Plan wykładu
1. Wymagania do aparatury pomiarowej
2. Ograniczenia występujące podczas
pomiarów wielkości elektrycznych.
3. Klasyfikacja przyrządów pomiarowych
według ich funkcji i właściwości.
4. Przykładowy schemat strukturalny
multimetru elektronicznego
cyfrowego (DMM - ang. Digital Multi-
Meter).

1. Wymagania do aparatury
pomiarowej
Podstawowymi wymaganiami są:
•Możliwość pomiaru wartości wielkości w zadanym
zakresie
(tak małych jak i dużych wartości), jest
to wymagania amplitudowe;
•Możliwość pomiarów wielokanałowych – kilka
wielkości
jednego lub różnego rodzaju
•Brak obciążenia obiektu badanego
–
odpowiednia wartość rezystancji wejściowej
•Zadana dokładność pomiarów
, zapewnia się
odpowiednią klasą dokładności woltomierza oraz
innymi wartościami jego parametrów: stabilnością
temperaturową oraz czasową, odpornością na inne
wielkości wpływające
1. Wymagania do aparatury
pomiarowej
•Odporność na oddziaływania zakłóceń
tak
regularnych jak i losowych wpływu zakłóceń to
wymaganie jest ważne przy pomiarach wielkości
niskiego poziomu, w warunkach przemysłowych
•Szybkość pomiaru
– to wymaganie jest ważne
przy pomiarach wielkości szybko zmiennych
(dynamicznych),.
•Możliwość współpracy z PC
– jest to ważne przy
automatyzacji pomiarów
•Możliwość opracowania wyników
wg zadanego
algorytmu
•Łatwość obsługi
•Niska cena oraz niski koszty pomiarów
2. Ograniczenia występujące podczas
pomiarów wielkości elektrycznych
.
Fundamentalnym czynnikiem ograniczającym jest szum
cieplny lub szum Jonson’a.
Na dowolnej rezystancji
R
energia cieplna powoduje ruch
nośników ładunków elektrycznych, który z kolei
powodują szum elektryczny.
Moc tego szumu opisuje się wzorem
P=4kTB
,
gdzie:
k=1.38·10
-23
J/K-
stała Boltsmana;
T
–temperatura (K);
B
– pasmo częstotliwościowe szumu (Hz).
Wartość skuteczna szumu Jonsona
U
sz
na rezystancji (
R
)
równa się:
a wartość prądu szumu Jonsona
I
sz
:
kBTR
PR
U
sz
4
R
kBT
R
P
I
sz
4
2. Ograniczenia występujące podczas
pomiarów wielkości elektrycznych
.
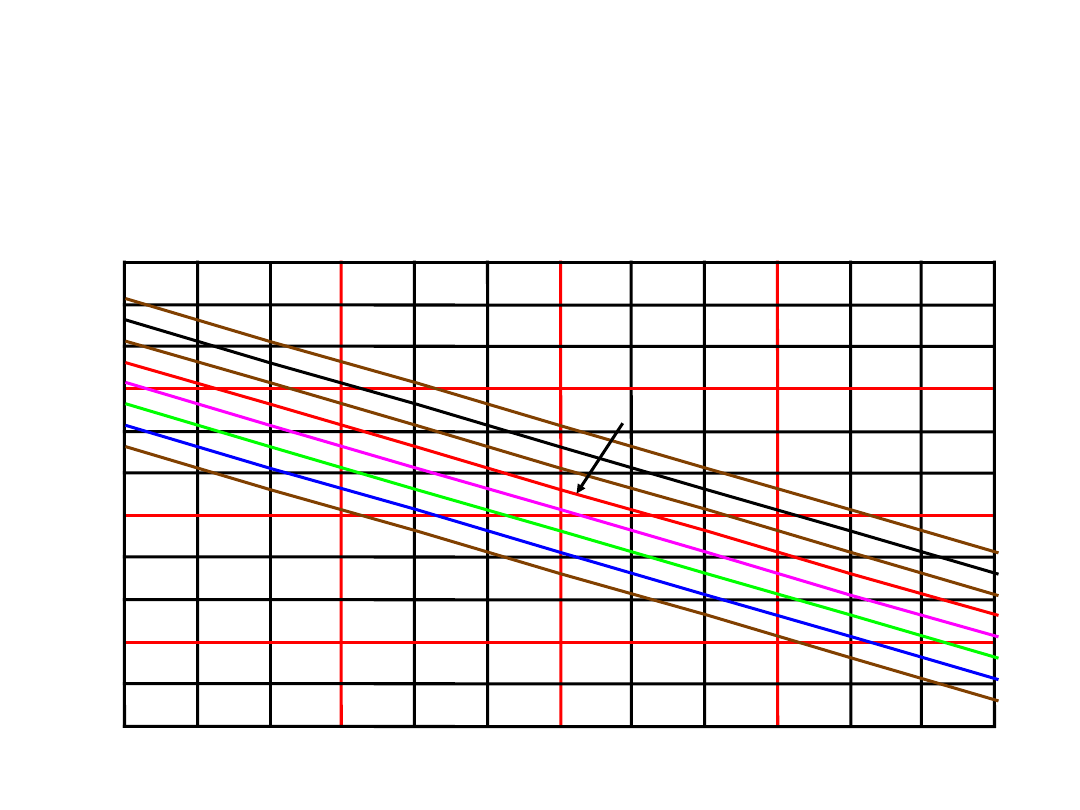
Zależności wartości napięcia oraz prądu szumu cieplnego
przy
T=295 K
(
22
o
C
) jako funkcje rezystancji oraz
szerokości pasma pokazane niżej
1
Ω
1 k
Ω
0.01
0.1
10
100
10
100
B=0,1 Hz
B=1 MHz
1 µV
B=1 kHz
1 mV
1 V
1 nV
0.01
0.1
1 M
Ω
1 G
Ω
2. Ograniczenia występujące podczas
pomiarów wielkości elektrycznych
.
Teoretyczna granica czułości pomiaru napięcia
Rezystan
cja
Pasmo częstotliwości
0,1 Hz
1 Hz
1 kHz
1 MHz
1
Ω
0,03 nV
0,1 nV
3 nV
0,1 µV
1 k
Ω
1 nV
3 nV
0,1 µV
3 µV
1 M
Ω
30 nV
0,1 µV
3 µV
100 µV
1 G
Ω
1 µV
3 µV
100 µV
3 mV
1 T
Ω
30 µV
100 µV
3 mV
100 mV
2. Ograniczenia występujące podczas
pomiarów wielkości elektrycznych
.
Zależności wartości skutecznej prądu szumu cieplnego
przy T=295 K (22
o
C) jako funkcje rezystancji oraz
szerokości pasma
1
Ω
1 k
Ω
0.01
0.1
10
100
10
100
0,1 Hz
1 MHz
1 kHz
1 pA
1 nA
1 µA
1 fA
0.01
0.1
1 M
Ω
1 G
Ω
T
Ω
2. Wymagania do woltomierzy DC.
Zakresy
Teoretyczna granica czułości pomiaru prądu
Rezystan
cja
Pasmo częstotliwości
0,1 Hz
1 Hz
1 kHz
1 MHz
1 Ohm
30 pA
100 pA
3 nA
100 nA
1 kOhm
1 pA
3 pA
100 pA
3 nA
1 MOhm
0,03 pA
0,1 pA
3 pA
100 pA
1 GOhm
1 fA
3 fA
0,1 pA
3 pA
1 TOhm
0,03 fA
0,1 fA
3 fA
0,1 pA

3. Klasyfikacja przyrządów
pomiarowych według ich funkcji i
właściwości
W zależności od zakresów i warunków pomiaru (właściwości
obiektu – rezystancja, pasmo częstotliwości) rozróżnia się:
•
multimetry;
• elektrometry,
• nanowoltomierzy,
• pikoamperomierzy,
• mikro-omomierzy,
• przyrządy źródła – mierniki,
• oraz inne.

3. Klasyfikacja przyrządów
pomiarowych według ich funkcji i
właściwości
Multimetry
są to przyrządy dla pomiarów:
-
napięć powyżej 1 mkV ;
- prądów powyżej 1 mkA, oraz
- rezystancji poniżej 1 GOhm
.
Rezystancja wejściowa woltomierza (Rv) DMM stanowi od
około (
1-10-100
) MOhm do maksymalnie (1-10) GOhm
Rozdzielczość DMM wynosi od
3½
cyfr dziesiątkowych
(bardzo tanie) aż do drogich
6½-7½
cyfr
dziesiątkowych.
Maksymalna czułość DMM stanowi do (
0,1-0,01
) mkV (do
10 nV
).

3. Klasyfikacja przyrządów
pomiarowych według ich funkcji i
właściwości
Elektrometry.
Są to przyrządy pomiarowe dla pomiarów napięć, prądów,
ładunku i rezystancji przy następnych warunkach:
–
prądów
poniżej
1 µA do 100 pA
, napięcie źródła przy
pomiarach
prądu
jest
poniżej kilku set
mV
;
–
napięcia
poniżej
1 µV
, źródło napięcia ma rezystancją
wyjściową rzędu
1 MΩ
i wyżej do
10 TΩ
;
–
rezystancji
powyżej
1 GΩ
;
–
pomiar
ładunku
;
–
pomiary przy
porównywalnych wartościach szumów
cieplnych
oraz innych.
Rezystancja wejściowa
woltomierza elektrometru stanowi
typowo od około
100 T
Ω
nawet do około
100 P
Ω
.

3. Klasyfikacja przyrządów
pomiarowych według ich funkcji i
właściwości
Pikoamperomierze.
Są to bardzo czułe, pracujący w
pobliżu teoretycznej
granicy czułości
oraz przy
mniejszych wartościach
spadku napięcia
(tzw. votage burden) w porównaniu
do elektrometrów.
Pikoamperomierze zapewniają też inne właściwości,
np. lepszą szybkość pomiaru lub możliwość
logarytmicznej charakterystyki.

3. Klasyfikacja przyrządów
pomiarowych według ich funkcji i
właściwości
Mikro-omomierzy.
Mikro-omomierz jest to specjalny omomierz przeznaczony
do pomiaru
bardzo niskich wartości rezystancji
.
Typowy mikro-omomierz ma czułość do około
10 µΩ
.
Pomiar małych rezystancji odbywa się
przez 4-przewodowe
podłączenie
obiektu badanego (w celu eliminacji wpływu
rezystancji przewodów) oraz charakteryzują się
dodatkowymi (w porównaniu do DMM) funkcjami.
Z pośród nich jest to możliwość kompensacji napięcia
przesunięcia (offset), spowodowanego przykładowo
termoelektryczną SEM, możliwość ograniczenia napięcia
wzdłuż badanej rezystancji do
bardzo niskiego poziomu
(typowo poniżej 20 mV)
, co jest bardzo ważne przy
testowaniu takich elementów jak kontakty
przełączników, kluczy oraz (rele) kontaktronów.

3. Klasyfikacja przyrządów
pomiarowych według ich funkcji i
właściwości
Przyrządy źródła – mierniki
Sourse-Measure Unit - SMU
są to przyrządy, funkcjami których są:
-
pomiar napięcia;
- pomiar prądu;
- źródło napięcia;
- źródło prądu.
SMU pozwalają na jednoczesne dokładne (o zadanej
wartości):
-
wymuszanie obiektu napięciowe i pomiar prądu
odpowiedzi oraz
- wymuszanie obiektu prądowe i pomiar napięcia
odpowiedzi.
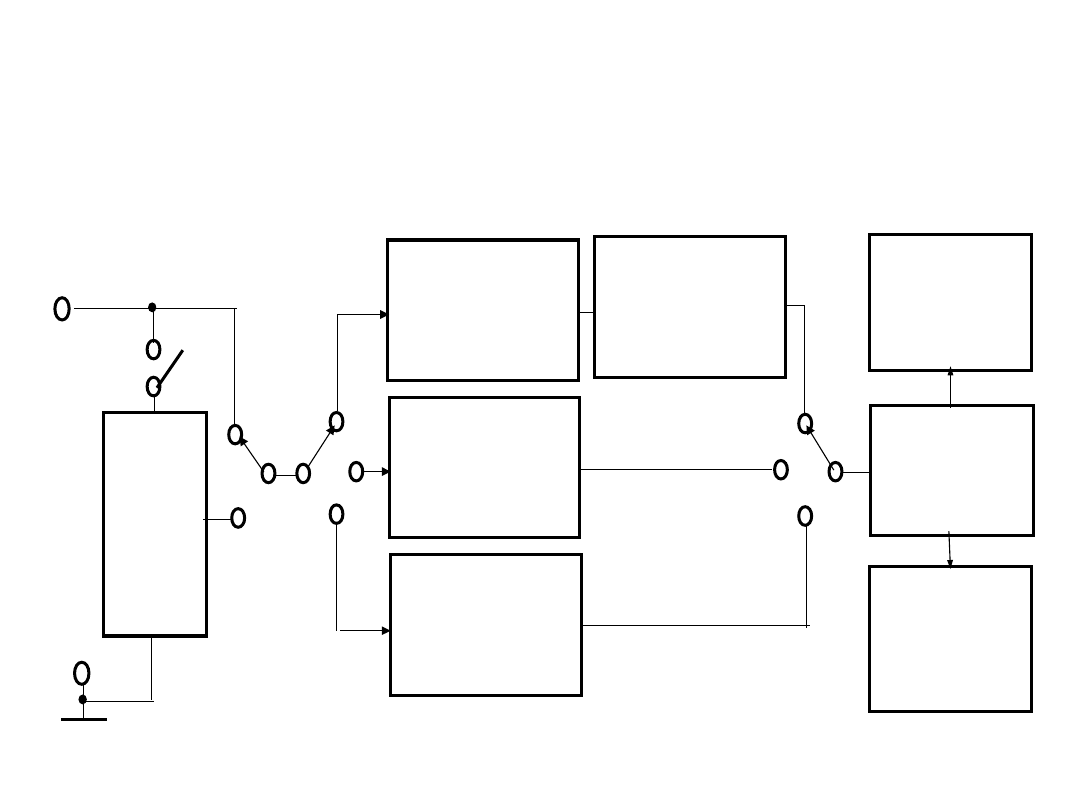
4. Przykładowy schemat strukturalny
multimetru elektronicznego cyfrowego
(DMM - ang. Digital Multi-Meter)
AC
Wzmacniacz/
dzielnik
AC
przetwornik
DC
Wzmacniacz/
dzielnik
Ohms
przetwornik
AC
DC
Ohms
I
U
p
rz
e
tw
o
rn
ik
HI
LO
W
e
jś
c
ie
AC
DC
Ohms
V
A
A
A/C
przetwornik
(+procesor
)
Odczyt
Cyfrowy
(display)
Wyjście
Cyfrowe
(RS 232,
GPIB,
USB)

Problemy pomiaru
małych napięć w
obwodach
elektronicznych

Plan wykładu
1. Wymagania do woltomierzy DC.
2.Korekcja wpływu rezystancji
wejściowej woltomierza
3. Układy wejściowe woltomierza.
4. Układ wejściowy woltomierza ze
wzmacniaczem instrumentalnym.

1. Wymagania do woltomierzy
DC.
Ogólnymi wymaganiami do woltomierze przy pomiarach wartości
napięcia DC są
:
1.
Możliwość pomiaru wartości napięcia w zadanym
zakresie
(małych jak i dużych wartości napięcia),
jest to wymagania amplitudowe;
2.
Brak obciążenia obiektu badanego
– odpowiednia
wartość rezystancji wejściowej;

1. Wymagania do woltomierzy
DC.
Ogólnymi wymaganiami do woltomierze przy pomiarach wartości
napięcia DC są
:
3.
Zadana dokładność pomiaru
, zapewnia się odpowiednią
klasą dokładności woltomierza oraz innymi wartościami jego
parametrów: stabilnością temperaturową oraz czasową,
odpornością na inne wielkości wpływające min. Zakłócenia;
4.
Szybkość pomiaru
– ten problem jest ważny przy
pomiarach wielkości szybko zmiennych (dynamicznych),
jest związany z odpornością do wpływu zakłóceń;
5.
Możliwość przesyłania danych pomiarowych do PC
–
jest to ważne przy automatyzacji pomiarów oraz
opracowania wyników.
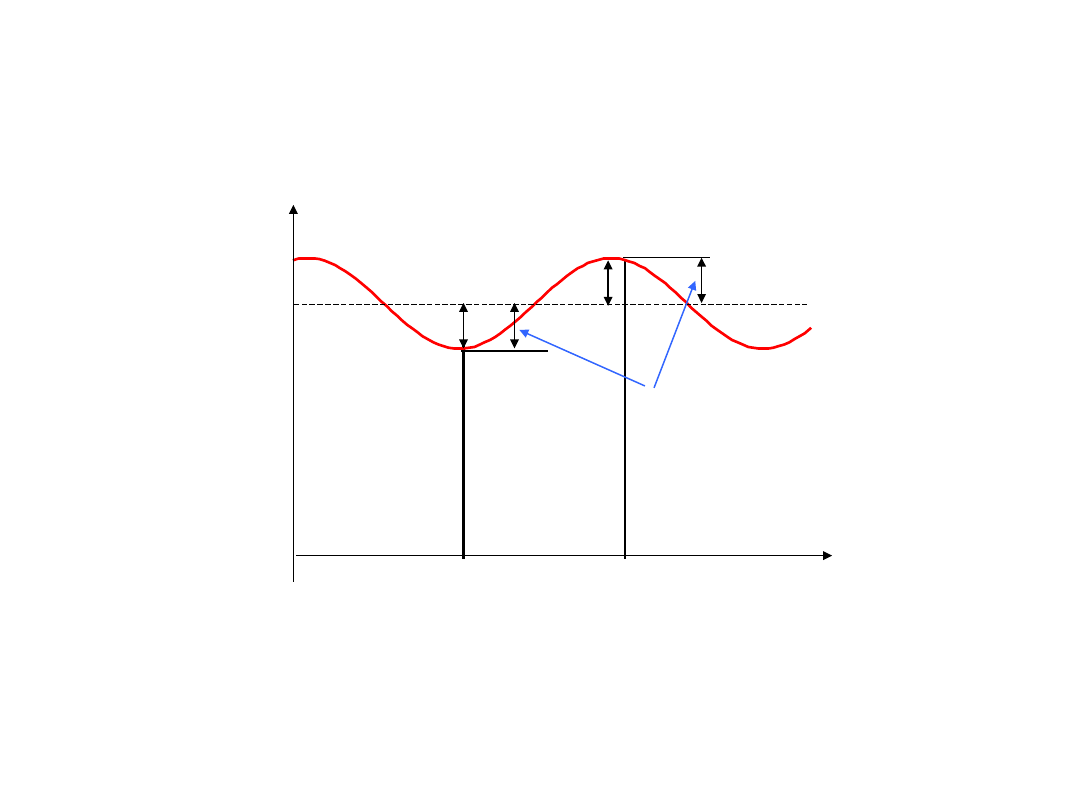
Wpływ zakłócenia
-U
m
ΔU
x.max
=U
m
U
x
Zakłócenie
ΔU
x2
ΔU
x1
Czas
Maksymalne błędy
pomiaru napięcia DC
(U
x
)
U
m
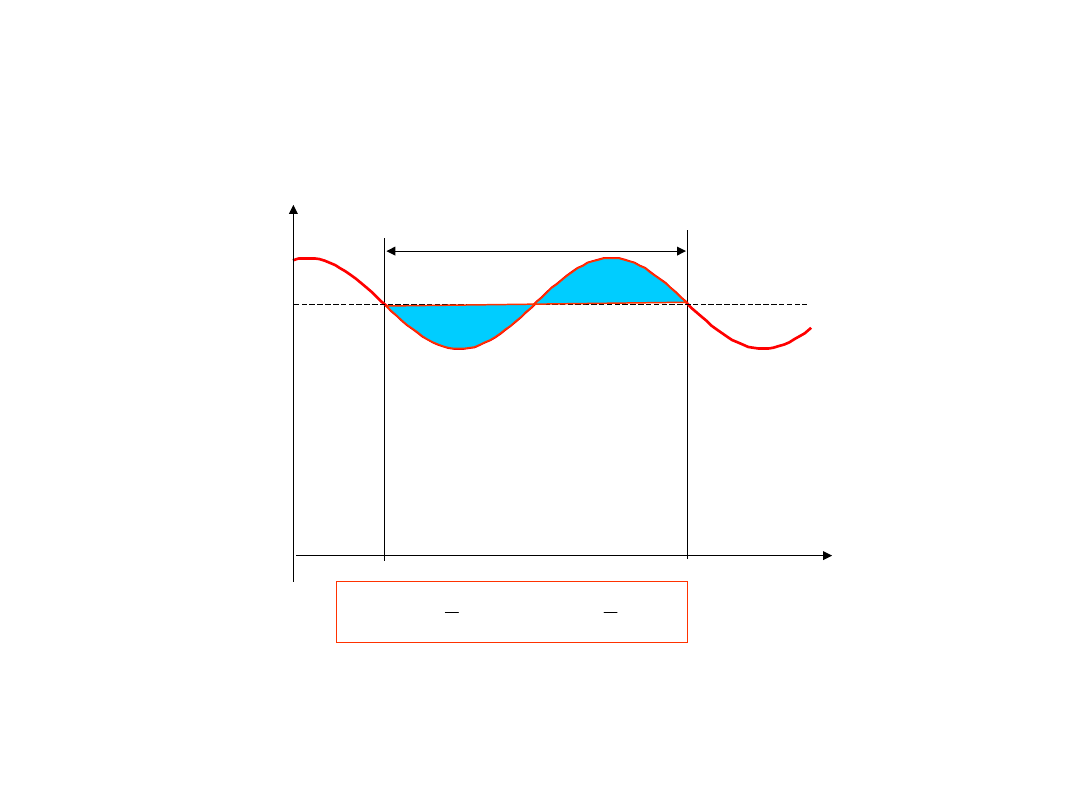
Wartość średnia zakłócenia w czasi
okresu
U
x
Zakłócenie
Czas
Wartość średnia od zakłócenia
harmonicznego w czasie jego
okresu T równa się zeru!
+S
Uz
-S
Uz
-S
Uz
+S
Uz
=0
T
!
!
!
0
2
sin
2
cos
1
1
1
1
dt
T
t
U
dt
T
t
U
T
t
t
m
T
t
t
m
t
1
+T
t
1
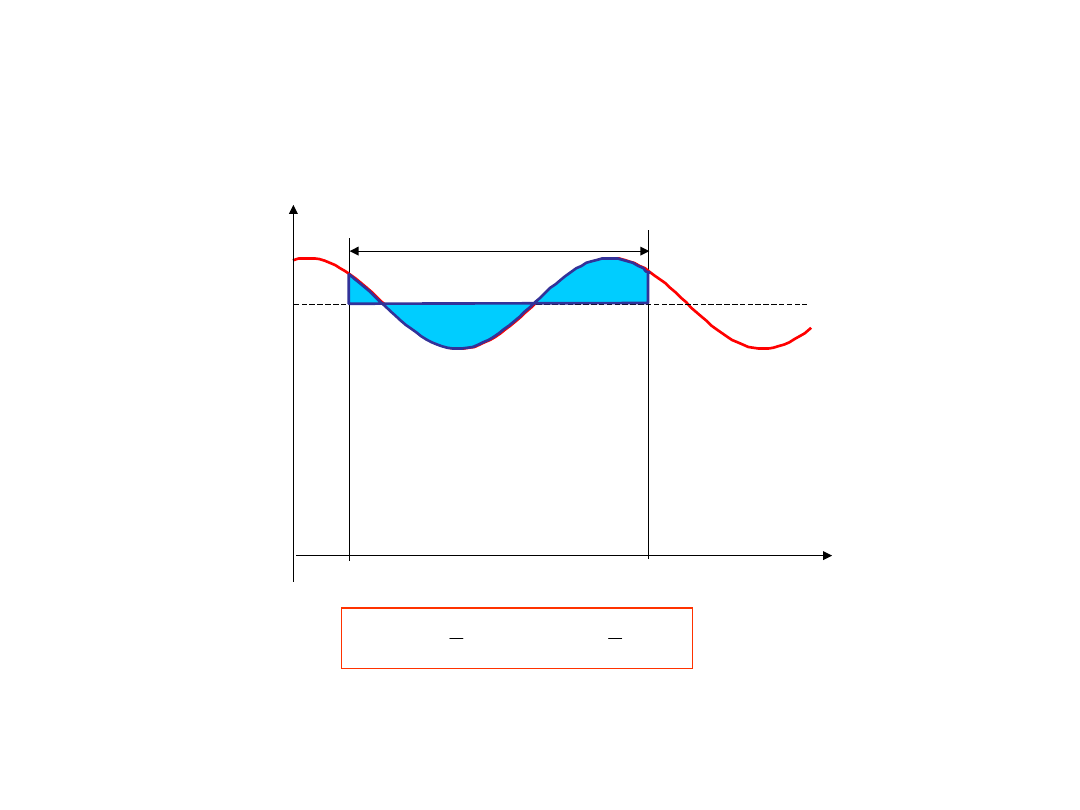
Wartość średnia zakłócenia w czasi
okresu
t
1
+T
U
x
Zakłócenie
Czas
Wartość średnia od zakłócenia
harmonicznego w czasie jego okresu T
równa się zeru niezależnie od początku
całkowania!
+S
Uz
-S
Uz
+
S
Uz1
-S
Uz
+S
Uz2
=0
T
+SU
z1
-SU
z
+SU
z2
!
!
!
0
2
sin
2
cos
1
1
1
1
dt
T
t
U
dt
T
t
U
T
t
t
m
T
t
t
m
t
1
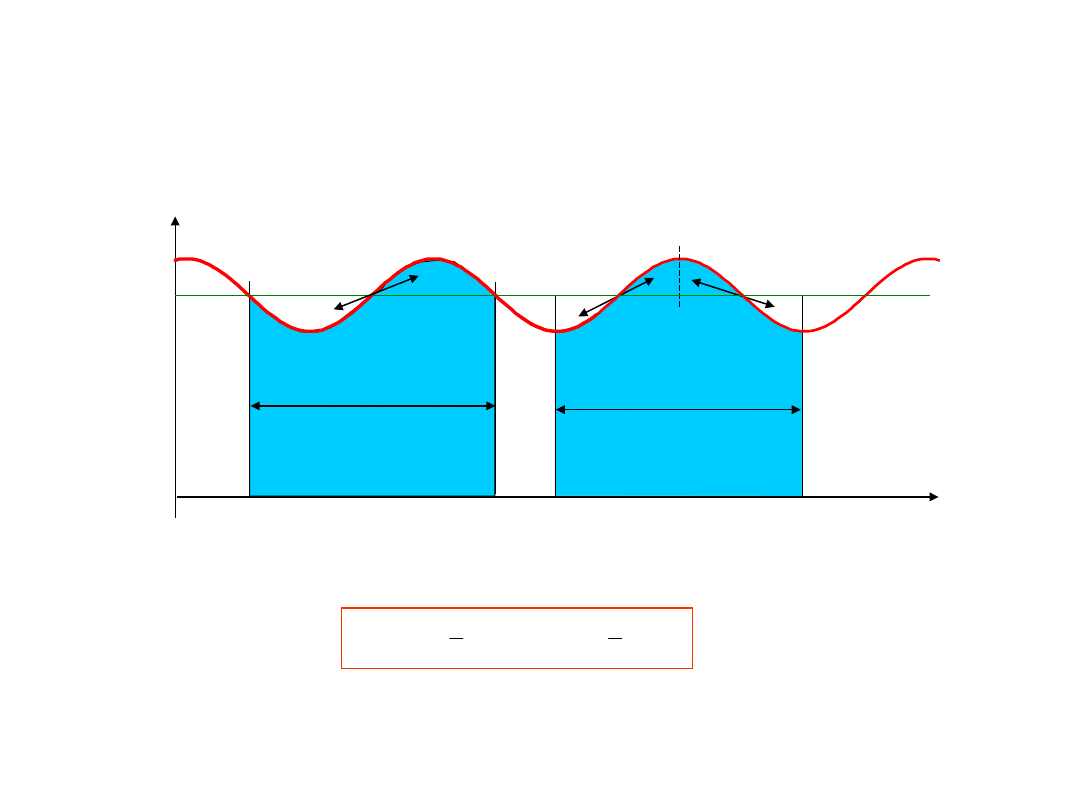
Wartość średnia zakłócenia w czasi
okresu
Wartość średnia od zakłócenia
harmonicznego w czasie jego okresu T
równa się zeru niezależnie od początku
całkowania!
!
!
!
0
2
sin
2
cos
1
1
1
1
dt
T
t
U
dt
T
t
U
T
t
t
m
T
t
t
m
U
x
Zakłócenie
T
1
=T
-
+
-
-
+
Czas
+
T
1
=T

