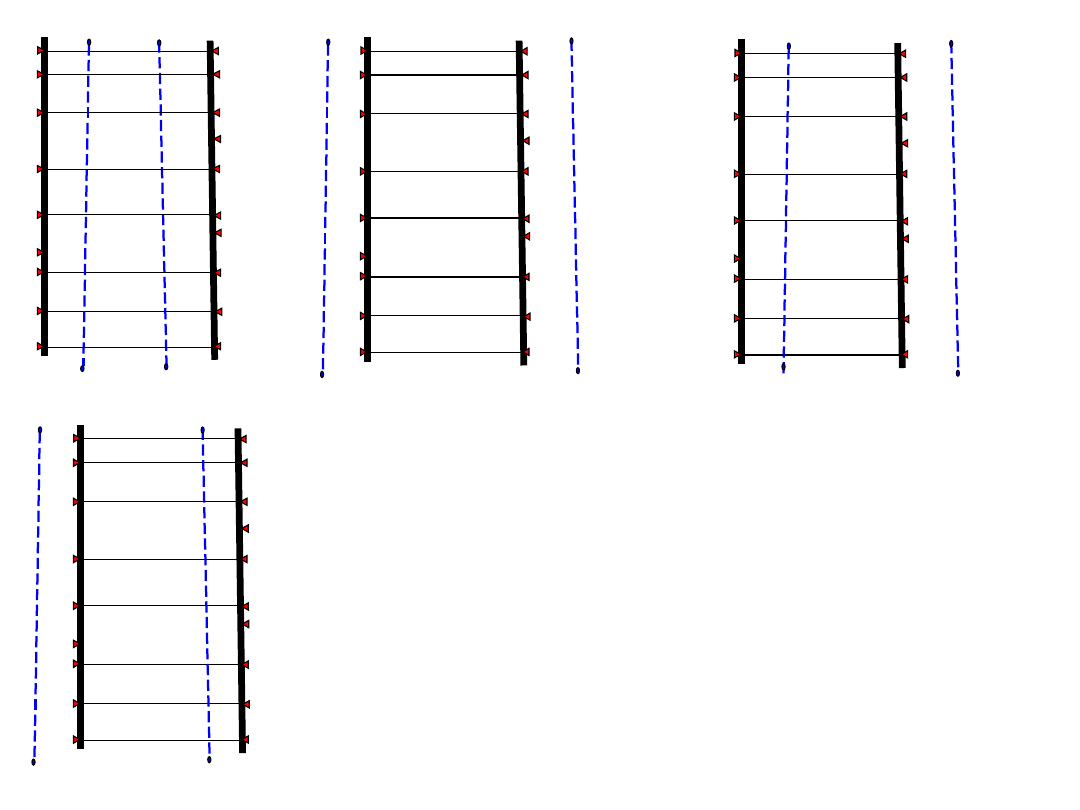
Tyczenie szczegółowe
-osnowa
-wskaźniki osiowe
I wariant
-osnowa
-wtyczane znaczki
osiowe fundamentów
II wariant
-osnowa
-wskaźniki osiowe
III wariant
Tyczenie szczegółowe (uwagi)
T
T
S
S
T
S
H
d
H
0
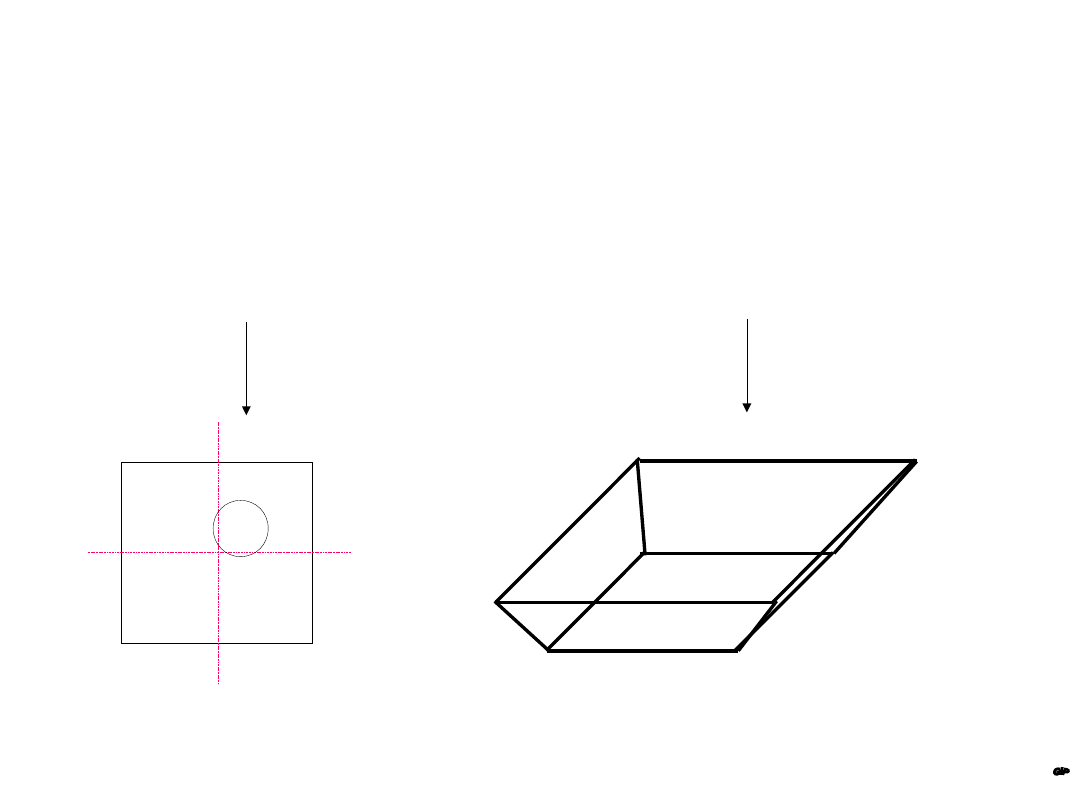
Tyczenie i kontrola deskowania
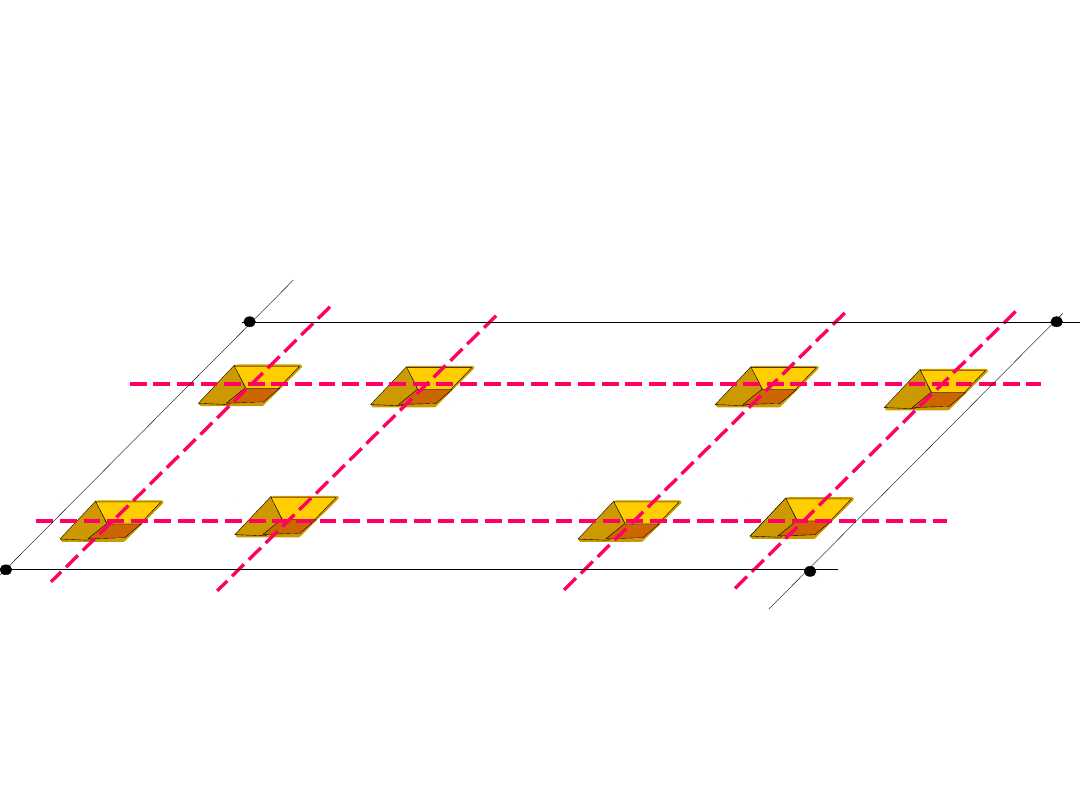
Inwentaryzacja stanu zerowego
(1)
C
4
i
reper roboczy
Wysokościowo- w stosunku do zera budowy H
0
reprezentowanym przez reper roboczy.
Sytuacyjnie- w stosunku do projektowanych osi obiektu
reprezentowanych przez punkty osnowy
budowlano- montażowej.
Wykonać można np. „tachimetrycznie” jeżeli wystarczająca
dokładność
a
1
a
1
a
2
a
2
Inwentaryzacja stanu zerowego
(2)
reper roboczy
Wysokościowa – niwelacja techniczna nawiązana do reperu roboczego
Sytuacyjna – od stałej prostej zorientowanej w stosunku do osi konstrukcyjnych
