
Regulacja cyfrowa
Wykład przygotowany przez pracownika
Instytutu Technik Wytwarzania PW
Wojciecha Kramarka

Regulacja cyfrowa
Regulacja cyfrowa (digital control) jest to (najkrócej) –
zastosowanie komputerów w systemach sterowania.
Rozwój i powszechność zastosowań regulacji cyfrowej
można podzielić na okresy:
- okres pionierski ok.1955r.,
- okres bezpośredniego sterowania cyfrowego ok. 1962r.,
- okres minikomputerów ok. 1972r.,
- okres mikrokomputerów oraz powszechne zastosowanie
sterowania cyfrowego ok. 1980r.,
- sterowanie rozproszone ok. 1990r. (distributed control).
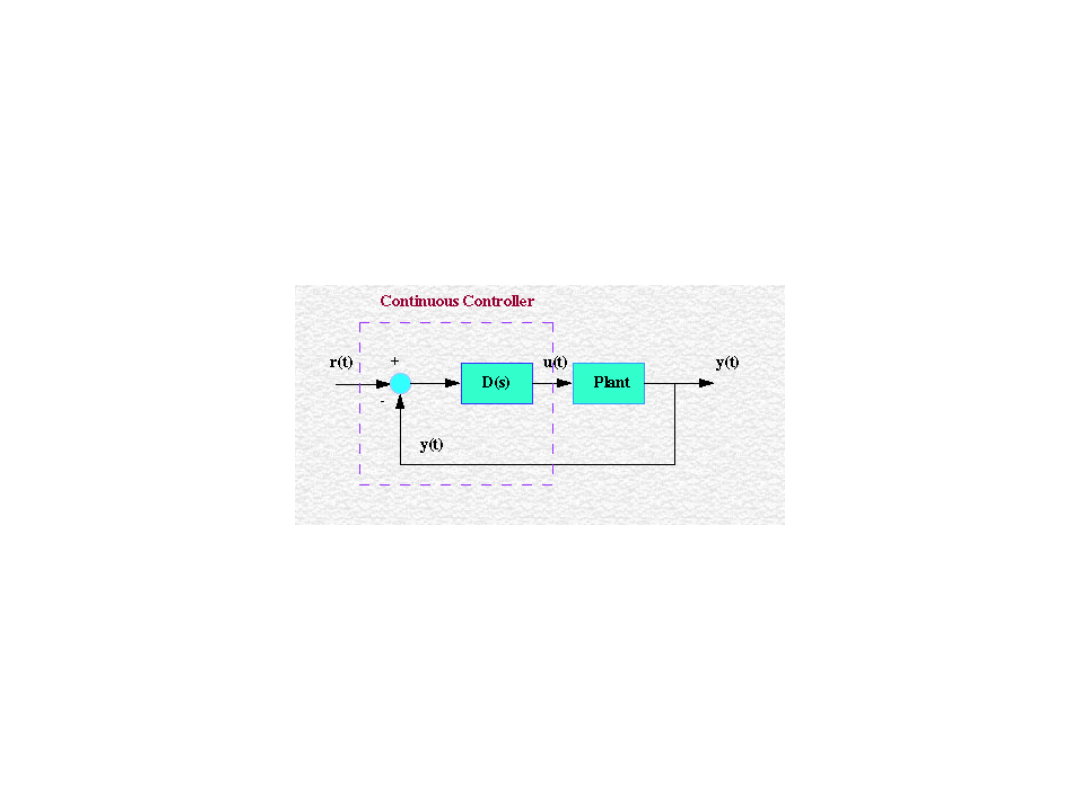
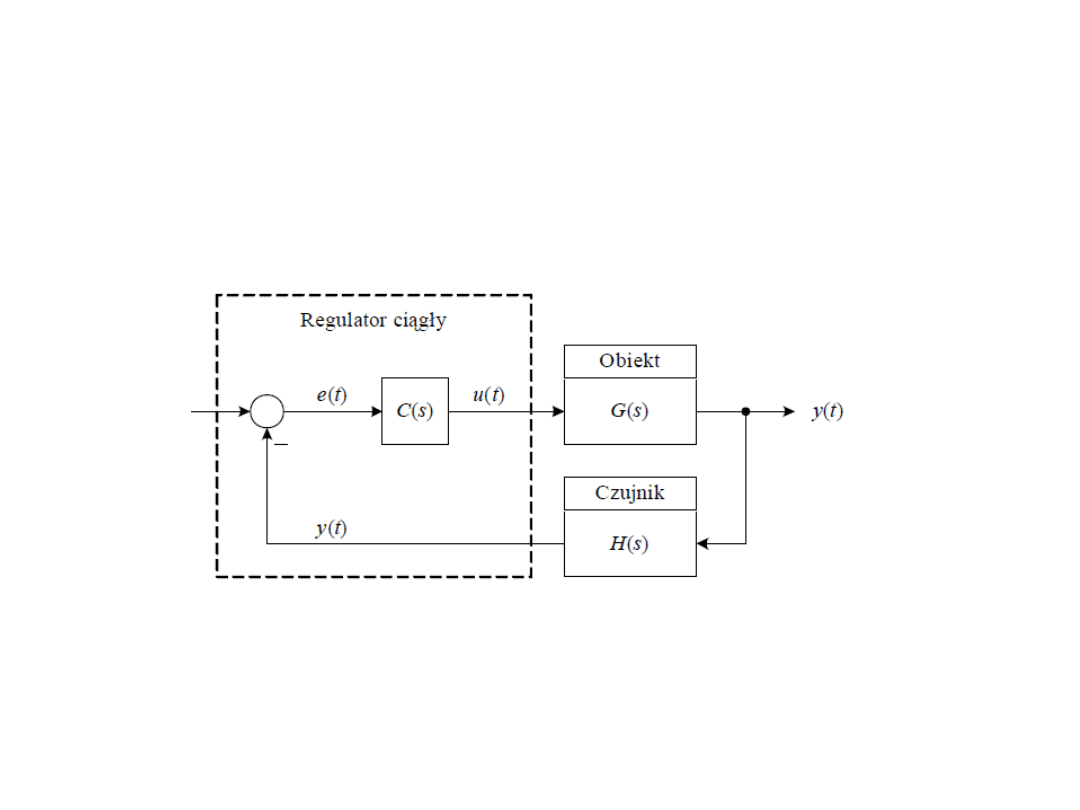
Analogowy układ regulacji
automatycznej
Układ z regulatorem analogowym, ciągłym

Zadania regulatorów
1. Porównanie wartości mierzonej wielkości regulowanej z
wartością
zadaną (określenie wartości sygnału uchybu regulacji).
2. Wytwarzanie wyjściowego sygnału sterującego o wartości
zależnej od uchybu regulacji, czasu występowania uchybu i
szybkości jego zmian.
3. Zapewnienie sygnałowi sterującemu postaci i mocy
potrzebnej do
uruchomienia urządzeń wykonawczych.
Regulatory przemysłowe często zawierają również urządzenia,
które umożliwiają:
a) nastawianie wartości zadanej (tzw. zadajniki),
b) przełączniki rodzaju pracy (ręczna, automatyczna),
c) urządzenia do sterownia ręcznego,
d) mierniki do pomiaru wielkości istotnych dla procesu regulacji

Rodzaje regulatorów
Podział regulatorów ze względu na rodzaj wykorzystywanej
energii:
-regulatory bezpośredniego działania (najstarsze);
-regulatory korzystające z energii pomocniczej: elektryczne,
pneumatyczne, hydrauliczne.
Podział regulatorów ze względu na postać sygnału
wyjściowego:
-regulatory z sygnałem wyjściowym nieciągłym: dwustawne,
trojstawne (inaczej dwupołożeniowe, trojpołożeniowe),
-regulatory dwustawne i trojstawne z korekcją;
-regulatory z sygnałem wyjściowym ciągłym typu P, PI, PD,
PID,
( elektryczne (analogowe lub cyfrowe), pneumatyczne i
hydrauliczne).
-regulatory uniwersalne bądź specjalizowane.

Sterowanie binarne
Sterowanie binarne- wykorzystuje się w nim sygnały
dwuwartościowe.
Sygnały te są reprezentowane przez dwie różne
lub
, np: włączony i wyłączony, czarny i biały,
stan zwarty i rozwarty lub po prostu 0 i 1. Większość
wykorzystuje sygnały dwuwartościowe,
a zatem są to układy sterowania
.
Do ważniejszych elementów składowych układów
sterowania binarnego, należą:
-p
,
-zawory przełączające,
-
-binarne elektroniczne obwody przełączające
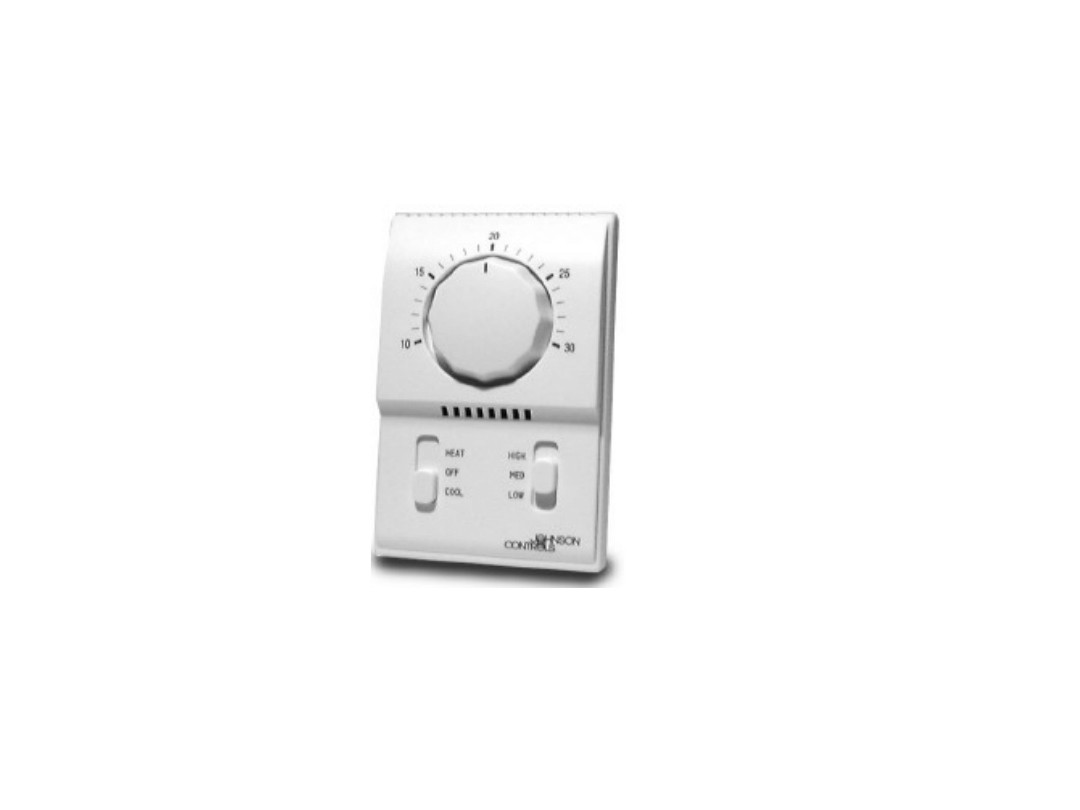
Przykład regulatora analogowego
Przykład regulatora cyfrowego
Przykład elektronicznego dwustawnego
regulatora

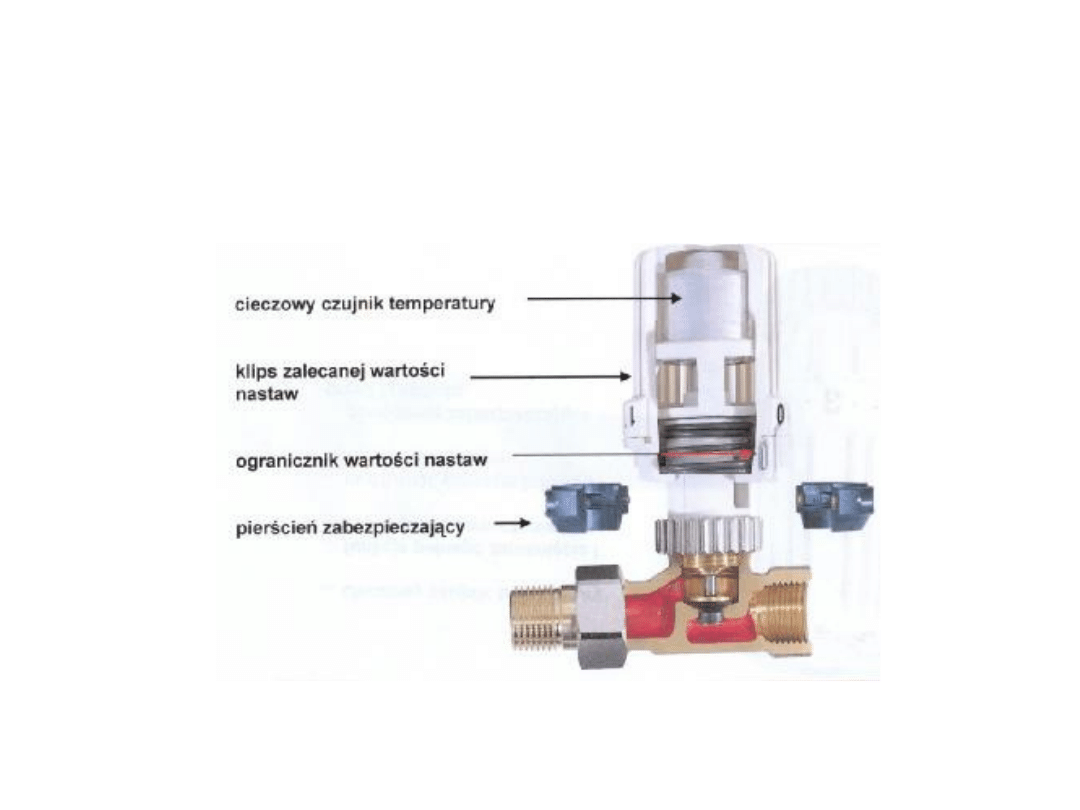
Regulatory bezpośredniego działania
Regulatory bezpośredniego działania pobierają energię
potrzebną do przestawiania zaworu nastawczego z procesu
regulowanego za pośrednictwem czujnika pomiarowego.
Zalety: prosta i zwarta budowa, niska cena i duża
niezawodność.
Wady: ograniczenie do regulacji stałowartościowej o małej
dokładności.
Typowe elementy regulatora: czujnik, nastawnik (zawór
regulacyjny)
i element wykonawczy (siłownik).
Typowe zastosowania: regulacja temperatury, ciśnienia,
strumienia,
poziomu.
Regulatory dwustawne i trójstawne
Istota regulacji polega na tym, że na wyjściu regulatora
sygnał może przyjmować tylko dwa stany: załączony lub
wyłączony (dla regulatora trojpołożeniowego trzy stany).
Regulatory nadają się do obiektów o dużych stałych
czasowych, gdzie nie jest istotna duża dokładność regulacji,
np. sterowanie temperaturą w obiektach cieplnych.
Zalety: prostota budowy i sterowania, wady: oscylacje (o
dużej amplitudzie) wartości wielkości regulowanej wokół
wartości zadanej.
Regulacja dwustawna
Regulatory dwustawne (dwupołożeniowe)
charakteryzują się dwoma, jednoznacznie określonymi
wartościami sygnału wyjściowego. Element wykonawczy ma
tylko dwa ustalone położenia, które zazwyczaj polega na
załączeniu lub wyłączeniu urządzenia.
Sterowanie dwupołożeniowe jest stosunkowo proste i
niedrogie i dlatego jest szeroko stosowane w przemyśle i w
urządzeniach gospodarstwa domowego.