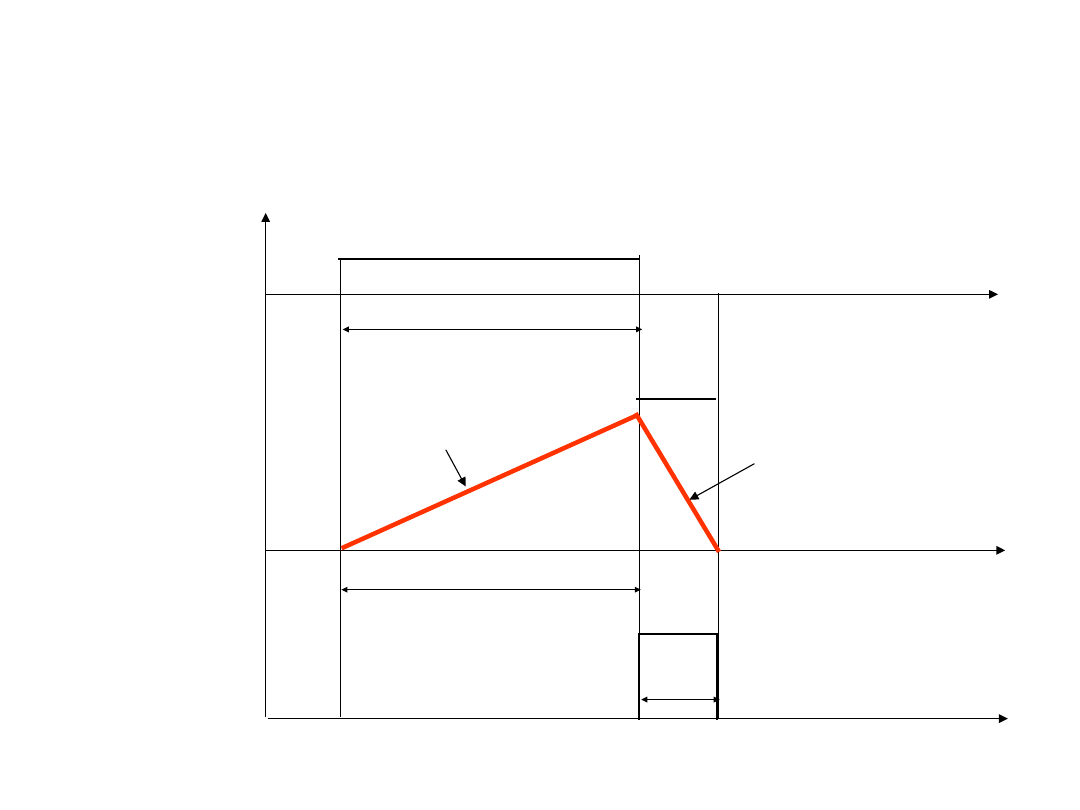
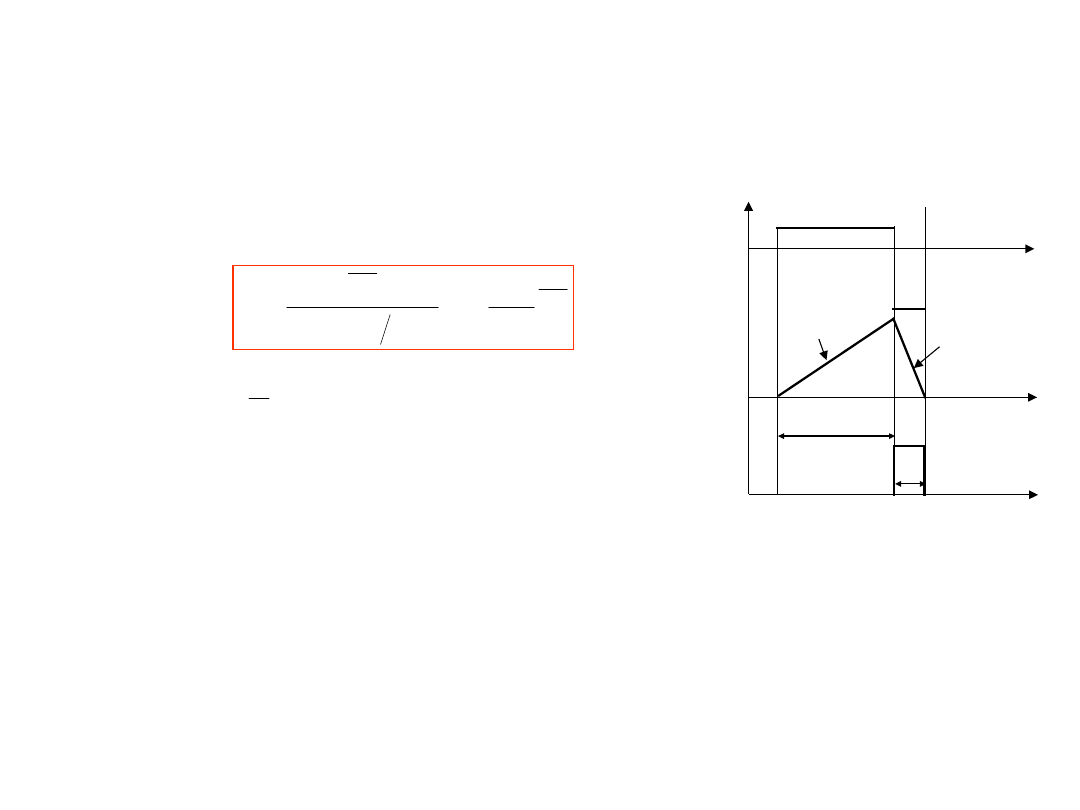
Metoda tłumienia zakłóceń okresowych
w woltomierze z dwukrotnym całkowaniem
Metoda ta charakteryzuje się bardzo dobrymi
parametrami metrologicznymi, zwłaszcza w stosunku
dokładności przetwarzania oraz odporności na
zakłócenia.
Zasada przetwarzania
polega na:
całkowaniu sygnału
(napięcia, prądu) wejściowego U
x
(t)
w
ciągu interwału czasowego zadanej trwałości T
1
(pierwsza faza) i
zgromadzeniu ładunku Q
1
proporcjonalnego wartości średniej sygnału
wejściowego
z
następną kompensacją tego ładunku przez całkowanie
sygnału
(napięcia, prądu) referencyjnego U
ref
odwrotnej
polaryzacji i wyznaczaniu interwału czasowego T
x
tej
kompensacji (druga faza).
Metoda tłumienia zakłóceń okresowych
w woltomierze z dwukrotnym
całkowaniem
U
int
Całkowanie -U
ref
(2 faza)
t
1
t
2
T
x
U
x
(t)
-U
ref
T
1
Całkowanie U
x
(t)
(1 faza)
t
1
t
2
U
we
Czas
Wyjście
Czas
Czas
T
1
t
2
+T
x
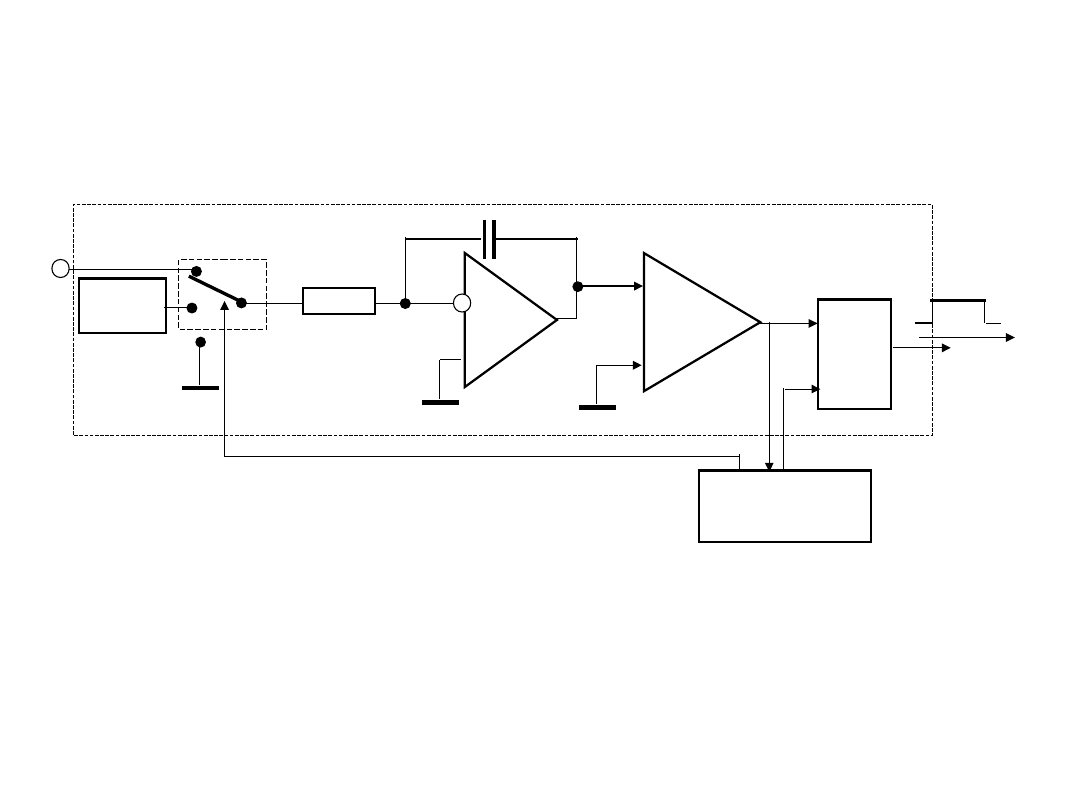
Uproszczony schemat przetwornika
napięcie – interwał czasowy z
dwukrotnym całowaniem
P
U
we
=U
x
(t)
U
int
(t)
-U
ref
Układ
sterowani
a
WO
Komp
.
C
R
1
T
x
Stop
RS
Start
t
0i
Wyjście
1
2
3
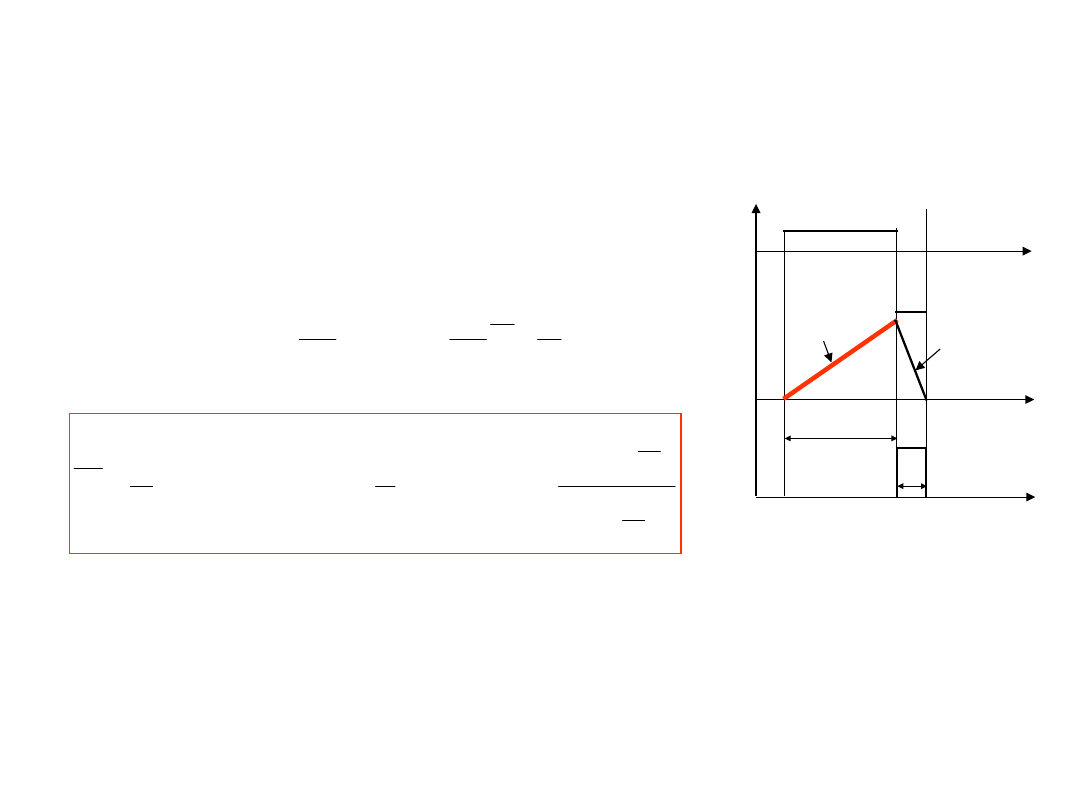
Metoda przetwarzania
w woltomierze z dwukrotnym
całkowaniem
Podczas całkowania napięcie wejściowego U
x
(t) w
interwale czasowym od t
1,i
do t
2,i
=t
1,i
+T
1
(w
ciągu zadanego i stałego interwału czasowego
T
1
) napięcie na wyjściu integratora osiąga
wartość
gdzie
jest wartością średnią napięcia wejściowego
(przetwarzanego) w czasie pierwszego
całkowania T
1
(pierwsza faza całkowania)
C
Q
U
C
R
T
dt
t
U
C
R
T
U
x
T
t
t
x
1
1
1
1
1
int
1
1
1
)
(
1
)
(
T
T
T
T
U
U
dt
T
t
U
U
T
U
m
x
T
t
t
m
x
x
1
1
1
2
2
sin
2
cos
1
1
1
1
Całkowanie -U
ref
(2 faza)
t
0
t
1
T
x
U
x
(t)
-U
ref
T
1
Całkowanie
U
x
(t) (1
faza)
t
1
t
2
=t
1
+T
1
U
we
U
int
Czas
Wyjście
Czas
Czas
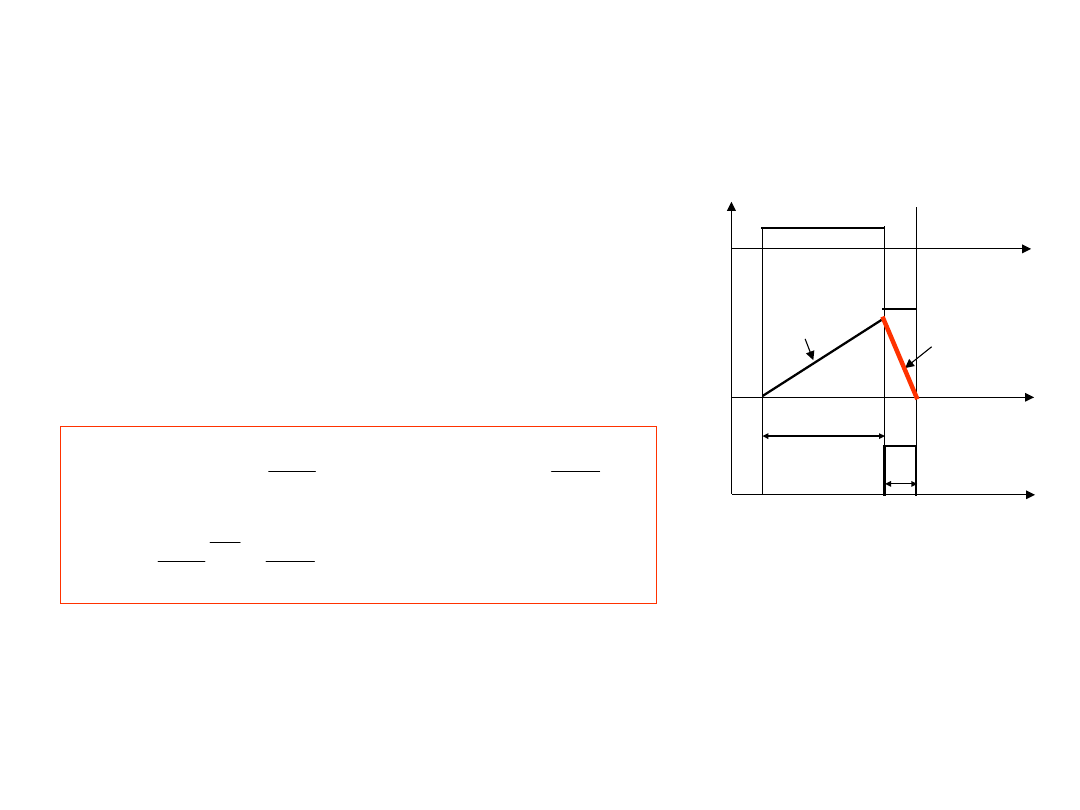
Metoda przetwarzania
w woltomierze z dwukrotnym
całkowaniem
Następnie do wejścia integratora zostaje
podłączone napięcie referencyjne
U
ref
odwrotnej
polaryzacji
i na jego wyjściu wartość napięcia
będzie się obniżać (2 faza całkowania) aż do
zera w moment czasowy
t
3
= t
2
+T
x
Całkowanie
-U
ref
(2 faza)
t
1
t
2
T
x
U
x
(t)
-U
ref
T
1
Całkowanie
U
x
(t) (1 faza)
t
1
t
3
=t
2
+T
x
U
we
U
int
Czas
Wyjście
Czas
Czas
x
ref
x
x
ref
T
t
t
ref
T
C
R
U
U
C
R
T
T
C
R
U
T
U
dt
U
C
R
T
U
t
U
x
1
1
1
1
1
int
1
1
int
int
)
(
1
)
(
)
(
2
2
t
2
t
3
=t
2
+T
x
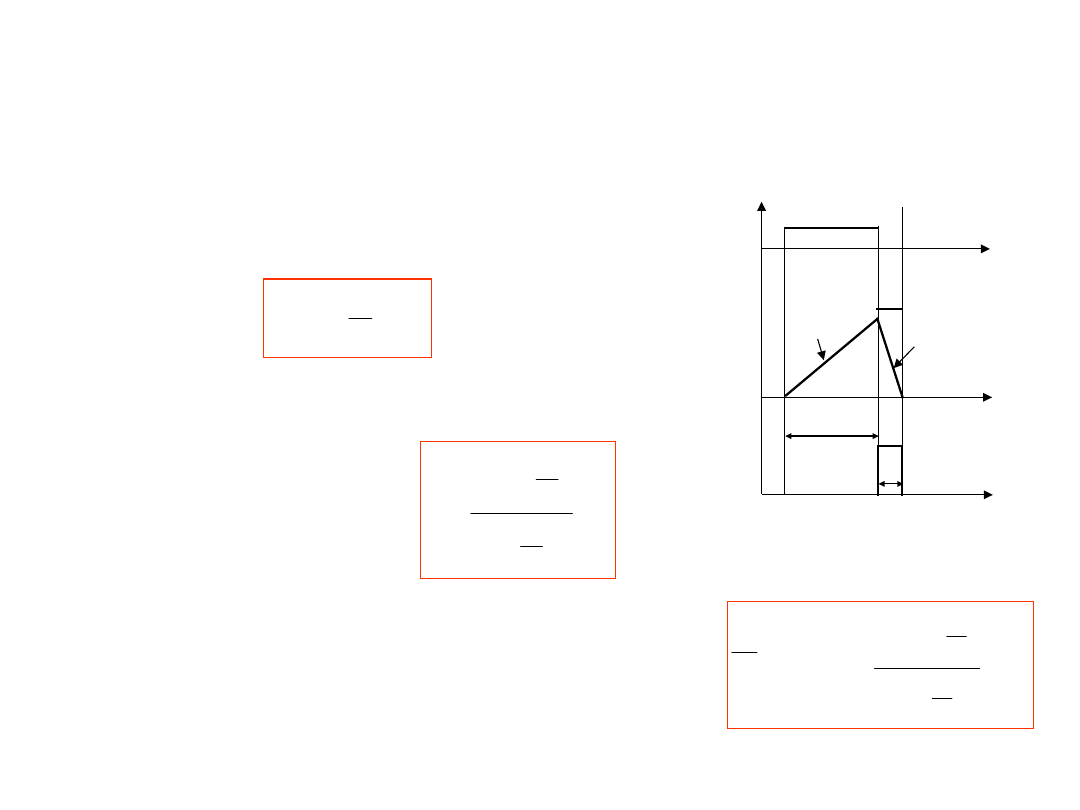
Metoda przetwarzania
w woltomierze z dwukrotnym
całkowaniem
Interwał czasowy podczas którego został
rozładowany kondensator równa się
I jest proporcjonalny do wartości średniej
napięcia wejściowego
I jest to
funkcja przetwarzania przetwornika
.
x
ref
ref
x
x
U
U
T
T
C
R
U
C
R
U
T
1
1
1
`
1
`
Całkowanie
-U
ref
(2 faza)
t
1
t
2
T
x
U
x
(t)
-U
ref
T
1
Całkowanie
U
x
(t) (1 faza)
t
1
t
2
U
we
U
int
Czas
Wyjście
Czas
Czas
t
3
t
3
x
U
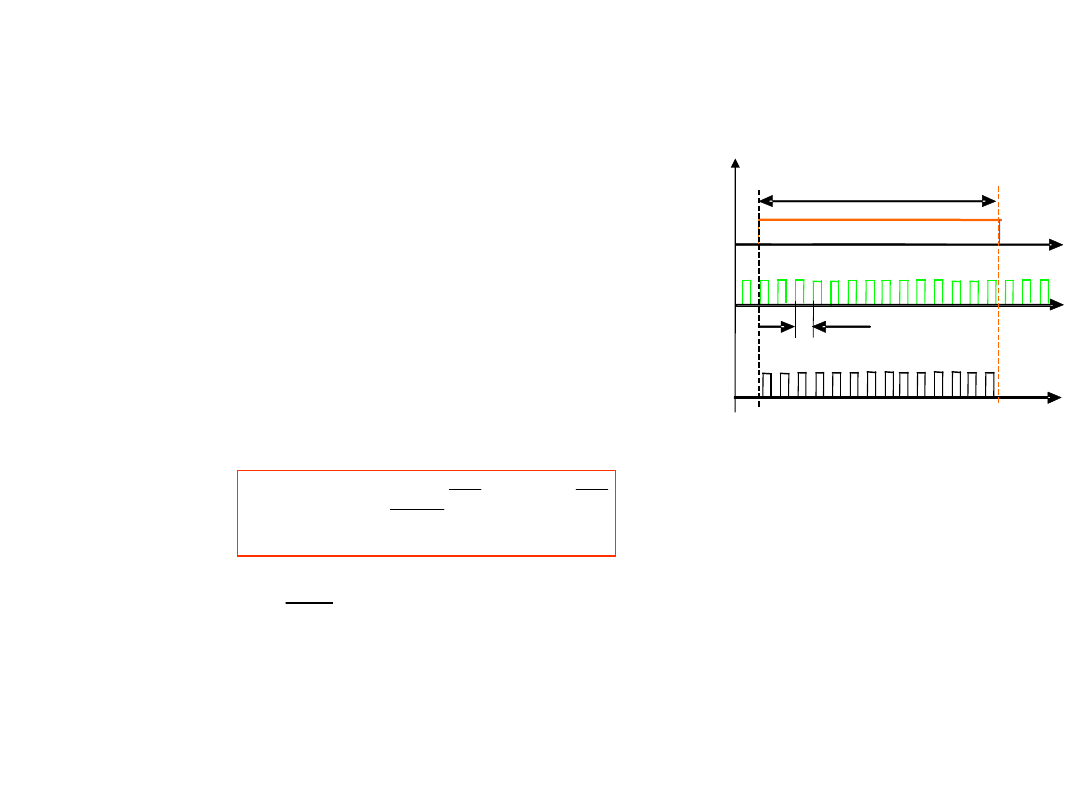
Metoda przetwarzania
w woltomierze z dwukrotnym
całkowaniem
W interwale czasowym
T
x
będą
zliczany impulsy o częstotliwości
wzorcowej
f
w
, dlatego wynik
przetwarzania A/C w zależności
od wartości średniej napięcia
wejściowego
(
funkcja przetwarzania
) opisuje się
wzorem
Gdzie
jest
współczynnikiem
przetwarzania
przetwornika A/C z
dwukrotnym całkowaniem
x
C
A
x
ref
w
w
x
x
U
k
U
U
f
T
f
T
N
/
1
ref
w
C
A
U
f
T
k
1
/
Czas
Czas
Impulsy o częstotliwości f
w
Impulsy zliczany przez licznik
T
x
T
w
=1/f
w
Czas
N
x
=T
x
f
w
t
1
t
x
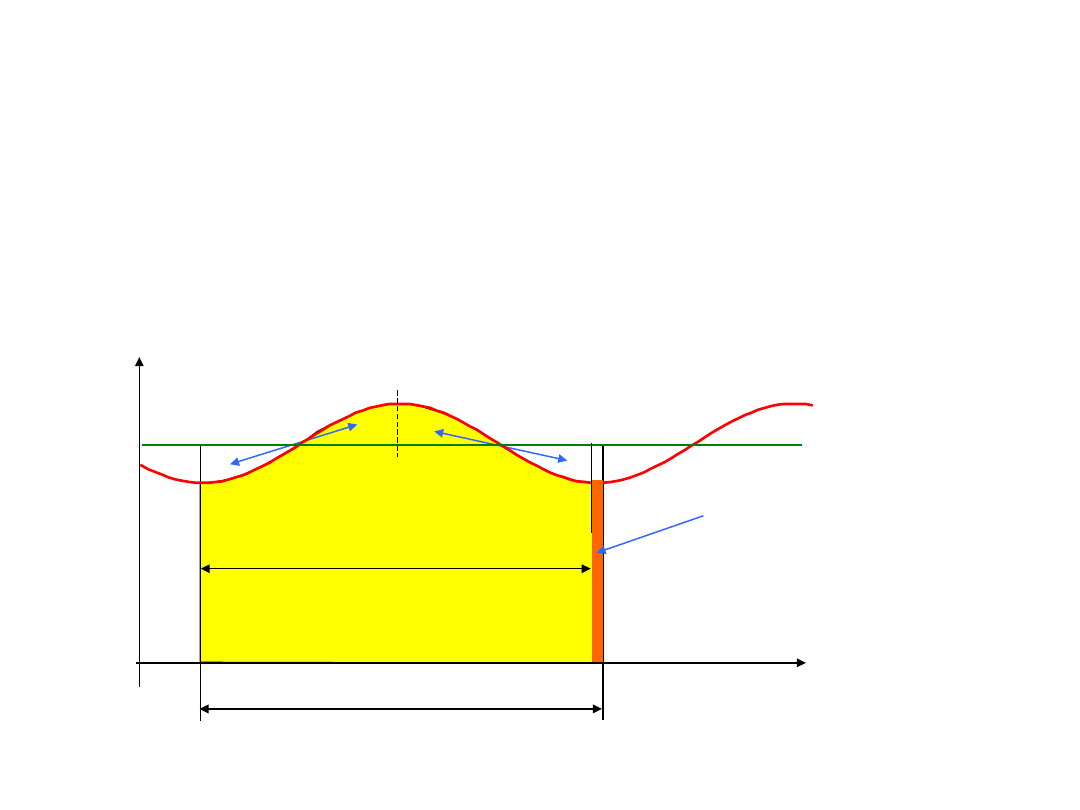
Współczynnik tłumienia zakłócenia okresowego w
woltomierzu z dwukrotnym całkowaniu
Jeśli czas
całkowania w pierwszej fazie jest równy
okresu zakłócenia okresowego
T
1
=T
Wtedy wartość składowej od zakłócenia
To jest we wzorze dla wartości średniej
składowa
od zakłócenia też równa się zeru
:
To jest
wynik przetwarzania nie zależy od
wartości zakłócenia a tylko od wartości
napięcia korzystnego U
x
Całkowani
e
-U
ref
(2
faza)
t
0
t
1
T
x
U
x
(t)
-U
ref
T
1
Całkowanie
U
x
(t) (1
faza)
t
0
t
1
U
we
U
int
Czas
Wyjście
Czas
Czas
t
x
t
x
0
2
sin
1
T
T
0
sin
1
1
T
T
T
T
U
m
x
m
x
x
U
T
T
T
T
U
U
U
1
1
2
2
sin
Współczynnik tłumienia zakłócenia okresowego w
woltomierzu z dwukrotnym całkowaniu
U
x
Zakłócenie
T
1
T
+
-
-
+
Czas
Błąd
T
Jeśli jednak
czas całkowania w pierwszej fazie nie jest równy okresu
zakłócenia okresowego
T
1
≠T
,
na przykład w wyniku odchylenia częstotliwości
f
od wartości
nominalnej
f
n
wtedy wartość składowej od zakłócenia w wyniku całkowania
zakłócenia nie równa się zeru i przy :
Współczynnik tłumienia zakłócenia okresowego w
woltomierzu z dwukrotnym całkowaniu
Jeśli
względnym odchyleniem częstotliwości od nominalnej i jest małym
wtedy wartość składowej od zakłócenia (wartość błędu) w wyniku
całkowania zakłócenia nie równa się zeru i równa się :
Wynik przetwarzania nie zależy od wartości zakłócenia a tylko od
wartości napięcia korzystnego U
x
n
n
f
f
f
f
0
1
sin
1
1
sin
f
m
f
f
m
f
f
m
z
U
U
U
U
1
f
Współczynnik tłumienia zakłócenia okresowego
w woltomierzu z dwukrotnym całkowaniu
Współczynnikiem tłumienia zakłóceń szeregowych (K
tł
, NMRR
– normal mode rejection ratio) jest wyrażony decybeli stosunek
amplitudy U
m
zakłócenia sinusoidalnego do wartości
maksymalnego błędu ΔU
z,max
spowodowanego oddziaływaniem
tego zakłócenia
Dla małych odchyleń częstotliwości zakłócenia od nominalnej (jak
na przykład w przypadku zakłócenia sieciowego)
wartość współczynnika tłumienia zakłóceń zależy tylko od
max
,
lg
20
z
m
tl
U
U
NMRR
K
1
f
f
f
f
m
m
tl
U
U
NMRR
K
lg
20
lg
20
Współczynnik tłumienia zakłócenia okresowego
w woltomierzu z dwukrotnym całkowaniu
Dla
%)
1
(
01
,
0
f
)
100
(
40
01
,
0
lg
20
lg
20
razy
dB
K
f
tl
Współczynnik tłumienia zakłócenia okresowego
w woltomierzu z dwukrotnym całkowaniu
Jeśli odchylenia częstotliwości zakłócenia od nominalnej jest duże
wtedy teoretyczna wartość współczynnika tłumienia zakłóceń
wyznaczana jest wzorem
Gdzie
Jest względną częstotliwością (według czasu całkowania w pierwszej
fazie)
v
v
T
f
v
K
z
teor
tl
sin
lg
20
1
,
1
T
f
v
z
Współczynnik tłumienia zakłócenia okresowego
w woltomierzu z dwukrotnym całkowaniu
Jeśli odchylenia częstotliwości zakłócenia od nominalnej jest duże
wtedy teoretyczna wartość współczynnika tłumienia zakłóceń
wyznaczana jest wzorem
v
v
T
f
v
K
z
teor
tl
sin
lg
20
1
,
0 0.5 1
1.5 2 2.5 3
3.5 4 4.5 5
5.5 6
0
10
20
30
40
50
60
Ktl
i
v
i
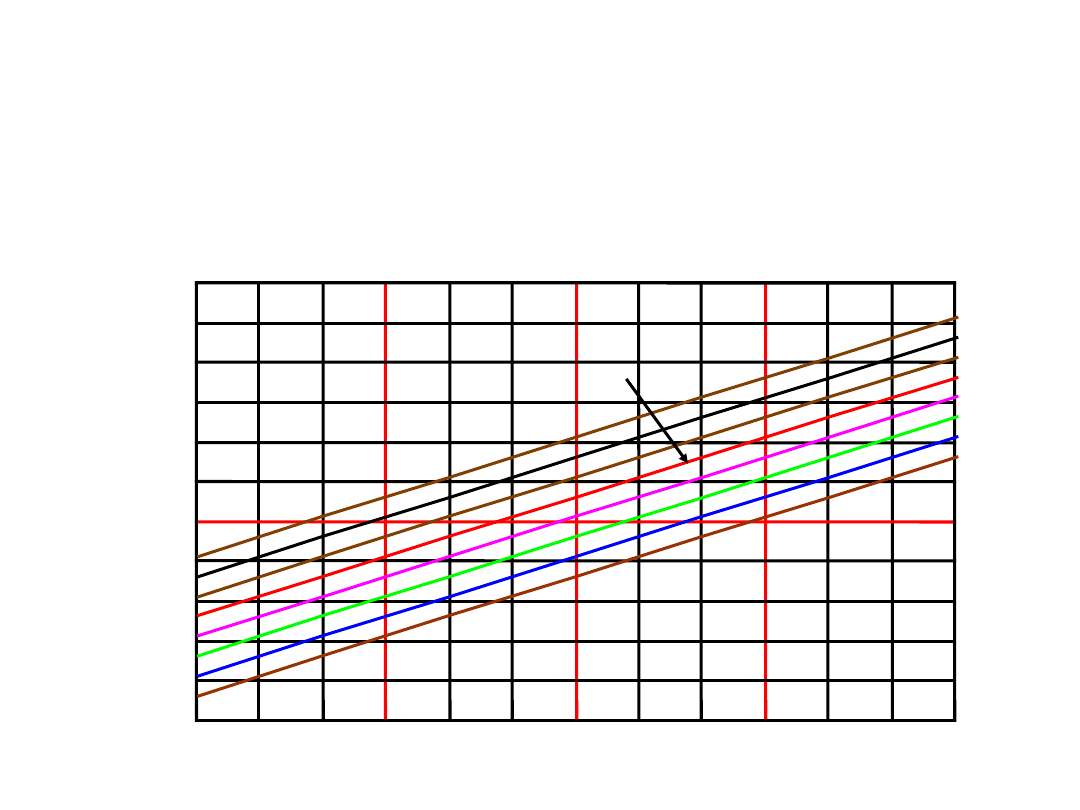
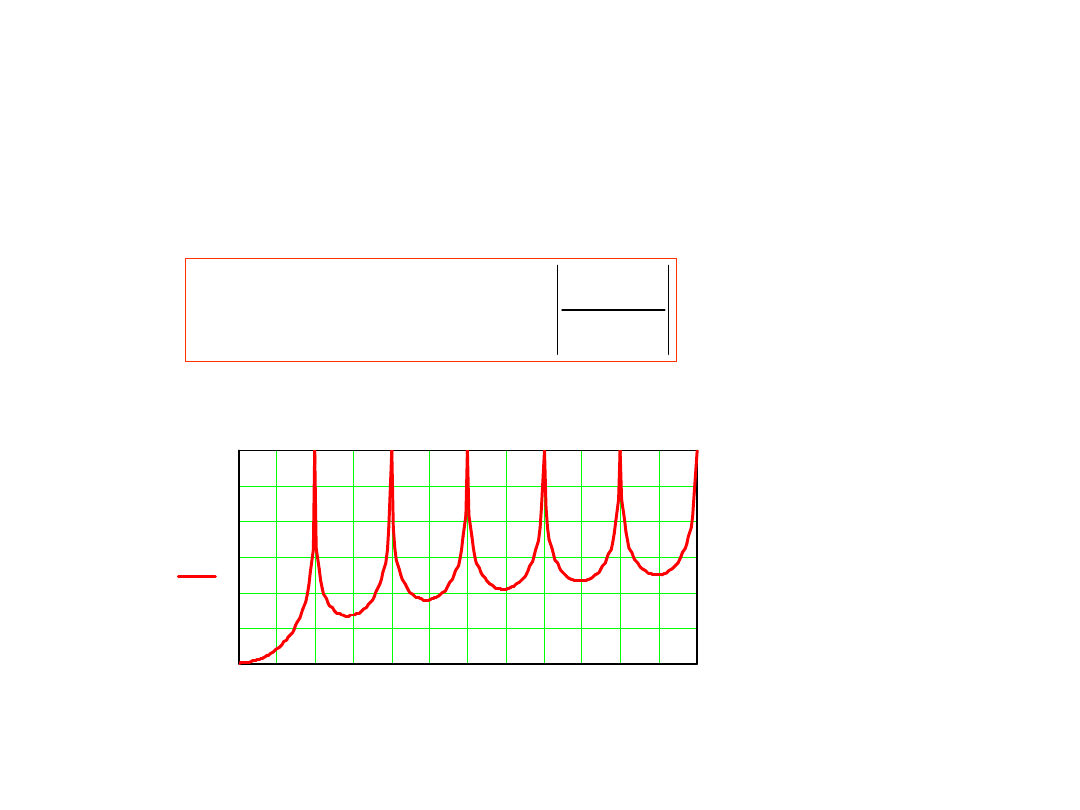
Współczynnik tłumienia zakłócenia okresowego
w woltomierzu z dwukrotnym całkowaniu
Wnioski:
1.
Dla pełnego tłumienia zakłócenia harmonicznego należy
całkować sygnał wejściowy w czasie jednego lub kilku okresów
zakłócenia
T
1
=m×T
z
=m/f
z
.
1.
Oprócz pierwszej składowej harmonicznej bęą tłumione
wszystkie wyższe składowe: wielokrotności podstawowej
f
k
=k×f
z
2.
Jeśli częstotliwość zakłócenia zmienia się tak, że w czasie
całkowania
nie umieszcza się całkowita liczba okresów
zakłócenia
, to zakłócenia nie będzie tłumione całkowicie i
pozostawanie
niezerowy błąd od zakłócenia
.
3.
Współczynnikiem tłumienia zakłócenia szeregowego (
K
tł
) jest
wyrażony decybeli stosunek amplitudy
U
m
zakłócenia
sinusoidalnego do wartości maksymalnego błędu
ΔU
z,max
4.
Dla małych odchyleń częstotliwości zakłócenia od nominalnej
wartość współczynnika tłumienia zakłóceń zależy tylko od
względnej niestabilności częstotliwości
f
tl
K
lg
20
max
,
lg
20
z
m
tl
U
U
K
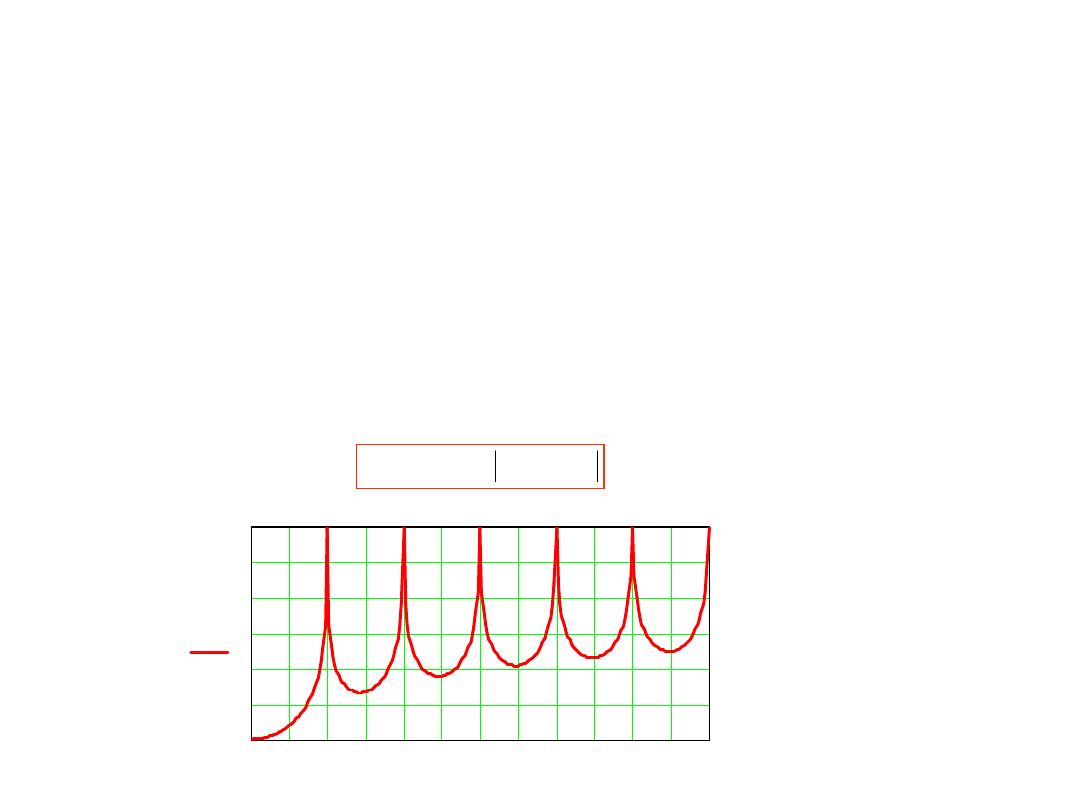
Współczynnik tłumienia zakłócenia okresowego
w woltomierzu z dwukrotnym całkowaniu
7. Dla dużych odchyleń częstotliwości zakłócenia od nominalnej
wartość współczynnika tłumienia zakłóceń osiąga teoretycznie
nieskończone wartości na częstotliwościach krotnych
odwrotności interwału czasowego całkowania w pierwszej fazie
f
k
=k×1/T
1
a dla częstotliwości pomiędzy tymi częstotliwościami osiąga
minimalne wartości
0 0.5 1
1.5 2 2.5 3
3.5 4 4.5 5
5.5 6
0
10
20
30
40
50
60
Ktl
i
v
i
5
,
0
lg
20
,
k
K
teor
tl
2. Wymagania do woltomierzy DC.
Zakresy
Możliwość pomiaru wartości napięcia w różnych zakresach
zapewnia się wykorzystaniem na wejściu woltomierza
-
wzmacniacza
- dla małych wartości napięć;
-
dzielnika
– dla dużych wartości napięć.
8.937m
V
0,1 mV 1 mV 10 mV
100mV
1 V 10 V 100 V
1000 V