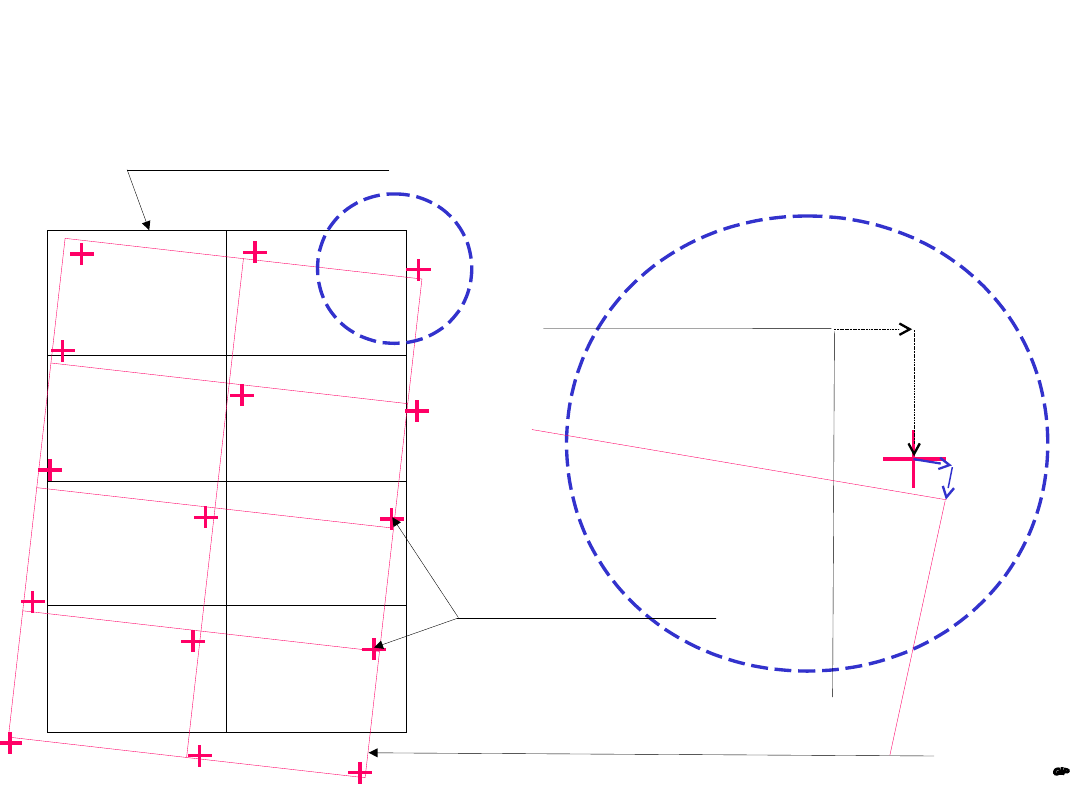
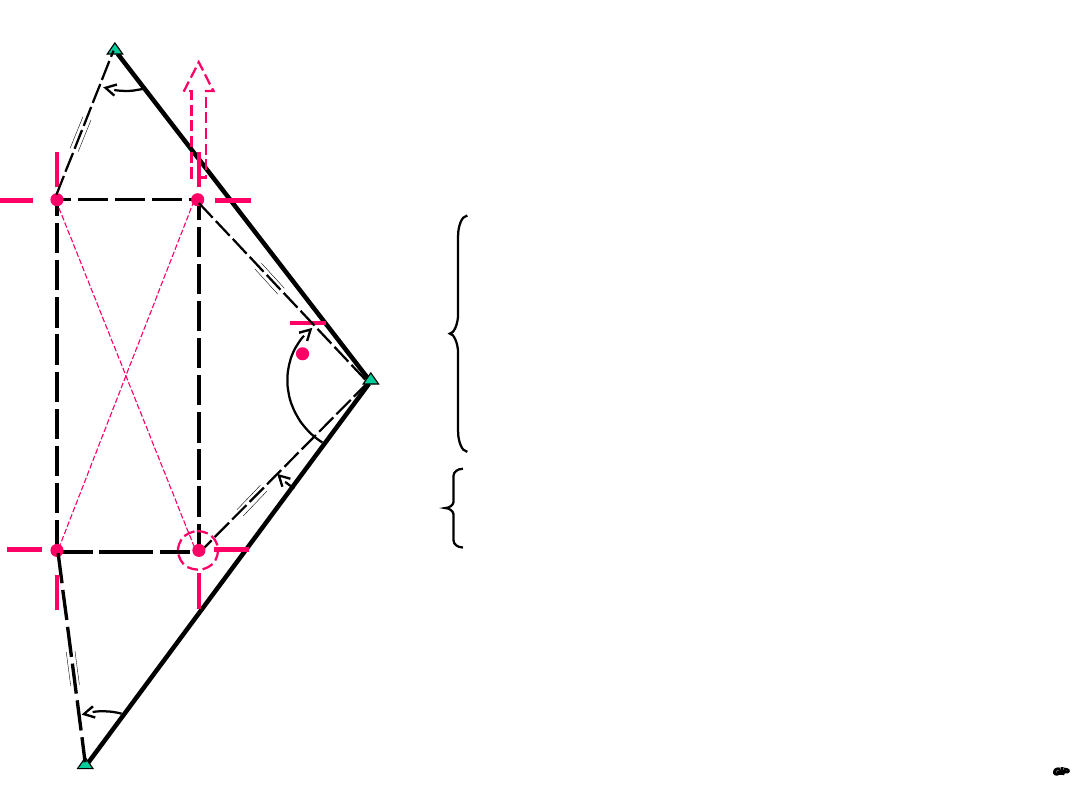
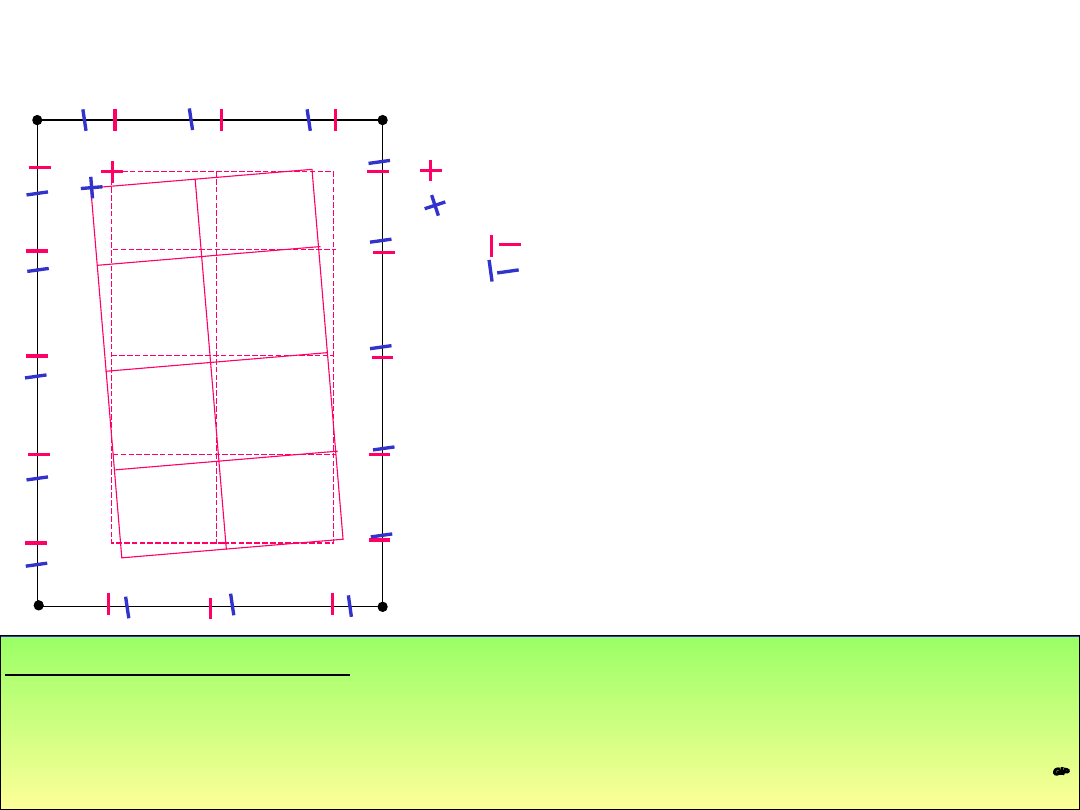
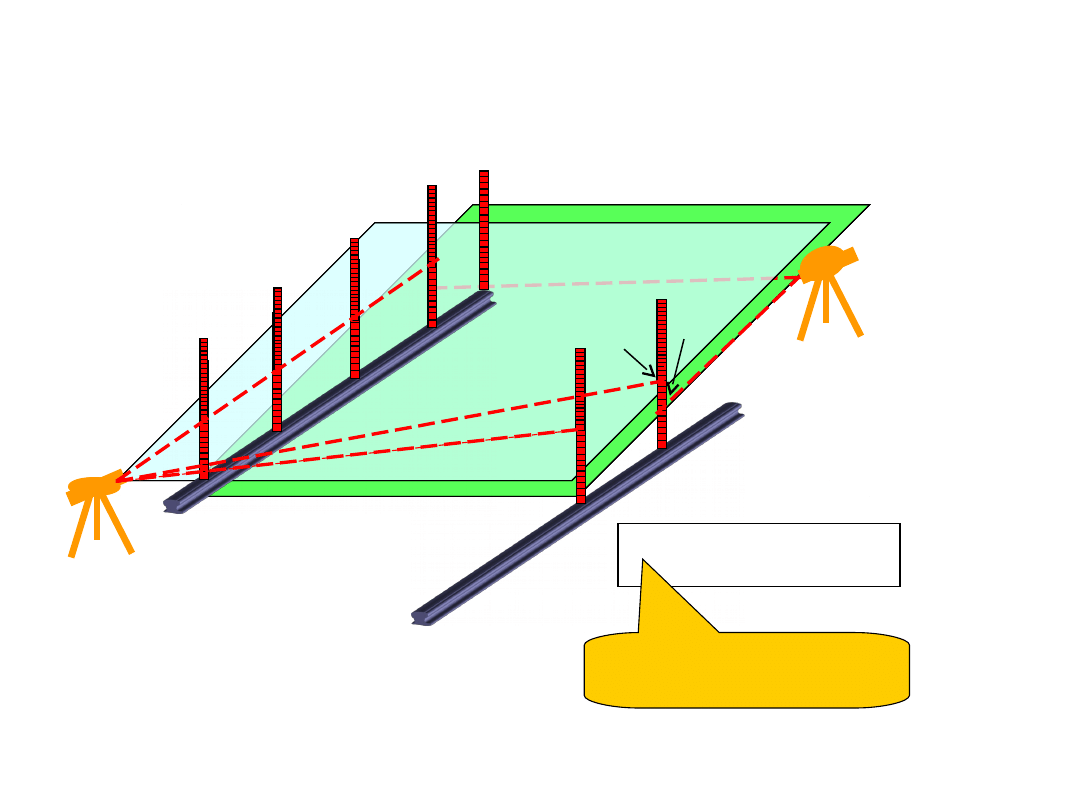
Wpasowanie siatki
konstrukcyjnej (1)
dy
dx
dy
’
dx
’
Siatka projektowana
Siatka wpasowana w zrealizowane osie
Siatka zrealizowana
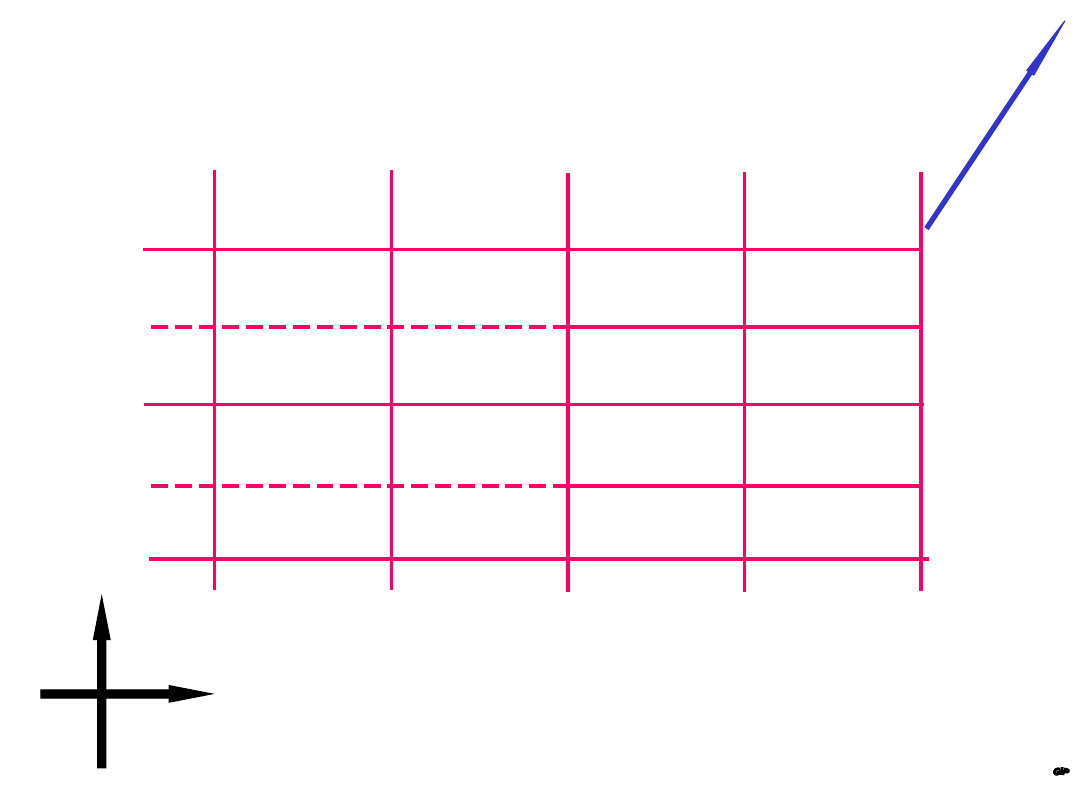
Wpasowanie siatki
konstrukcyjnej (2)
-x, y- siatka konstrukcyjna zaprojektowana
-x’,y’,- siatka konstrukcyjna wpasowana
(x, y)
(x’, y’)
-wskaźnik osiowy zaprojektowany
-wskaźnik osiowy po wpasowaniu
Dalsza realizacja projektu wg. wpasowanej
siatki konstrukcyjnej
I. można przyjąć nowe współrzędne węzłów siatki
i przeliczyć cały projekt do tych współrzędnych.(?)
II. można wyznaczyć nowe wskaźniki osiowe i od
nich tyczyć.(?)
III. Często dopiero po zrealizowaniu stanu zerowego
jest wyznaczana osnowa budowlano-montażowa.(?)
Odchyłki w kierunku osi z
dh= h
1
- h
max.