Zastosowanie regulatora dwustawnego
Sygnał wyjściowy z regulatora oznaczany jest zazwyczaj jako
U(t), natomiast wejściem do regulatora jest wykonawczy
sygnał uchybu E. W sterowaniu dwupołożeniowym sygnał
wyjściowy U(t) przyjmuje jedną z dwóch wartości:
maksymalną i minimalną: w zależności od tego czy sygnał
wykonawczy uchybu jest dodatni lub ujemny.
Wielkości U1 i U2 są stałymi.
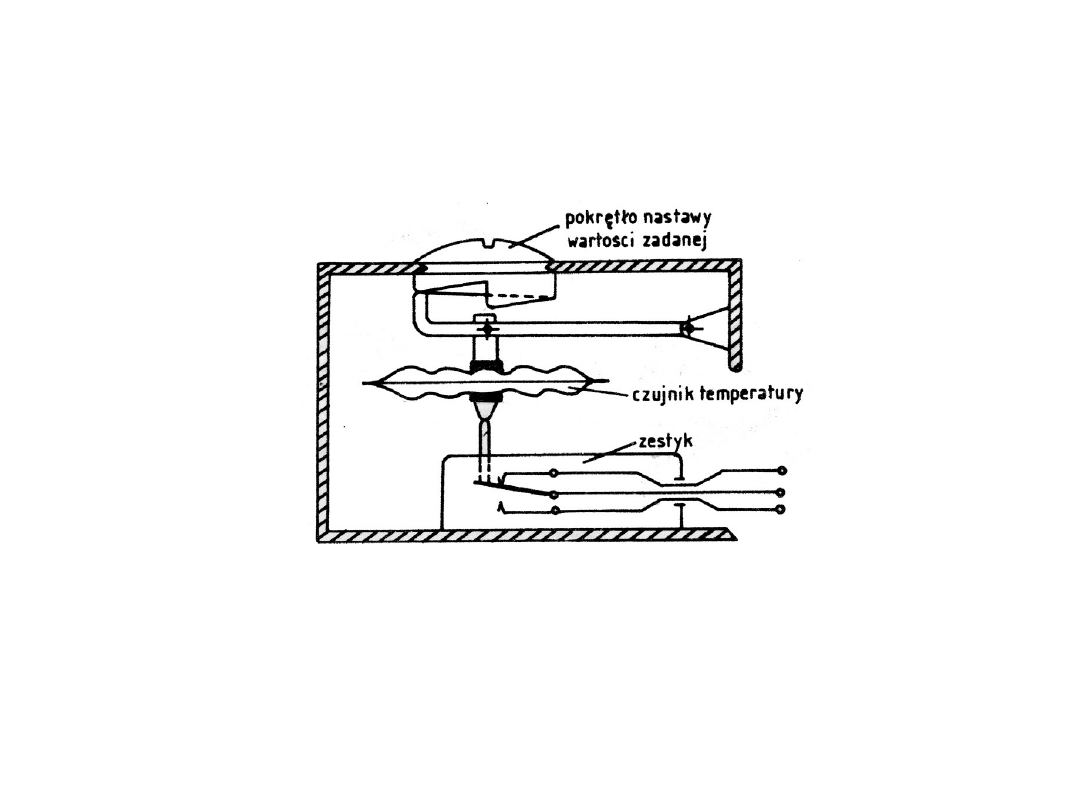
Przykładem zastosowania regulatora dwupołożeniowego jest
układ regulacji temperatury. Bimetaliczny sensor, element
porównujący wartość zadaną z wartością rzeczywistą oraz
przełącznik wykonawczy stanowią jedną, konstrukcyjną
całość. Jeżeli temperatura wzrasta ponad wartość zadaną, to
ogrzewana płytka bimetaliczna wygina się (pomiar wartości
rzeczywistej temperatury) i rozłącza obwód grzejny (działanie
wykonawcze). Jeżeli temperatura jest mniejsza od wartości
zadanej, to bimetal załącza obwód grzejny
.
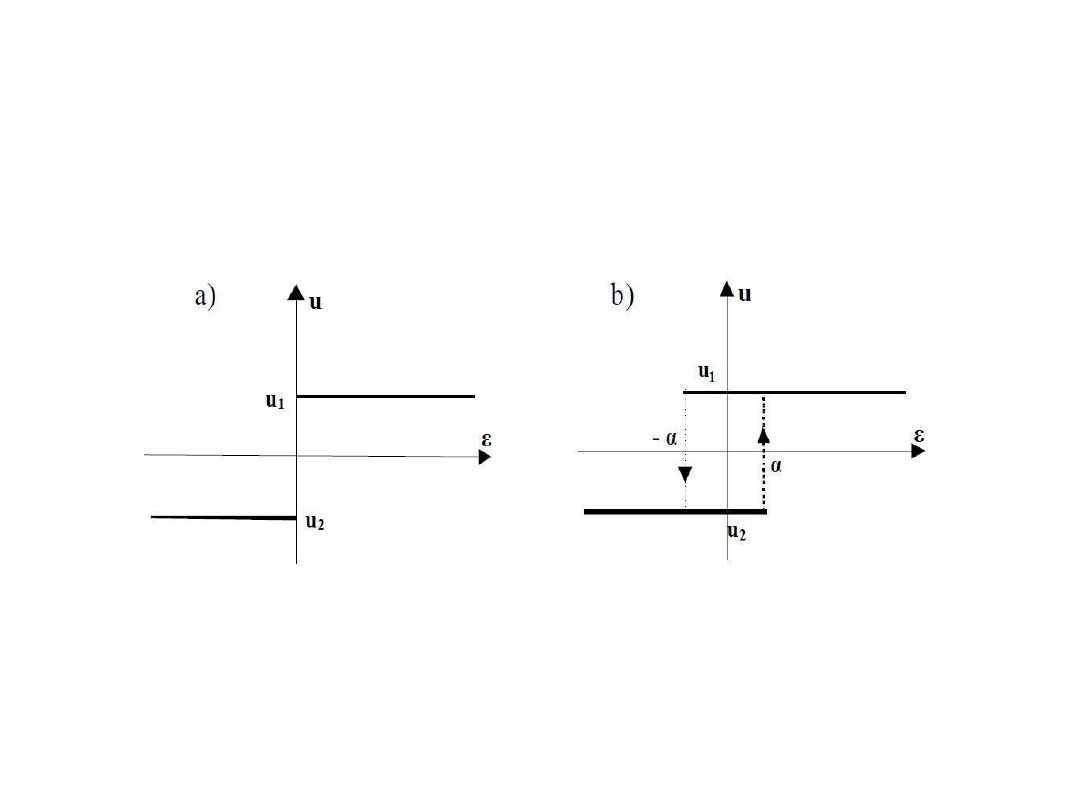
Charakterystyki regulatora dwustawnego :
a) idealnego, b) rzeczywistego
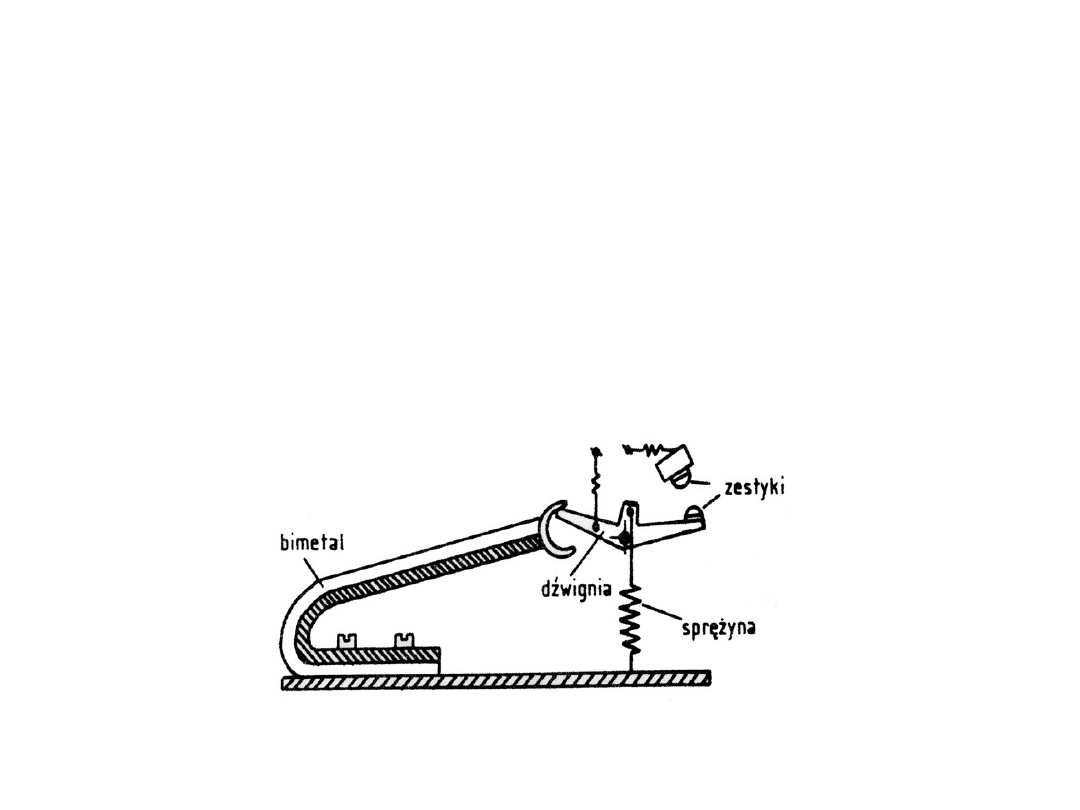
Przykład regulatora dwustawnego
Przykładem regulatora z zestykiem bezpośrednio
przełączanym przez czujnik jest wyłącznik bimetaliczny.
Działa on w taki sposób, że pod wpływem temperatury
zewnętrznej bimetal ulega odkształceniu i powoduje
przełączenie zestyku elektrycznego. Regulatory tego typu
są powszechnie używane w domowych urządzeniach
grzewczych (żelazkach, suszarkach itp.).
Układ regulacyjny dwustawny
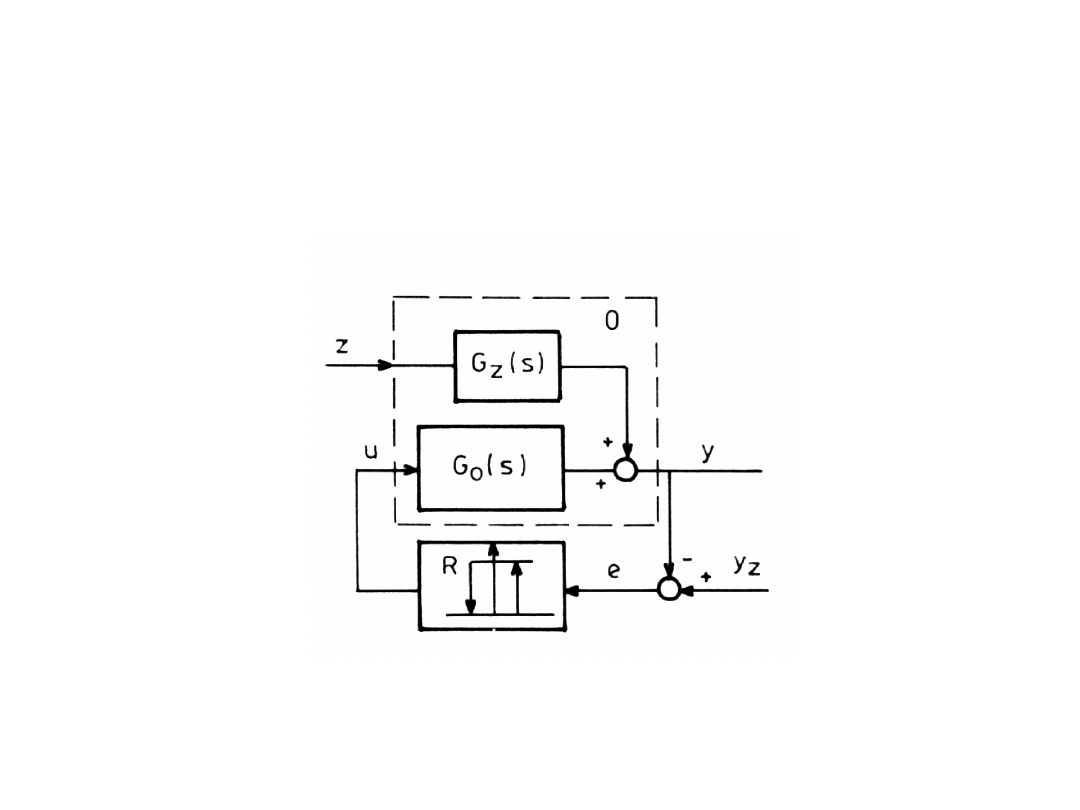
UAR z regulatorem dwustawnym
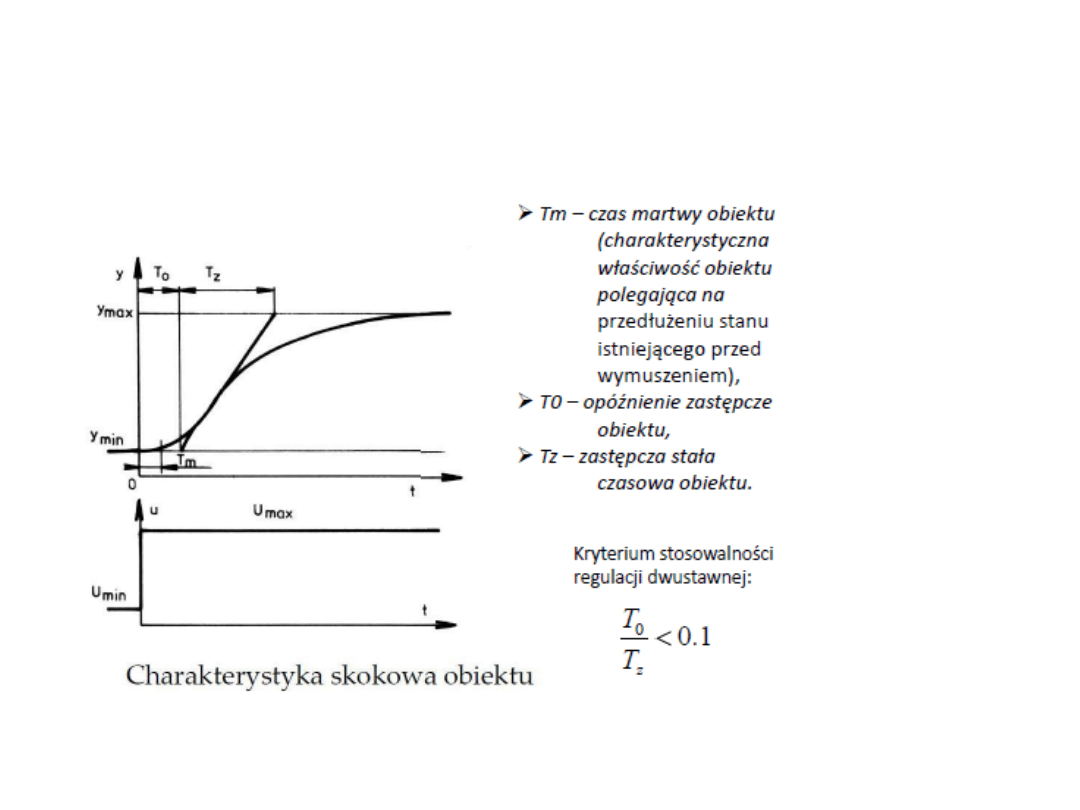
Obiekt statyczny z opóźnieniem