2. Wymagania do woltomierzy DC.
Zakresy
Typowe zakresy woltomierzy są krotne:
wartościom
10
n
, gdzie
n
– liczba całkowita, ujemna i
dodatnia, na przykład
0,001 V (1 mV) 0,01 V (10 mV); 0,1 V (100 mV); 1 V,
10 V, 100 V; 1000 V
,
lub krotne wartościom
2·10
n
, na przykład :
0,002 V (2 mV) 0,02 V (20 mV); 0,2 V (200 mV); 2 V,
20 V, 200 V
.
2. Wymagania do woltomierzy DC.
Zakresy
Z zakresami pomiarowymi są powiązane
liczba cyfr
(miejsc znaczących) wskazania oraz
wartość cyfry
najmniej znaczącej
.
W woltomierze cyfrowym z liczbą cyfr dziesiątkowych
n
z zakresem
10
n
krotnym istnieje różnych
wskazań
od do ,
przy tym wartości cyfry najmniej znaczącej – CNZ
(ang. LSB) równa się:
n
0
...
00
n
9
...
99
n
z
U
LSB
CNZ
10
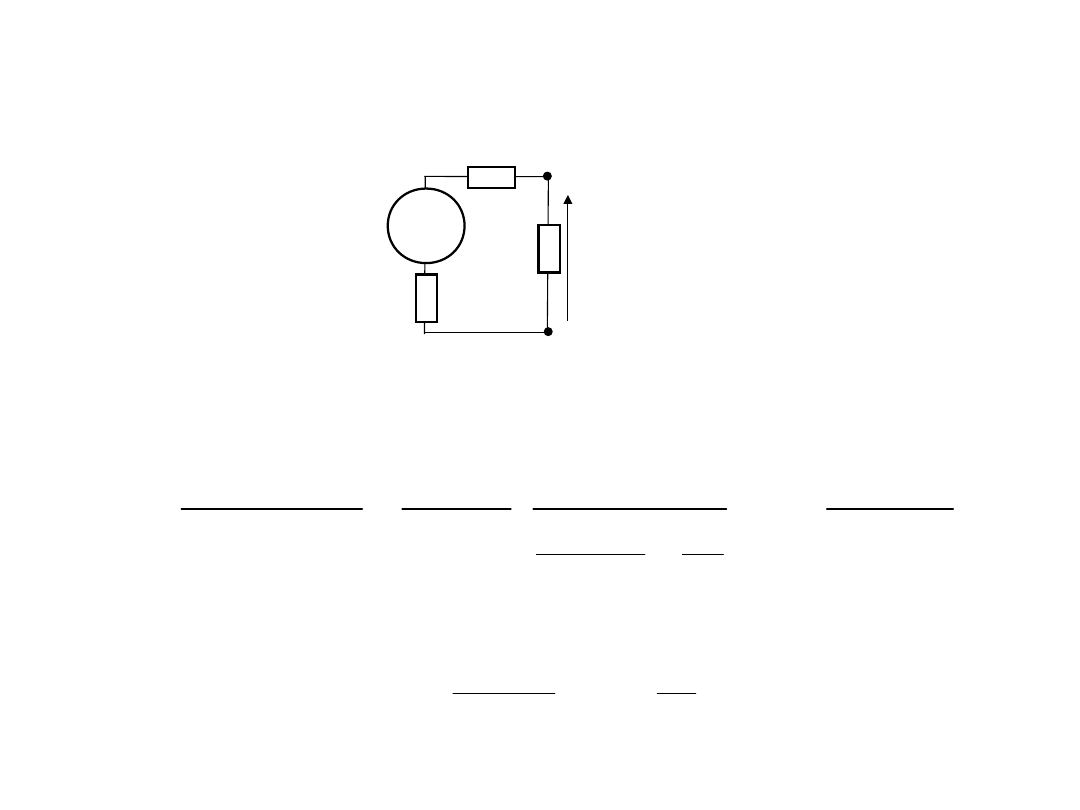
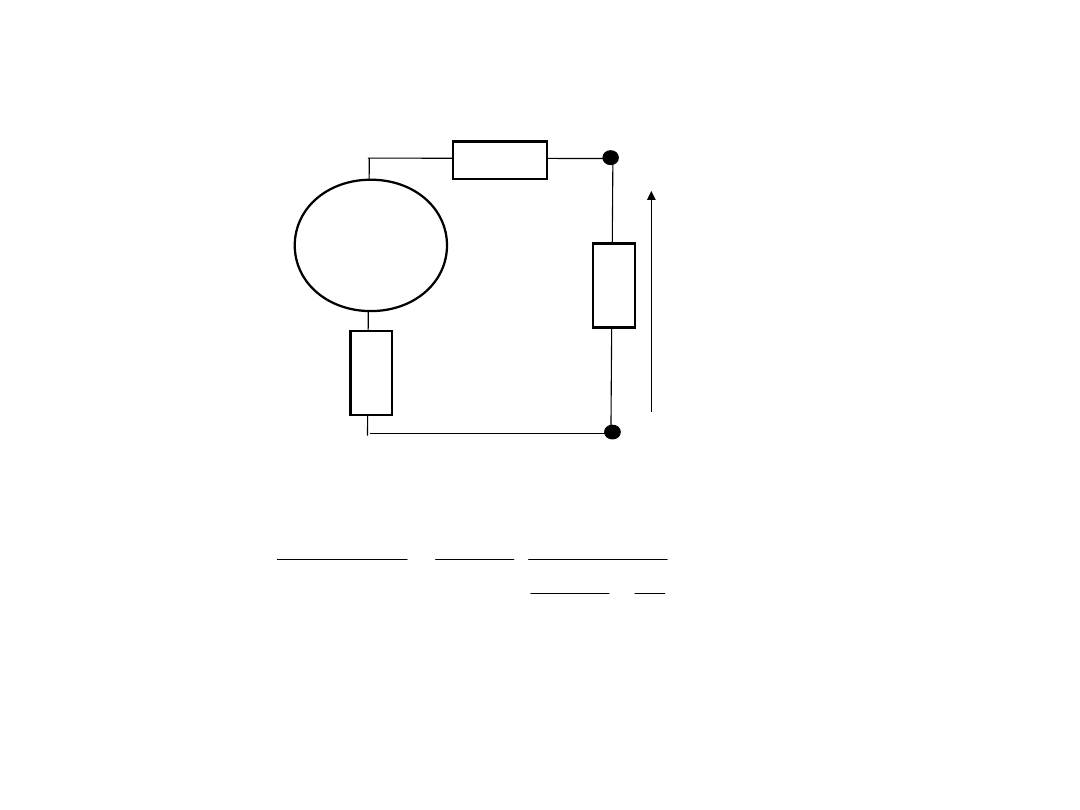
2. Wymagania do woltomierzy DC.
Rezystancja wejściowa
Do podłączenia
woltomierza wartość tego napięcia
wynosi
Po podłączeniu
woltomierza wynik pomiaru tego
napięcia wynosi
R
0
U
x
U
0
R
1
R
2
V
V
V
V
R
R
R
R
R
R
U
R
R
R
R
R
R
U
U
1
1
1
1
2
1
0
1
0
0
2
1
0
2
0
2
01
01
0
2
1
0
1
0
0
2
1
0
2
0
1
1
1
G
G
G
U
R
R
R
R
R
U
R
R
R
R
U
U
x
2
2
1
0
01
1
,
1
R
G
R
R
G
2. Wymagania do woltomierzy DC.
Rezystancja wejściowa
Do podłączenia
woltomierza wartość tego napięcia wynosi
V
R
R
R
R
R
U
R
R
R
R
U
U
x
9975
.
4
1
1
1
2
1
0
1
0
0
2
1
0
2
0
100Ω
10V
100k
Ω
100kΩ
4.9975
V
2. Wymagania do woltomierzy
DC.
Rezystancja wejściowa
Po podłączeniu
woltomierza wynik pomiaru tego
napięcia wynosi
I
V
R
0
U
V
U
0
R
1
R
2
R
V
V
U
x’
R
0
U
x
U
0
R
1
R
2
V
V
V
V
V
V
G
G
G
G
U
R
R
R
R
R
R
U
R
R
R
R
R
R
U
U
2
01
01
0
2
1
0
1
0
0
2
1
0
2
0
1
1
1
1
V
V
R
G
1
2. Wymagania do woltomierzy
DC.
Rezystancja wejściowa
Po podłączeniu
woltomierza wynik pomiaru tego
napięcia wynosi
V
R
R
R
R
R
R
U
R
R
R
R
R
R
U
U
V
V
V
V
97263
.
4
1
1
1
1
2
1
0
1
0
0
2
1
0
2
0
I
V
100Ω
4.97263
V
10V
100k
Ω
100k
Ω
10MΩ
V
U’
x
U
V
2. Wymagania do woltomierzy
DC. Rezystancja wejściowa
Zmniejszenie napięcia pomiarowego wynosi
Względny błąd
R
0
U
x
U
0
R
1
R
2
I
V
R
0
U
V
U
0
R
1
R
2
R
V
V
U’
x
I
0
2
01
2
01
)
(
G
G
G
U
G
G
G
G
U
U
U
U
V
V
V
V
x
x
V
R
v
V
V
x
R
R
G
G
G
G
U
U
V
v
2
01
)
(
2. Wymagania do woltomierzy
DC. Rezystancja wejściowa
Zmniejszenie napięcia pomiarowego
wynosi
Względny błąd
100Ω
U
x
=
=4.9975V
10V
100kΩ
100kΩ
I
V
100Ω
U
V
=
=4.97263
V
10V
100kΩ
100kΩ
10MΩ
V
U’
x
V
V
V
U
U
U
x
V
R
v
025
.
0
9975
.
4
97263
.
4
)
(
%
5
.
0
%
100
9975
.
4
025
.
0
)
(
V
V
U
U
x
R
R
V
v
2. Wymagania do woltomierzy
DC. Rezystancja wejściowa
Otóż wartość błędu metodycznego, spowodowanego
ograniczonej wartością rezystancji wejściowej woltomierza
zależy od stosunku ekwiwalentnej rezystancji obwodu ze
strony źródła (R
0
+R
1
) i rezystancji wejściowej woltomierza R
V
.
Zwiększenie rezystancji wejściowej woltomierza R
V
zapewnia
zmniejszenie błędu metodycznego
R
0
U
x
U
0
R
1
R
2
I
V
R
0
U
V
U
0
R
1
R
2
R
V
V
U
x’
1
)
(
1
)
(
2
01
2
01
G
G
R
G
G
G
G
U
U
V
V
V
x
R
R
V
v