- odchyłka pionowa w stosunku do punktu położonego najwyżej
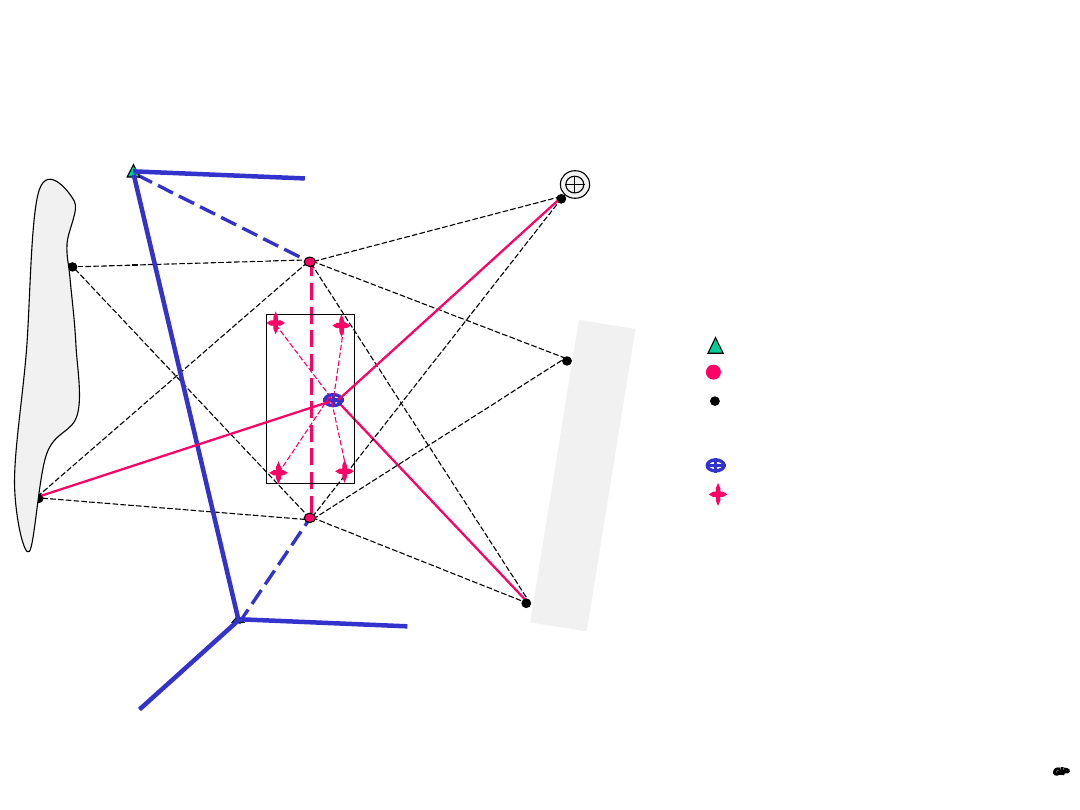
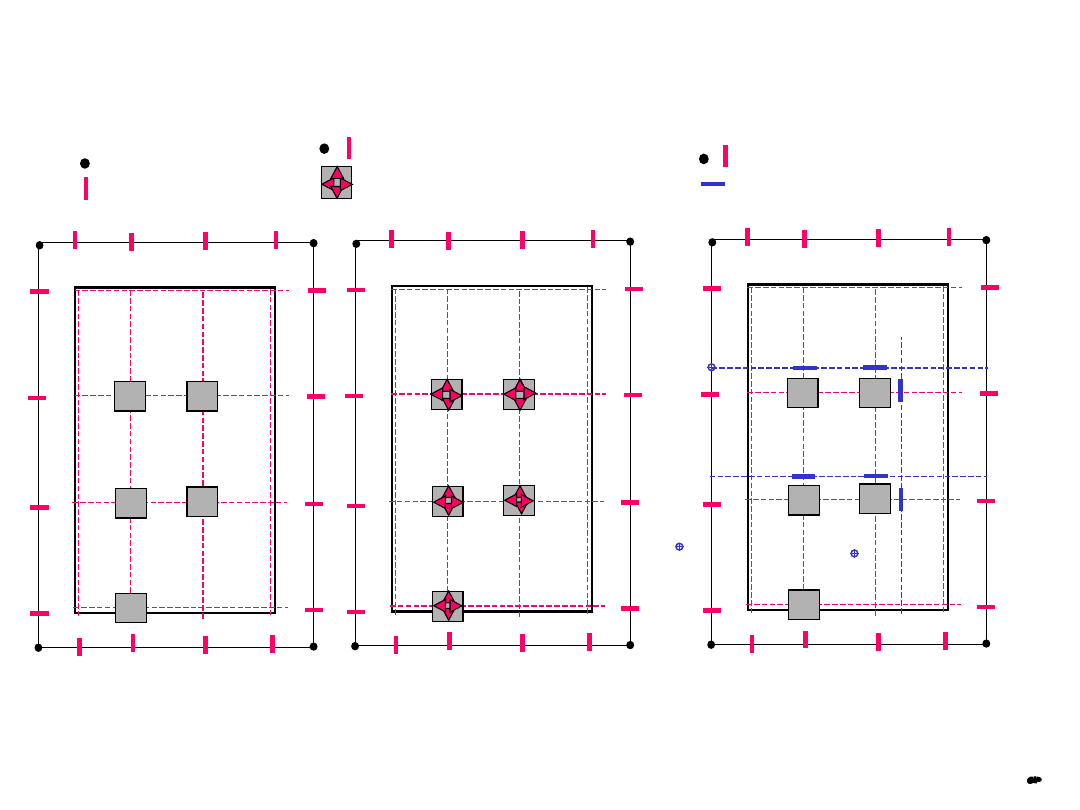
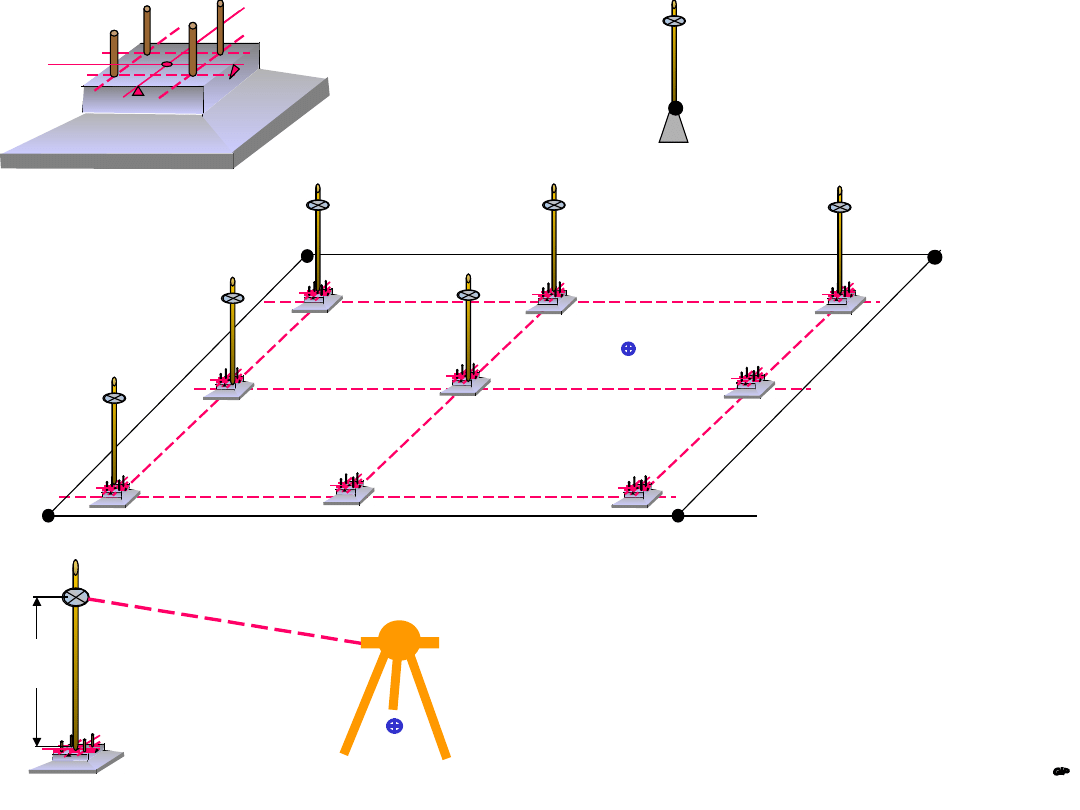
Osnowa budowlano-montażowa
(1)
-punkt osnowy realizacyjnej
-punkt głównej osi obiektu
-punkt osnowy budowlano-
montażowej
-stanowisko tachimetru
-wskaźnik konstrukcyjny
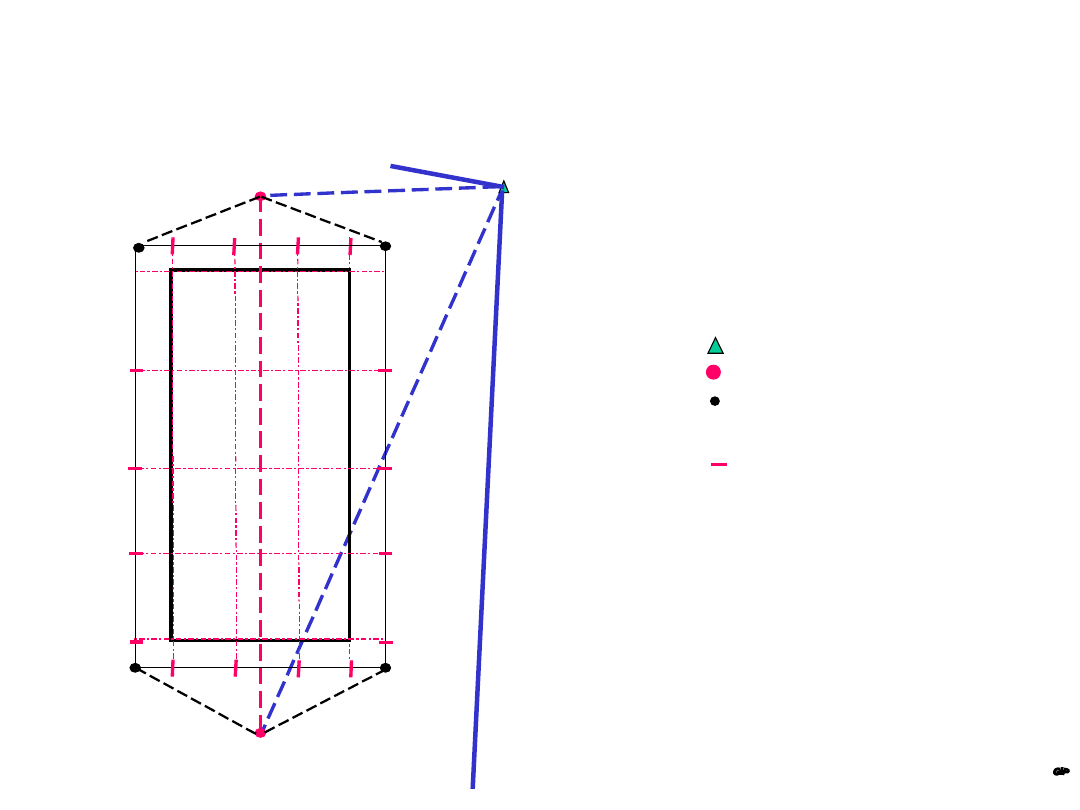
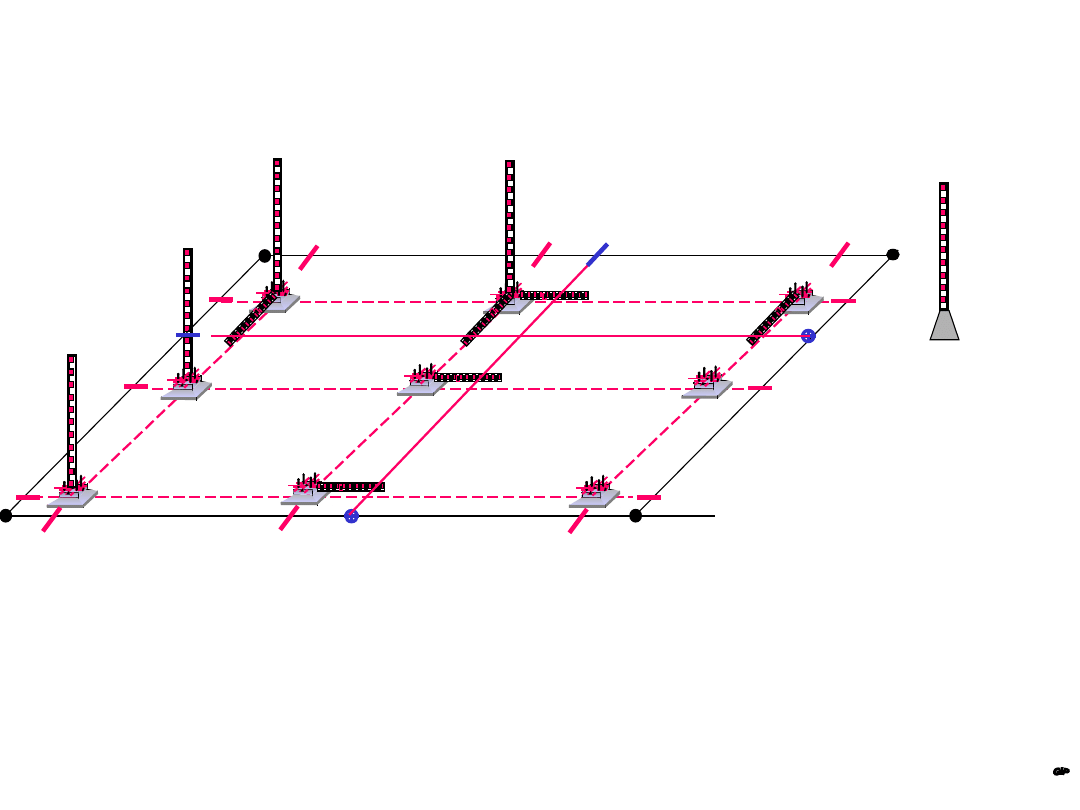
Osnowa budowlano-montażowa
(2)
-punkt osnowy realizacyjnej
-punkt głównej osi obiektu
-punkt osnowy budowlano-
montażowej
-wskaźnik osiowy (punkt
osnowy budowlano- mont.