Odpowiedź obiektu
Jeżeli na wejście obiektu ( rysunek poprzedni)
załączymy Umax, to w czasie t → ∞ sygnał wyjściowy
osiągnie wartość ymax.
Odpowiednio dla u = Umin otrzymamy wartość ymin.
Z charakterystyki skokowej obiektu wyznaczono:
-Tm – czas martwy obiektu (charakterystyczna właściwość
obiektu polegająca na przedłużeniu stanu istniejącego
przed wymuszeniem),
-T0 – opóźnienie zastępcze obiektu,
-Tz – zastępcza stała czasowa obiektu
.
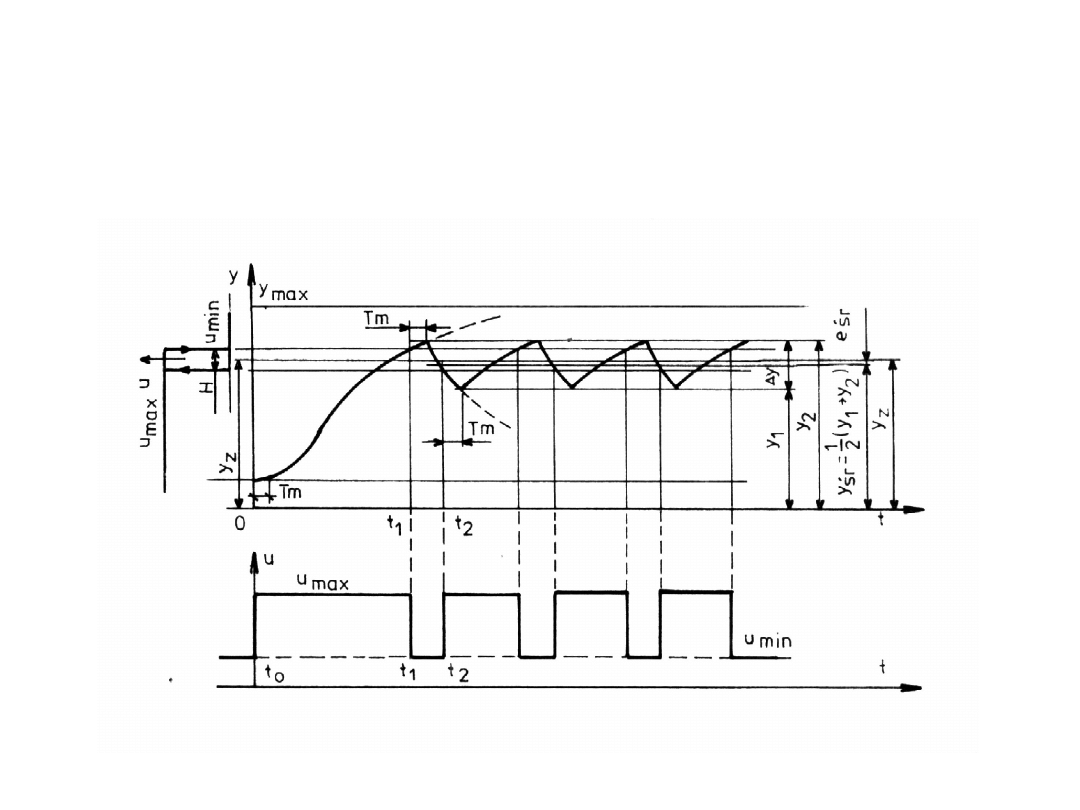
Przebieg temperatury w obiekcie

Przebieg temperatury
Wykres przebiegu temperatury w układzie regulacji
dwustawnej pokazano na poprzednim rysunku. W chwili t0
na wejście obiektu jest załączone napięcie Umax,
temperatura y w obiekcie narasta. W chwili t1 temperatura
obiektu osiągnęła wartość yz + H/2. W tym
momencie regulator wyłączy grzanie (u = Umin). Pomimo to
temperatura obiektu nadal narasta przez czas Tm, po czym
zaczyna maleć. W chwili t2 temperatura zmalała do
wartości yz – H/2. Regulator załączył grzanie (Umax).
Jednak temperatura nadal maleje i dopiero po czasie Tm
nastąpi w obiekcie ponowny jej wzrost. Omówiony cykl
powtarza się.
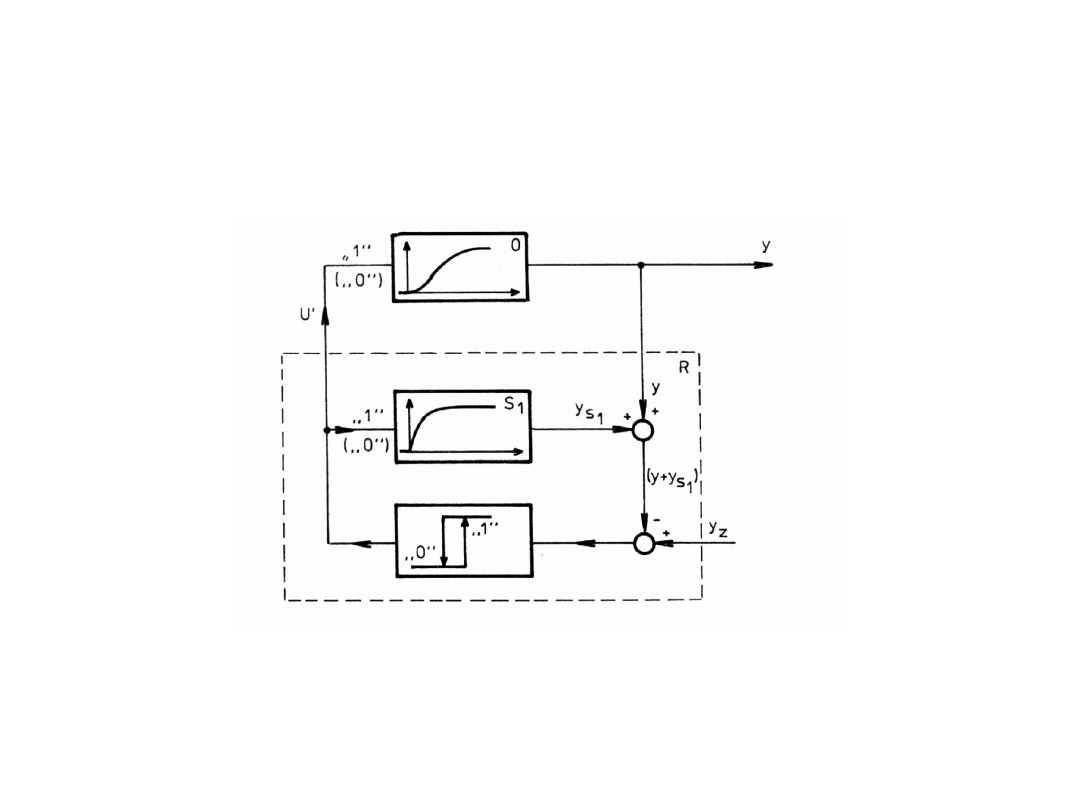
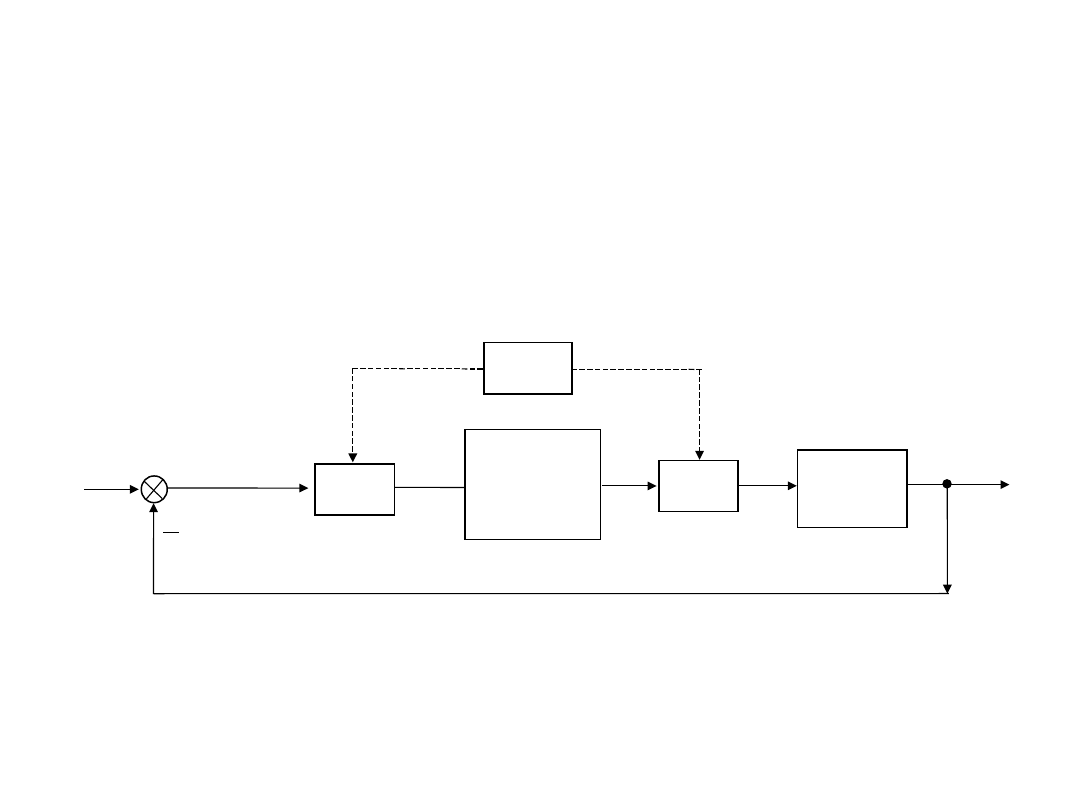
Regulatory dwustawne z korekcją