2. Wymagania do woltomierzy DC.
Rezystancja wejściowa
Przykład 2.
Jeżeli wartości rezystancji obiektu badanego będą
o 10 razy
większe
R
1
=1 MOhm , R
2
=1 MOhm otrzymuje się:
- wskazanie woltomierza
- błąd metodyczny bezwzględny:
- błąd metodyczny względny:
Przy wartości rezystancji obiektu badanego porównywalnej do
rezystancji woltomierza R1=10 MOhm, R2=10 MOhm
otrzymuje się błąd metodyczny względny: .
Dla zmniejszenia tego błędu należy wykorzystać elektrometr z
większą rezystancję wejściową, na przykład RV=1 TOhm lub
większej, wtedy w ostatnim przypadku błąd metodyczny
względny:
V
U
x
4,99975
V
U
V
4,761655
V
U
v
R
0,24
)
(
%
8
,
4
v
R
%
33
v
R
%
5
,
0
v
R

2. Wymagania do woltomierzy DC.
Rezystancja wejściowa
Przykład 2.
Jeżeli wartości rezystancji obiektu badanego będą
o 10 razy
większe
R
1
=1 MOhm , R
2
=1 MOhm otrzymuje się:
- wskazanie woltomierza
- błąd metodyczny bezwzględny:
- błąd metodyczny względny:
Przy wartości rezystancji obiektu badanego porównywalnej do
rezystancji woltomierza R
1
=10 MOhm , R
2
=10 MOhm
otrzymuje się błąd metodyczny względny: .
Dla zmniejszenia tego błędu należy wykorzystać elektrometr z
większą rezystancję wejściową, na przykład R
V
=1 TOhm lub
większej, wtedy w ostatnim przypadku błąd metodyczny
względny:
V
U
x
4,99975
V
U
V
4,761655
V
U
v
R
0,24
)
(
%
8
,
4
v
R
%
33
v
R
%
5
,
0
v
R
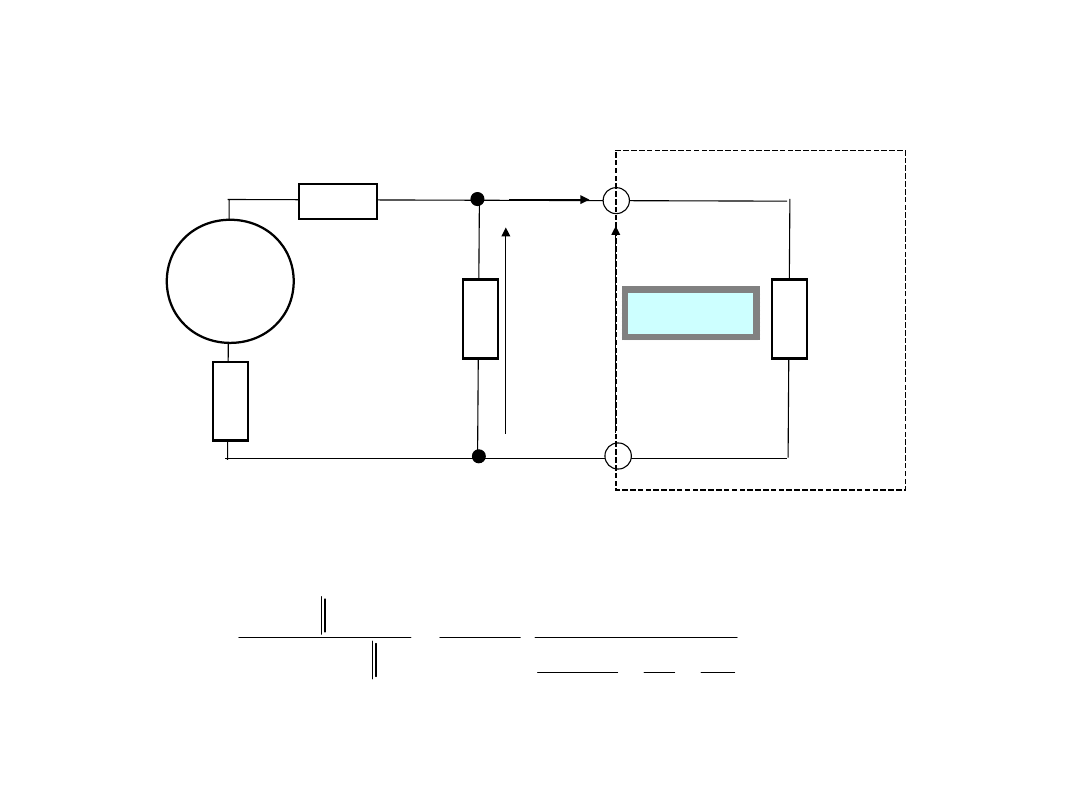
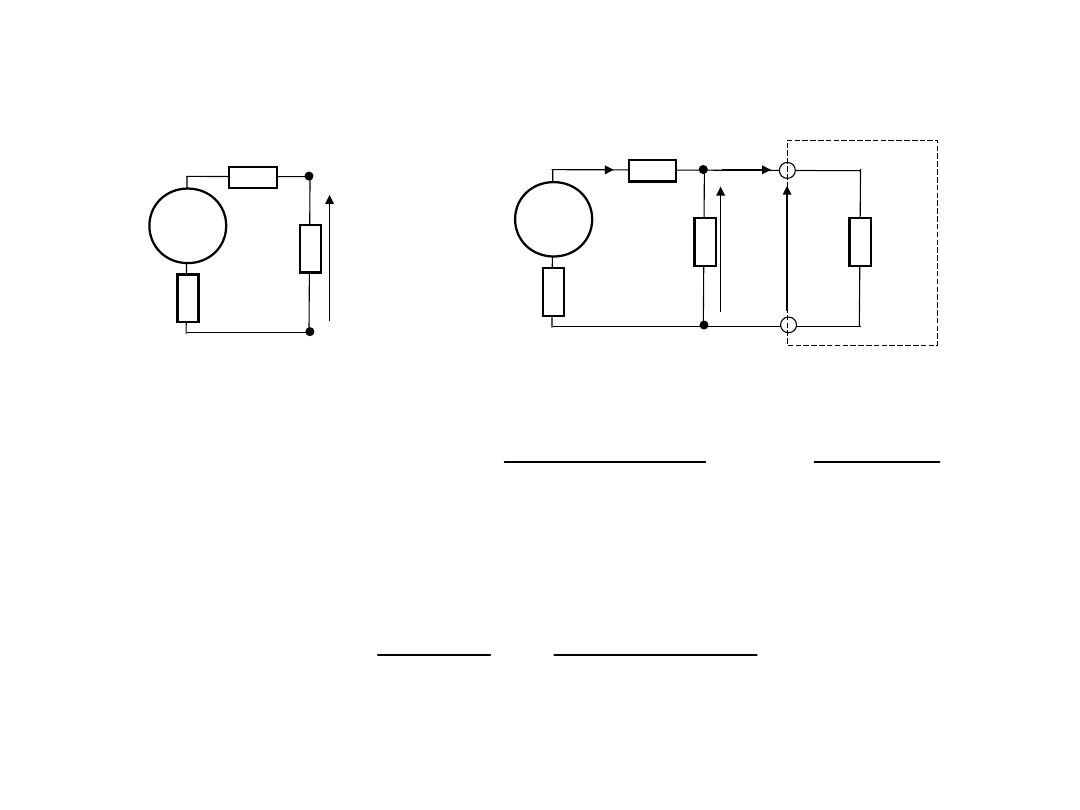
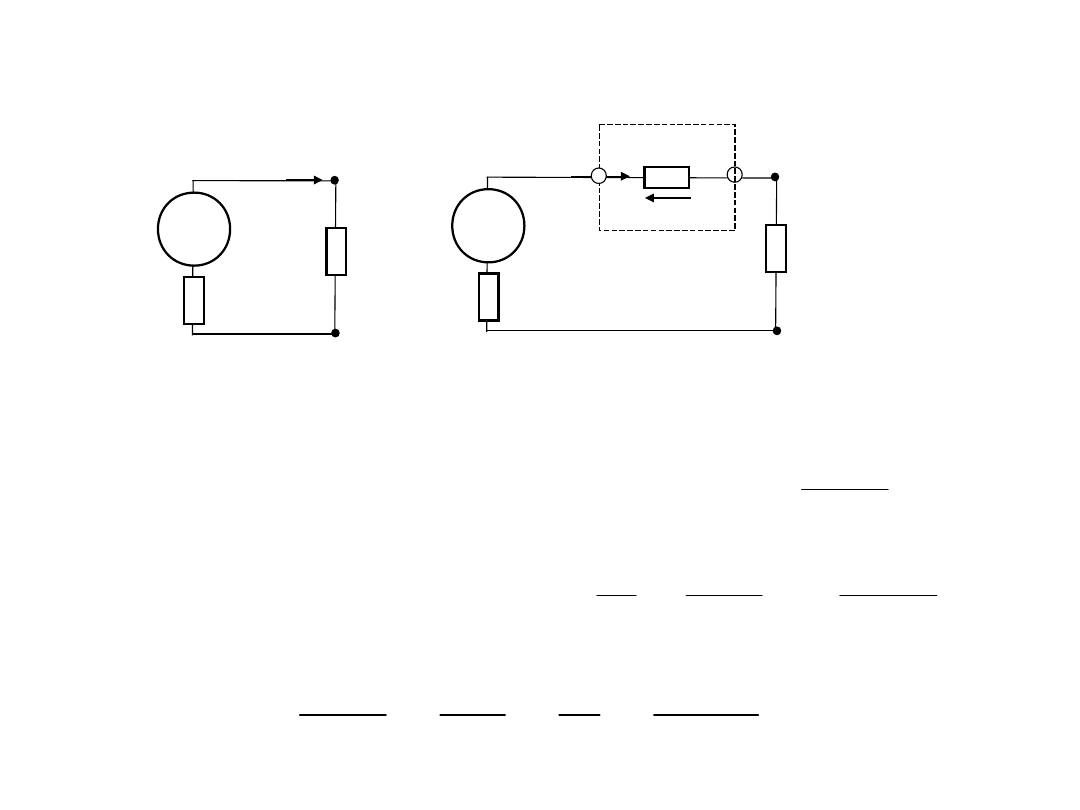
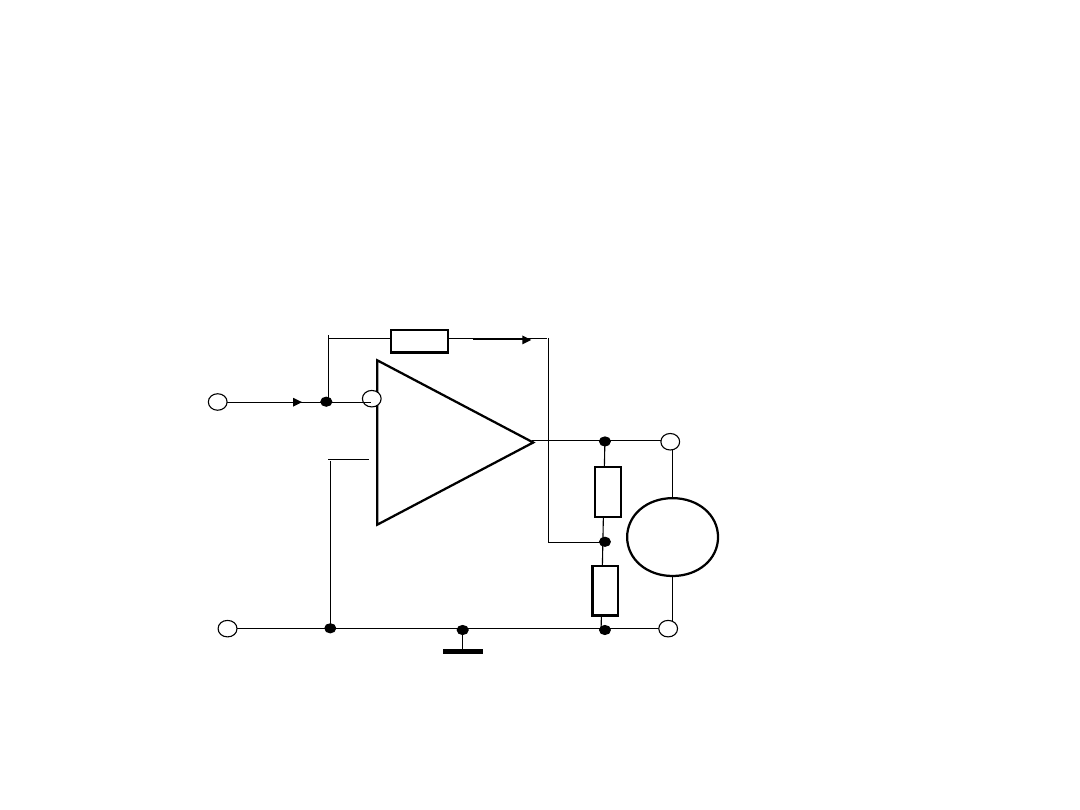
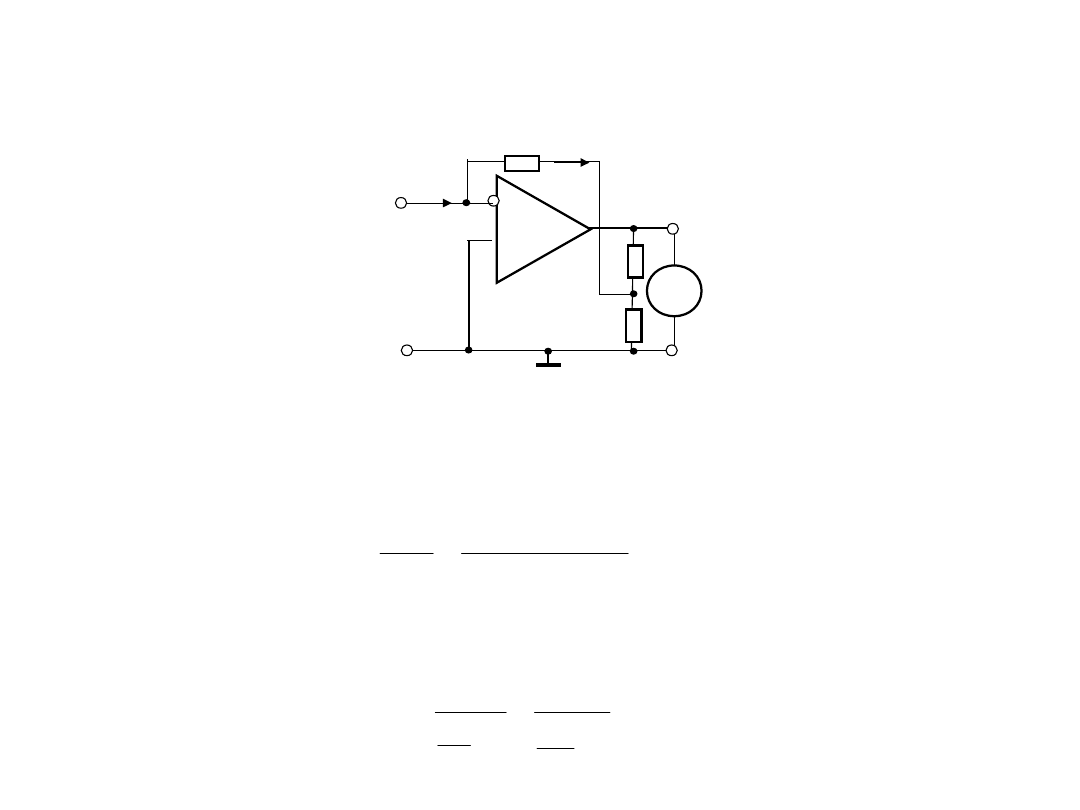
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• Jeżeli wartości parametrów obwodu pomiarowego
nie są znane, wtedy w eksperymentalny sposób
można oszacować wartość błędu metodycznego a
nawet jego skorygować!
• Ze wzoru podstawowego dla błędu
• wynika, że skorygowana wartość napięcia równa się
• lub
V
V
x
x
V
R
G
G
G
G
U
U
U
U
v
2
01
)
(
V
V
V
x
G
G
G
G
U
U
2
01
1
2
01
1
G
G
G
U
U
V
V
x
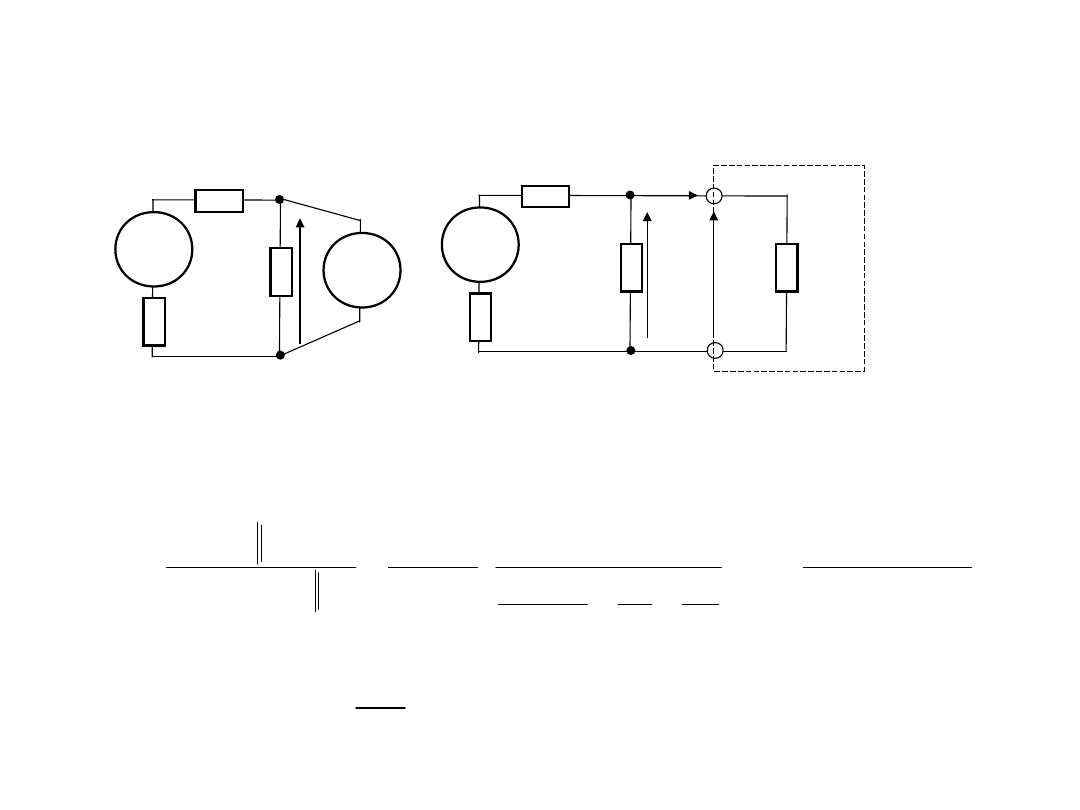
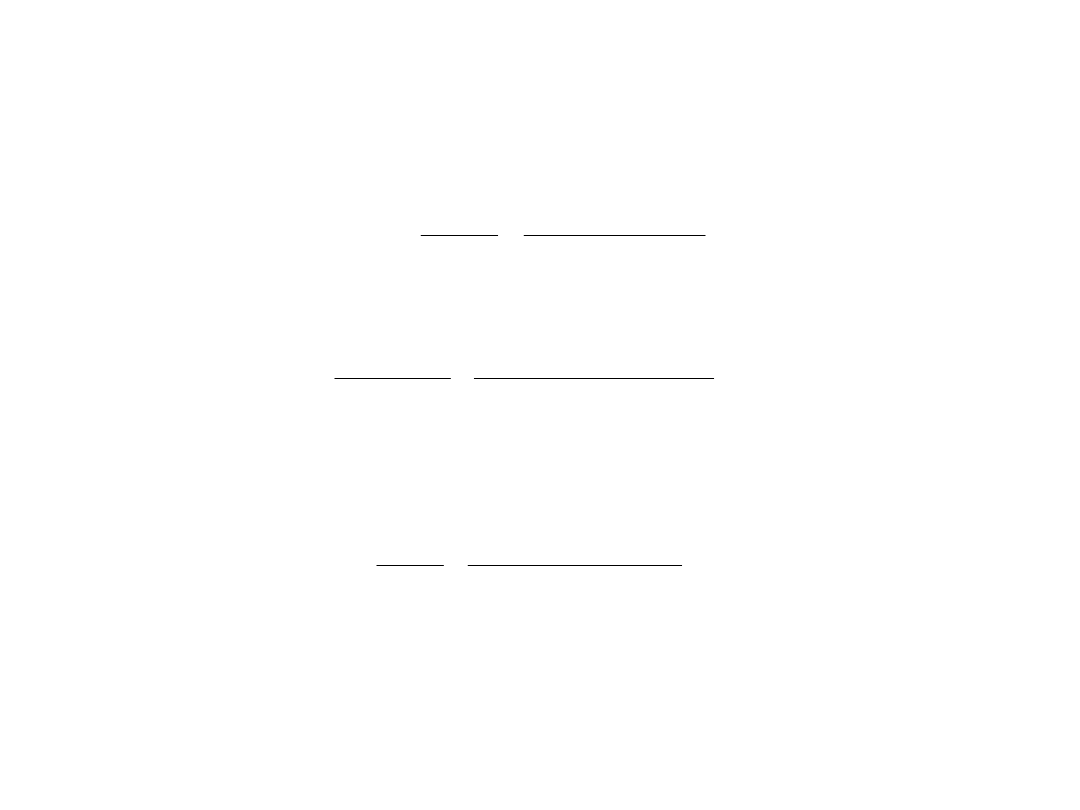
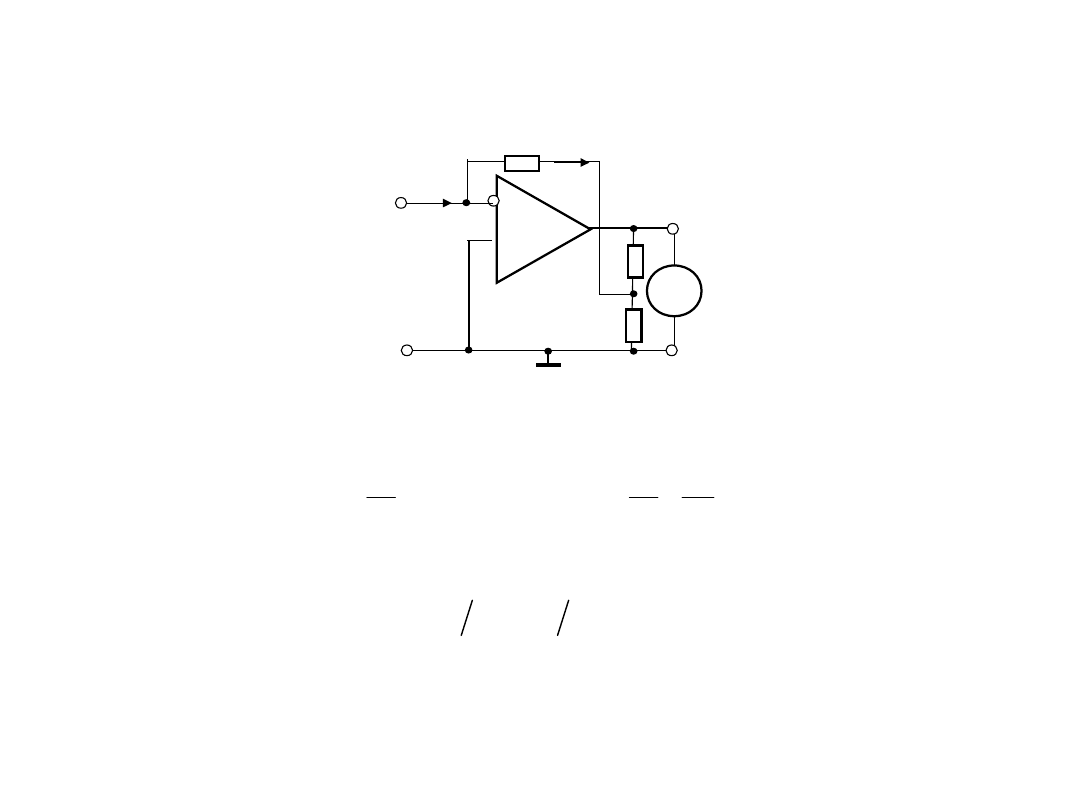
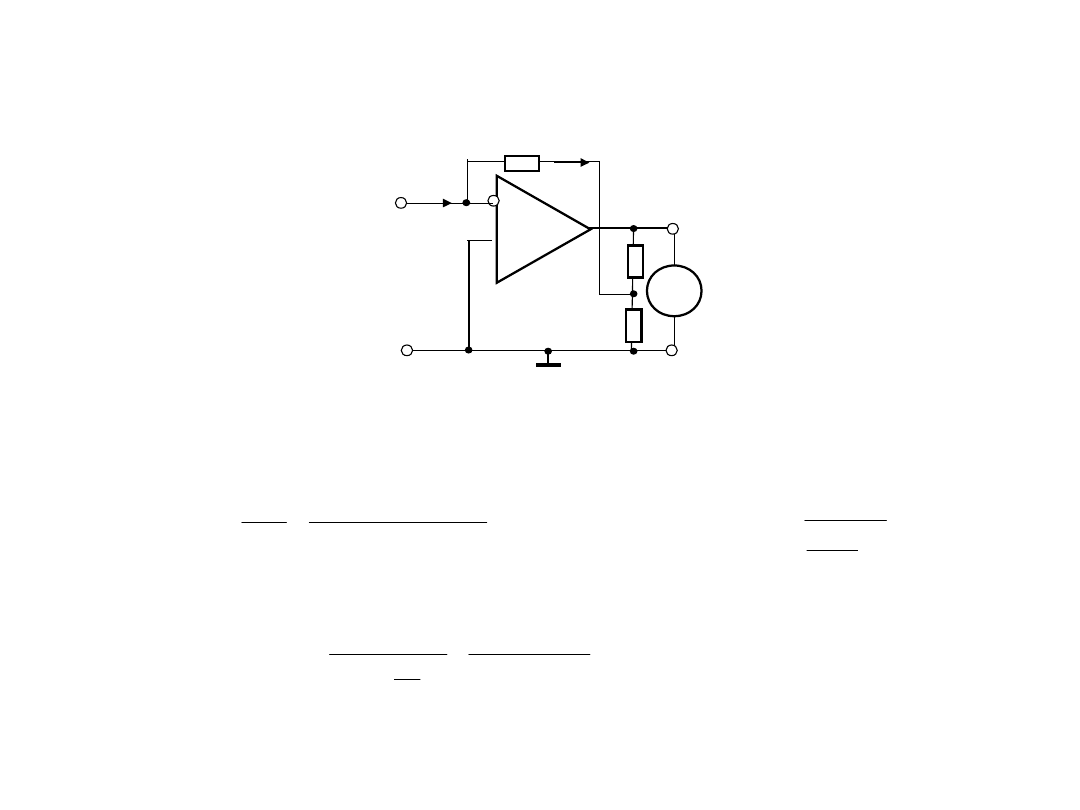
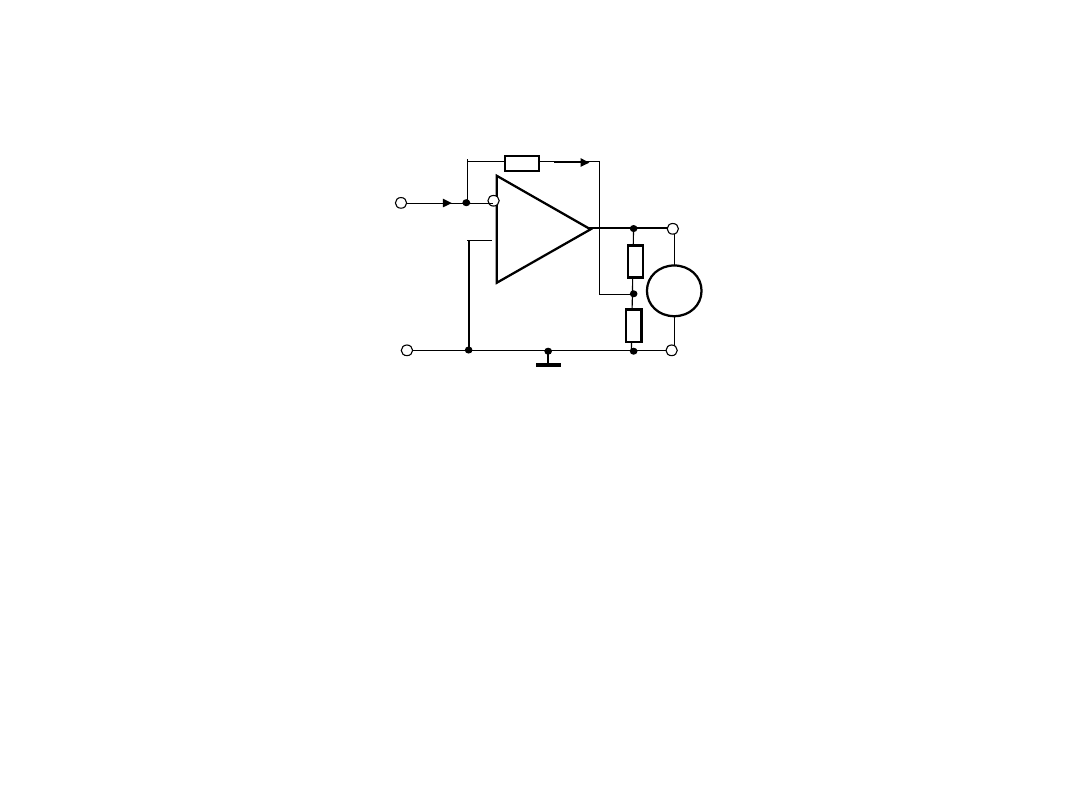
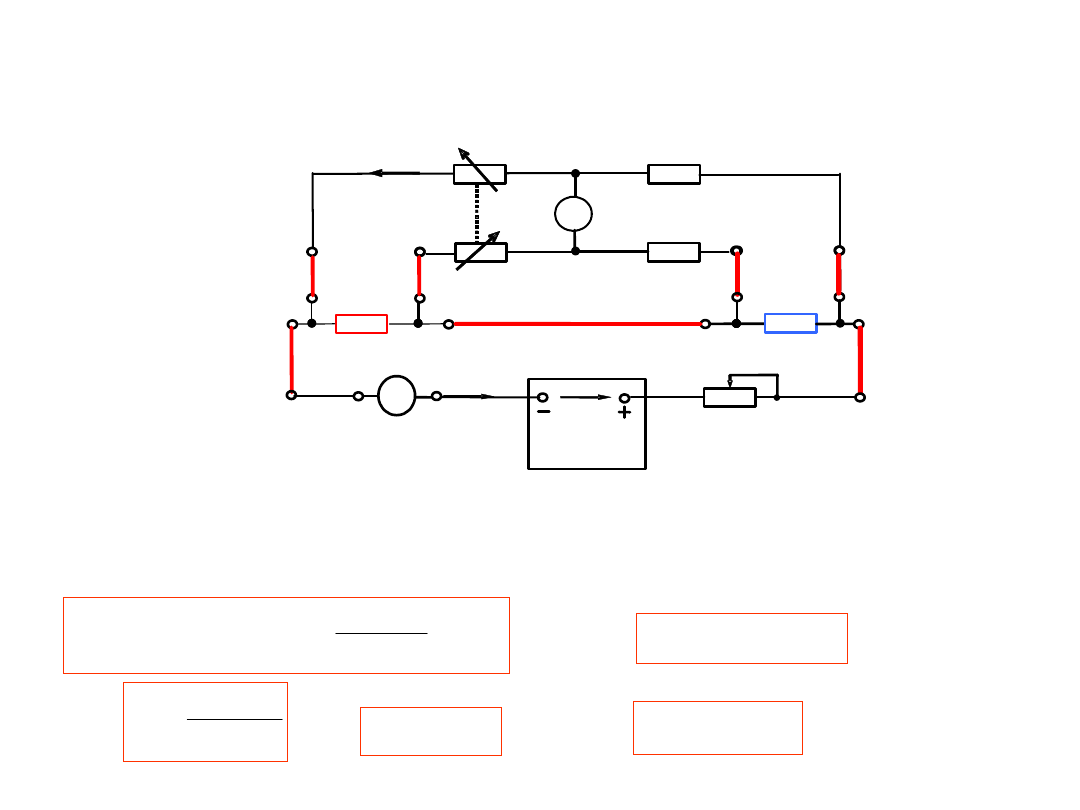
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• W celu jej wyznaczania i dalej dla korekcji wpływ rezystancji
woltomierza RV na wynik pomiaru napięcia należy
przeprowadzić dodatkowy pomiar napięcia z równoległym
włączeniem do woltomierza bocznika Rb o znanej wartości, na
przykład R
b
=R
V
R
0
U
Vb
U
0
R
1
R
2
R
V
V
R
b
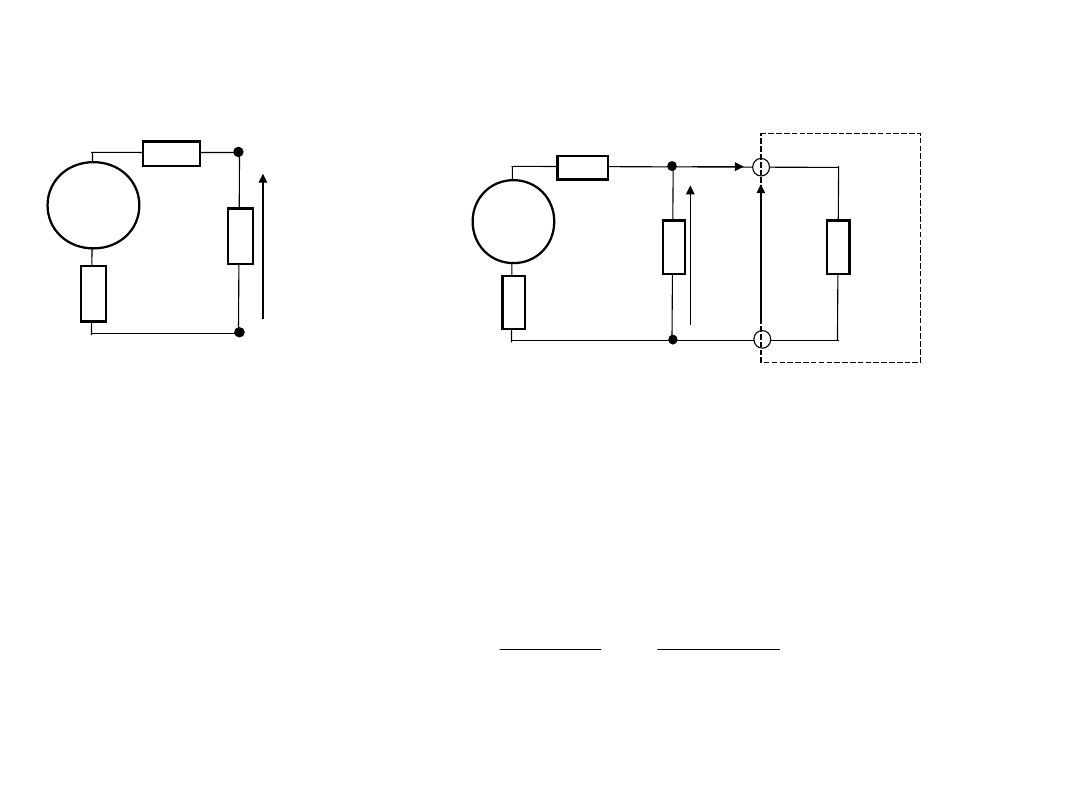
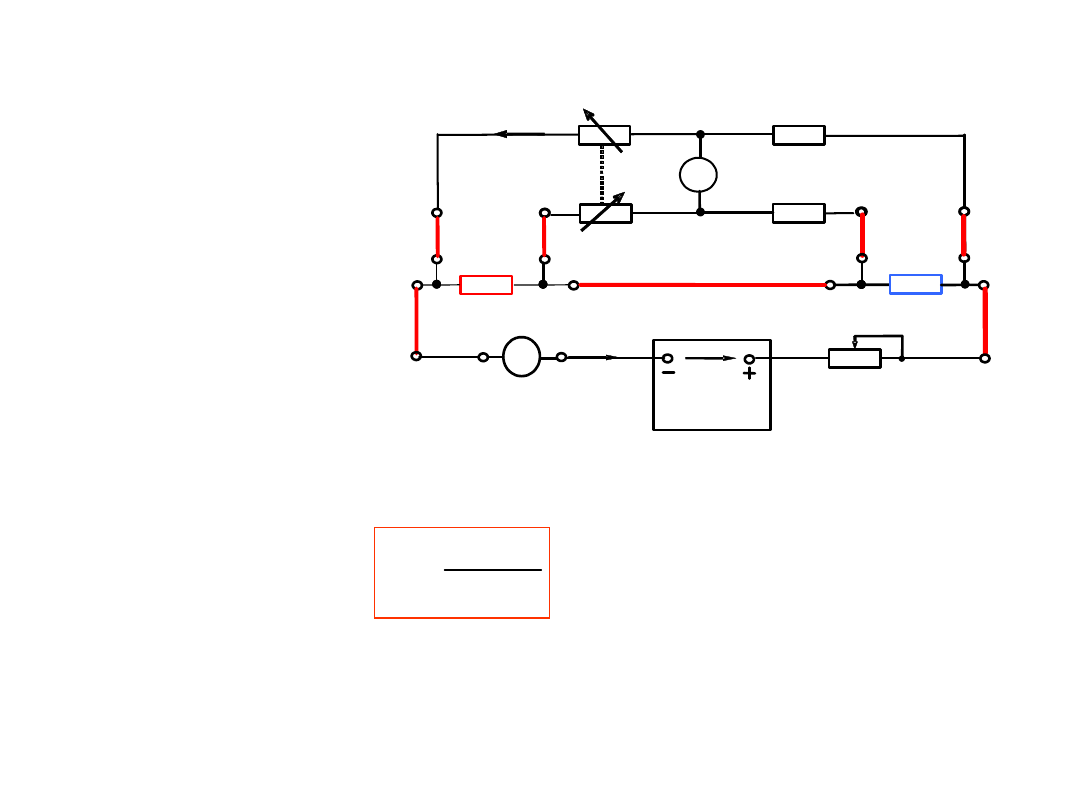
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• Wtedy wynik pomiaru napięcia w drugim pomiarze
R
0
U
Vb
U
0
R
1
R
2
R
V
V
R
b
b
V
Vb
G
G
G
G
G
U
U
2
01
01
0
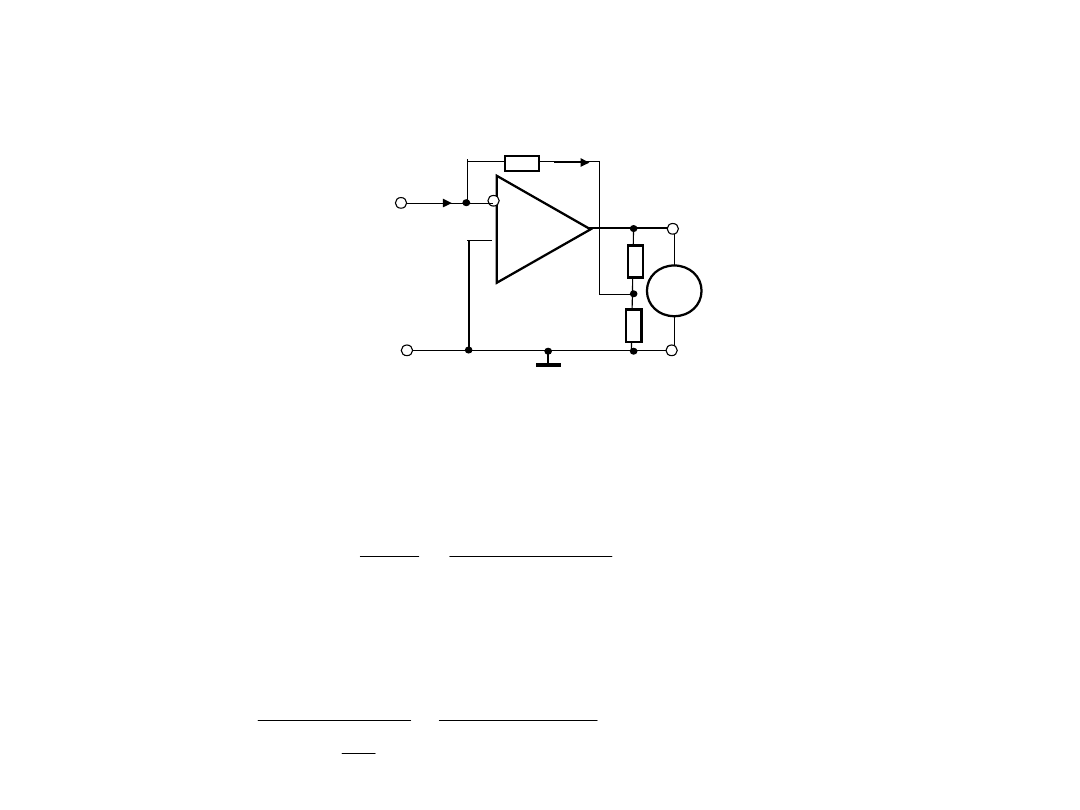
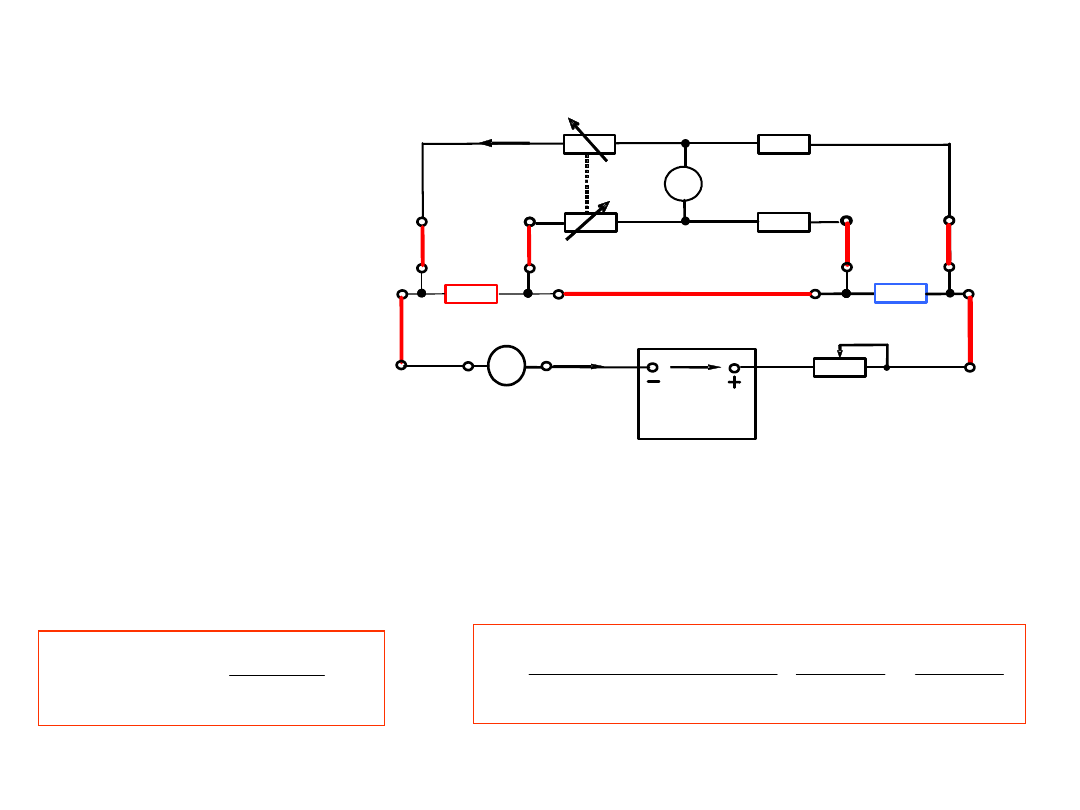
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• Jeśli stosunek rezystancji
• Oraz stosunek wskazań woltomierza
100
U
Vb
10V
100k
100k
R
V
=
=1M
V
R
b
= R
V
=1M
b
V
V
b
R
R
G
G
b
,
V
V
U
U
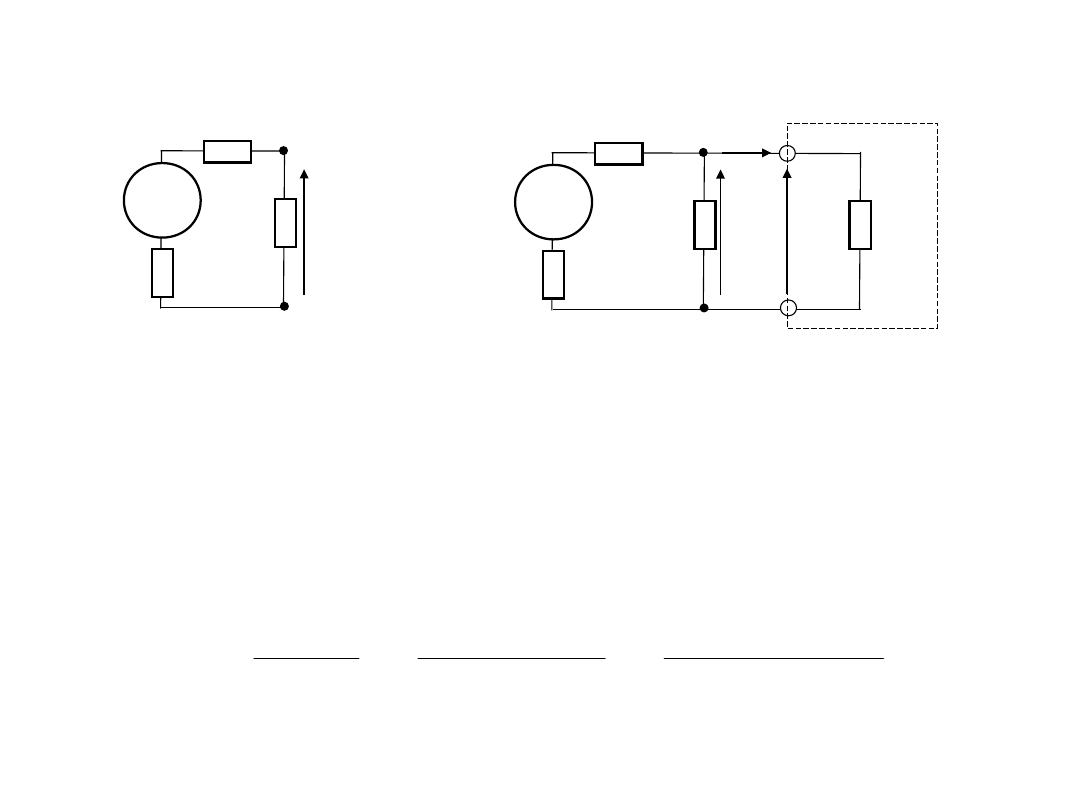
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• Wtedy skorygowana wartość napięcia
1
1
V
b
,
V
V
b
V
b
V
V
sk
U
U
U
R
R
R
R
U
U
R
0
U
Vb
U
0
R
1
R
2
R
V
V
R
b
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• Przy R
b
=R
v
• Wtedy skorygowana wartość napięcia
2
1
V
sk