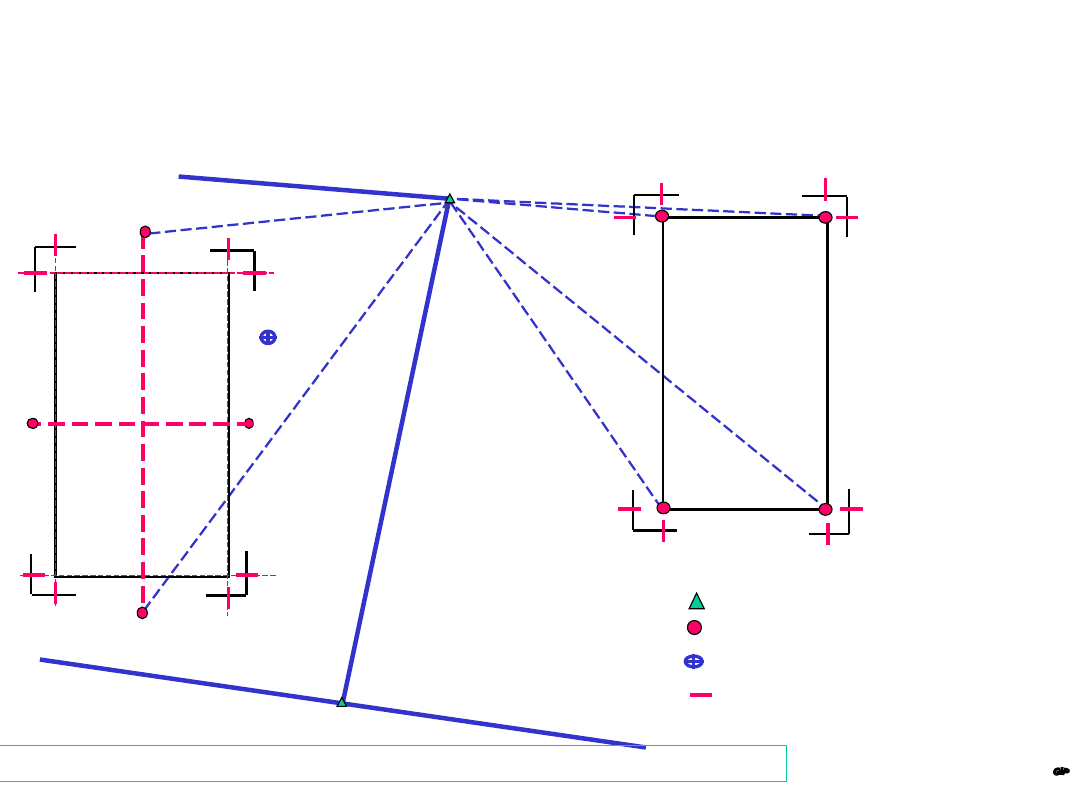
Osnowa budowlano-montażowa
(3)
-punkt osnowy realizacyjnej
-punkt głównej osi obiektu
-stanowisko tachimetru
-wskaźnik osiowy –punkt osnowy
budowlano montażowej
Muszą być wykonane pomiary kontrolne wytyczenia głównych osi obiektu
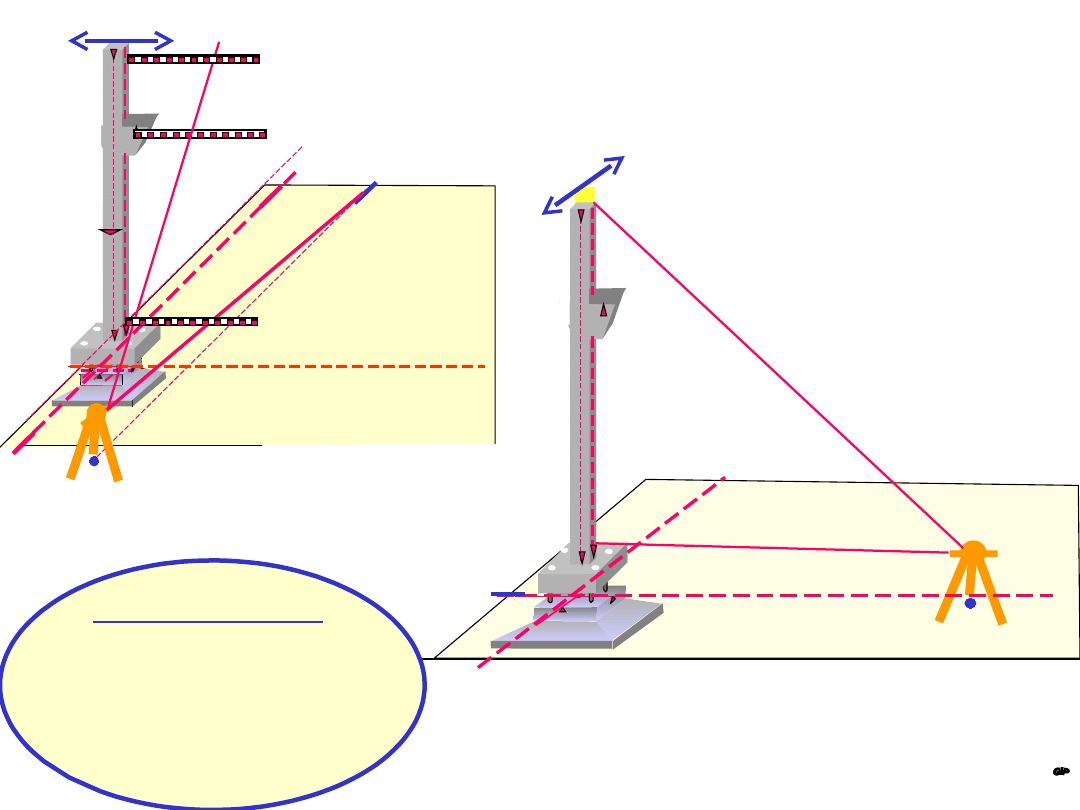
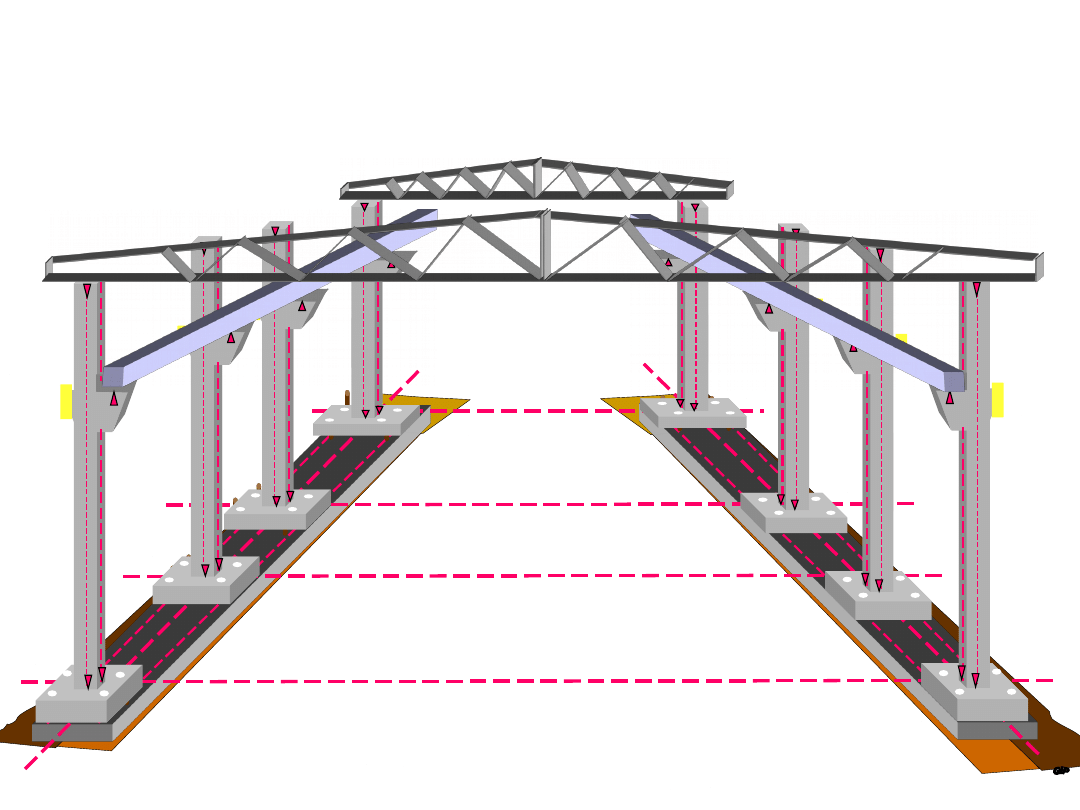
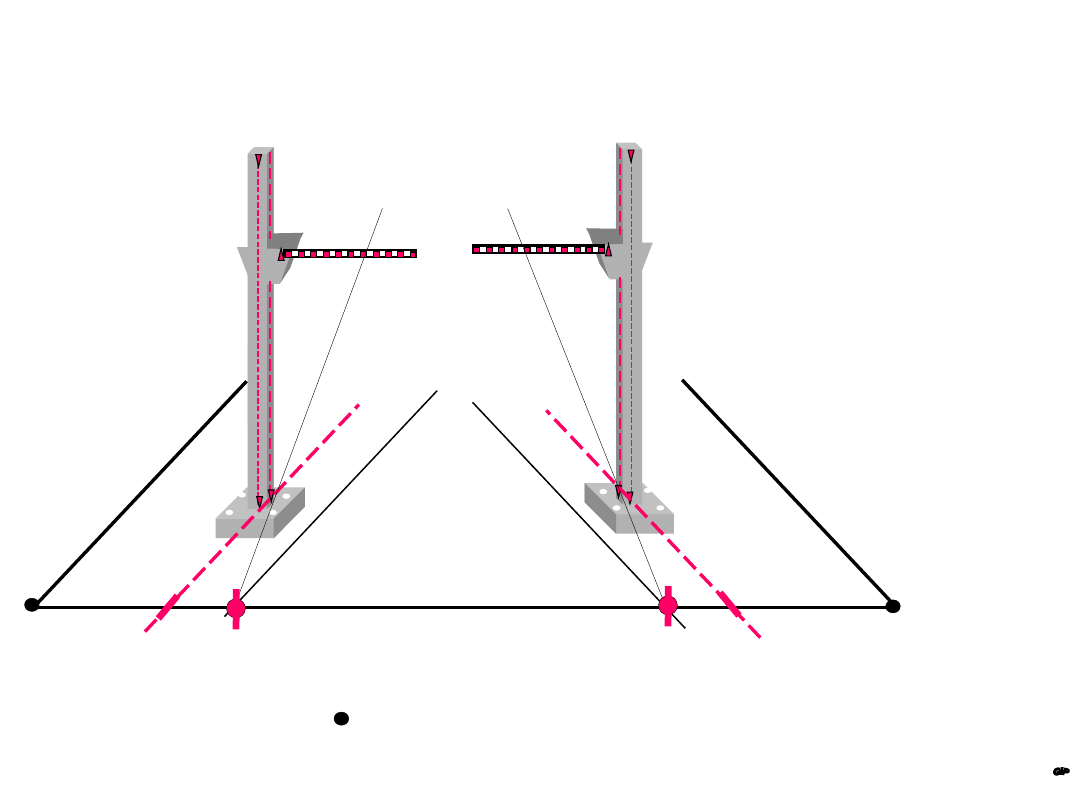
Ustawianie słupów
Metoda pionowej płaszczyzny
odniesienia
Metoda rzutowania
Wysokościowo
Na stopach fundamentowych
układa się podkładki o
grubości dh
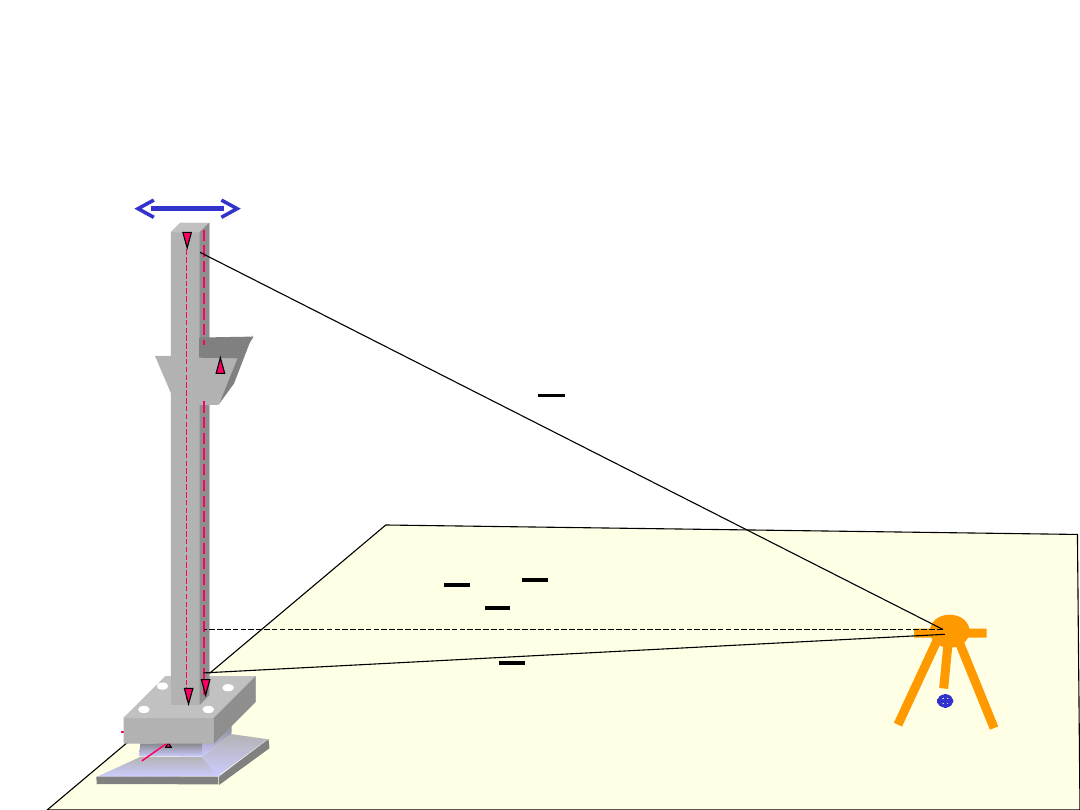
Ustawianie słupów
d
g
d
d
dp=
d
g
d
d
Inwentaryzacja powykonawcza
d
a
1
a
2
l
1
l
2
w
1
w
2
A
B
T
1
T
2
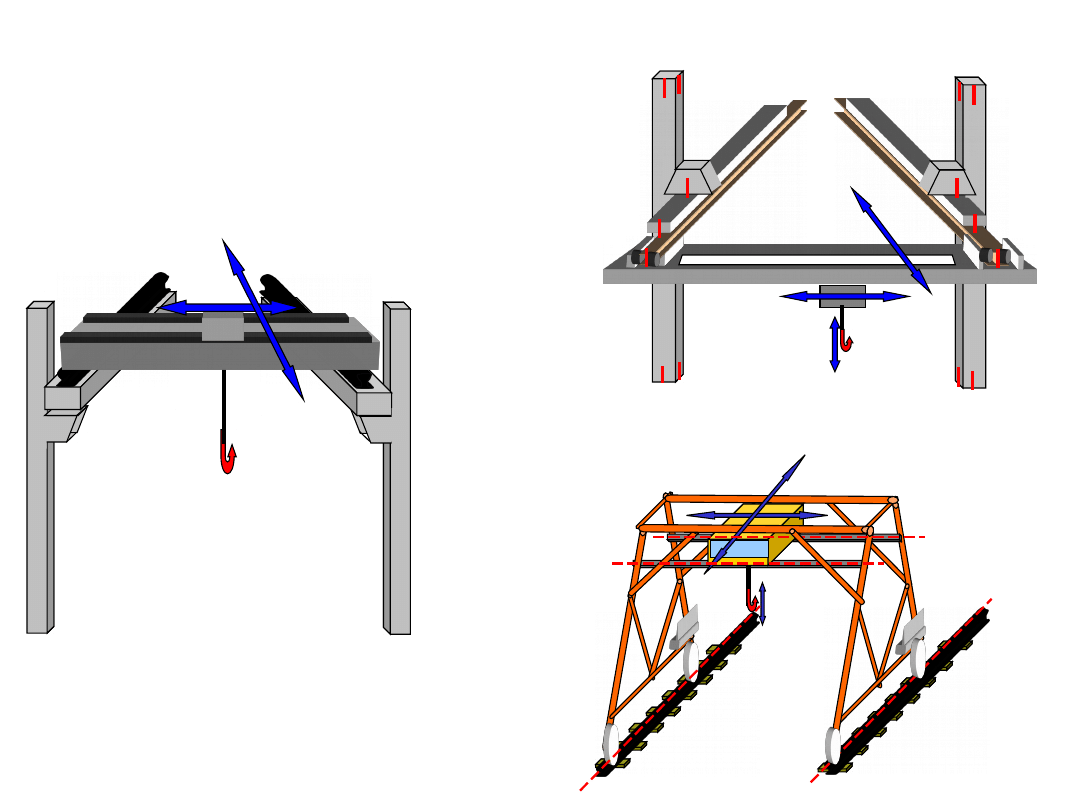
SUWNICA
SUWNICA
Pomostow
a
Podwieszona