Przebiegi sygnału regulowanego
Zmniejszenie amplitudy oscylacji wielkości
regulowanej, w układzie regulacji dwustawnej, można
uzyskać dzięki zastosowaniu regulatora z korekcyjnym
sprzężeniem zwrotnym. Schemat blokowy układu regulacji
dwustawnej z inercyjnym sprzężeniem zwrotnym pokazano
na poprzednim rysunku.
Stała czasowa T członu w sprzężeniu zwrotnym
powinna być znacznie mniejsza od zastępczej stałej
czasowej Tz obiektu regulacji.. Jak widać, po zastosowaniu
pojedynczego sprzężenia zwrotnego wzrosła częstotliwość
oscylacji, zmalała amplituda wahań, wystąpiła natomiast
różnica między wartością średnią yśr
a zadaną yz
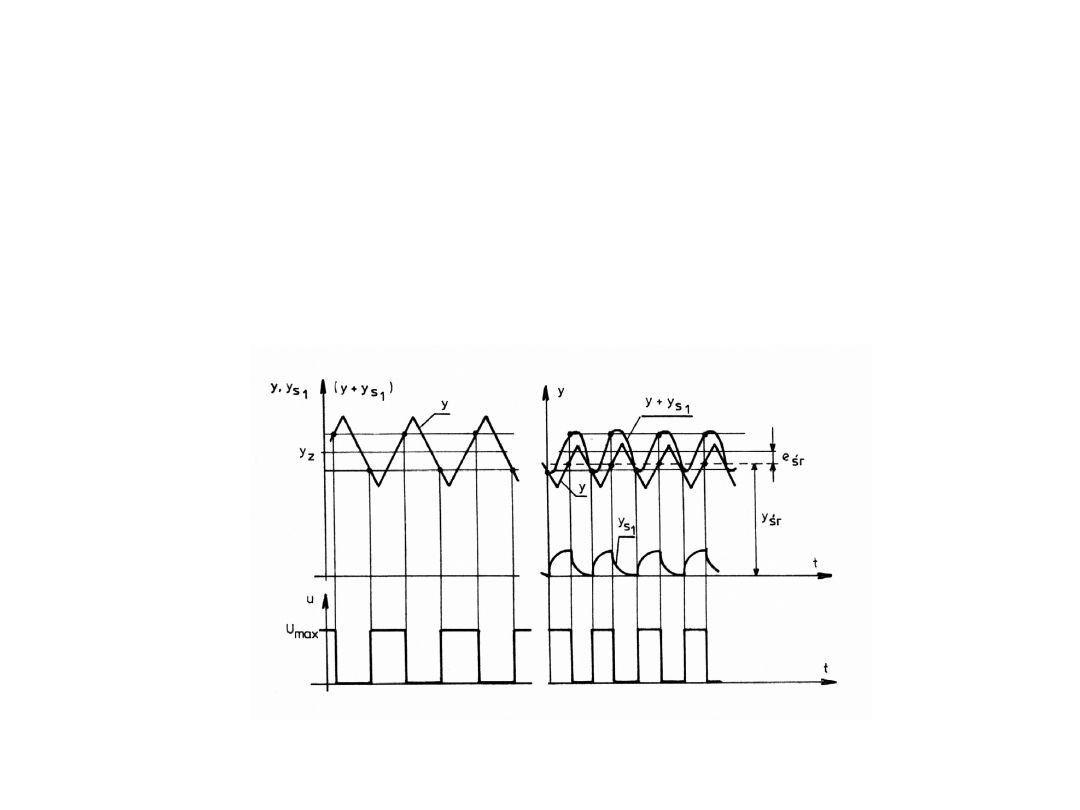
Porównanie przebiegów
Porównanie przebiegu regulacji w układzie regulacji
dwustawnej bez sprzężenia zwrotnego z przebiegami w
układzie z pojedynczym sprzężeniem zwrotnym.
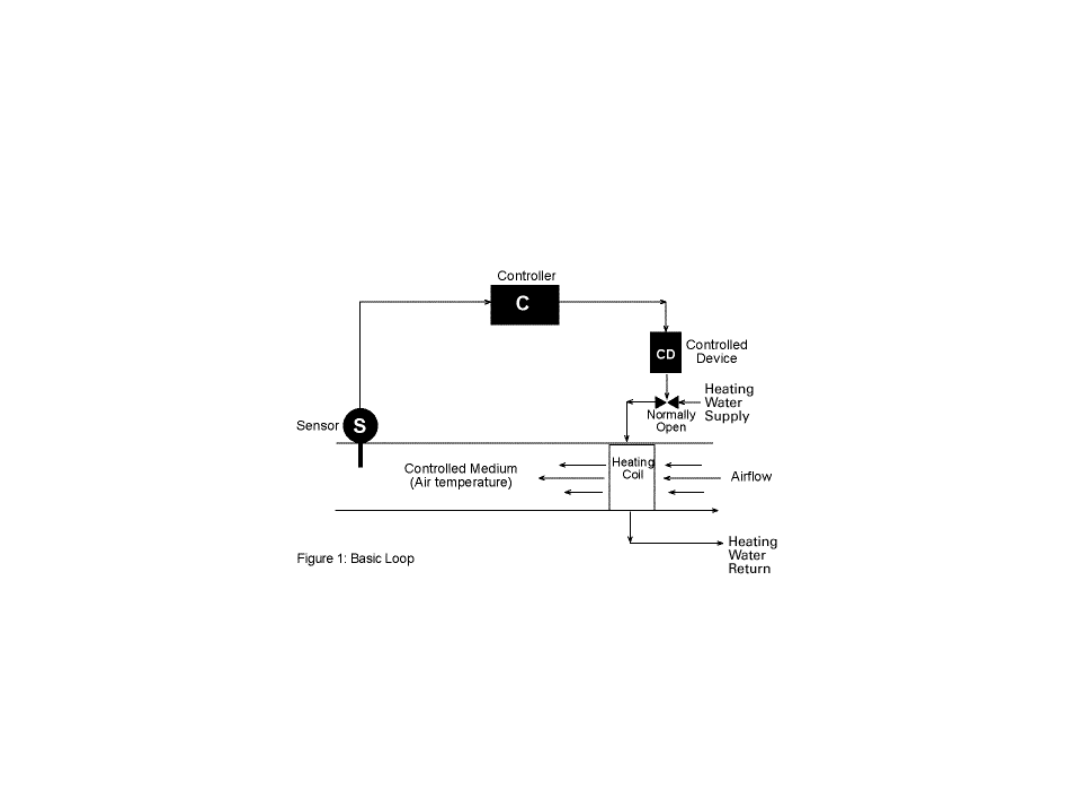
Analogowy UAR

Elementy układu regulacyjnego
Układ regulacyjny pokazany powyżej składa się z trzech
głównych komponentów: sensory, regulator oraz nastawnik
oddziałujący na obiekt (proces). Wielkością kontrolowaną w
omawianym układzie jest temperatura.
Układ pomiarowy (sensor) określa stan wielkości
kontrolowanej, regulator przetwarza dane natomiast nastawnik
wykonuje polecenia płynące z regulatora. W układzie jako
regulator może występować regulator płynowy, mechaniczny,
elektryczny lub elektroniczny. W rozważanym przypadku regulator
jest urządzeniem hardwerowym o określonych wymiarach, masie i
mocy.

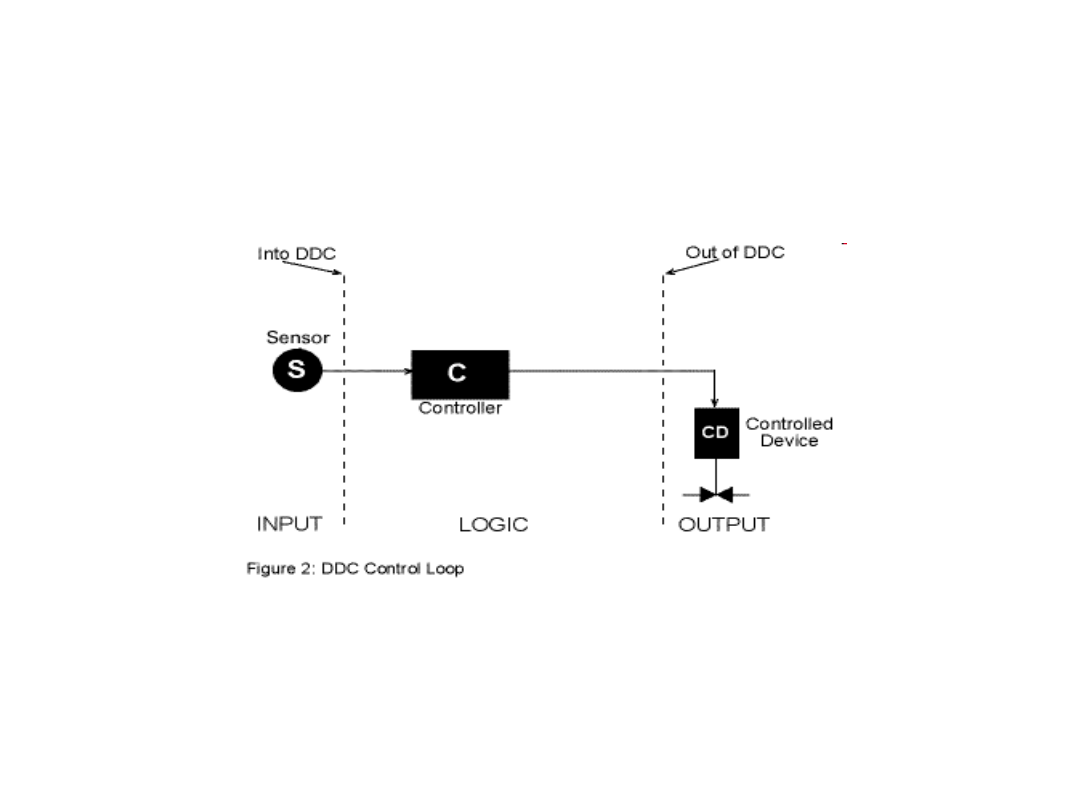
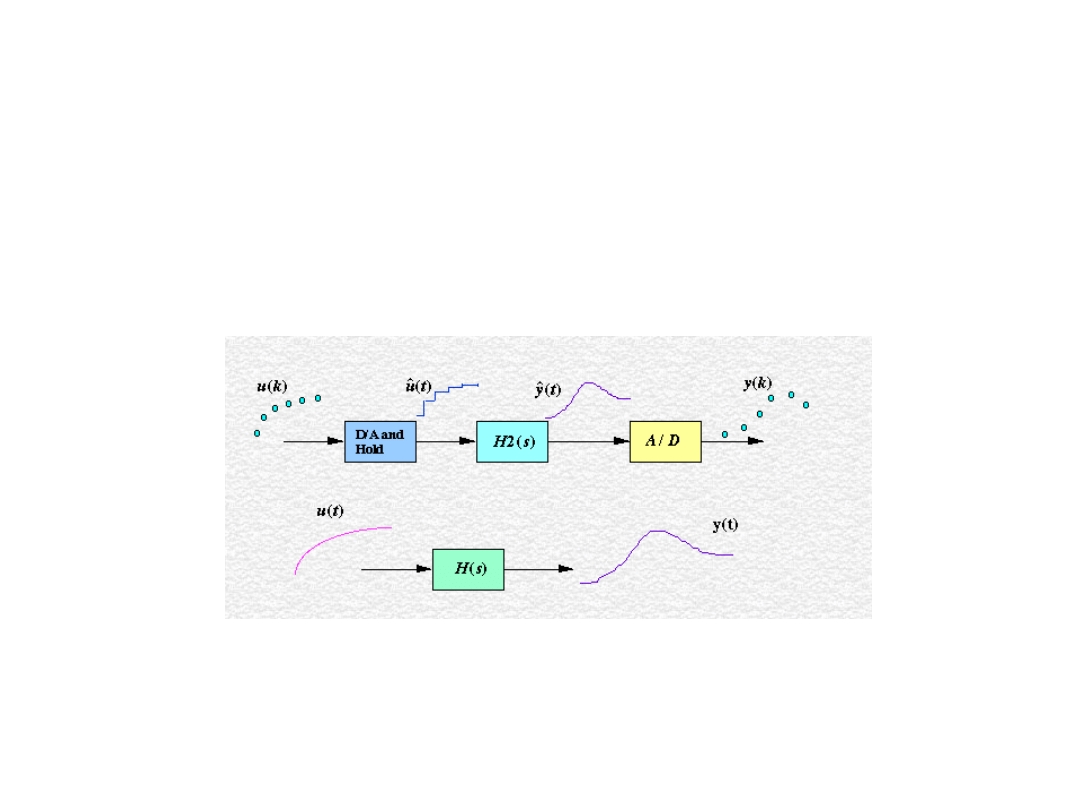
Regulacja cyfrowa
W układzie regulacji analogowej, przedstawionym na
wcześniejszym schemacie, można zastąpić regulator
analogowy regulatorem cyfrowym. Regulator ten będzie
spełniał te same zadania jak regulator analogowy.
Podstawowa różnica pomiędzy tymi regulatorami polega na
tym, że regulator cyfrowy do działania potrzebuje sygnałów
dyskretnych zamiast sygnałów ciągłych.
Direct Digital Control Systems
Systemy regulacji cyfrowej

Różnice pomiędzy regulatorami
analogowymi i cyfrowymi
Podstawowa różnica pomiędzy regulatorami
analogowymi i cyfrowymi polega na tym, że w :
-regulatorach analogowych sygnały analogowe ulegają
ciągłej obróbce a w regulatorach cyfrowych następuje
zamiana sygnału analogowego na cyfrowy, następnie
obróbka sygnału i ponowna zamiana na sygnał analogowy.
Ponadto sygnały w regulatorach cyfrowych są
próbkowane co ustalony odstęp czasu (cykliczny charakter
pracy).
Obliczenia cyfrowe wykonywane są tylko dla
dyskretnego czasu zamiast w sposób ciągły; potrzebny jest
więc impulsator po stronie wejściowej i ekstrapolator po
stronie wyjściowej.

Sensory
Sensory mają za zadanie mierzyć wielkość kontrolowaną
albo inne wielkości wejściowe dokładnie i powtarzalnie.
Sensory (czujniki) są stosowane do pomiaru napięcia, prądu,
temperatury, ciśnienia, przepływu, stężenia gazów, itp..
Oprócz pomiaru wielkości kontrolowanych przez regulator
czujniki dostarczają informacji o innych stanach maszyny
lub procesu, które mogą być istotne przy wyznaczaniu
sygnałów wyjściowych regulatora. Dodatkowe informacje
które mogą w pewnych sytuacjach wpływać na logikę
decyzji regulatora mogą dotyczyć pewnych parametrów jak
przepływ wody, zadymienie , pożar , graniczne wielkości
pewnych parametrów. Itp…
Sensory są bardzo ważną częścią układu regulacji, będąc
zarazem słabym ogniwem tego układu.

Regulatory
Regulator odczytuje sygnały płynące z czujników,
przetwarza te informacje zgodnie z pewnym algorytmem
sterowania wbudowanym w niego i powoduje wytworzenie
pewnych działań sterujących. Wytworzony sygnał sterujący
może być wysłany bezpośrednio do nastawnika lub może
być wysłany po przejściu przez dodatkowe układy logiczne.
Rodzaje regulatorów zależą od wbudowanych w nie
algorytmów. Najczęściej są wykorzystywane następujące
rodzaje regulatorów :
• -dwupozycyjne (dwustawne),
• -proporcjonalne,
• -proporcjonalno-całkujące,
• -proporcjonalno-całkująco-różniczkujące.

Nastawniki
Nastawniki (urządzenia wykonawcze) są urządzeniami
wykonującymi polecenia regulatora albo układów
logicznych. Nastawniki zmieniają stan wielkości
regulowanych przez zmianę sygnałów sterujących
urządzeniami końcowymi. Przykładami tych urządzeń mogą
być zawory dwupozycyjne lub analogowe, przekaźniki
elektryczne, pompy, wentylatory, grzałki lub silniki o
regulowanej prędkości obrotowej służące do napędu tych
elementów.

Definicja Direct Digital Control DDC
(regulacja cyfrowa)
Regulacja cyfrowa DDC składa się z
mikroprocesorowych regulatorów w których logika regulacji
jest wykonywana przez software. Przetworniki analogowo-
cyfrowe przekształcają analogowe wartości sygnałów na
sygnały cyfrowe zrozumiałe dla mikroprocesora
W większości złożonych systemów regulacji programy
softwarowe są przekazane do rozproszonych regulatorów
aby wyeliminować konieczność ciągłej wymiany informacji
pomiędzy nimi. Nadrzędny komputer jest stosowany
głównie do monitorowania systemu, przechowywania kopii
programów oraz do zapisu alarmowych sygnałów.
Kalibracja czujników może być prowadzona
matematycznie, przez co zmniejszamy ilość roboczogodzin
na jej prowadzenie. Programy oraz sposób programowania
są systematycznie doskonalone stając się bardziej
przyjacielskie dla użytkownika.