U
U
R
0
U
Vb
U
0
R
1
R
2
R
V
V
R
b
1
b
V
R
R
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• Przykład 1d. U
0
=10 V, R
0
=100 Ohm, R
1
=1 MOhm,
R
2
=1 MOhm, R
V
=10 MOhm
1. Wartość rzeczywista napięcia
2. Wynik pierwszego pomiaru
3. Wynik drugiego pomiaru przy R
b
=R
v
(β=1)
V
4,99975
1
1
1
2
1
0
1
0
0
R
R
R
R
R
U
U
x
V
4,76166
1
1
1
1
2
1
0
1
0
0
V
V
R
R
R
R
R
R
U
U
V
4,54521
1
1
1
1
1
2
1
0
1
0
0
b
V
Vb
R
R
R
R
R
R
R
U
U
3.Korekcja wpływu rezystancji
wejściowej woltomierza
• Przykład 1d. U
0
=10 V, R
0
=100 Ohm, R
1
=1 MOhm,
R
2
=1 MOhm, R
V
=10 MOhm
4. Wartość współczynnika
5. Skorygowany wynik pomiaru
Co odpowiada rzeczywistej wartości napięcia
1,04762
V
4,54521
V
4,76166
Vb
V
U
U
V
4,99975
1,04762
2
V
4,76166
2
V
x
U
U
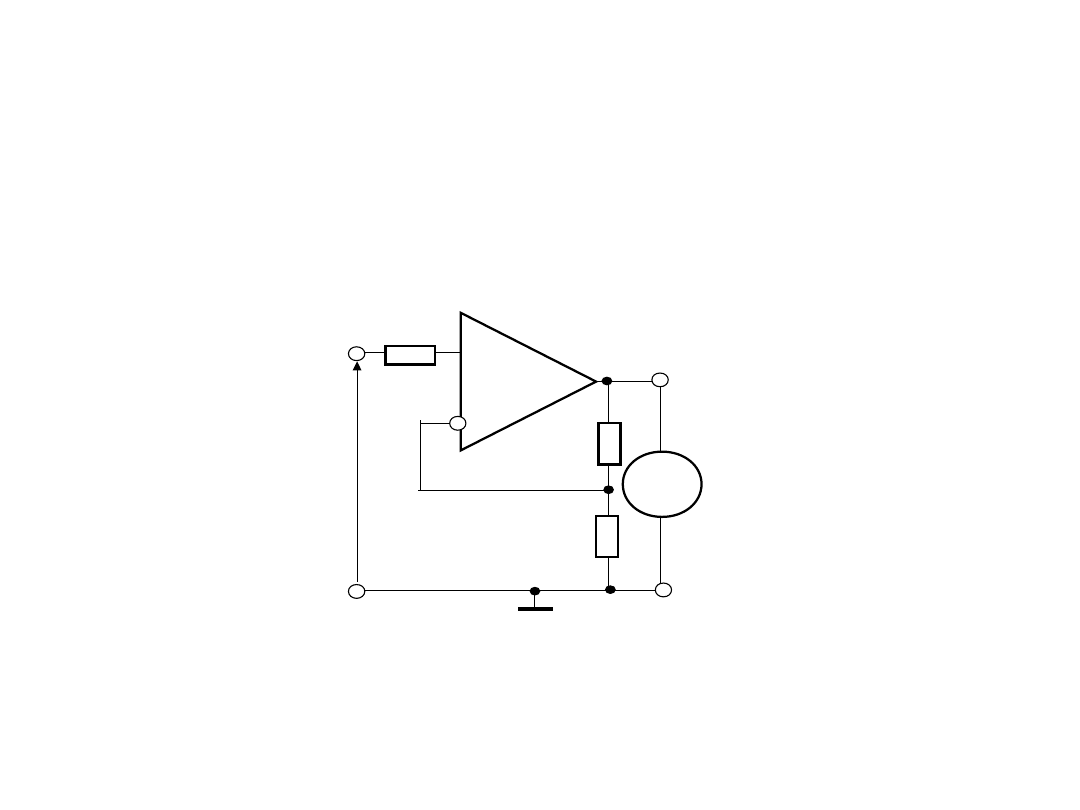
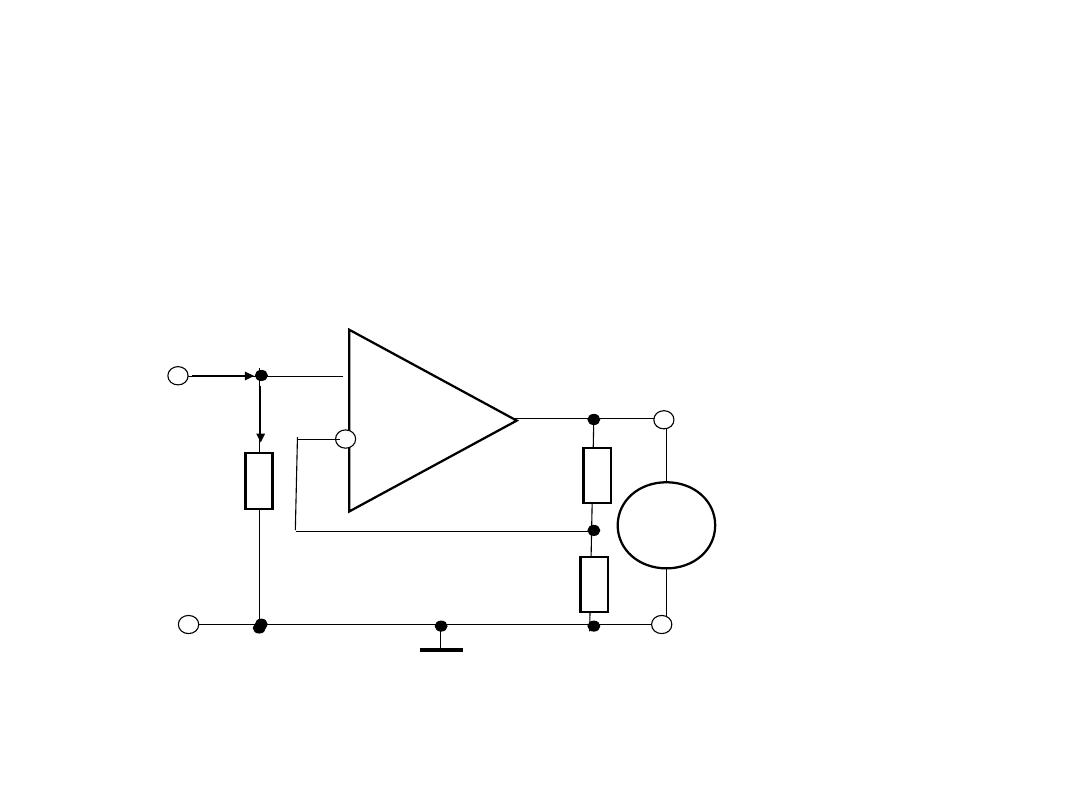
4.Układy wejściowe woltomierza
W celu
zapewnienia dużej rezystancji wejściowej na wejściu
woltomierza wykorzystuje wzmacniacz nieodwracający
,
zbudowany na wzmacniaczu operacyjnym (WO) ze sprężeniem
zwrotnym z dzielnikiem napięcia na rezystorach R
1
oraz R
2
.
Do wyjścia wzmacniacza jest podłączony przetwornik A/C (lub
analogowy woltomierz).
Równanie przetwarzania dla struktury bazowej:
U
v
=U
x
K
wu
,
gdzie K
wu
- współczynnik wzmocnienia napięcia
U
x
WO
U
wy
+
-
R
1
R
2
V
HI
R
3
LO
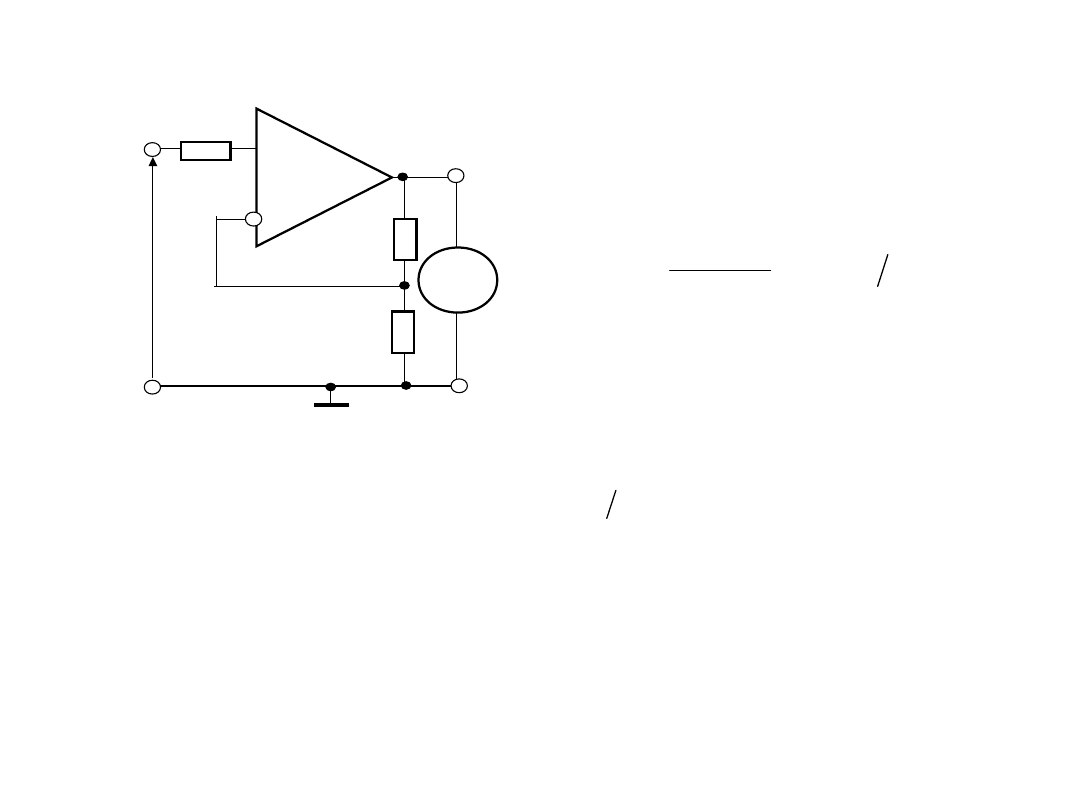
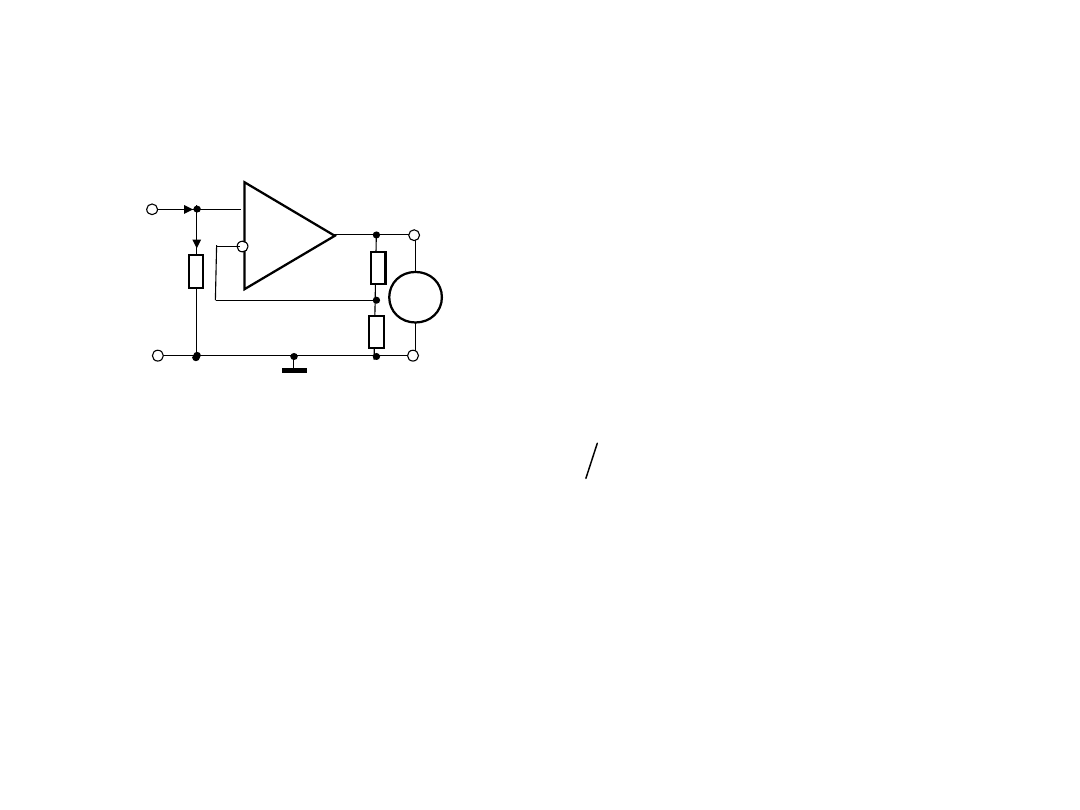
4.Układy wejściowe woltomierza
Rezystancja wejściowa woltomierza równa się rezystancji
wejściowej wzmacniacza:
gdzie R
we,WO
- jest rezystancją wejściową wzmacniacza
operacyjnego, A
0
- współczynnik wzmocnienia rozwartego WO
U
x
WO
U
wy
+
-
R
1
R
2
V
HI
R
3
LO
2
1
2
1
2
1
R
R
R
R
R
K
wu
w
WO
we
we
V
K
A
R
R
R
R
0
,
3
1
4.Układy wejściowe woltomierza
Wpływ zmian wejściowego napięcia przesuwu e
we
:
Wpływ zmian wejściowego prądu przesuwu Δi
we
:
Względny wpływ wartości współczynnika wzmocnienia WO A
0
:
Rezystancja wyjściowa:
Wymagania do WO:
• duża rezystancją wejściową wzmacniacza operacyjnego ,
• małe wartości wejściowego napięcia przesuwu oraz
• wejściowego prądu przesuwu,
• duża wartość współczynnika A
0
wzmocnienia WO
we
we
e
e
U
)
(
3
)
(
R
I
I
U
we
we
wu
I
K
A
A
0
0
1
1
)
(
wu
WO
wy
wy
K
A
R
R
0
,
1
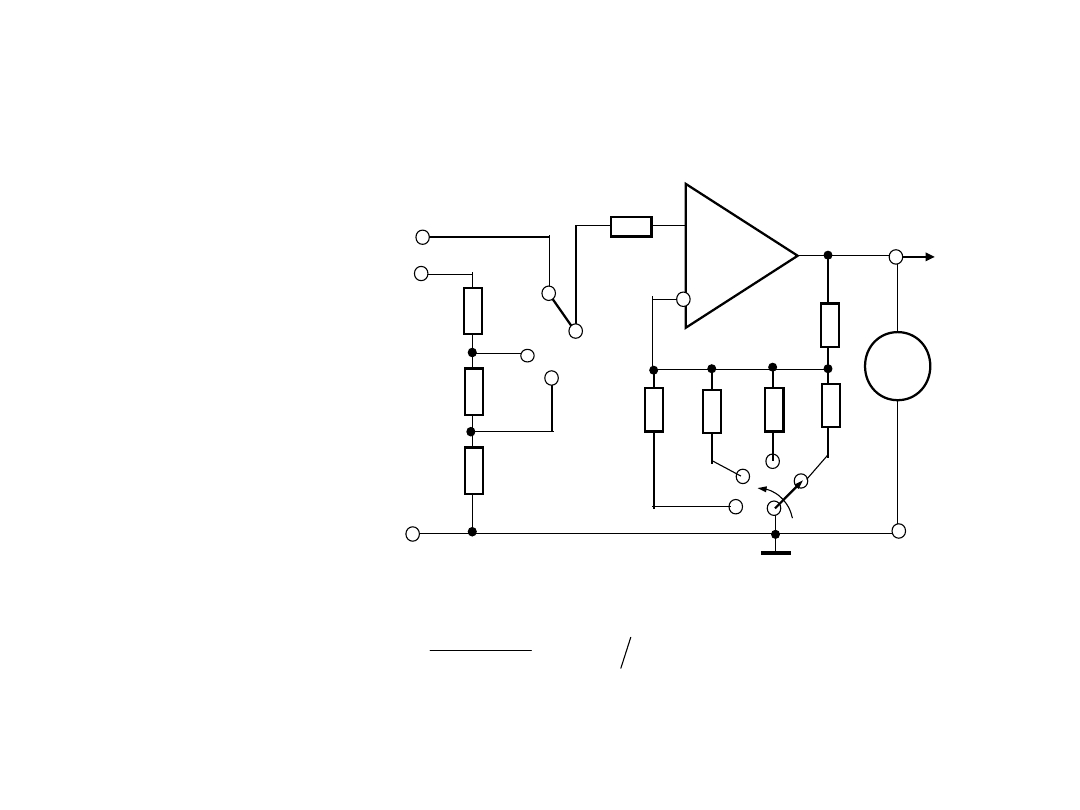
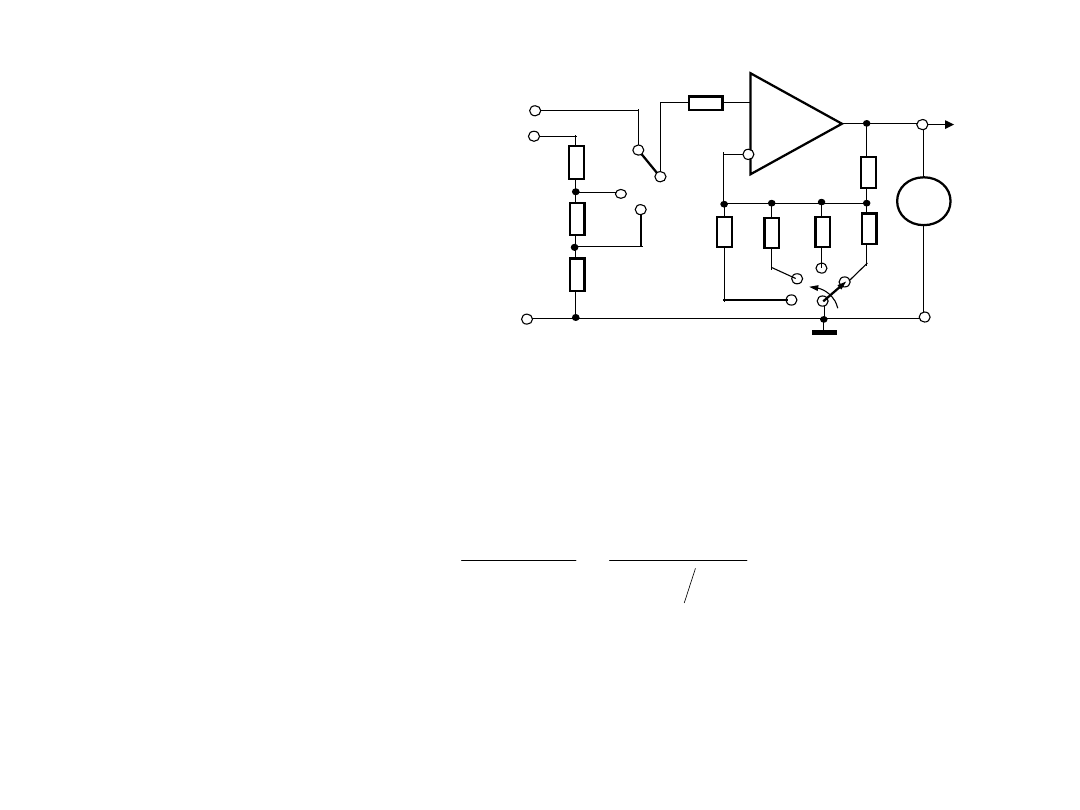
4.Układy wejściowe woltomierza
W celu zapewnienia rozszerzenia zakresów w stronę napięć
mniejszych (poniżej około 1 V) wykorzystuje kilku rezystorów
R
2j
w obwodzie sprężenia zwrotnego WO.
Wtedy współczynnik wzmocnienia równa się:
zwykle maksymalne wzmocnienie stanowi 10
3
-10
4
razy.
WO
U
wy
+
-
R
1
R
2,1
V
R
3
R
2,2
R
2,3
R
4,1
R
4,2
R
5
200V
20V
2V
200mV
20mV
2mV
LO
HI
2mV-2V
20V, 200V
(do A/C)
R
2,4
j
j
j
j
w
R
R
R
R
R
K
,
2
1
,
2
1
,
2
,
1
4.Układy wejściowe woltomierza
W celu zapewnienia rozszerzenia zakresów w stronę napięć
większych (ponad około 10 V) jak w DMM wykorzystuje się
dzielnik wejściowy
Równanie przetwarzania dla struktury na rys:
Uv=Ux
K
d,i
K
w,j
,
gdzie K
d,i
- współczynnik podziału napięcia wejściowego dzielnika
Rezystancja wejściowa woltomierza w tym przypadku równa się
rezystancji dzielnika Rd (przyjmując ze rezystancja wejściowa
wzmacniacza W0 jest w dużym stopniu większa od rezystancji
dzielnika):
WO
U
wy
+
-
R
1
R
2,1
V
R
3
R
2,2
R
2,3
R
4,1
R
4,2
R
5
200V
20V
2V
200mV
20mV
2mV
LO
HI
2mV-2V
20V, 200V
(do A/C)
R
2,4
i
i
i
i
d
R