Bramowa
Tory jezdne suwnicy
Tory jezdne suwnicy
GEOMETRIA
W
1
W
2
R
s
R
b
R
w
R
sł
O
L1
O
L2
O
L2x
O
L4
O
L3
O
L5
O
L1x
O
P1
O
P1x
O
P5
O
P4
O
P2x
O
P2
s
s
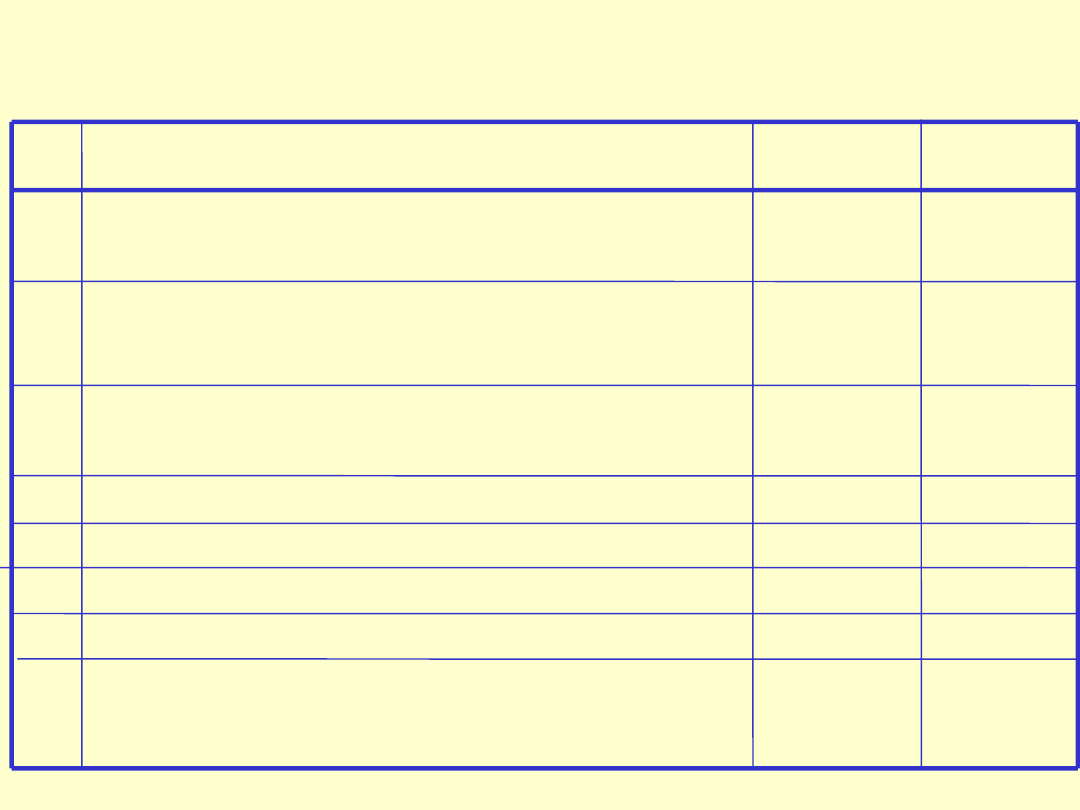
Parametry dokładności
kształtu
b
ę
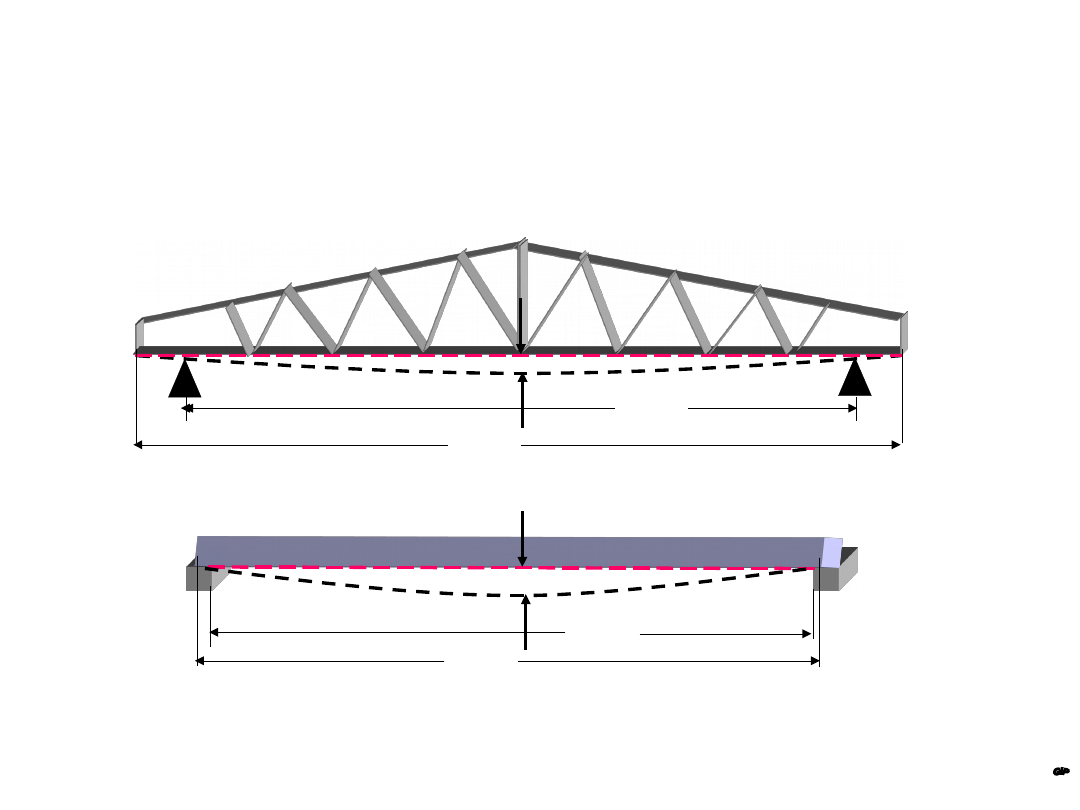
Ugi
cie belki podsuwnicowej
7.
L/1000
b
H /500
Wyboczenie belki podsuwnicowej
6
.
10,0mm
ę
ę
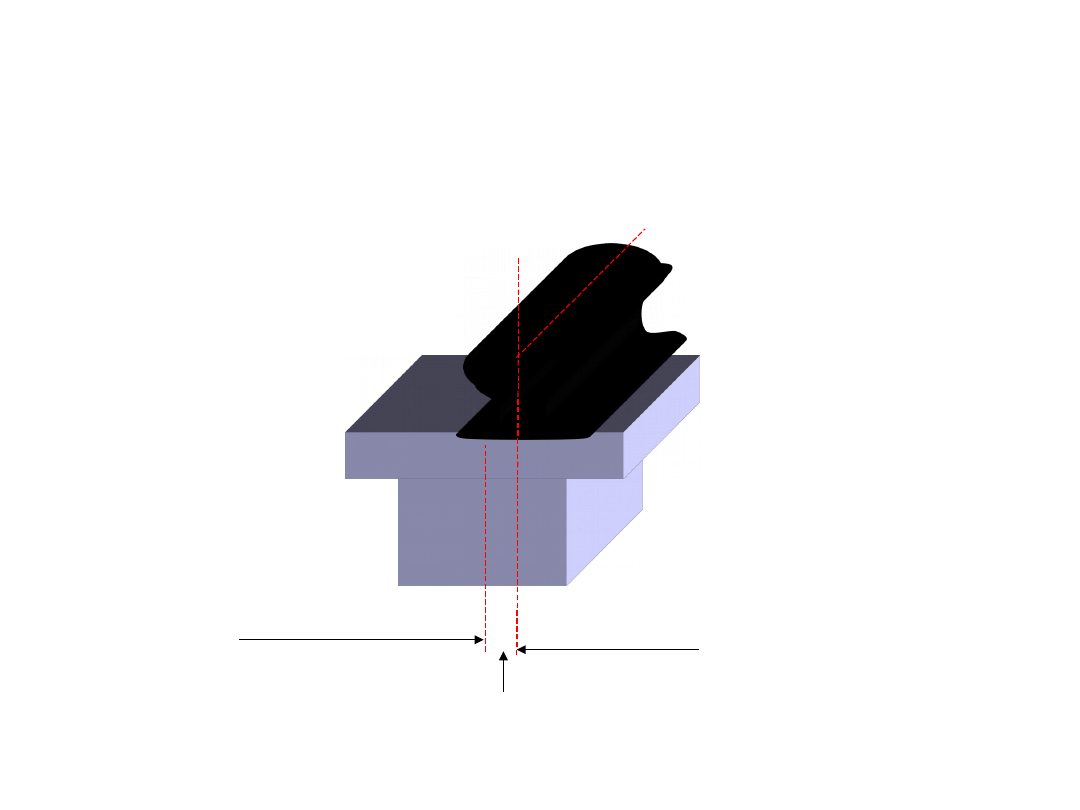
Przesuni
cie osi szyny wzgl
dem osi belki
5
L
b
/
150
0
łu
Pochylenie podżne szyn
4
.
N/1000
15,0-20,0mm
ł
ó
Przechyka torw suwnic
-
pomostowych
-
bramowych
3.
0,8mm
1,5mm
2,5mm
5,0mm
Odchył
ka od prostoliniowo
ś
ci ( na odcinku <
N)
-
pomostowych
-bramowych
2
1,5mm
6,0mm
5,0 mm
20,0 mm
Dopuszczalna r
óż
nica rozstawu dla tor
ó
w suwnic:
-
pomostowych
-
bramowych
1.
