|
AKADEMIA GÓRNICZO-HUTNICZA im. Stanisława Staszica w Krakowie |
Imię i Nazwisko :
Grzegorz Niedojadło |
|||
KATEDRA AUTOMATYKI NAPĘDU I URZĄDZEŃ PRZEMYSŁOWYCH |
|||||
Rok akademicki: 1998/99 |
Rok studiów: 2 |
Semestr: 4 |
|||
Kierunek: ELEKTROTECHNIKA |
Grupa: 6.2 |
||||
Temat: Regulator cyfrowy w układzie z obiektem ciągłym. |
Nr ćwiczenia: 4 |
||||
Data wykonania: 08 - 05 - 99 |
Data zaliczenia:
|
Ocena: |
|||

Dynamikę zamkniętego układu z ujemnym sprzężeniem zwrotnym z obiektem ciągłym oraz z regulatorem cyfrowym badamy na podstawie układu :
Obiekt ciągły o transmitancji
ma charakter całkująco-inercyjny. Holder, zwany również ekstrapolatorem `0' o transmitancji
ma charakter całkujący. Człon
pełni funkcję opóźnienia - Ti = 1.
Aby wyznaczyc transmitancję regulatora cyfrowego łączymy szeregowego transmitancję obiektu ciągłego G(s) z transmitancją ekstrapolatora `0' H(s), otrzymując nową transmitancje zastępczą GZ(s).
Sprowadzamy transmitancję GZ(s) do postaci czasowej:
Oryginał transmitancji operatorowej:
Korzystając z przekształcenia „z” otrzymujemy transmitancję Go(z):
Po przekształceniach otrzymujemy:
Po połączeniu transmitancji obiektu ciągłego G(s) i ekstrapolatora `0' H(s), oraz ich przetransponowaniu za pomocą przekształcenia „z” do postaci dyskretnej G0(z) badany układ wygląda następująco:

Na podstawie schematu stosując reguły upraszczania schematów blokowych, otrzymujemy transmitancję zastępczą układu:
Zakładając
i
Transmitancja zastępcza układu:
Transmitancja układu musi spełniać warunki:
1) skończony czas regulacji (gdy mianownik osiągnie zk, gdzie k jest rzędem obiektu - gdy k = 2 mianownik przyjmie postać z2). Wówczas transmitancja zastępcza:
2) zerowy uchyb regulacji.
Transmitancja uchybowa:
Podstawiając GZ(z) z pierwszego warunku otrzymujemy K,
oraz
.
Parametry te wynoszą:
a1 = 1
a0 = 0,4585
K = 2,5411
Transmitancja zastępcza badanego układu:
Wykorzystując transmitancję zastępczą układu oraz schemat przedstawiający obiekt w formie dyskretnej wyznaczamy transmitancję regulatora:
Po wstawieniu GZ(z) i G0(z):
Znana transmitancja regulatora oraz obiektu umożliwia przeprowadzenie symulacji układu przy pomocy modułu Matlaba - Simulinka na podstawie schematu blokowego:
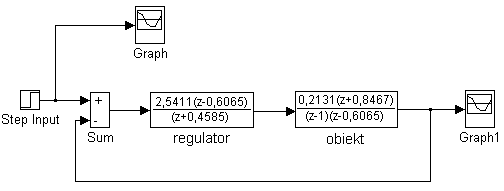
Podając skok jednostkowy jako wymuszenie na grafach obserwowujemy ch-ki wejściową oraz wyjściową:
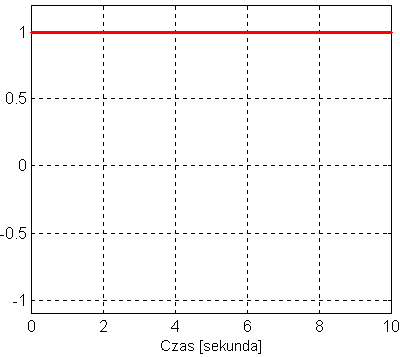
Charakterystyka wejściowa układu zamkniętego z obiektem ciągłym i regulatorem cyfrowym:
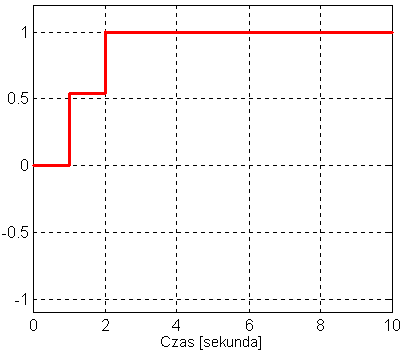
Charakterystyka wyjściowa układu zamkniętego z obiektem ciągłym i regulatorem cyfrowym:
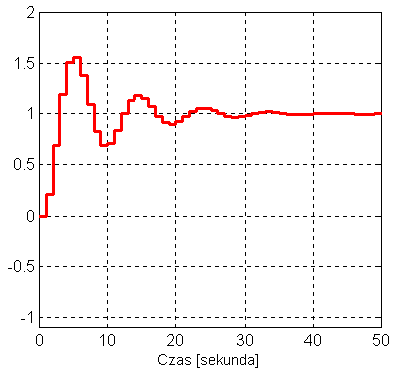
Charakterystyka wyjściowa układu bez regulatora:
Wnioski:
Z charakterystyk wynika, że w odpowiedzi na wymuszenie skokiem jednostkowym regulator powoduje szybkie ustalenie przebiegu wyjściowego - zmniejsza stałą czasową.
Przebieg ustalony występuje już po dwóch sekundach, nie ma przeregulowań podczas ustalania.
Dla porównania z charakterystyki układu bez regulatora widać, ze układ ustala się dopiero po 50 sekundach oraz występują przeregulowania.
Regulatory zapewniają zatem szybkie ustalenie układu i mogą znaleźć zastosowanie tam, gdzie jest to wymagane
5
1
Wyszukiwarka
Podobne podstrony:
SyntezaRegulatoraCyfrowego-ModelWeWyObiektu., Synteza regulatora cyfrowego - model we/wy obiektu
pais modelowanie obiektów ciągłych i dyskretnych układów regulacji
LAB12 Regulator cyfrowy
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
regulacja wieloparametrowa, reg.w., OBIEKT REGULACJI
Wykład 10 Regulatory cyfrowe (2013)
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
regulator cyfrowy sprawozdanie, Elektrotechnika AGH, Semestr IV letni 2013-2014, Teoria Sterowania i
Badanie dynamiki układu ciągłego z regulatorem cyfrowym
Modelowanie obiektów ciągłych w dziedzinie czasu, Automatyka
Regulacja cyfrowa
Fotografia cyfrowa swiat w obiektywie Wydanie II fotobi
regulatory cyfrowe, Automatyka, dokumenty i
regulator cyfrowy Dzixon
Fotografia cyfrowa swiat w obiektywie Wydanie II
Badanie Dynamiki Ukł Z Regulatorem Cyfrowym
Badanie regulatora PID w układzie sterowania prędkością obrotową silnika prądu stałego
wykład 13 Regulatory cyfrowe (2013)
więcej podobnych podstron