R
R
R
R
K
,
4
5
5
,
4
,
4
,
1
1
d
V
R
R
R
R
R
...
2
,
4
1
,
4
5
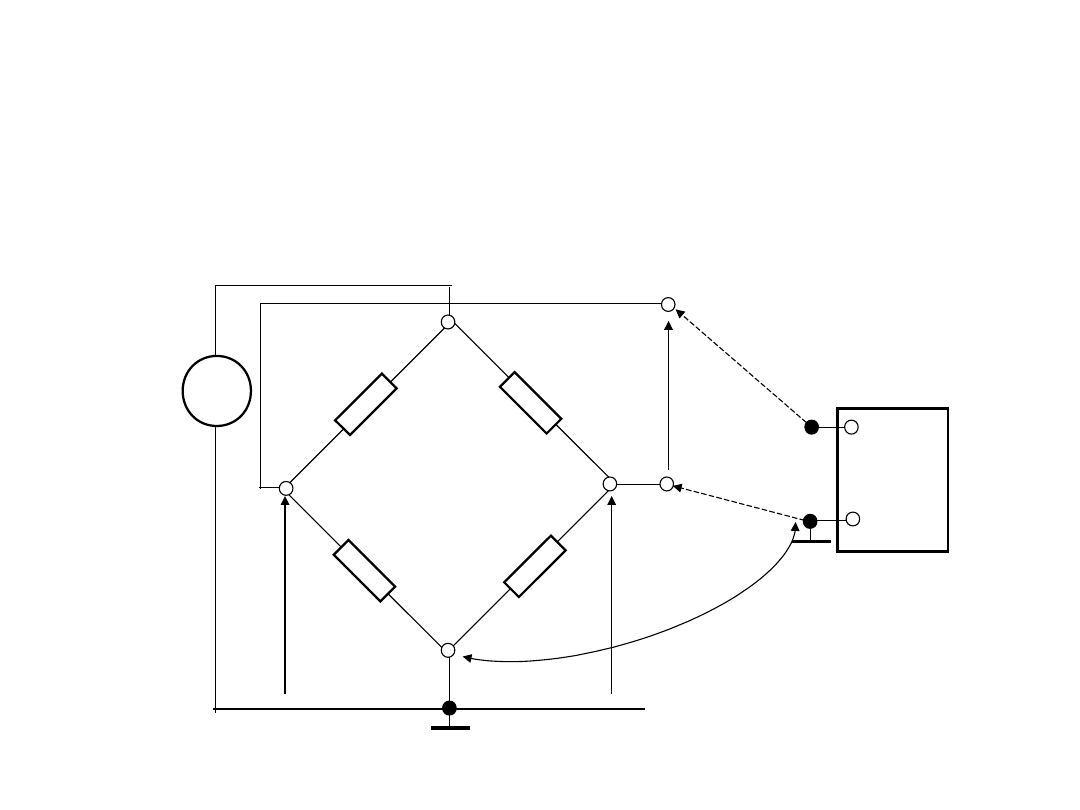
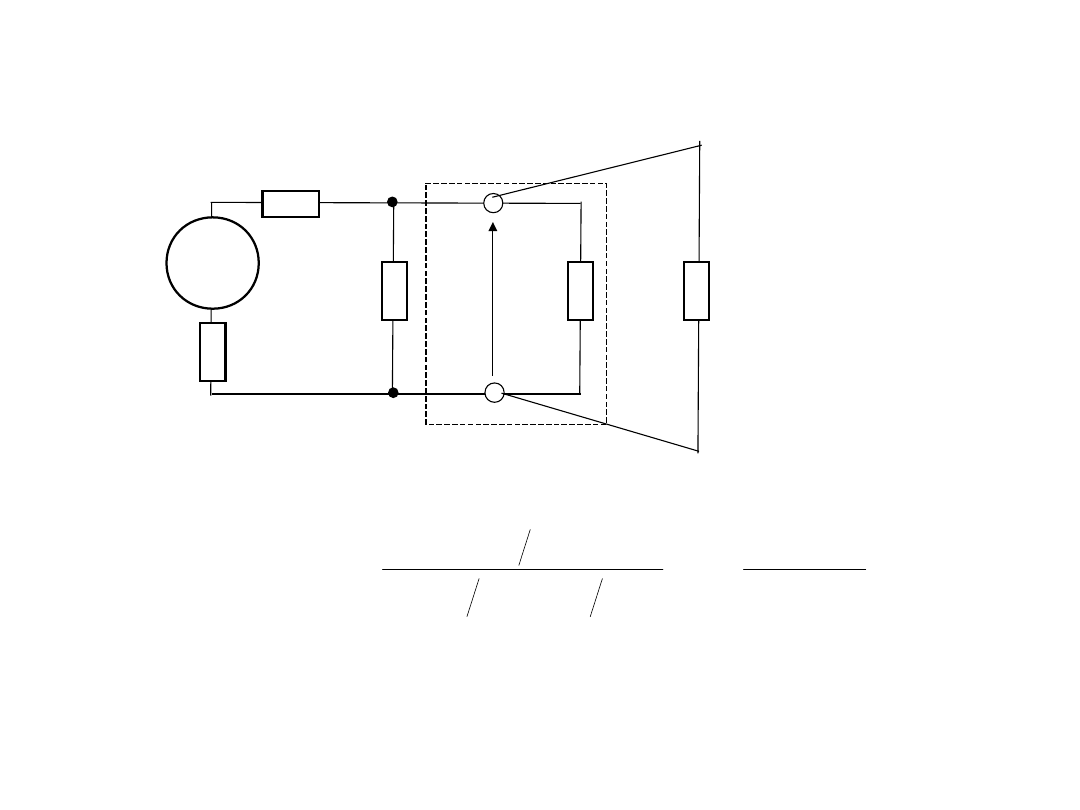
5. Układ wejściowy woltomierza ze
wzmacniaczem instrumentalnym.
Przy pomiarach napięć z obiektów, wyjścia którego są
odseparowani od masy wspólnej (ziemi), podłączenie tych
wyjść do wejść woltomierza z uziemionym wejściem „LO”
może powodować sytuację konfliktową.
E
R
1
R
4
R
3
R
2
U
x
=U
1
-U
2
U
2
U
1
„0(ź)
”
V
HI
LO
?
Konflikt!
„0(
V
)”
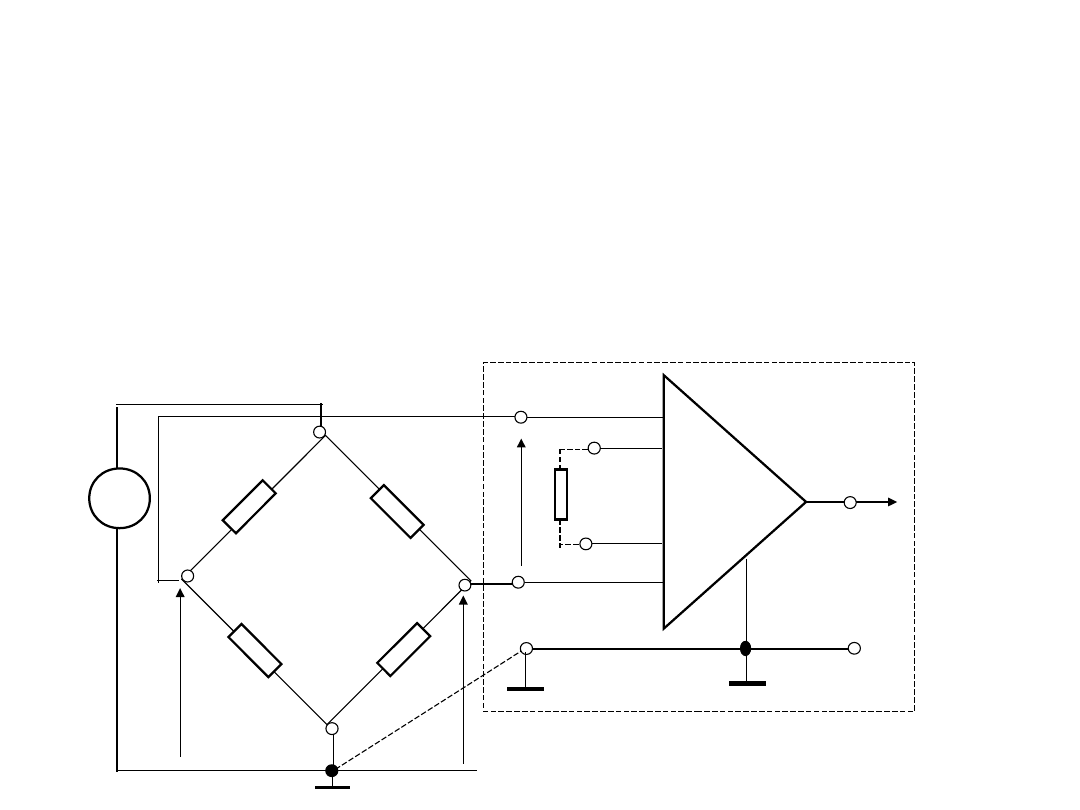
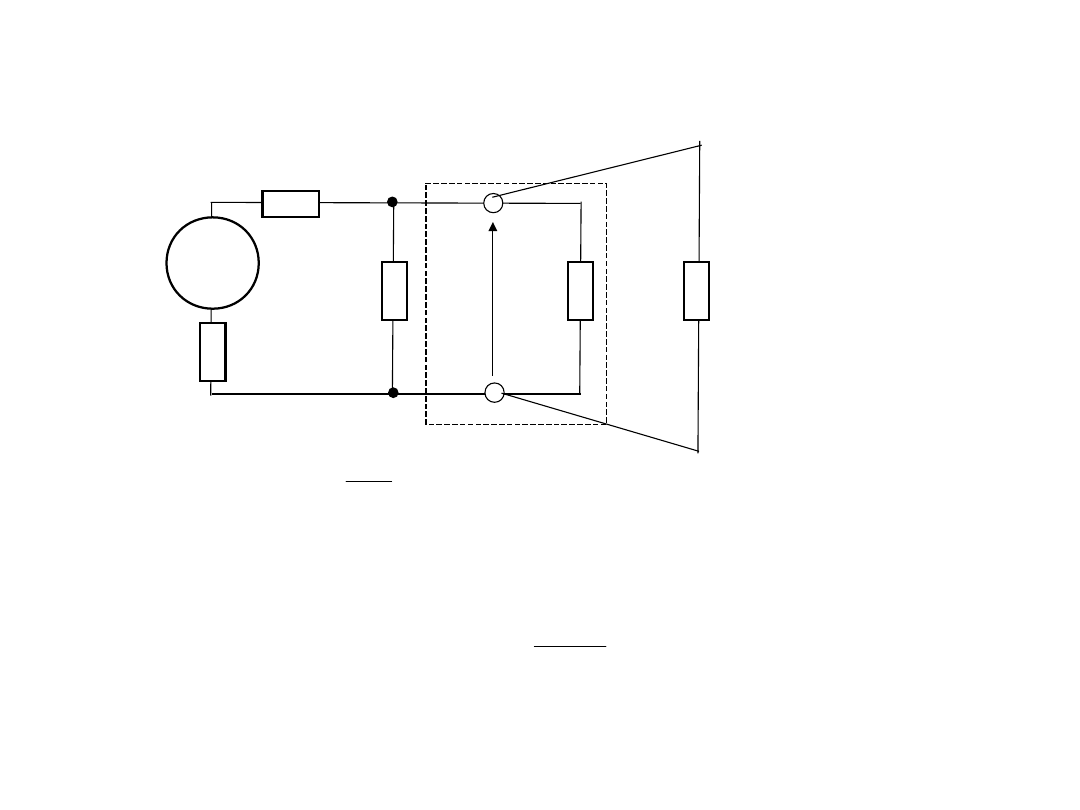
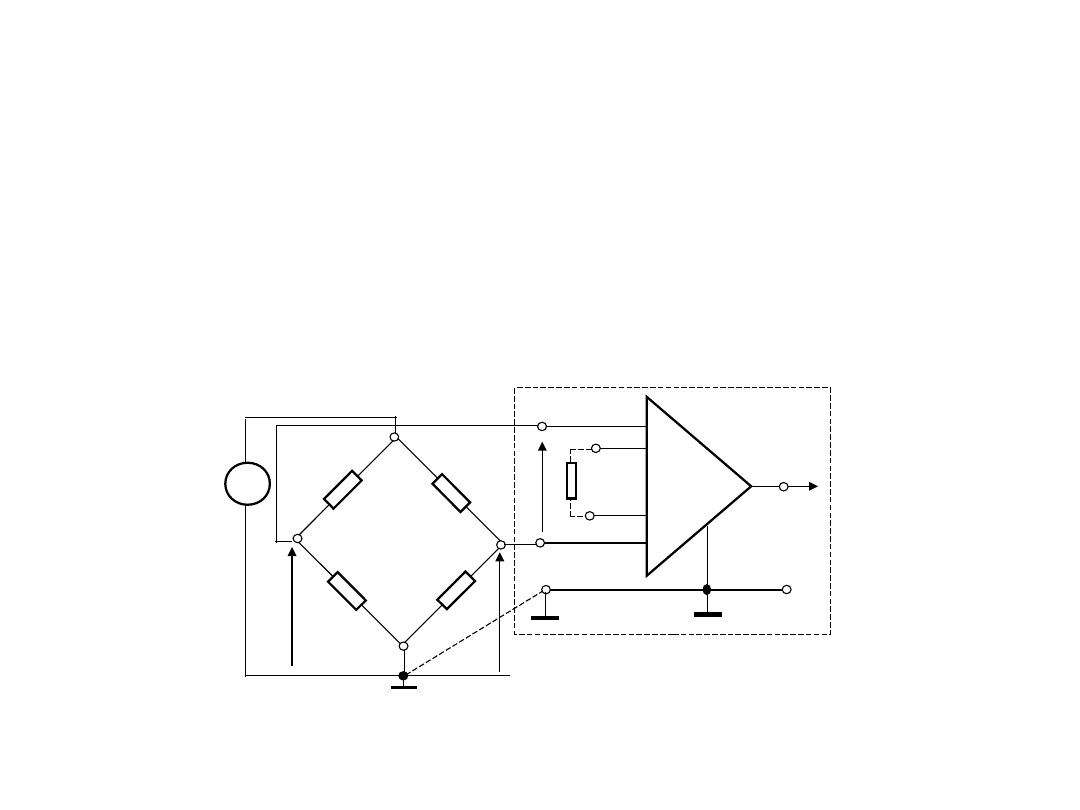
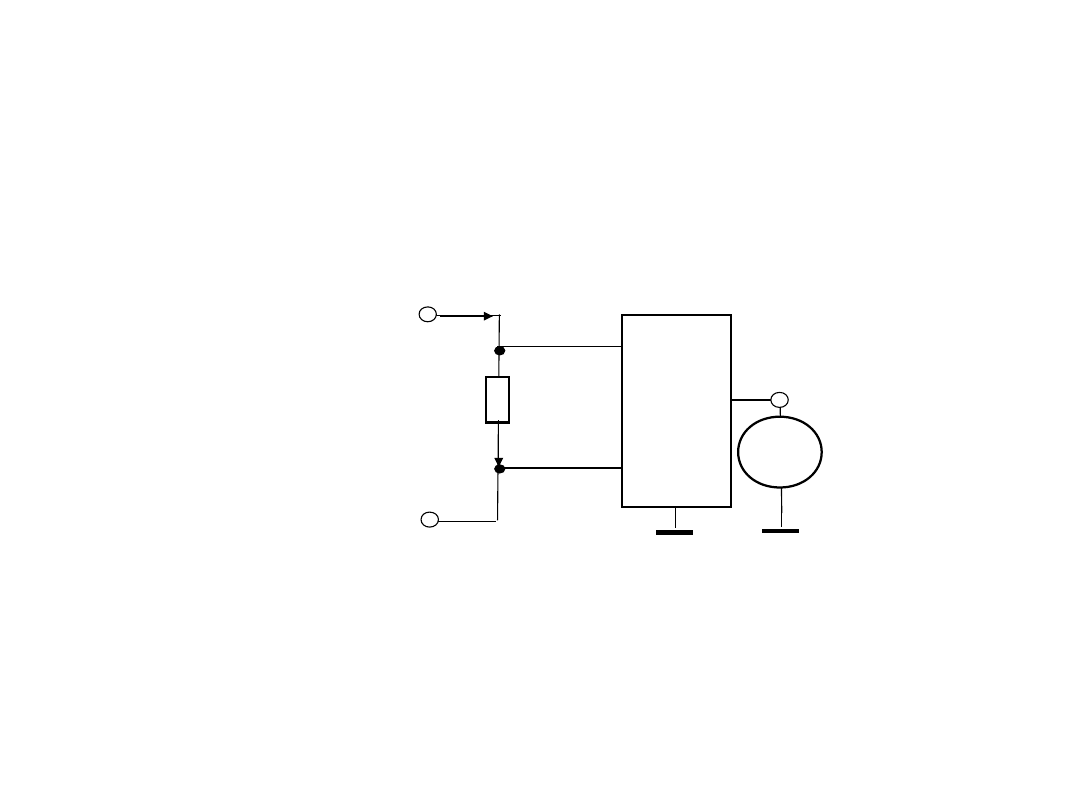
5. Układ wejściowy woltomierza ze
wzmacniaczem instrumentalnym.
W celu uniknięcia takiej sytuacji układ woltomierza powinien
mieć symetryczne (odseparowane od masy) wejścia. Taki
warunki mogą być spełnione przy wykorzystaniu wzmacniacza
instrumentalnego.
W takim układzie woltomierz jest wyposażony w trzy wejścia
(sygnałowe wysokie – „HI” i niskie „LO” oraz masę „0”).
Do sygnałowych wejść są dołączone punkty obwodu obiektu,
różnicę potencjałów należy zmierzyć. Wejście masy mogę być
podłączone do masy obiektu.
R
G
WI
-
+
HI
Do A/C
LO
0
Ref
U
x
=U
1
-
U
2
E
R
1
R
4
R
3
R
2
U
1
„0(ź)
”
U
2
5. Układ wejściowy woltomierza ze
wzmacniaczem instrumentalnym.
Równanie przetwarzania dla struktury woltomierza ze
wzmacniaczem instrumentalnym:
gdzie
K
g
=
K
WI
- współczynnik wzmocnienia wzmacniacza
instrumentalnego.
Rezystancja wejściowa takiego układu równa się rezystancji
wejściowej wzmacniacza instrumentalnego.
R
G
WI
-
+
HI
Do A/C
L
O
0
Ref
U
x
=U
1
-U
2
E
R
1
R
4
R
3
R
2
U
1
„0(ź)
”
U
2
WI
x
V
K
U
U
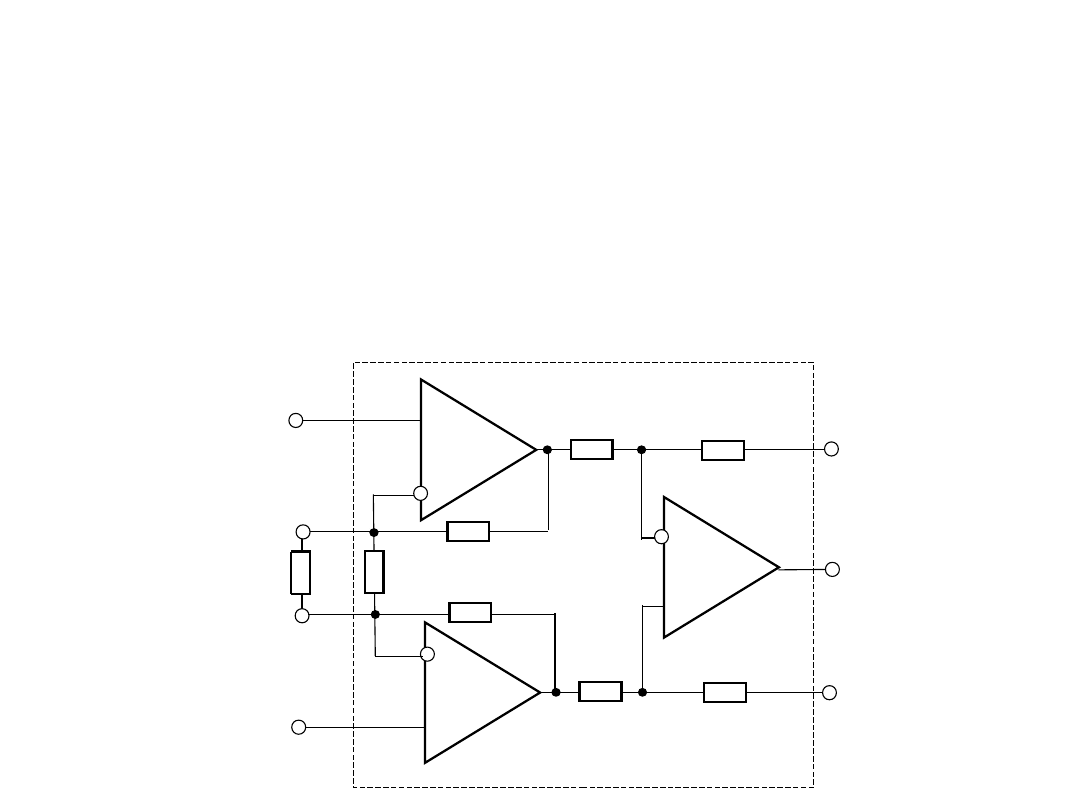
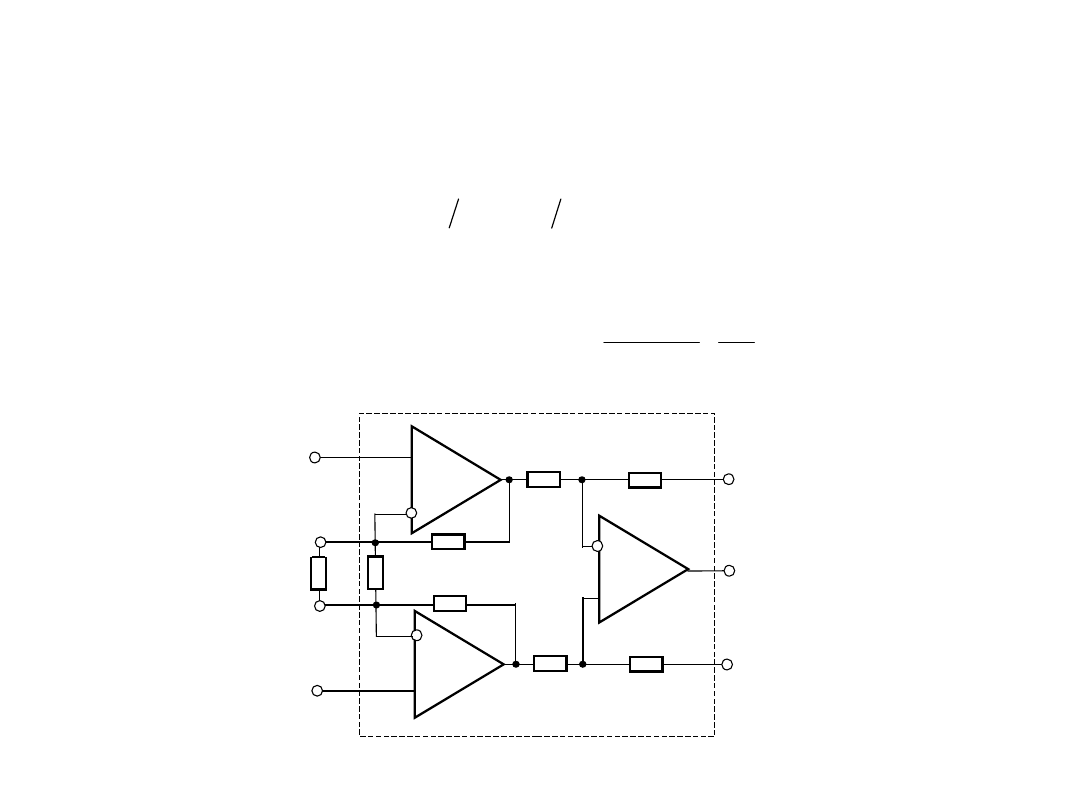
5. Układ wejściowy woltomierza ze
wzmacniaczem instrumentalnym.
Wzmacniacz instrumentalny jest zbudowany na podstawie kilku
wzmacniacze operacyjnych (W0) ze sprężeniem zwrotnym
utworzonych za pomocą rezystorów wewnętrznych, wartości
rezystancji których wyznaczają współczynnik wzmocnienia WI.
W jednym układzie scalonym może być kilku wzmacniacze
instrumentalnych. Typowy układ WI jest zbudowany na trzech
wzmacniaczach operacyjnych W0
1
, W0
2
oraz WO
3
.
V
in1
WO
1
+
-
R
6
V
in2
WO
2
R
5
R
7
R
3
R
4
R
1
R
2
WO
3
U
b
U
a
U
2
U
1
Feedback
V
o
V
ref
R
Go
+
+
-
-
5. Układ wejściowy woltomierza ze
wzmacniaczem instrumentalnym.
W razie spełnienia warunku dla wartości rezystancji rezystorów
napięcie wyjściowe ma wartość
2
3
4
1
2
K
R
R
R
R
V
in1
WO
1
+
-
R
6
V
in2
WO
2
R
5
R
7
R
3
R
4
R
1
R
2
WO
3
U
b
U
a
U
2
U
1
Feedbac
k
V
o
V
ref
R
Go
+
+
-
-
1
2
6
7
5
2
1
1
R
R
R
R
R
K
K
K
g
6. Współczynnik tłumienia wejściowego
napięcia wspólnego
Współczynnik tłumienia wejściowego napięcia wspólnego (synfazowego)
– CMMR (ang. Common Mode Rejection Ratio) –
stosunek napięcia wspólnego
U
cm
do wartości różnicowego napięcia
U
dif
,
które należy podać do wejść WI, żeby otrzymać taką sama wartość
napięcia wyjsciowego U
wy
CMMR= U
cm
/U
dif
= U
cm
/(U
wy
/K
g
)=K
g
(U
cm
/U
wy
)=K
g
/K
cm
K
cm
równa się stosunku napięcia wyjściowego
U
wy
do wartości
powodującego jego napięcia wejściowego wspólnego
U
cm
=U
we1
=U
we2
lub
U
cm
=(U
we1
+U
we2
)/2
(jednakowego na obydwu wejściach tzn. przy zerowym napięciu
różnicowym
U
dif
=U
we1
-U
we2
=0
CMMR zwykle jest wyrażany w decybeli
G
we
s
o
s
s
G
K
U
V
U
K
K
CMMR
)
(
lg
20
lg
20
,

