OBIEKT REGULACJI
Obiektem regulacji jest model zbiornika przedstawiony poniżej.
Celem regulacji jest stabilizacja dwóch wielkości charakteryzujących stan wody
w zbiorniku: poziomu wody oraz temperatury wody.
Sterowanie obiektem realizowane jest za pomocą elementów dwustanowych. Zmiany poziomu wody, czyli napełnianie i opróżnianie uzyskuje się przez pompowanie ze stałą wydajnością. Nagrzewanie wody uzyskiwane jest za pomocą grzałki elektrycznej
stałej mocy, a chłodzenie przez jednoczesne napełnianie wodą zimną i opróżnianie
z jednakowymi wydajnościami. Zakłócenia, czyli zmiany stanu regulowanych wielkości nie wynikające z procesu regulacji mogą być symulowane.
P
Napełnianie Opróżnianie
q
q
ϑ
Zbiornik Obiekt regulacji
rezerwowy
WPROWADZENIE
Regulacja wieloparametrowa to proces regulacji, w którym regulowanych jest kilka wielkości występujących w jednym obiekcie.
Może przy tym zachodzić związek pomiędzy tymi wielkościami, tzn. sterowanie jedną
z nich wpływa również w sposób niekontrolowany na stan pozostałych.
W ćwiczeniu obiektem regulacji jest zbiornik wody, a regulowanymi parametrami są: poziom wody i temperatura. Wyznaczane są charakterystyki obiektu regulacji dla poszczególnych torów, badany jest proces niezależnej regulacji obu parametrów po wystąpieniu zakłóceń, obserwowany wzajemny wpływ obu torów przy regulacji jednoczesnej.
DOBÓR NASTAW REGULATORA
Metoda Zinglera-Nicholsa
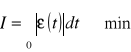
Znając odpowiedz skokową układu określamy czas opóźnienia t0 i nachylenie a.
Operując nachyleniem i czasem opóźnienia możemy dobrać parametry regulatorów.
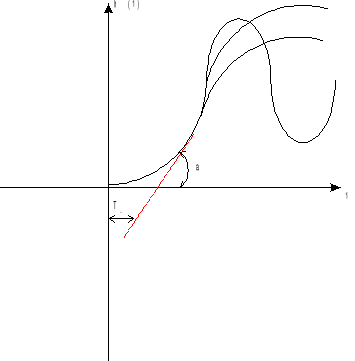
a=34 to= 20
|
k |
ti |
td |
|
1/ato |
- |
- |
PI |
0,9/ ato |
3,3to |
- |
PID |
1,2/ ato |
2 to |
0,5 to |
Metoda modelu
Nie wymaga znajomości skokowej odpowiedzi układu.
Wyłączamy nastawy ti , td ,regulujemy kp tak aby w układzie pojawiły się oscylacje.
Odczytujemy wzmocnienie regulatora P oraz mierzymy okres oscylacji Tosc. Znając te dwie wielkości wyznaczamy nastawy regulatora .
PID: kp=0,6 kosc Ti=0,5 Tosc Td=0,12 Tosc
WNIOSKI
W przypadku regulacji poziomu zarówno do napełniania jak i opróżniania zastosowane było pompowanie wody z wydajnością nominalnie jednakową co do wartości, a przeciwną co do znaku dla napełniania i opróżniania.
Zmiana poziomu wody w czasie jest równa: dH/dt = q/P , gdzie q jest objętościową wydajnością pompki, natomiast P jest powierzchnią zbiornika.
Równanie to opisuje układ całkujący o stałej całkowania równej Kc=1/P.
Regulacja temperatury przebiega inaczej w przypadku nagrzewania niż w przypadku chłodzenia.
Przy nagrzewaniu wielkością wejściową jest moc grzałki. W tym przypadku moc ta może zmieniać się skokowo. Przy nagrzewaniu zbiornik zachowuje się jak obiekt inercyjny pierwszego rzędu o pewnej stałej czasowej.
Przy chłodzeniu zbiornik również zachowuje się jak obiekt inercyjny pierwszego rzędu, lecz o innej stałej czasowej niż w przypadku nagrzewania, a wielkością wejściową jest temperatura wody dolewanej.
W badanym układzie regulacji elementy wykonawcze oraz przetworniki pomiarowe są elementami istniejącymi fizycznie, natomiast regulator PID oraz komparatory realizowane są na drodze programowej. Sygnały sterujące do elementów wykonawczych oraz wartości aktualnie regulowanych wielkości przekazywane są do mikrokomputera za pośrednictwem układu interfejsu.
Bardzo ważny w układach regulacji automatycznej jest dobór parametrów regulatorów ( w naszym przypadku regulatora PID ), czego obrazem są wykresy regulacji przeprowadzanej w ćwiczeniu.
Widać, że regulacja ma charakter oscylujący wokół zadanych przez nas wartości do utrzymania, czyli nie są one utrzymywane idealnie.
Tak więc potwierdza się jak ważną rolę odgrywa umiejętne określenie wartości nastaw regulatorów wykorzystywanych w automatycznej regulacji.
Podczas przeprowadzania ćwiczenia nastawy regulatora zostały dobrane mało trafnie .
Doboru nastaw powinniśmy dokonać np. metodą Zinglera - Nicolsa wtedy:
Ti= 40 Td= 10 kp= ![]()
![]()
Występujące w przebiegu regulacji uchyby wynikają z nieprawidłowego funkcjonowania układu lub ingerencji zewnętrznej.
Wyszukiwarka
Podobne podstrony:
SyntezaRegulatoraCyfrowego-ModelWeWyObiektu., Synteza regulatora cyfrowego - model we/wy obiektu
Badanie UAR obiektu oscylacyjnego z regulatorem PD v6, 1. Cel ˙wiczenia:
ASEUT 2015 2016 MGR S1 PODSTAWOWE OBIEKTY REGULACJI W INSTALACJACH HYDRAULICZNYCH UCZ W1
Obiekty Regulacji
Regulacja wieloparametrowa, Automatyka
pais modelowanie obiektów ciągłych i dyskretnych układów regulacji
Regulator cyfrowy w układzie z obiektem ciągłym
Sprawko UAR, Elektrotechnika AGH, Semestr IV letni 2013-2014, Teoria Sterowania i Technika Regulacji
regulacja wieloparametrowa, RegWieloparam, Politechnika Śląska
11 Regulacja obiektów statycznych
06 Typowe obiekty i regulatory
Genetyka regulacja funkcji genow
REGULACJA UKLADU KRAZENIA 2
33 Przebieg i regulacja procesu translacji
więcej podobnych podstron