Zalety DDC
Cyfrowe układy scalają regulację, sterowanie i
optymalizację.
Do istotnych zalet układów DDC należy możliwość:
- realizacji dowolnie złożonych algorytmów sterowania,
włącznie ze sterowaniem optymalnym i adaptacyjnym,
- ciągłego pomiaru i rejestracji wartości dowolnych
parametrów procesu,
- przetwarzania danych pomiarowych,
- wykrywania i sygnalizacji stanów awaryjnych,
- zwiększenia dokładności sterowania na skutek
dokładniejszej identyfikacji obiektu regulacji.
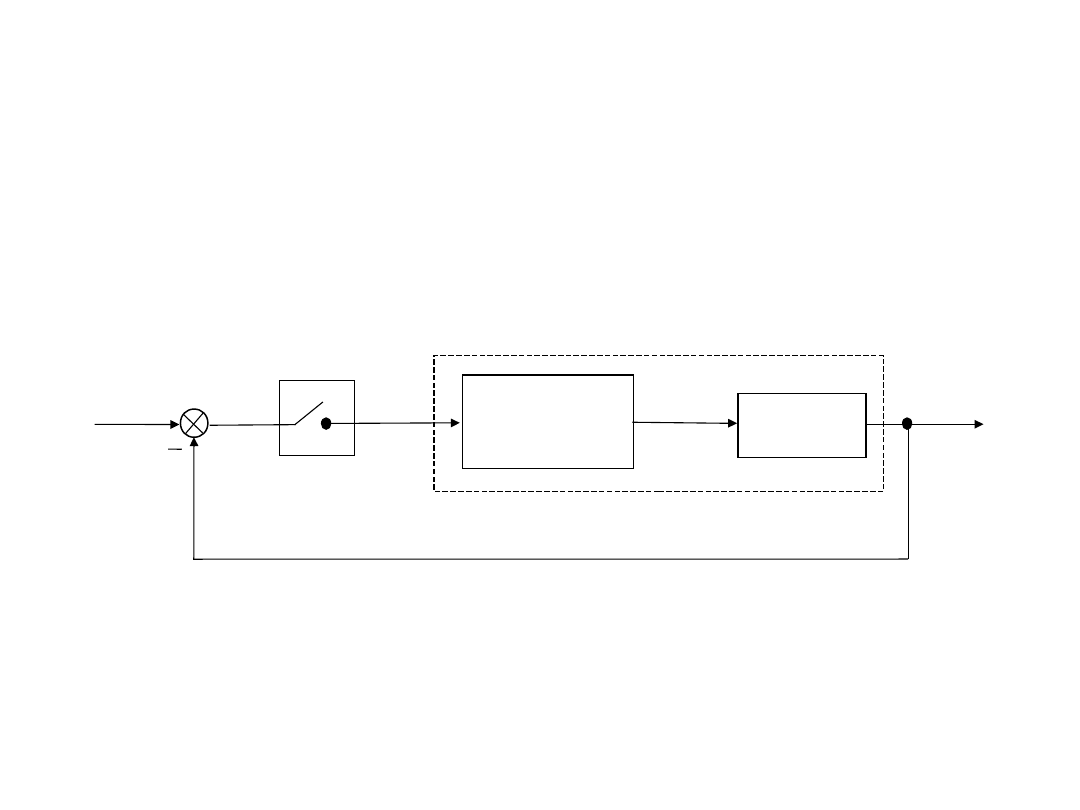
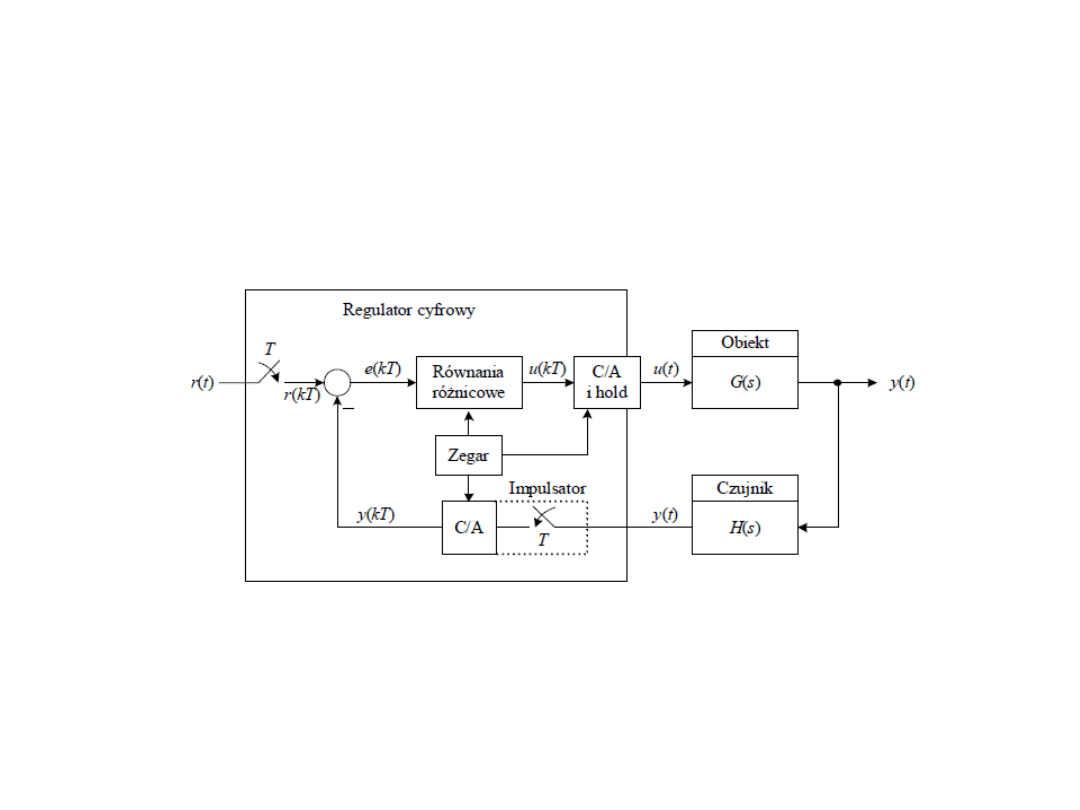
Schemat blokowy cyfrowego układu regulacji
Schemat blokowy
A/D
sygnał
analogowy
Zegar
Cyfrowy
algorytm
regulacji
Obiekt
(proces)
D/A
y
y
0
e
e
d
u
d
u
a
y
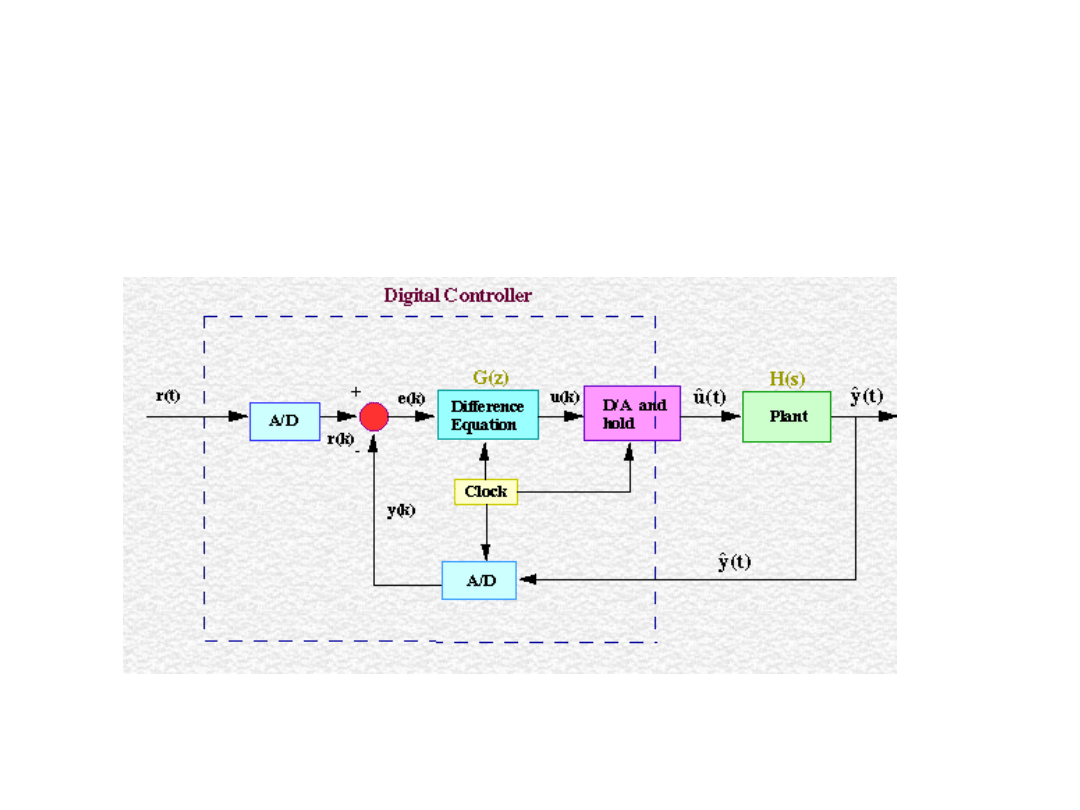
Schemat blokowy cyfrowego układu
regulacji
Przepływ sygnałów w układzie
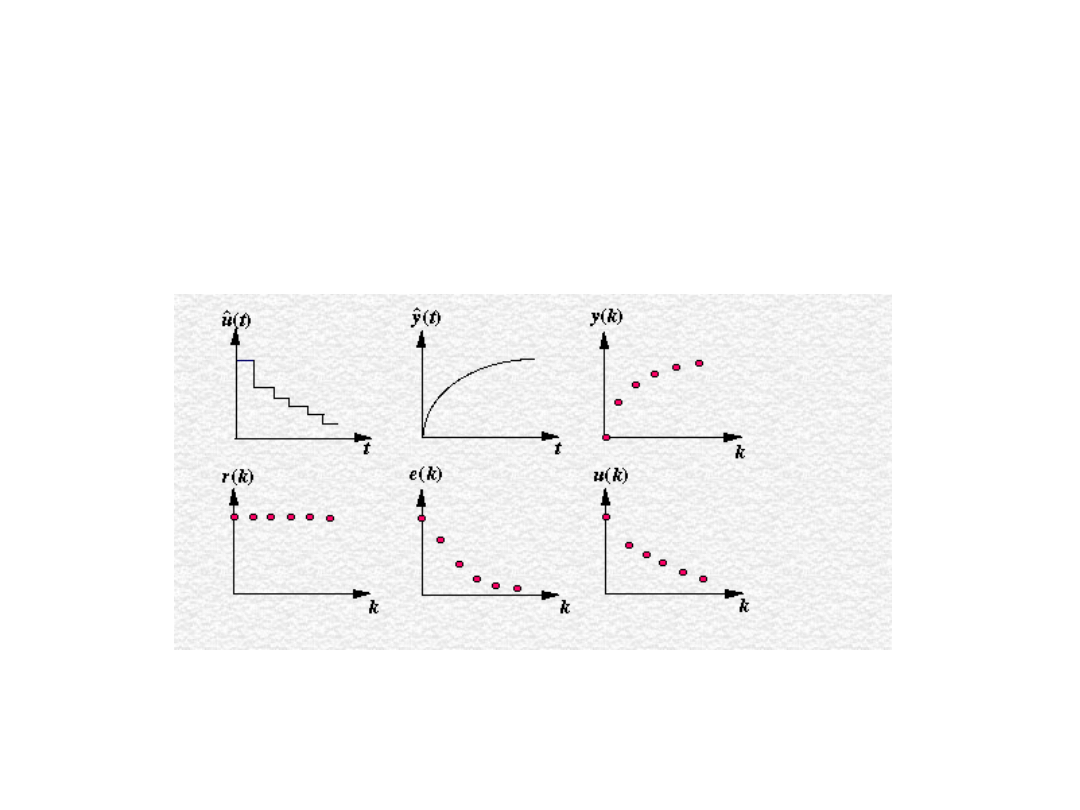
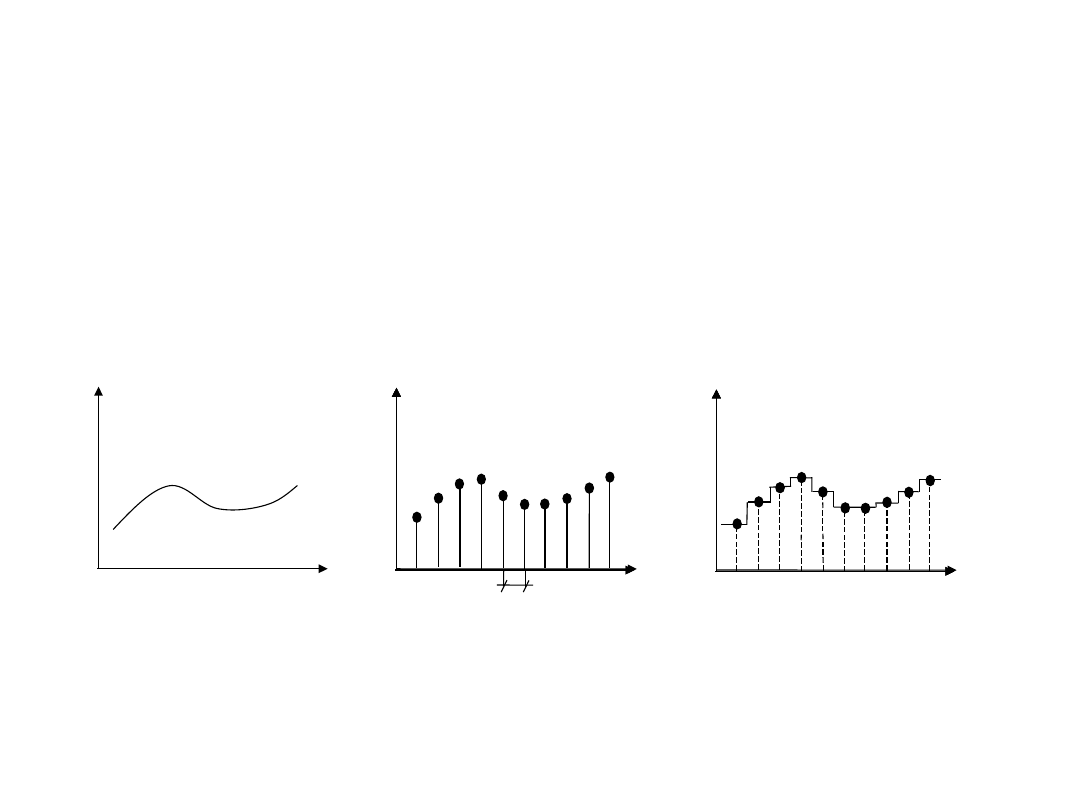
Przebiegi sygnałów
Przebiegi sygnałów ciągłych i dyskretnych
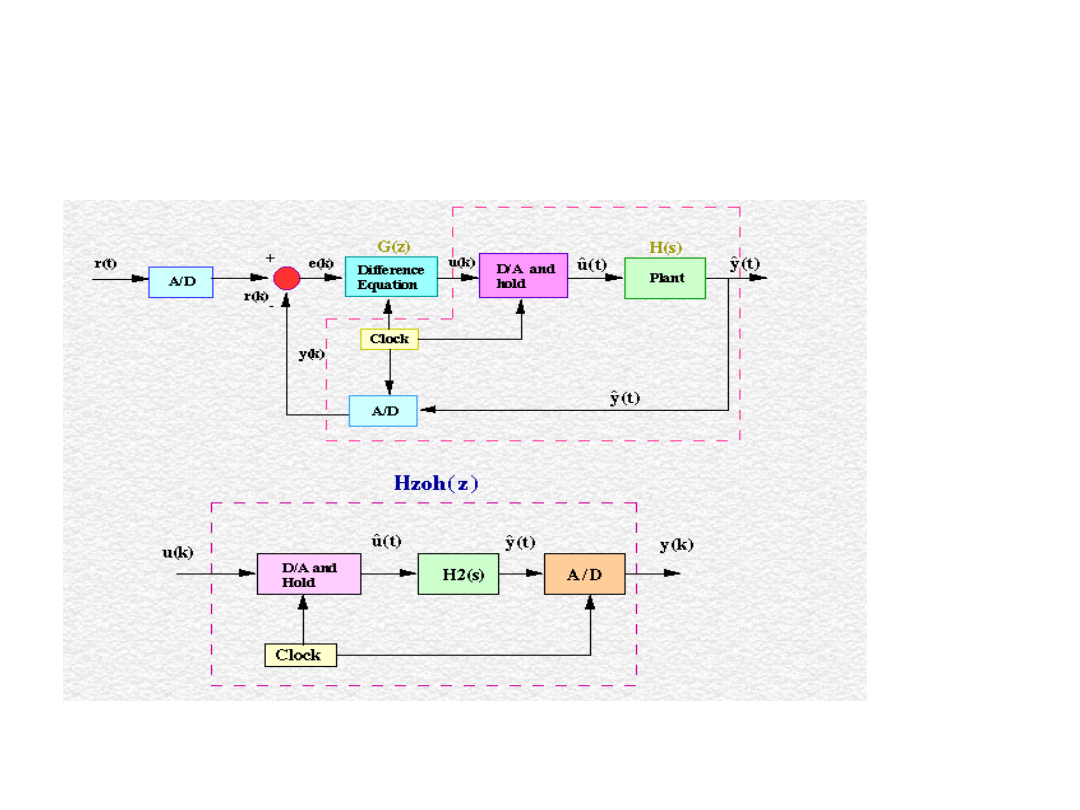
Układ regulacji dyskretnej z ekstrapolatorem