6. Współczynnik tłumienia wejściowego
napięcia wspólnego
Przy wartości napięcia wspólnego
Us,we
Ograniczenie wartości współczynnika CMRR powoduje powstanie
błędu
Które odbierane jest jako niekorzystne napięcie różnicowe
wejściowe
Przykładowo, jeżeli CMRR=100 dB, oraz Uwe1=Uwe2=10 V
wtedy odbierane niekorzystne napięcie różnicowe wejściowe (błąd
wejściowy) wynosi
Jak widać, wpływ ograniczenia wartości CMRR przy niezerowej
wartości napięcia wejściowego wspólnego może być dużym.
20
10
CMRR
cm
r
U
U
mkV
mV
,
V
V
V
V
U
CMRR
cm
r
100
1
0
10
10
10
10
10
10
4
5
20
100
20

POMIAR PRĄDU.
SCHEMATY UKŁADÓW
WEJŚCIOWYCH
ELEKTRONICZNYCH
AMPEROMIERZE
PRĄDU STAŁEGO

Plan wykładu
1. Wymagania do amperomierze
2. Układy wejściowe
amperomierze.
1. Wymagania do
amperomierze
Ogólnym wymaganiem do amperomierze jest zapewnienie małej
rezystancji wejściowej , ponieważ ona decyduje o błędzie
metodycznym pomiaru prądu oraz o spadku napięcia
pomiarowego na wejściu amperomierza (tzw.
Burden
Volage
).
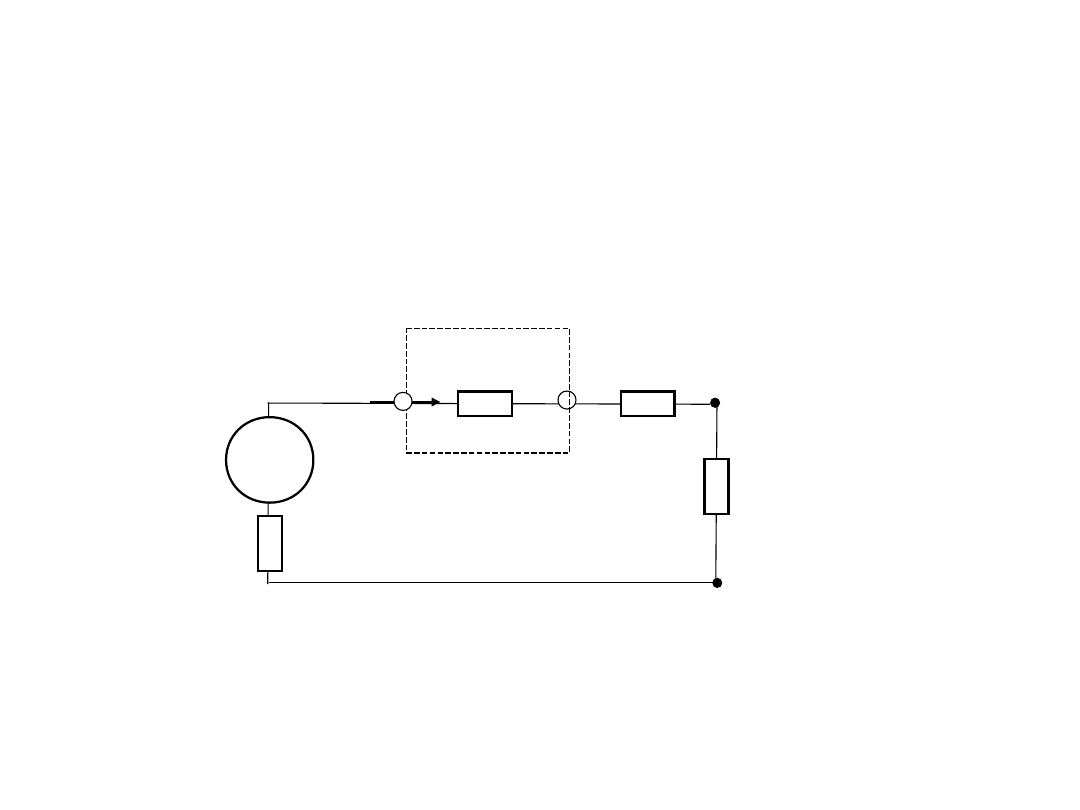
Na rys. pokazano obwód elektryczny, w którym należy zmierzyć
wartość prądu Ix.
Do wprowadzenia amperomierza wartość tego prądu wynosi
R
0
I
x
U
0
R
1
I
A
R
0
U
0
R
A
R
1
A
U
A
01
0
1
0
0
R
U
R
R
U
I
x
1. Wymagania do
amperomierze
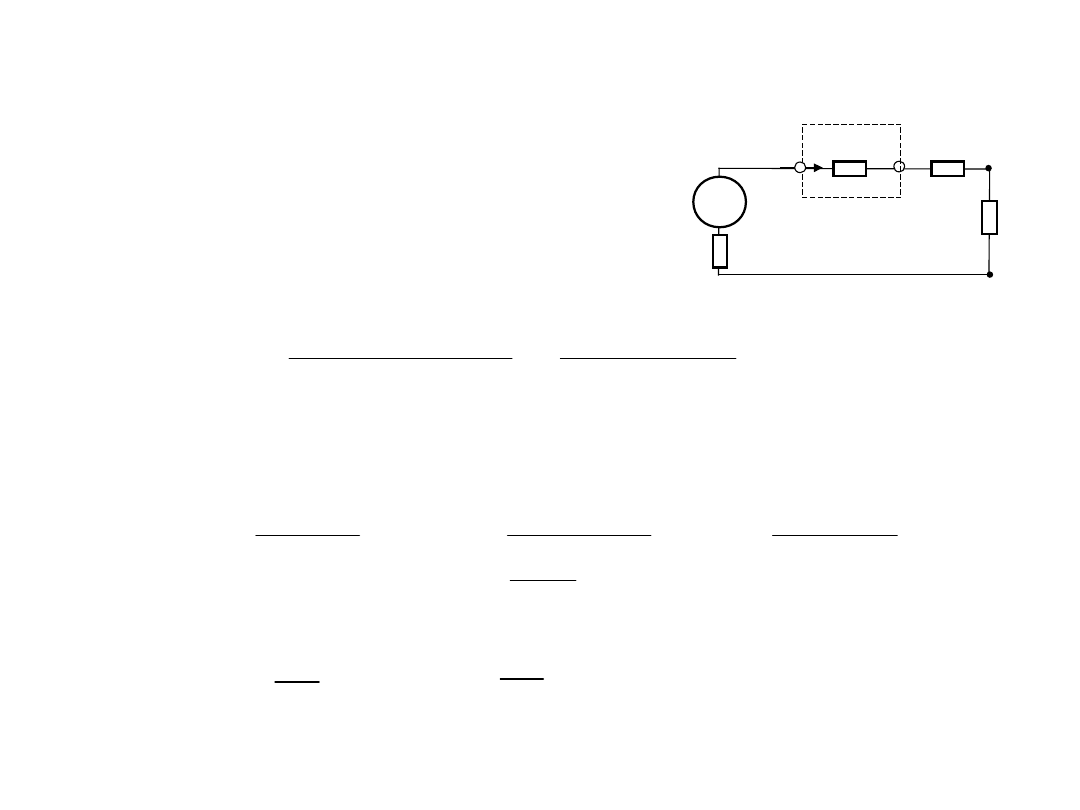
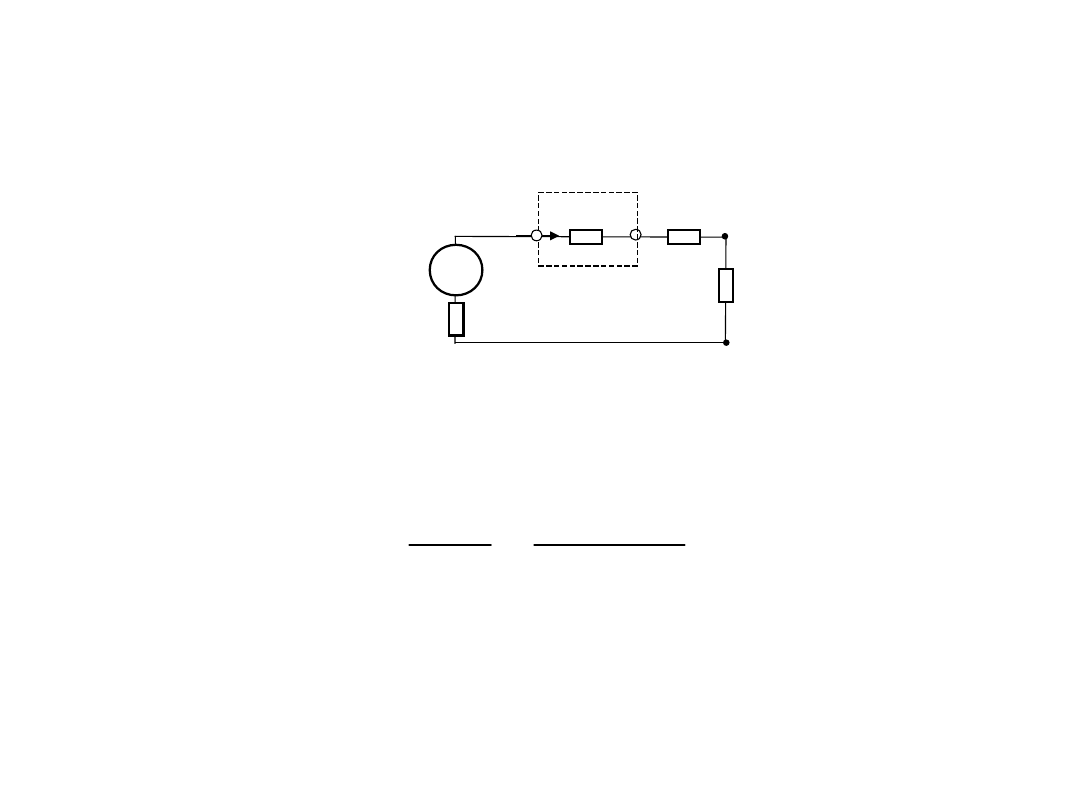
Po szeregowym włączeniu amperomierza z rezystancją
wejściowej RA zmieni się ekwiwalentna rezystancja obwodu,
w wyniku czego zmieni się prąd mierzony (wskazanie
amperomierza)
Zmniejszenie prądu pomiarowego wynosi
Względny błąd
R
0
I
x
U
0
R
1
I
A
R
0
U
0
R
A
R
1
A
U
A
A
x
A
R
R
U
I
I
01
0
x
A
A
x
A
A
A
A
x
A
R
I
R
R
R
I
U
R
I
R
R
I
I
I
I
A
01
0
01
A
A
A
A
A
x
R
R
R
R
R
U
U
U
R
I
I
I
A
A
01
0
0
)
(