Błąd średni
wytyczeni
a
Odchyłkadop.
w mm
Rodzaj parametru
Lp
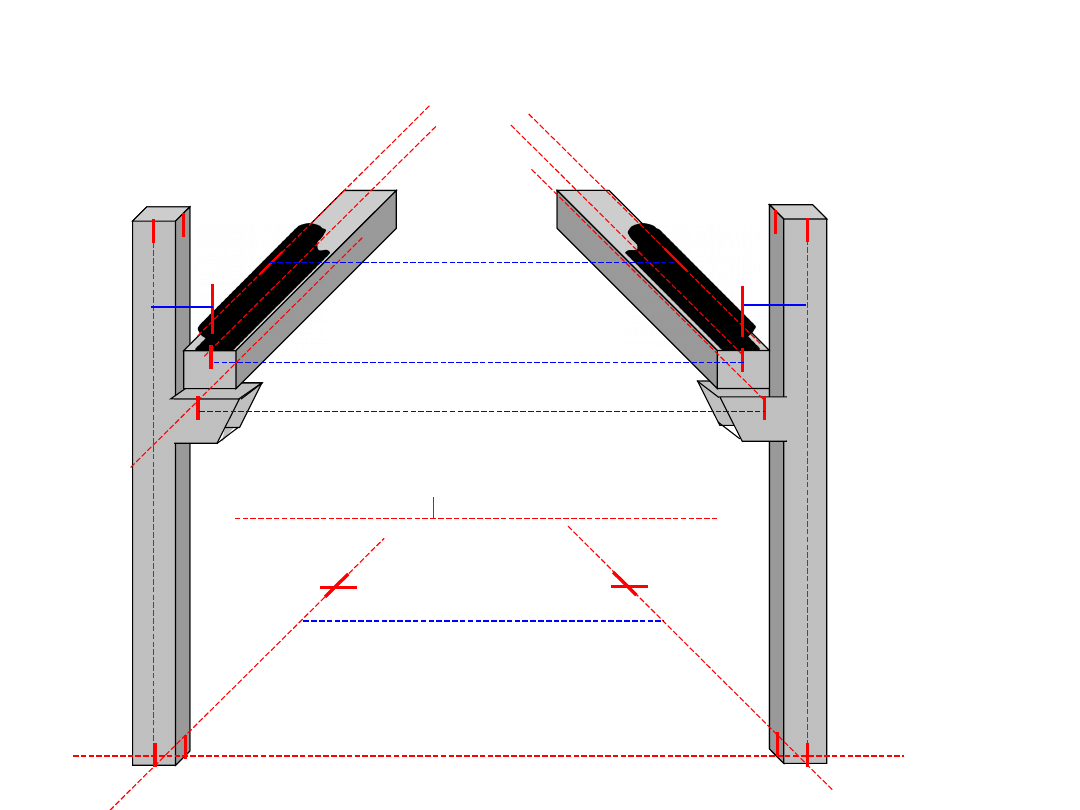
Warunki ustawienia szyn
oś szyny
oś belki
du=15mm
Warunki zachowania skrajni
s
p
s
h
s
p> 50mm+suma luzów na kołach
jezdnych
s
h> 100mm
Odległość osi szyny i
główki szyny
od elementów
konstrukcji
ograniczających
Skrajnię toru w
płaszczyźnie
poziomej i
pionowej musi być
ustalona w projekcie
s
h
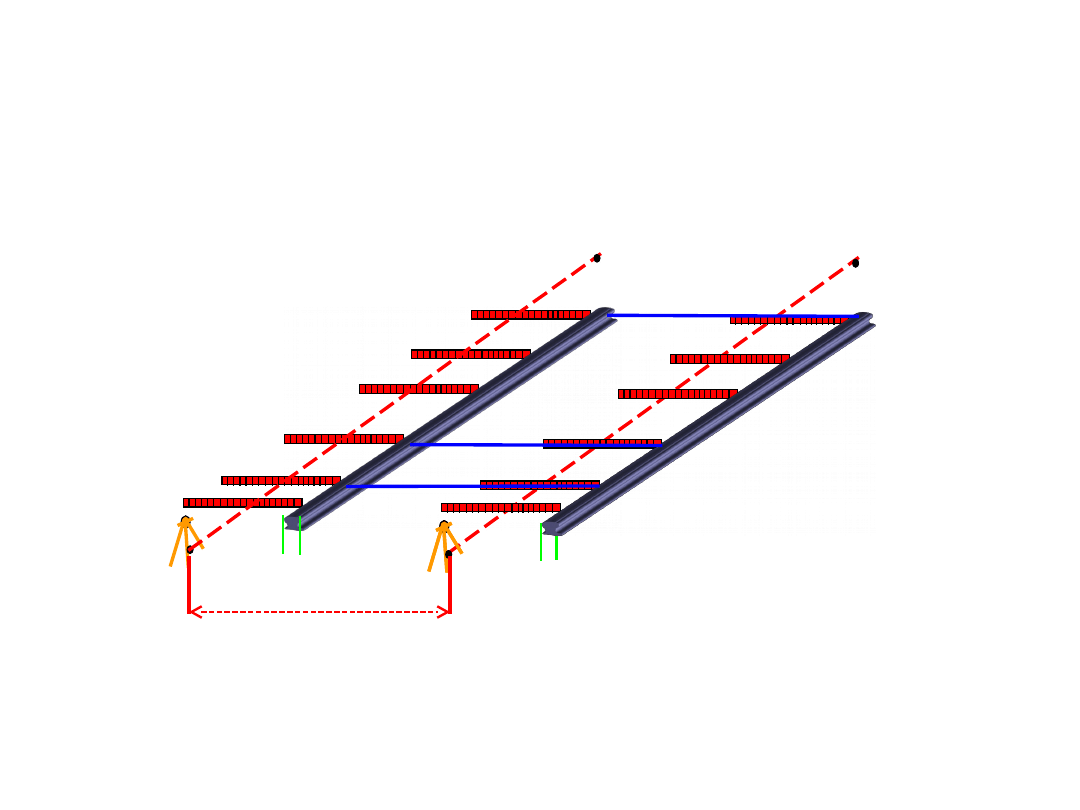
Pomiar w płaszczyźnie
poziomej
T
L
T
P
S
P
S
L
p
pi
p
li
s
i
s
i
r
i
d
i
=r
i
+s
i
+p
li
-p
pi
dh
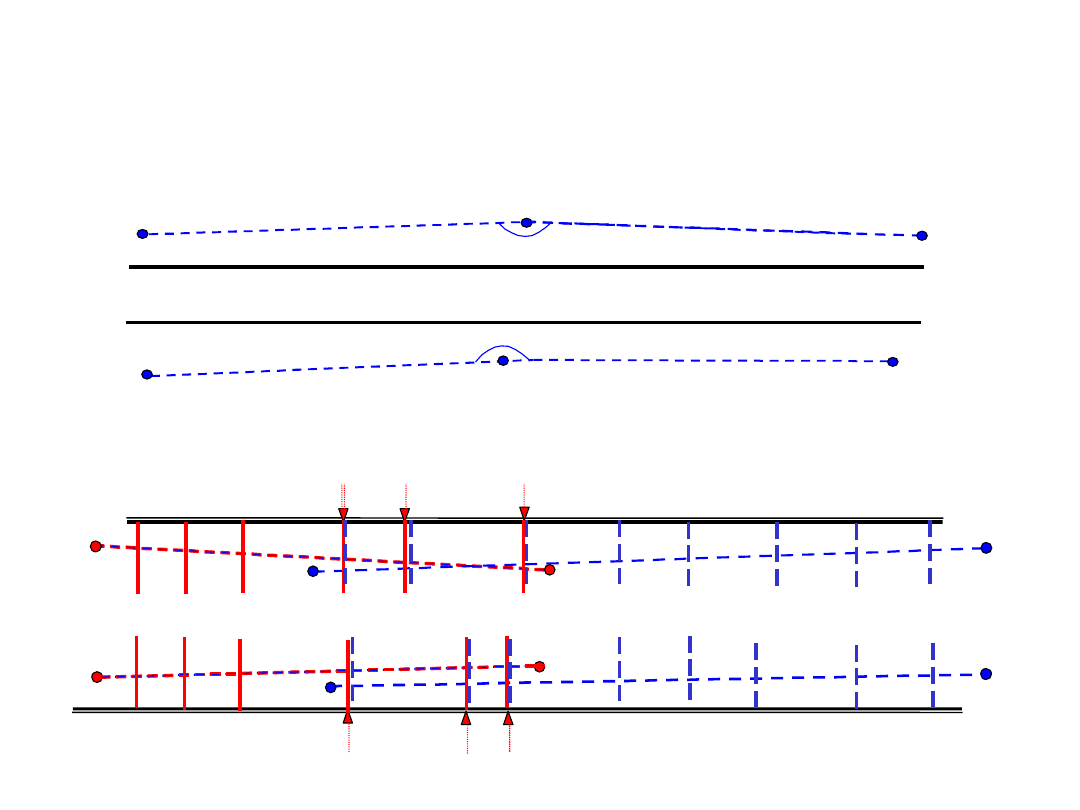
Niwelacja główek szyn
N
1
h
pi
h
lpi
N
2
h
li
dh=h
lpi
–h
pi
= h
li
- h
pli
różnica wysokości
pomiędzy osiami celowymi
niwelatorów
dh
dh
h
pli
Lokalizacja osnowy pomiarowej
względem torów jezdnych suwnicy
(1)
S
2
T
2
T
1
S
1
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
1
0
S
2
T
2
T
1
S
1
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
1
0
T
2
T
1
S
1
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
1
0
S
2
S
2
T
2
T
1
S
1
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
1
0
Lokalizacja osnowy pomiarowej
względem torów jezdnych suwnicy
T
5
T
6
T
1
T
2
T
3
T
4
1
2
T
2
T
3
T
4
S
2
S
1
S
4
S
3
1
l
2
l
3
l
4
T
1
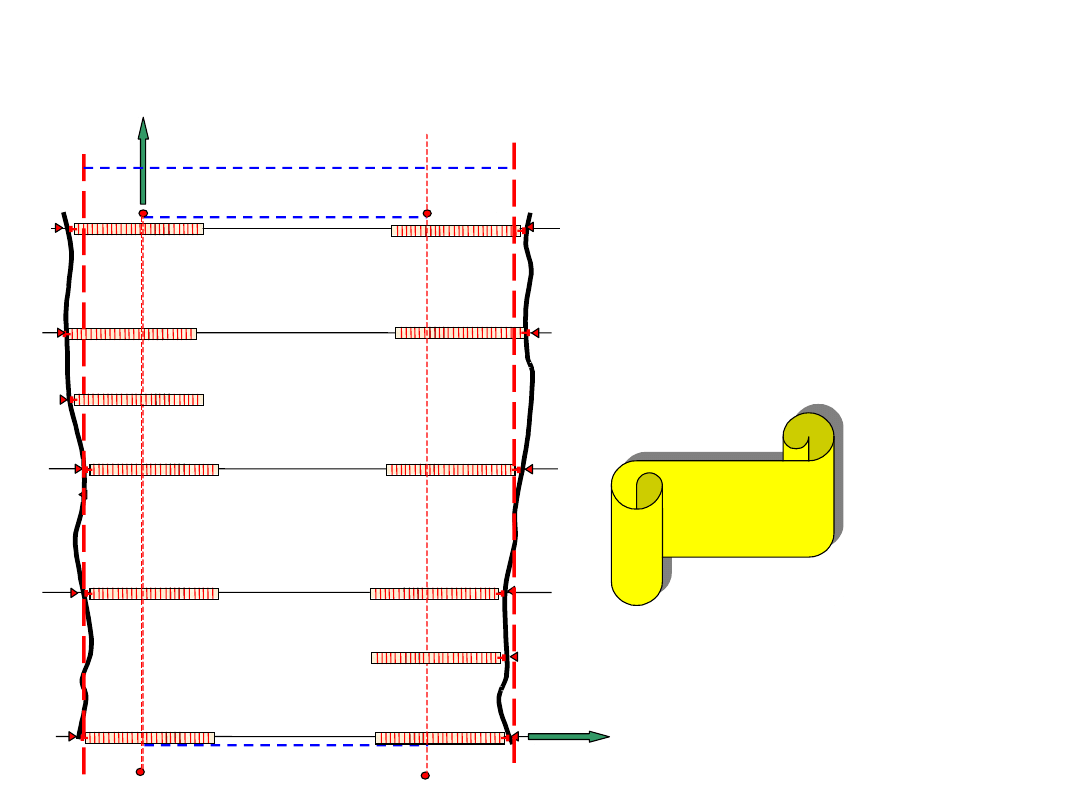
Inwentaryzacja sytuacyjna torów
suwnicy
p
l1
p
l2
p
l3
p
l4
p
l5
p
p1
p
p2
p
p3
p
p4
p
p5
d
d
Y
X
li
= X
pi
= l
i
l
5
l
4
l
2
l
1
l
3
Y
li
= - p
li
; Y
pi
= d+ p
pi
R
s
a
p
a
l
Y
lti
=- a
l
; Y
pti
=d+a
p
V
pi
=
Y
pi
-
Y
pti
V
li
=
Y
li
-
Y
lti
T
1
T
2
Kontrola wyników pomiaru
r
1
r
2
r
3
r
4
P
l1
P
l2
P
l3
P
l4
P
p
1
P
p
2
P
p
3
P
p
4
s
2l
s
2
p
s
1
p
s
1l
s
1l
s
1l
s
1l
s
2
p
s
2
p
d
2
d
i
=r
i
+p
li
+p
pi
+s
il
+s
ip
d
2
d
1
d
3
d
4
v
1
v
2
v
3
v
4
d
2
d
1
d
3
d
4
v
1
v
2
v
3
v
4
?