Układy dyskretne
Układami dyskretnymi regulacji automatycznej nazywa
się układy, w których strumień informacji jest przekazywany
za pomocą sygnałów dyskretnych (nieciągłych). Mogą one
być dyskretne w poziomie (realizuje to tzw. quantizer –
rzadko stosowane) lub dyskretne w pionie – w czasie (tutaj
bardziej precyzyjne jest określenie system z czasem
dyskretnym – najczęściej stosowane).

Układy dyskretne
Sygnały dyskretne w czasie nazywa się sygnałami
impulsowymi, a układ automatycznej regulacji operujący
takimi sygnałami nazywa się impulsowym układem
automatycznej regulacji. Impulsowe układy regulacji to
takie, w jakich informacja jest przekazywana tylko w
chwilach impulsowania.
Klasycznym układem regulacji impulsowej są układy
sterowane mikroprocesorowo, w których mikroprocesor
oblicza wartości sygnałów sterujących lub sygnałów
regulacji, generując wynik w postaci ciągu impulsów.

Przetworniki analogowo-cyfrowe
W procesach przemysłowych dominują sygnały
analogowe
( przemieszczenie, prędkość, temperatura, przepływ,
ciśnienie ) i aby mogły być wykorzystane w systemie
cyfrowym ( z komputerem jako regulatorem cyfrowym),
powinny być przetworzone na sygnały cyfrowe.
Sygnały cyfrowe otrzymuje się przez operacje
próbkowania oraz kwantowania sygnałów analogowych,
które następnie są kodowane.
Układ impulsowy
Schemat blokowy jednowymiarowego (SISO) układu
impulsowego
Element formujący
Proces
Impulsator idealny
część ciągła
e(t)
y
0
(t)
e
*
(t)
e
1
(t)
y(t)
Działanie impulsatora
Impulsator idealny przekształca ciągłą funkcję czasu
e(t) w ciąg impulsów Diraca e* (t) , przesuniętych względem
siebie o okres impulsowania Ts , o polach impulsów równych
wartościom funkcji e(t) w chwilach impulsowania t=nTs
(n=0,1,2,…). Działanie idealnego impulsatora pokazuje
rysunek.
e(2T
s
)
e(t)
e(4T
s
)
e(T
s
)
e(0)
0
T
s
2T
s
3T
s
4T
s
t
e(t)
e
*
(t)
e
*
(t) (impulsy Diraca)
0
T
s
2T
s
3T
s
4T
s
n
e
(0
)
δ
(t
) e(
T
s
)
δ
(t
-
T
s
)
e
(2
T
s
)δ
(t
-
2
T
s
)
e
(3
T
s
)δ
(t
-
3
T
s
)
e
(4
T
s
)δ
(t
-
4
T
s
)

Ekstrapolator
Sygnał czasu przekształcony przez impulsator na ciąg
impulsów jest podawany na ekstrapolator czyli element
formujący. Ekstrapolatorem (elementem podtrzymującym)
jest najczęściej układ o transmitancji:
-gdzie Ts oznacza okres impulsowania.
Odpowiedzią elementu o transmitancji K1(s) na ciąg
impulsów Diraca e*(t) jest funkcja schodkowa e1(t).
s
e
s
K
s
sT
1
)
(
1
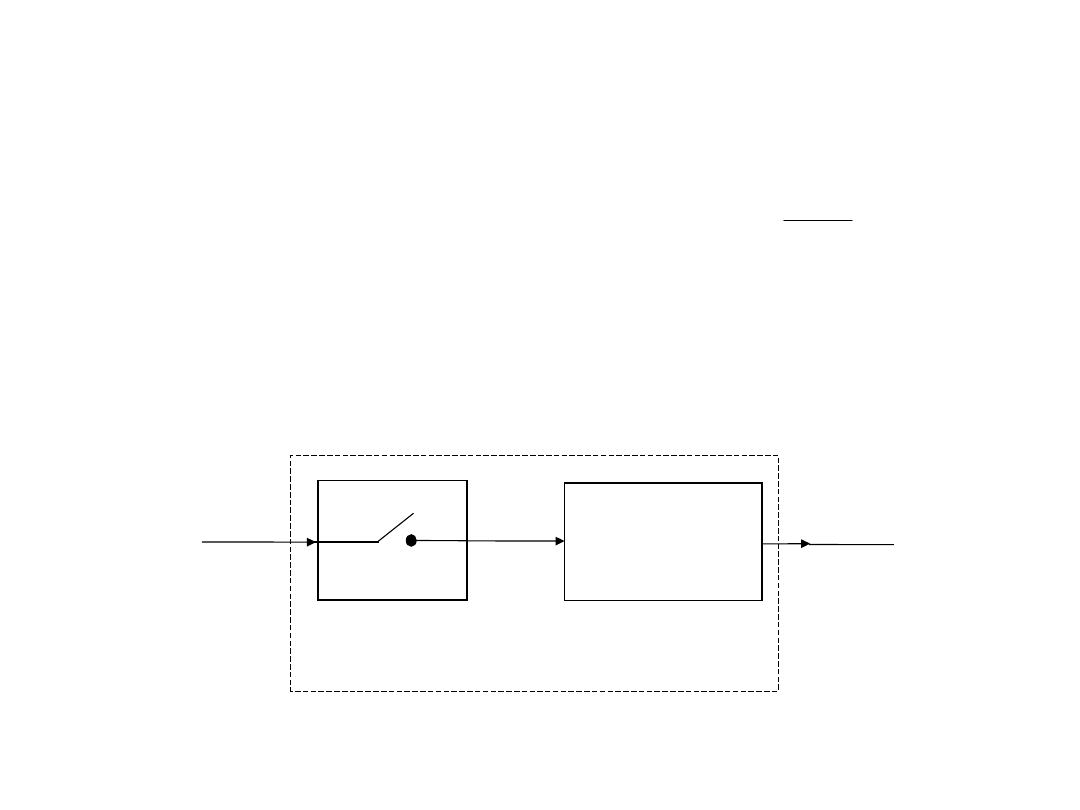
Ekstrapolator zerowego rzędu
• Impulsator idealny i element o transmitancji
nazywa
się ekstrapolatorem zerowego rzędu - Zero Order Hold
(ZOH) Taki blok dokonuje rekonstrukcji sygnału e*(t), która
polega na aproksymacji wielomianem zerowego rzędu
(aproksymacja prostokątna).
e(t)
e
*
(t)
K
1
(s)
element
formujący
e
1
(t)
impulsator idealny
s
e
s
K
s
sT
1
)
(
1
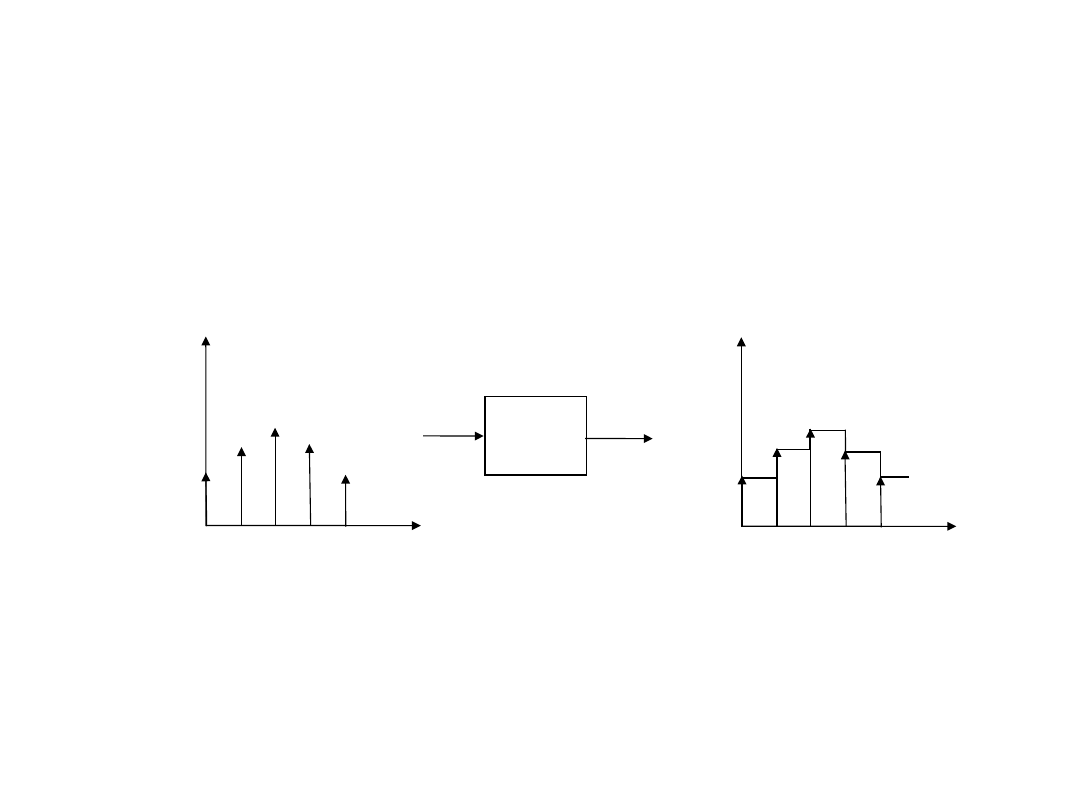
Działanie ekstrapolatora
Przebieg w dziedzinie czasu sygnału wychodzącego z
ekstrapolatora
e
*
(t)
0
T
s
2T
s
3T
s
4T
s
t
e
*
(t)
e
1
(t)
e
1
(t)
t

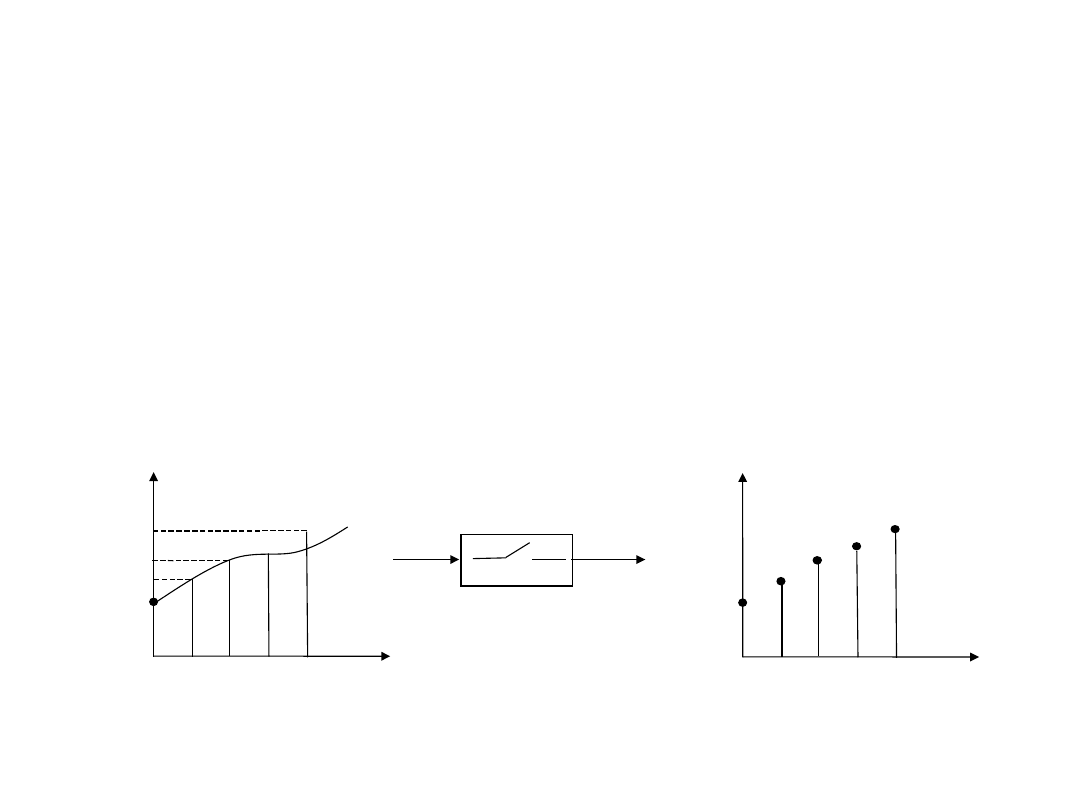
Próbkowanie i kwantowanie
Próbkowanie to przetworzenie sygnału analogowego
ciągłego na sygnał dyskretny, o wartościach równych
sygnałowi ciągłemu w chwilach próbkowania. Pobrany ciąg
próbek powinien umożliwiać jak najwierniejsze odtworzenie
całego przebiegu sygnału analogowego. Odstępy między
kolejnymi chwilami próbkowania są jednakowe i noszą
nazwę okresu próbkowania T .
Kwantowanie polega na przyporządkowaniu
jednakowych wartości sygnału między dwiema różnymi
wartościami sygnałów impulsowych.
Sygnał przed i po próbkowaniu
Wykresy: sygnał analogowy e(t), oraz sygnał e(i) po
wykonaniu próbkowania i operacji kwantowania.
e(t)
e(i)
e(i)
n
T
s
n
t
Kodowanie
Sygnał wyjściowy przetwornika A/D jest kodowany.
Najczęściej jest to kod dwójkowy prosty ( nazywany też
kodem B lub kodem naturalnym). Innym podstawowym
kodem jest kod BCD (Binary Coded Decimal – kod
dwójkowo-dziesiętny, kod 8421).
W kodzie tym każda cyfra liczby zapisanej w układzie
dziesiętnym jest przedstawiona w kodzie dwójkowym.
Przebiegi sygnałów
• Przebiegi sygnałów ciągłych i dyskretnych
Układ cyfrowy
• Podstawowy schemat blokowy układu sterowania, układ
ciągły