d
2
d
1
d
3
d
4
v
1
v
2
v
3
v
4
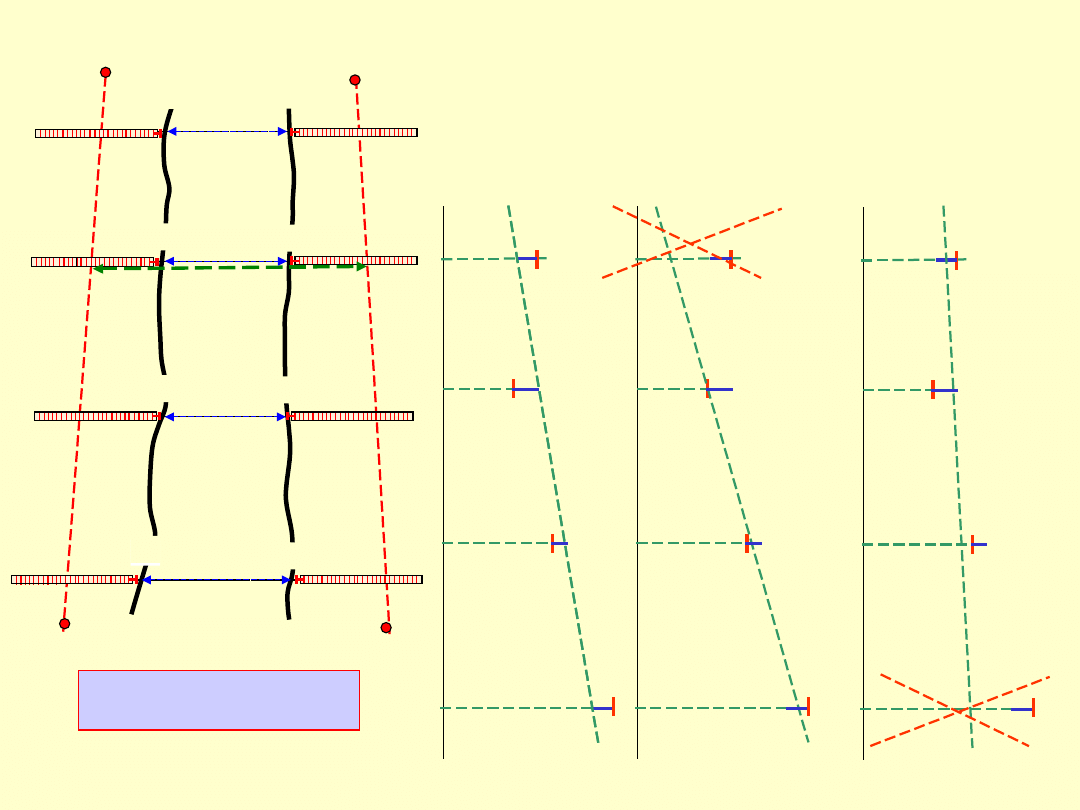
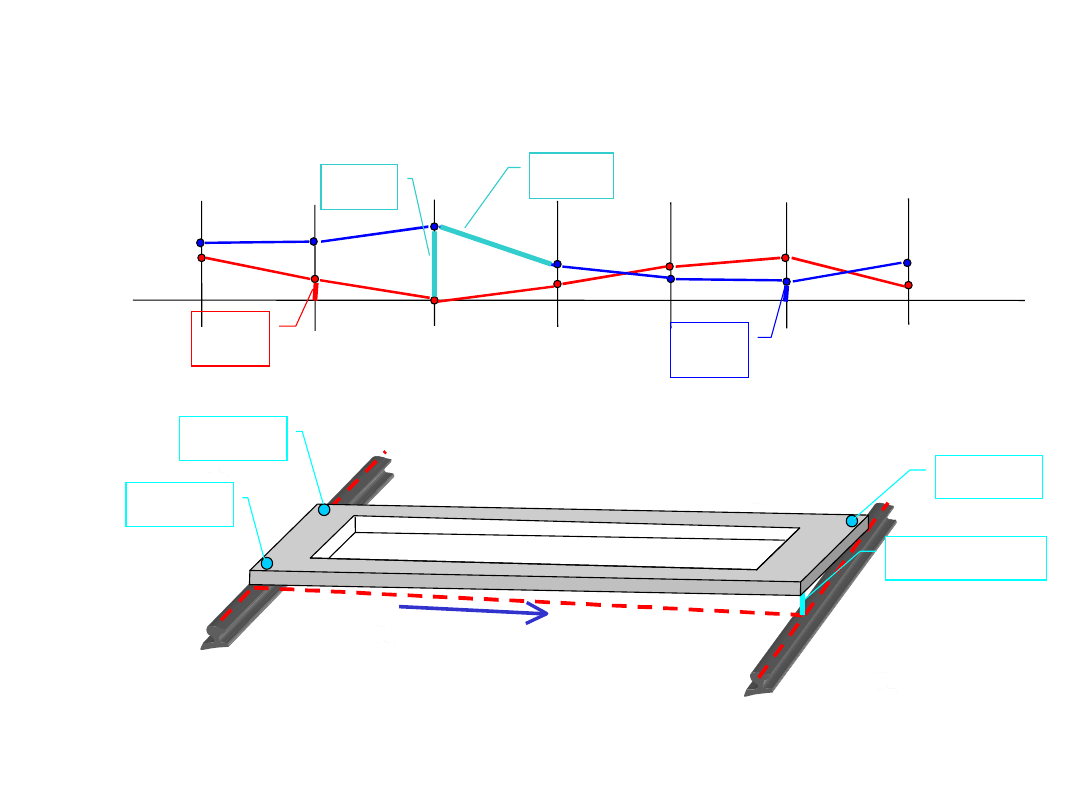
Interpretacja odchyłek
poziomych
V
i
P
j
P
k
P
Vi
P
>
V
Vj
P
>V
Vk
P
<
V
j
L
i
L
k
L
Vj
L
<
V
Vi
L
<
V
Vk
L
<
V
V
L
P
miejsce
ustawienia
suwnicy w
trakcie pomiaru
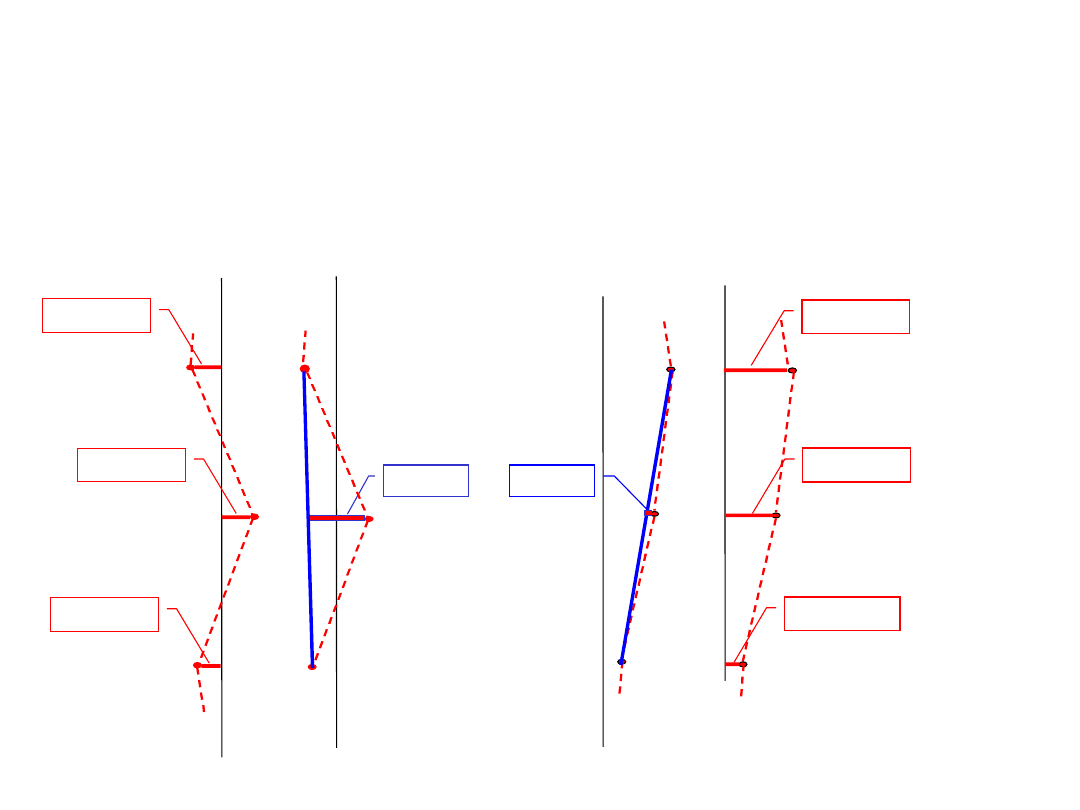
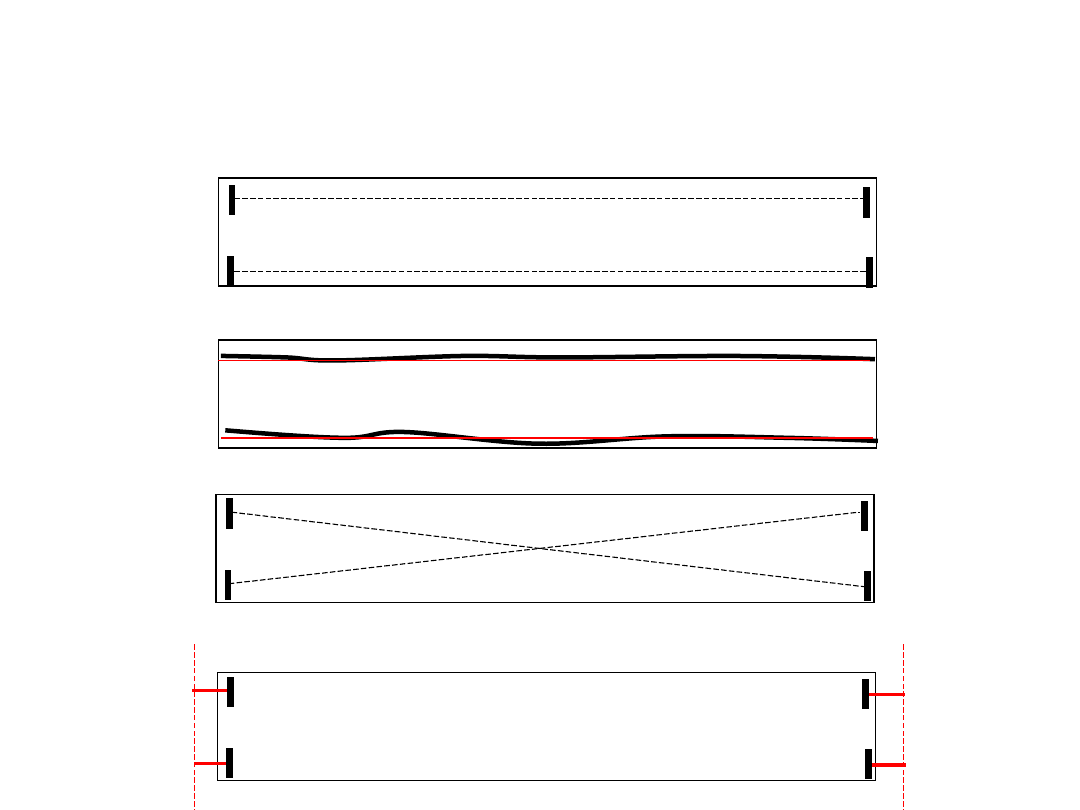
Kształt szyn w płaszczyźnie poziomej
vl
1
vl
2
vl
3
vl
4
vl
5
vl
6
vl
7
vl
8
vl
9
vl
10
vl
11
vp
1
vp
2
vp
3
vp
4
vp
5
vp
6
vp
7
vp
8
vp
9
vp
10
vp
11
x
1
x
2
x
3
x
4
x
5
x
6
x
7
x
8
x
9
x
10
x
11
Szyna
lewa
Szyna
prawa
+Vl
+Vp
X
Skala podłużna-
Skala
poprzeczna-
Obiekt XXX
Pomierzył i opracował YYY (data)
0
+Vr
-Vr
-Vr
+Vr
+Vr
+Vr
+Vr +Vr +Vr
-Vr
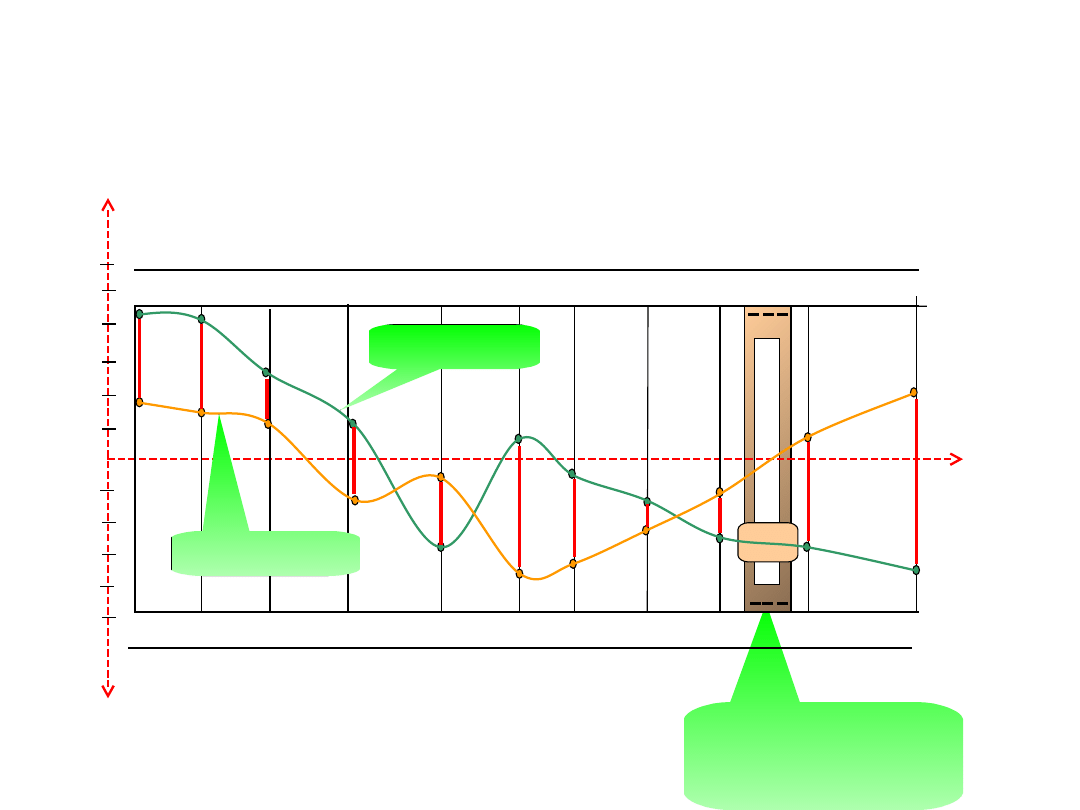
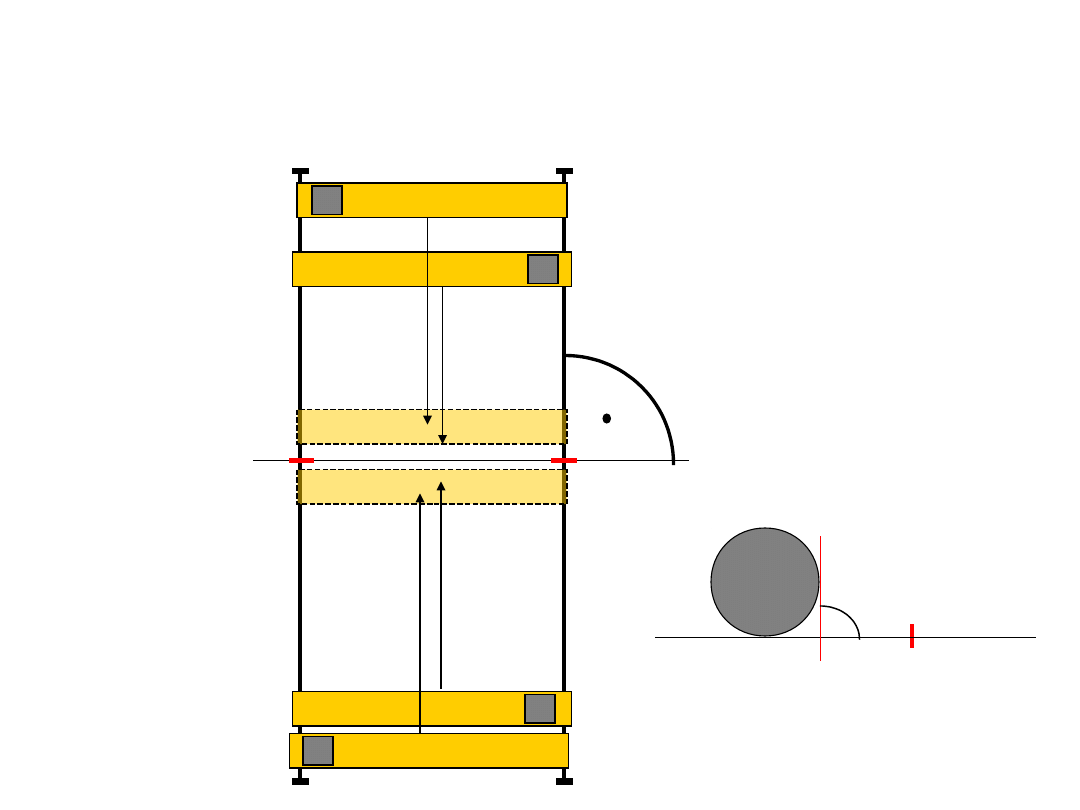
Interpretacja odchyłek
pionowych
Δh <N/1000
dh =0
dh =0
dh =0
i
1
%
i
2
%
I
4
%
I
3
%
i
max
I
max
L
P
L
P
Vh
l
Vh
p
Kontrola kształtu suwnicy
- Rozpiętość kół jezdnych
- Kontrola prostoliniowości i rozstawu szyn wózka
- Kontrola przekątnych ustroju jezdnego
- Kontrola prostoliniowości ustawienia kół
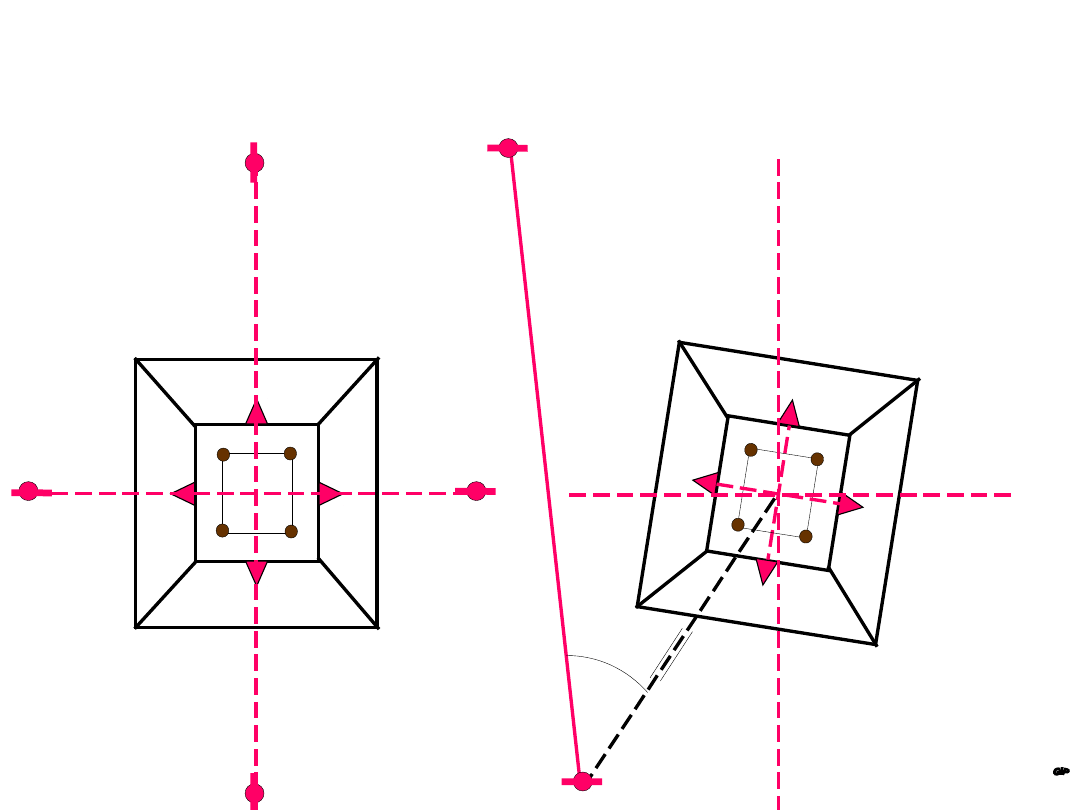
Przekoszenie suwnicy
I
II
III
IV
k
i
T
max
T
max
T
max
T
max
v
max
v
max
v
max
v
max
L
P
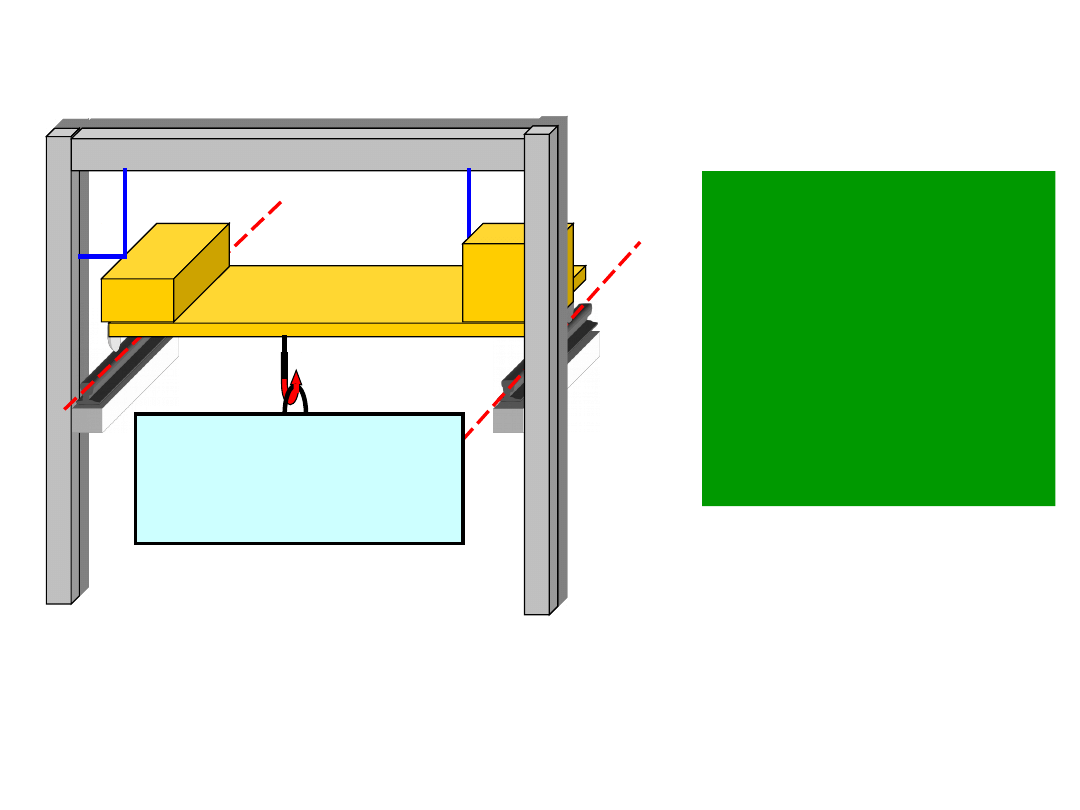
dp
I
=k
IL