Funkcje dyskretne
Z dowolnej funkcji ciągłej e(t) można
otrzymać funkcję dyskretną e(nT ) lub e(n) dla
Ts=1, gdy wezmie się pod uwagę tylko ciąg
wartości tej funkcji e(0), e(Ts), e(2Ts),… w
chwilach impulsowania t=0,Ts,2Ts,3Ts,…
Układ cyfrowy
• Podstawowy schemat blokowy układu sterowania, układ
cyfrowy

Równania różniczkowe i różnicowe
W układach sterowania coraz częściej stosowane są
regulatory cyfrowe i stąd konieczność określania równań,
które opisują sygnały cyfrowe i dyskretne. Tak jak równania
różniczkowe stosowane są do opisu układów z sygnałami
analogowymi, tak równania różnicowe stosowane są dla
układów z sygnałami dyskretnymi lub cyfrowymi. Równania
różnicowe używane są również do aproksymacji równań
różniczkowych w celu zapisania ich w programach
komputerowych wykorzystywanych w różnego rodzaju
symulacjach.
Rachunek operatorowy Laplace’a może być stosowany
do rozwiązywania liniowych równań różniczkowych
zwyczajnych, natomiast transformata Z jest metodą
wykorzystywaną do
rozwiązywania liniowych równań różnicowych i układów
liniowych z danymi dyskretnymi lub cyfrowymi. Zmienna z
jest liczbą zespoloną.
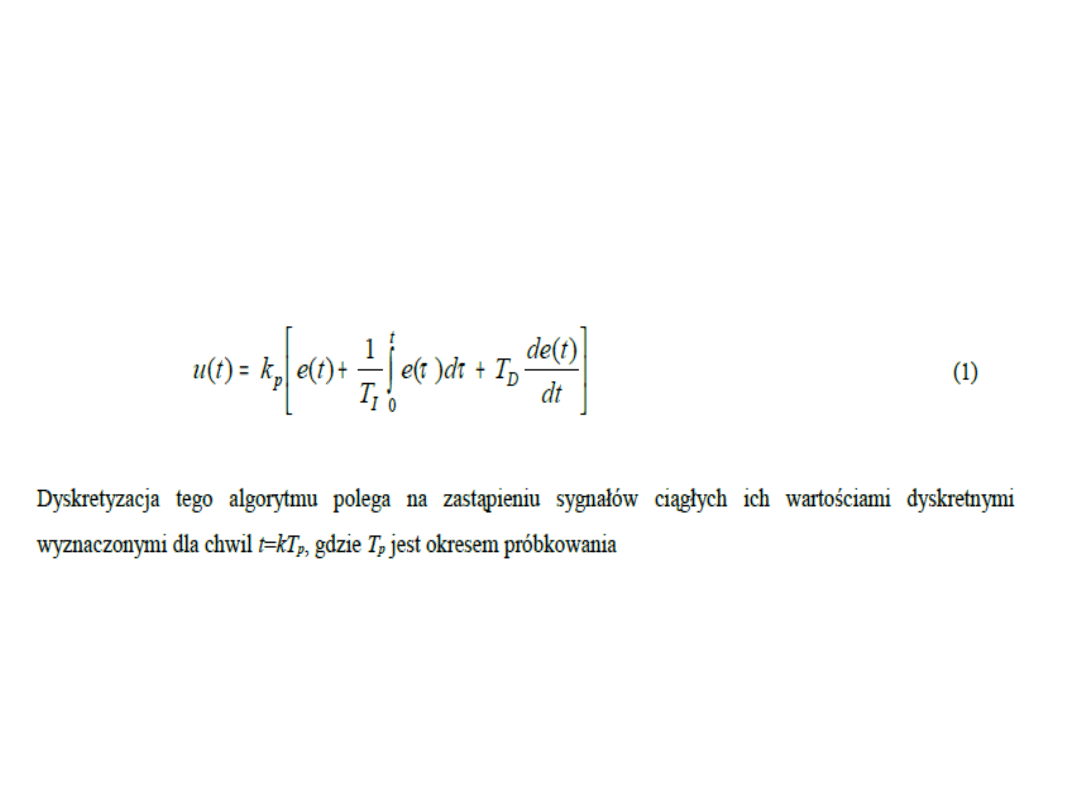
Algorytm PID
• Uniwersalnym algorytmem regulatorów o działaniu ciągłym jest
algorytm PID, określany jako działanie
• proporcjonalno – całkująco – różniczkujące opisywany równaniem.
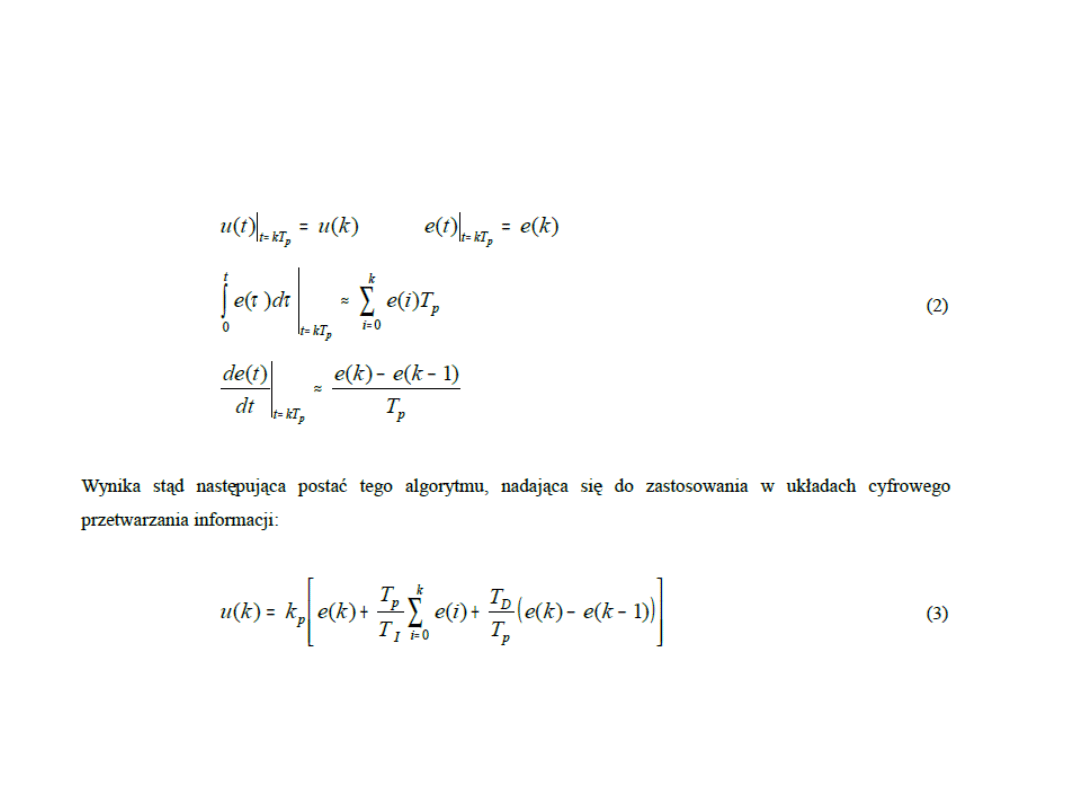
Algorytm różnicowy regulatora

PRZEKSZTAŁCENIE RÓWNANIA RÓŻNICOWEGO DO
POSTACI TRANSFORMATY Z
Podobnie jak w przypadku transformaty Laplace'a,
wprowadzenie transformaty Z ma na celu umożliwienie
wykonywania matematycznych operacji algebraicznych co
może być wykonywane w dziedzinie zmiennej zespolonej z,
ostateczna odpowiedź czasowa wyznaczana jest przez
zastosowanie odwrotnej transformaty Z. Odwrotna
transformata Z funkcji Y(z) daje informacje tylko o y(kT), a
nie o y(t). Innymi słowy transformata Z zachowuje
informacje tylko w chwilach próbkowania
.

Przekształcenie równań
różnicowych
Sygnały występujące w dyskretnych chwilach czasu
opisywane są przez równania różnicowe. Na tym wykładzie
pokazane zostanie w jaki sposób dokonuje się zastąpienia
równania różnicowego odpowiadającą mu transformatą Z.
W tabeli poniżej znajdują się podstawowe twierdzenia w
oparciu o które dokonuje się przekształcenia równania
różnicowego do postaci transformaty Z. Na podstawie
równania różnicowego w sposób sekwencyjny można
dokonać wyznaczenia dyskretnego sygnału czasowego.
Takie same wartości próbek sygnału dyskretnego można
uzyskać rozwiązując równanie różnicowe metodą
transformaty Z.
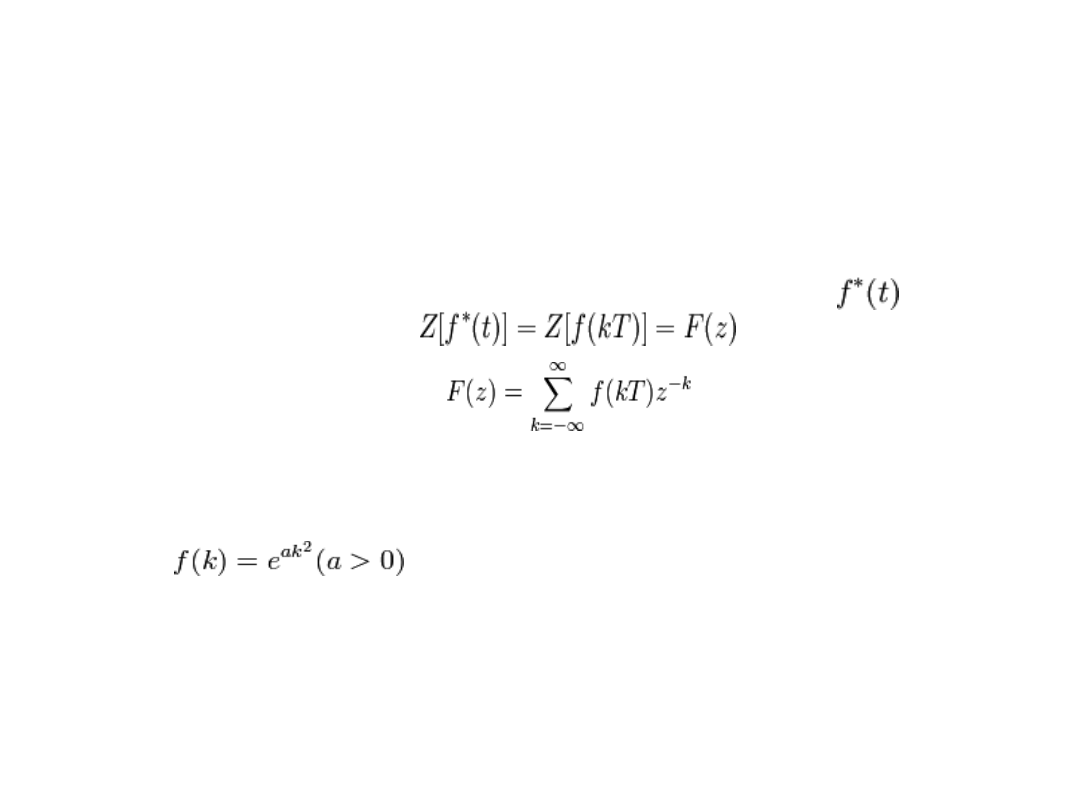
Transformata Z
Transformata Z (transformata Laurenta) jest
odpowiednikiem
stosowanym do
opisu i analizy układów dyskretnych.
Transformatą Z dyskretnej (impulsowej) funkcji czasu
jest nazywana funkcja
określona wzorem
gdzie: F(z) – transformata oryginału; f(kT) – oryginał
dyskretny; Transformaty Z istnieją dla funkcji dyskretnych,
które nie rosną szybciej niż
.
Przykładowo, dla funkcji f(k) = k! lub
nie istnieją transformaty Z, ponieważ nie spełniają one
powyższego warunku
.
Właściwości transformaty Z
• Liniowość:
• Z[af1(kT) + bf2(kT)] = aF1(z) + bF2(z)
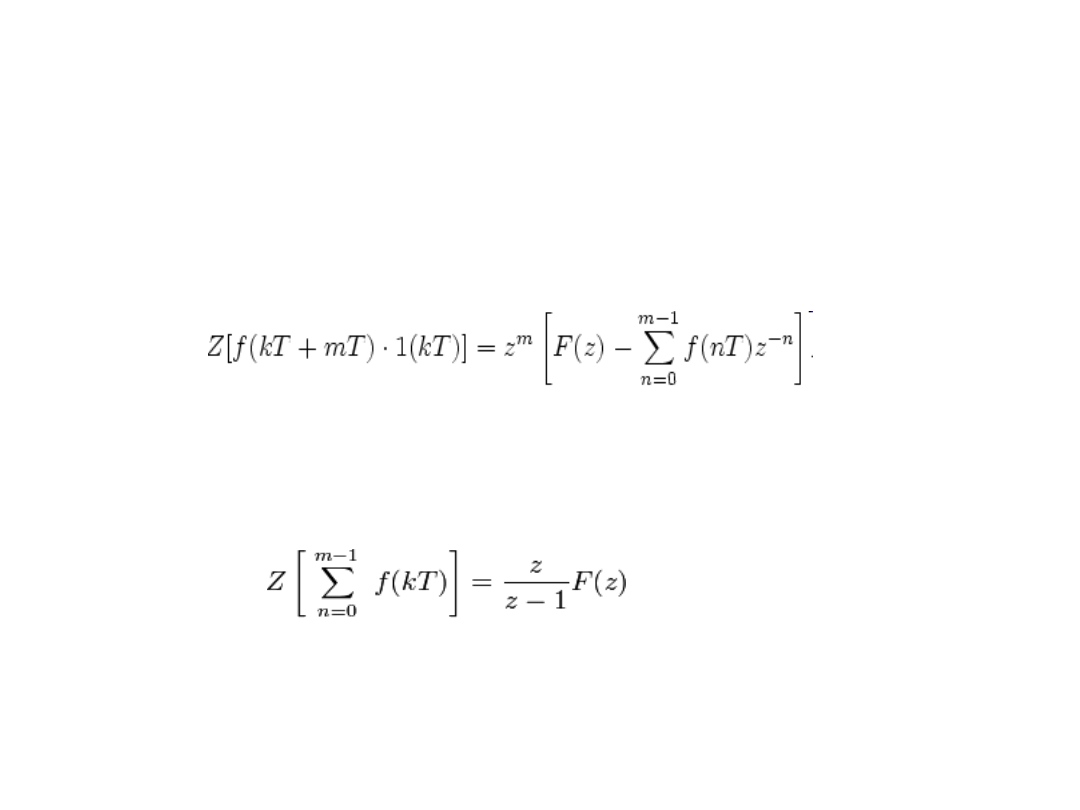
• Przesunięcie w dziedzinie czasu:
• gdzie m – dowolna dodatnia
; 1(kT) –
.
• Transformata sumy:
• Transformata różnicy
• Z[f((k + 1)T) − f(kT)] = (z − 1)F(z) − zf(0)
Właściwości transformaty Z
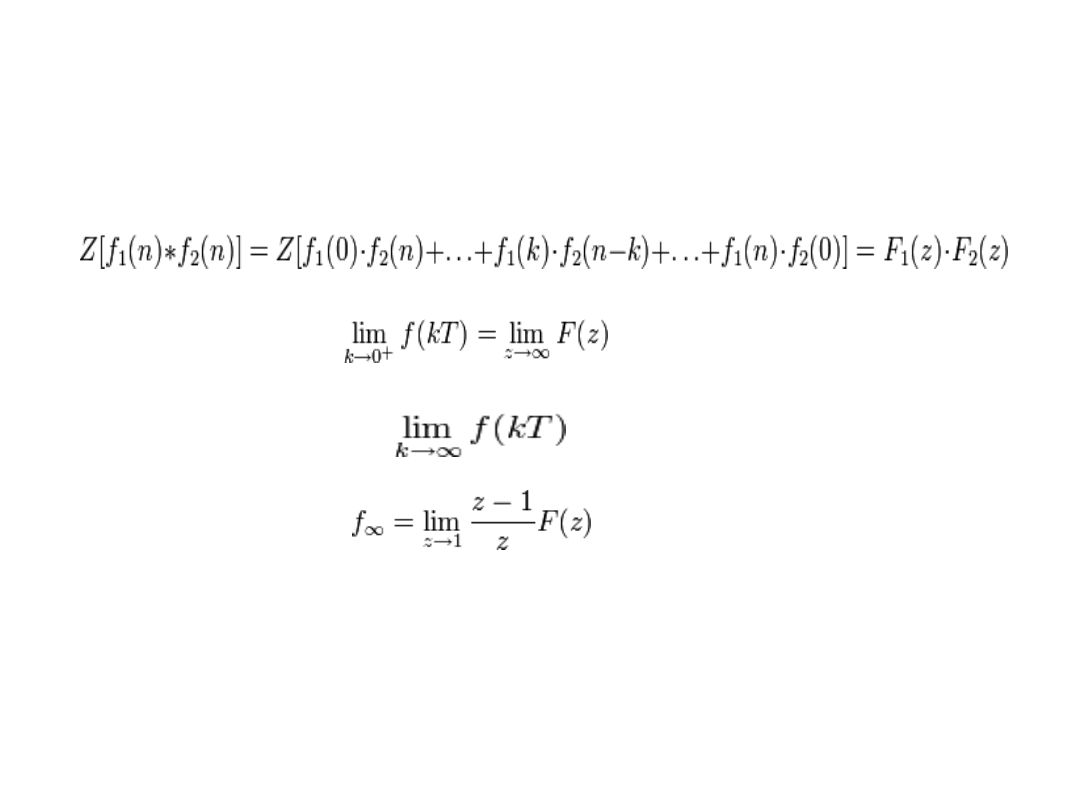
• Splot
• Twierdzenie o wartości początkowej:
• Jeśli istnieje granica,
, to ma ona wartość
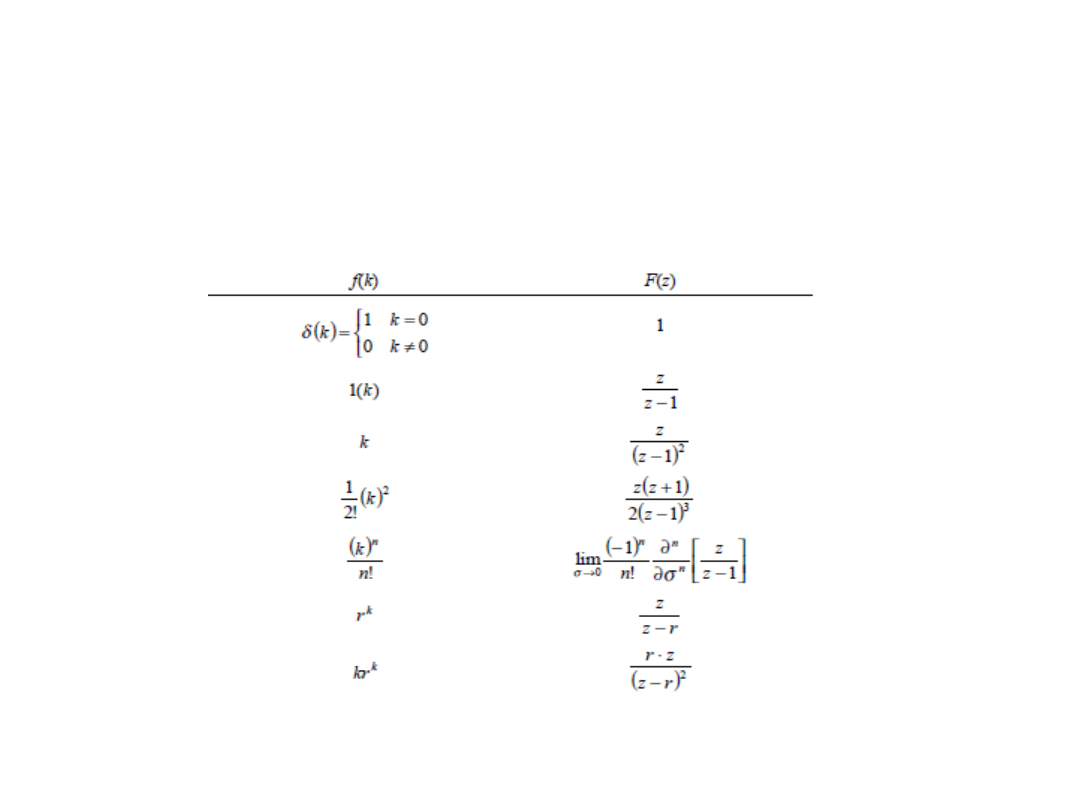
Wybrane transformaty Z
Transformaty Z funkcji podstawowych
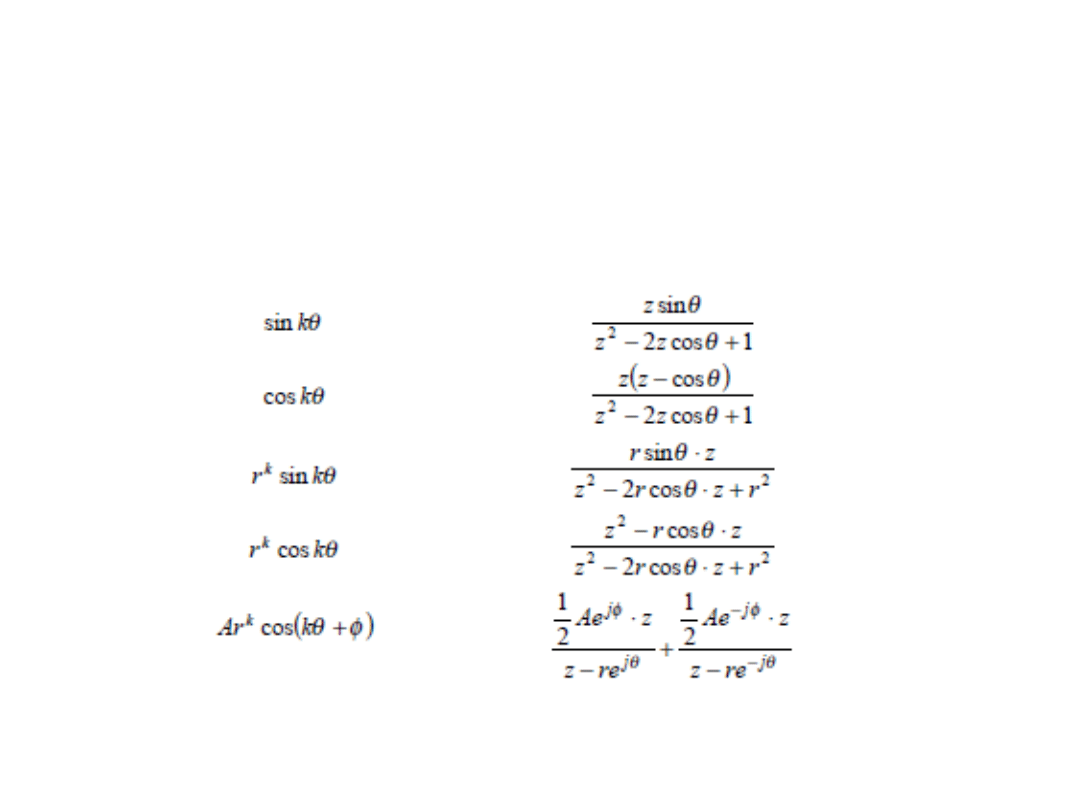
Wybrane transformaty Z
Transformaty Z funkcji okresowych
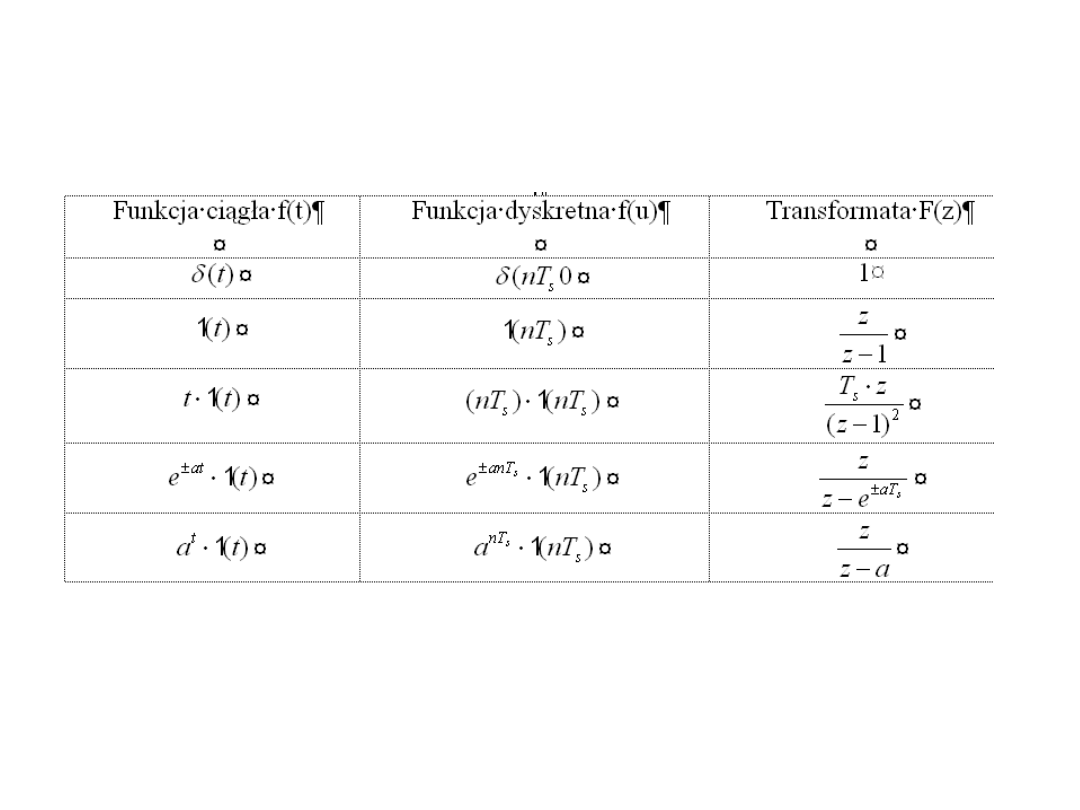
Porównanie funkcji
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
Wyszukiwarka
Podobne podstrony:
LAB12 Regulator cyfrowy
SyntezaRegulatoraCyfrowego-ModelWeWyObiektu., Synteza regulatora cyfrowego - model we/wy obiektu
Wykład 10 Regulatory cyfrowe (2013)
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
regulator cyfrowy sprawozdanie, Elektrotechnika AGH, Semestr IV letni 2013-2014, Teoria Sterowania i
Badanie dynamiki układu ciągłego z regulatorem cyfrowym
Regulator cyfrowy w układzie z obiektem ciągłym
regulatory cyfrowe, Automatyka, dokumenty i
regulator cyfrowy Dzixon
Badanie Dynamiki Ukł Z Regulatorem Cyfrowym
wykład 13 Regulatory cyfrowe (2013)
wykład 12 Regulatory cyfrowe (2013)
205 zastosowanie jezyka wyrazen regularnych do syntezy automatow, Politechnika Wrocławska - Materiał
Cyfrowy regulator PID
wieczny akumulator na superkondensatorach z regulacją napięcia na przetworniczce DC DC oraz opcjonal
Cyfrowy regulator prądu diody LED do zastosowań oświetleniowych
NOTAKI Z TECHNIKI CYFROWEJ
więcej podobnych podstron