-
k
IP
baza kontrolna
cztery najazdy na bazę kontrolną
Pozwalają na czterokrotne wyznaczenie
„przekoszenia” dp
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
Wyszukiwarka
Podobne podstrony:
Zagadnienia na zaliczenie wykładów, semestr IV, genetyka, wykłady plus zagadnienia na test u Ciesiel
Socjotechnika - wyklady plus ksiazka, Politologia WSNHiD, Licencjat, VI SEMESTR, Socjotechnika
VI Wykład 1 plus TRASA
podrecznik bardacha plus wyklady
Słup12, studia, Budownctwo, Konstrukcje betonowe Projekty Ćwiczenia Wykłady, Konstrukcje Betonowe, Ż
PLYTA, studia, Budownctwo, Konstrukcje betonowe Projekty Ćwiczenia Wykłady, Konstrukcje Betonowe, Że
II STAN GRANICZNYzbiru, studia, Budownctwo, Konstrukcje betonowe Projekty Ćwiczenia Wykłady, Konstru
ŻEBRO, studia, Budownctwo, Konstrukcje betonowe Projekty Ćwiczenia Wykłady, Konstrukcje Betonowe, Że
Wyklady mikroby plus immuny i antybiotyki, Farmacja, mikrobiologia
PODCIĄG, studia, Budownctwo, Konstrukcje betonowe Projekty Ćwiczenia Wykłady, Konstrukcje Betonowe,
wyklad wstepny plus proby badawcze
TAM GDZIE PLUS TO ODPOWIEDŹ POPRAWNA, UŁ Sieci komputerowe i przetwarzanie danych, Semestr II, Syste
wyklad wstepny plus proby badawcze 2
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
więcej podobnych podstron