1. Wymagania do
amperomierze
Przykład 1a
. Przy R0=100 Ohm, R1=1 kOhm oraz RA=1 Ohm,
U0=1 V otrzymuje się:
Wskazanie mikroamperomierza:
Błąd metodyczny względny:
Przykład 1b
. Jeżeli wartości rezystancji obiektu badanego będą o
10 razy mniejsza R1=100 Ohm , otrzymuje się:
wskazanie amperomierza ;
błąd metodyczny względny:
mA
kOhm
Ohm
V
R
R
U
I
x
90909
,
0
1
100
1
1
0
0
mA
Ohm
kOhm
Ohm
V
R
R
R
U
I
A
A
90827
,
0
1
1
100
1
1
0
0
%
091
,
0
%
100
90909
,
0
90909
,
0
90827
,
0
mA
mA
mA
I
I
I
x
x
A
R
v
mA
I
x
5
mA
I
A
4.97512
%
5
,
0
A
R
1. Wymagania do
amperomierze
Przykład 1c
. Przy R0=10 Ohm, R1=10 Ohm oraz RA=1 Ohm,
U0=1 V otrzymuje się:
Wskazanie miliamperomierza:
Błąd metodyczny względny:
mA
Ohm
Ohm
V
R
R
U
I
x
00
,
50
10
10
1
1
0
0
mA
Ohm
Ohm
Ohm
V
R
R
R
U
I
A
A
47,619
1
10
10
1
1
0
0
%
8
,
4
%
100
00
,
50
00
,
50
47,619
mA
mA
mA
I
I
I
x
x
A
R
v
1. Wymagania do
amperomierze
Dla zmniejszenia tego błędu należy wykorzystać miliamperomierz
z mniejszą rezystancję wejściową, na przykład RA=0,01 Ohm
lub jeszcze mniejszej, wtedy w ostatnim przypadku błąd
metodyczny względny:
%
005
,
0
A
R

1. Wymagania do
amperomierze
Otóż wartość błędu metodycznego, spowodowanego ograniczonej
wartością rezystancji wejściowej amperomierza zależy od
stosunku rezystancji wejściowej amperomierza RA i
ekwiwalentnej rezystancji obwodu ze strony pomiędzy
punktami włączenia amperomierza
Zmniejszenie rezystancji wejściowej amperomierza R
A
zapewnia
zmniejszenie błędu metodycznego.
Z innej strony, wartość błędu metodycznego wyznacza się
stosunkiem spadku napięcia na amperomierze (Burden
Volage) do napięcia obwodu.
Napięcie na amperomierze wynosi
jego wartość powinna być ograniczona.
A
A
A
R
I
U
A
A
x
R
R
R
R
R
I
I
A
A
01
)
(
0
0
)
(
U
U
U
R
I
I
I
A
A
A
x
R
R
A
A
Korekcja błędu od wpływu
rezystancji amperomierza R
A
.
Ze wzoru błędu
wynika, że skorygowana wartość prądu
1
0
R
R
R
I
I
I
I
A
A
x
A
R
A
1
0
1
R
R
R
I
I
A
A
x
Korekcja błędu od wpływu
rezystancji amperomierza R
A
.
Wpływ rezystancji amperomierza R
A
na wynik pomiaru prądu
może być skorygowany przez dodatkowy pomiar prądu z
włączeniem dodatkowej rezystancji R
d
o znanej wartości,
na
przykład taki samy amperomierz: R
d
=R
A
.
I
A2
R
0
U
0
R
A
R
1
A
R
d
Korekcja błędu od wpływu
rezystancji amperomierza R
A
.
Wtedy wynik pomiaru prądu w drugim pomiarze
Z wartości wyników pomiaru I
A
oraz I
A2
można wyznaczyć wartość
I
x
1
2
A
A
I
I
a
I
A2
R
0
U
0
R
A
R
1
A
R
d
A
d
A
A
R
R
R
U
R
R
R
R
U
I
2
1
0
0
1
0
0
2
a
I
R
a
R
R
I
R
R
R
I
I
A
A
d
A
A
A
A
x
1
1
1
1
1
0
A
d
R
R
Korekcja błędu od wpływu
rezystancji amperomierza R
A
.
Przy R
d
=R
A
Dlatego skorygowana wartość prądu
A
A
A
A
A
x
I
I
I
I
a
I
I
2
2
2
2
I
A2
R
0
U
0
R
A
R
1
A
R
d
1
Korekcja błędu od wpływu
rezystancji amperomierza R
A
.
Przykład 1d. U0=10 V, R0+R1=10 Ohm, RA=1 Ohm.
Wartość rzeczywista prądu
Wynik pierwszego pomiaru
Wynik drugiego pomiaru
Wartość współczynnika
Skorygowana wartość prądu
Co odpowiada rzeczywistej wartości prądu.
A
Ohm
V
R
R
U
I
x
000
,
1
10
10
1
0
0
A
Ohm
Ohm
V
R
R
R
U
I
A
A
909091
,
0
1
10
10
1
0
0
A
Ohm
Ohm
Ohm
V
R
R
R
R
U
I
A
A
A
8333333
,
0
1
1
10
10
1
0
0
2
0909091
,
1
833333
,
0
909091
,
0
2
A
A
I
I
a
A
a
I
R
R
U
I
A
x
000
,
1
0909091
,
1
2
909091
,
0
2
1
0
0
2. Układy wejściowy
amperomierze
2.1. Układy wejściowe amperomierza z bocznikiem
Dla pomiarów prądów o dużej wartości (od kilku miliamperów i
wyżej) wykorzystuje się układ pomiarowy amperomierza z
bocznikiem na wejściu
WO
-
I
x
R
b
I
x
U
v
=Ix
R
b
K
wu
R
1
R
2
V
+
2. Układy wejściowy
amperomierze
2.1. Układy wejściowe amperomierza z bocznikiem
Dla takiego układu napięcie wyjściowe wynosi
R
b
- jest rezystancją bocznika, K
wu
- jest współczynnikiem
wzmocnienia wzmacniacza
WO
-
I
x
R
b
I
x
U
v
=Ix
R
b
K
wu
R
1
R
2
V
+
wu
b
x
b
x
wy
v
K
R
I
R
R
R
I
U
U
2
1
1
2. Układy wejściowy
amperomierze
2.1. Układ wejściowy amperomierza z bocznikiem
Lepsze charakterystyki można uzyskać stosując wzmacniacz
instrumentalny (WI), zwłaszcza w przypadkach kiedy obiekt
mierzony jest odseparowany od masy wspólnej.
Dla takiego układu napięcie wyjściowe wynosi
Kwi- jest współczynnikiem wzmocnienia WI
I
x
R
b
I
x
U
v
=Ix
R
b
K
wi
V
WI
K
wi
wi
b
x
wy
v
K
R
I
U
U

2. Układy wejściowy
amperomierze
2.1. Układy wejściowe amperomierza z bocznikiem
Dla takich układów wejściowych:
Rezystancja wejściowa amperomierza :
R
A
=Rb
Wartość napięcia na amperomierze: U
A
=I
x
·R
b
Dokładność takiej struktury amperomierza wyznacza się
dokładnością:
•
bocznika - błąd δ
b
;
•
wzmacniacza - błąd δ
w
oraz ;
•
przetwornika analogowo-cyfrowego (na wyjściu) – błąd δ
A/C
:
δ
A
=δ
b
+
δ
W
+
δ
A/C
2. Układy wejściowy
amperomierze
2.1. Układ wejściowy amperomierza z bocznikiem
Przy ograniczeniu wartości współczynnika wzmocnienia na
poziomie K
w
=10
3
-10
4
, oraz napięciu wyjściowym około
U
wy
=1V, wartość spadku napięcia na amperomierze wynosi
około
Wtedy wartość rezystancji bocznika równa się:
Przykład 2
. Przy zakresach prądu mierzonego I
x
od 1mA do 1 A
oraz K
w
=10
4
wartości rezystancji bocznika równają się
mV
V
K
U
U
w
wy
A
)
1
1
,
0
(
10
10
1
4
3
x
x
A
A
b
I
mV
I
U
R
R
)
1
1
,
0
(
Ohm
mOhm
A
mA
mV
R
R
A
b
1
,
0
01
,
0
10
1
1
,
0
2. Układy wejściowy
amperomierze
2.2. Bazowa konfiguracja układu wejściowego
mikroamperomierze z przetwarzaniem
bezpośrednim
Do pomiarów prądów, których wartości są z zakresie
mikroamperów i niżej, wykorzystują się układy z
bezpośrednim przetwarzaniem prądu.
I
x
WO
-
+
V
R
F
I
x
U
wy
=-Ix
R
F
LO
HI
I
x
WO
-
+
A
HI
I
A
=I
x
LO
2. Układy wejściowy
amperomierze
2.2. Bazowa konfiguracja układu wejściowego
mikroamperomierze z przetwarzaniem
bezpośrednim
W układzie z przetwarzaniem bezpośrednim prądu napięcie
wyjściowe równa się:
gdzie R
F
- rezystancja sprężenia zwrotnego.
I
x
WO
-
+
V
R
F
I
x
U
wy
=-Ix
R
F
LO
HI
I
x
WO
-
+
A
HI
I
A
=I
x
LO
F
x
wy
v
R
I
U
U
2. Układy wejściowy
amperomierze
2.2. Bazowa konfiguracja układu wejściowego
mikroamperomierze z przetwarzaniem
bezpośrednim
Spadek napięcia na amperomierze
:
Otóż w pierwszym przybliżeniu rezystancja wejściowa
mikroamperomierza:
I
x
WO
-
+
V
R
F
I
x
U
wy
=-Ix
R
F
LO
HI
I
x
WO
-
+
A
HI
I
A
=I
x
LO
WO
F
x
wy
A
A
R
I
A
U
U
0
0
A
R
I
U
R
F
x
A
A
2. Układy wejściowy
amperomierze
2.2. Bazowa konfiguracja układu wejściowego
mikroamperomierze z przetwarzaniem bezpośrednim
Przykład 3
. Jeżeli Ix=1 µA i na wyjściu przetwornika chcemy
otrzymać Uwy=1 V wtedy wartość rezystancji sprężenia
zwrotnego :
Przy wzmocnienie WO A0=10
5
-10
6
wartość rezystancji wejściowej
równa się:
przy tym spadek napięcia na amperomierzu równa się:
I
x
WO
-
+
V
R
F
I
x
U
wy
=-Ix
R
F
LO
HI
I
x
WO
-
+
A
HI
I
A
=I
x
LO
MOhm
A
V
I
U
R
x
wy
F
1
1
1
Ohm
MOhm
R
A
)
10
1
(
10
10
1
6
5
mkV
A
U
I
R
U
wy
x
A
A
)
10
1
(
0
2. Układy wejściowy
amperomierze
2.3. Bazowa konfiguracja układu wejściowego nano – i
pikoamperomierze
Jeżeli zakres pomiaru prądu ma być
1 nA
wtedy wartość
rezystancji sprężenia zwrotnego ma być równą:
a przy zakresie pomiaru prądu 10 pA wartość rezystancji
sprężenia zwrotnego ma być 100 razy większą
Rezystory z takimi wartościami rezystancji nie mogą być
wykorzystywane w precyzyjnych obwodach pomiarowych,
ponieważ te wartości są porównywalne są do wartości
rezystancji izolacji płytek, na których oni są umocowani.
GOhm
nA
V
I
U
R
x
wy
F
1
1
1
GOhm
pA
V
I
U
R
x
wy
F
100
10
1
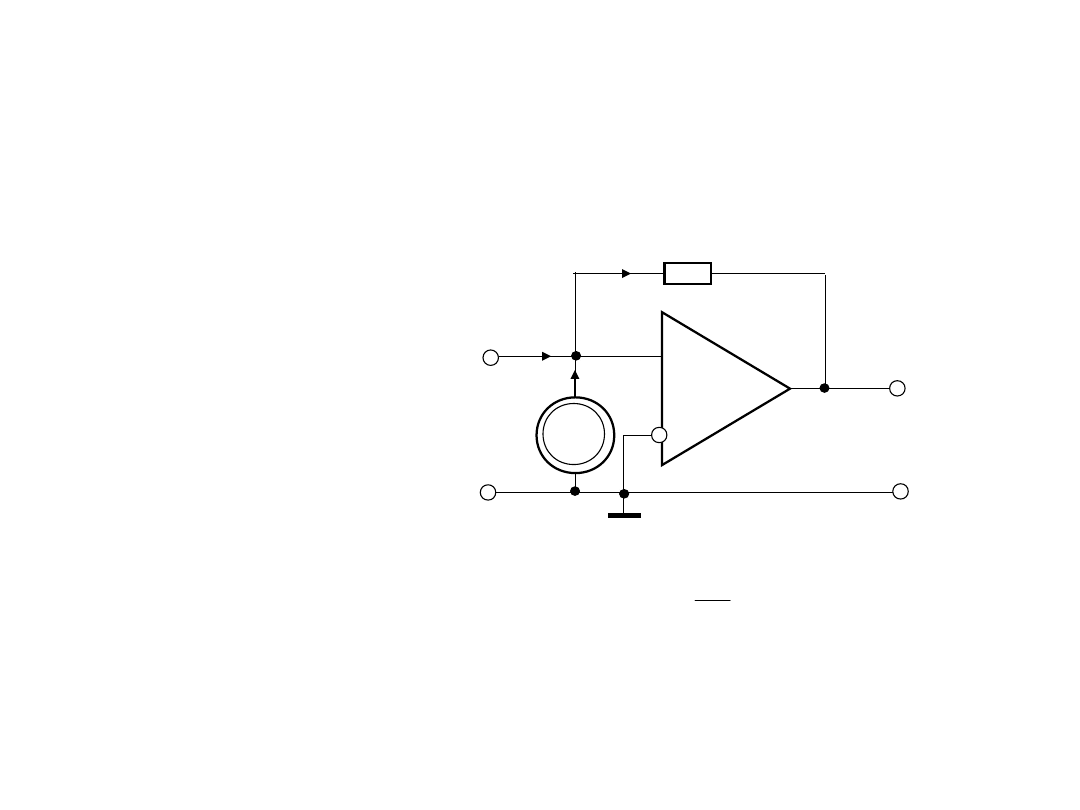
2. Układy wejściowy
amperomierze
2.3. Bazowa konfiguracja układu wejściowego nano – i
pikoamperomierze
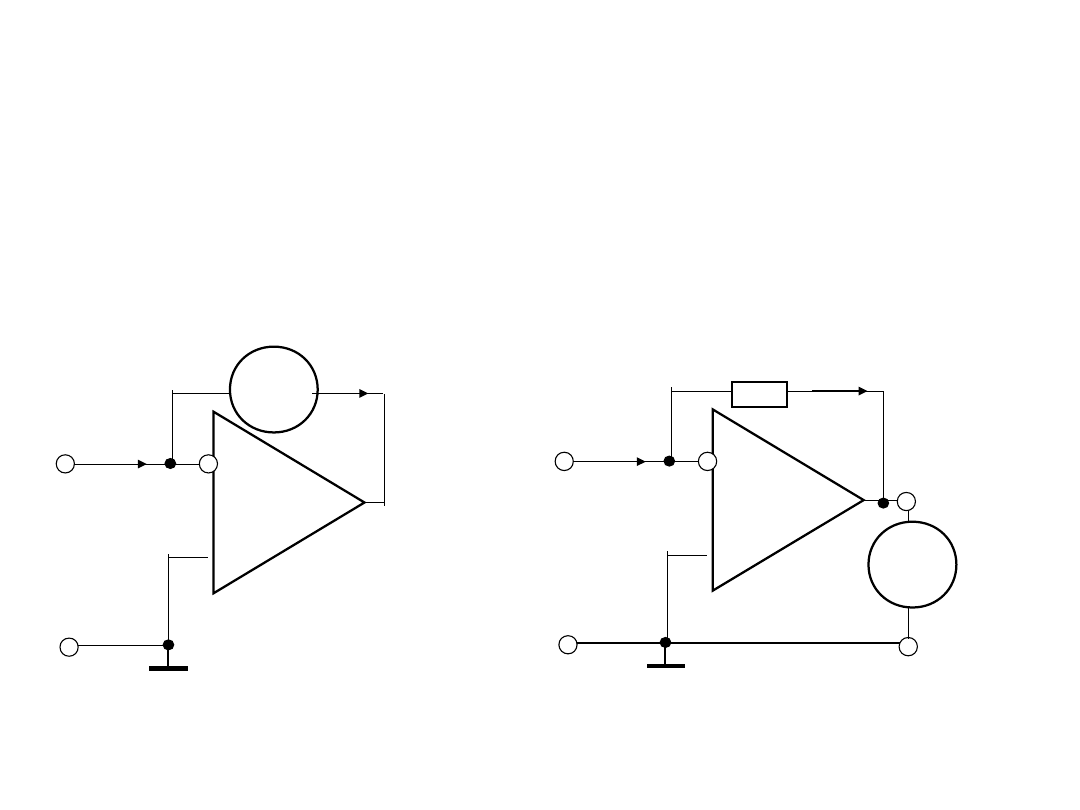
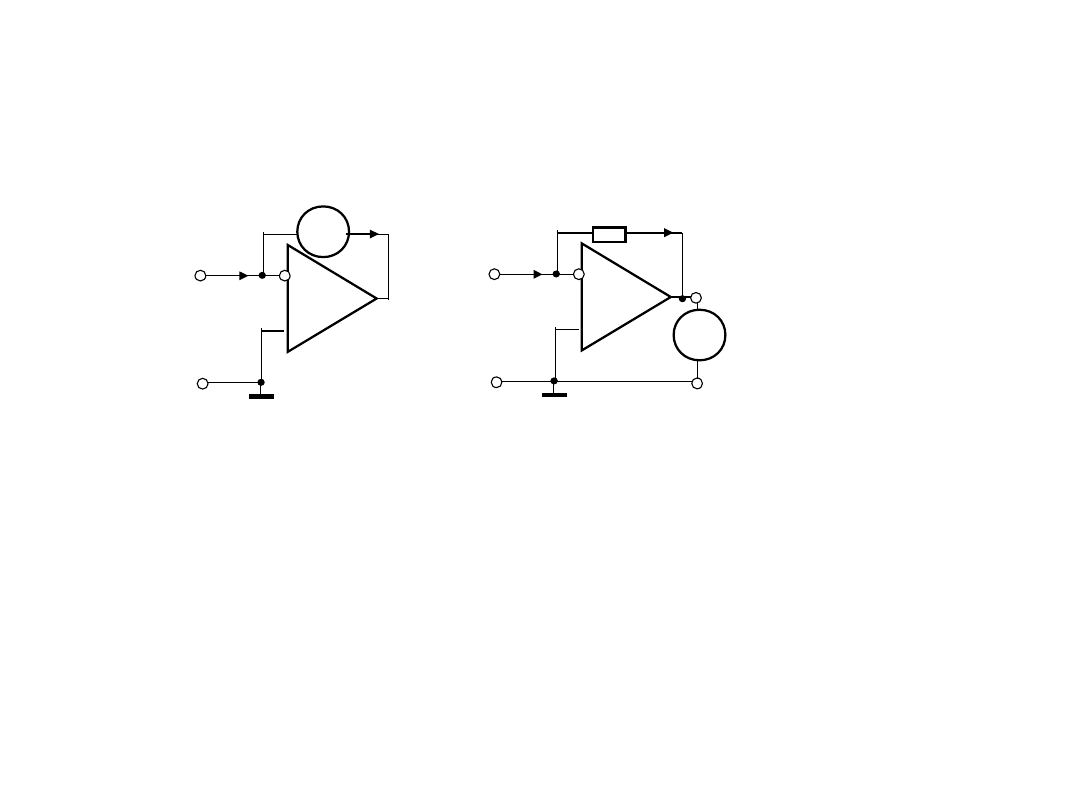
Ten problem jest usunięty poprzez wykorzystania właściwości
„wzmacniania” rezystancji obwodu gwiazdowego.
W tym obwodzie odbywa się przetwarzanie prąd-napięcie (R
F
) z
następnym wzmocnieniem napięcia (rezystory R
1
oraz R
2
).
WO
I
x
-
R
F
I
x
U
wy
=-I
x
R
F
K
i
R
1
R
2
V
+
2. Układy wejściowy
amperomierze
2.3. Bazowa konfiguracja układu wejściowego nano – i
pikoamperomierze
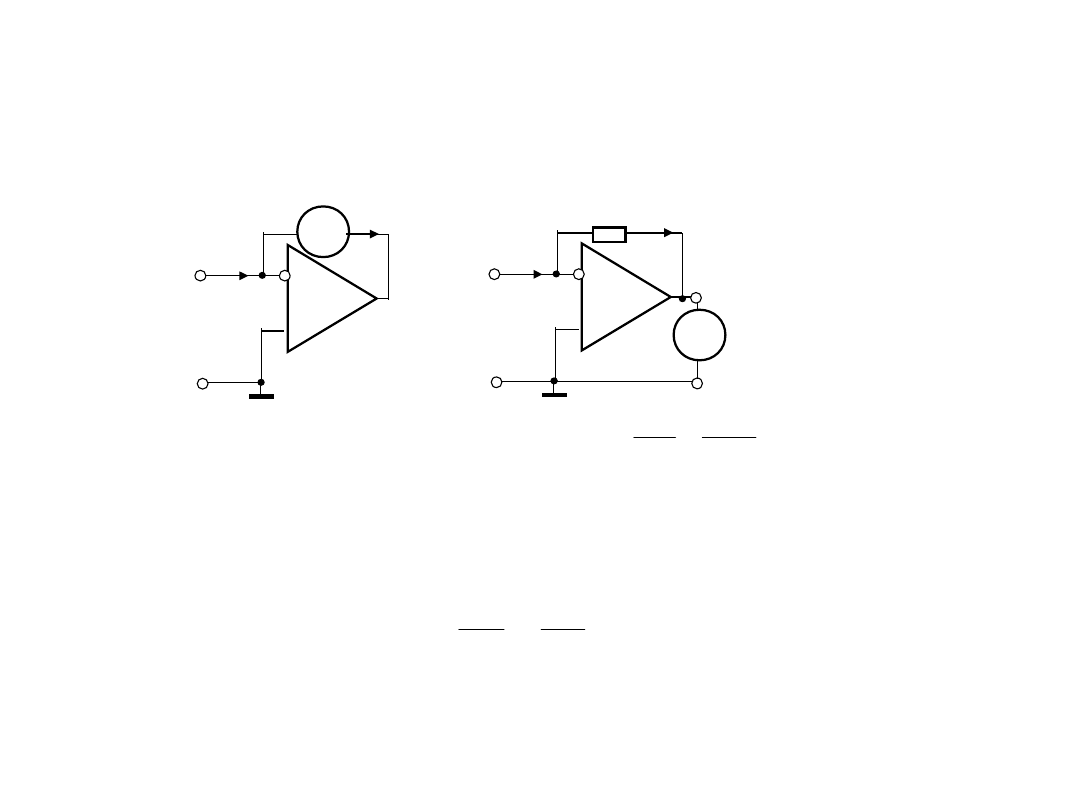
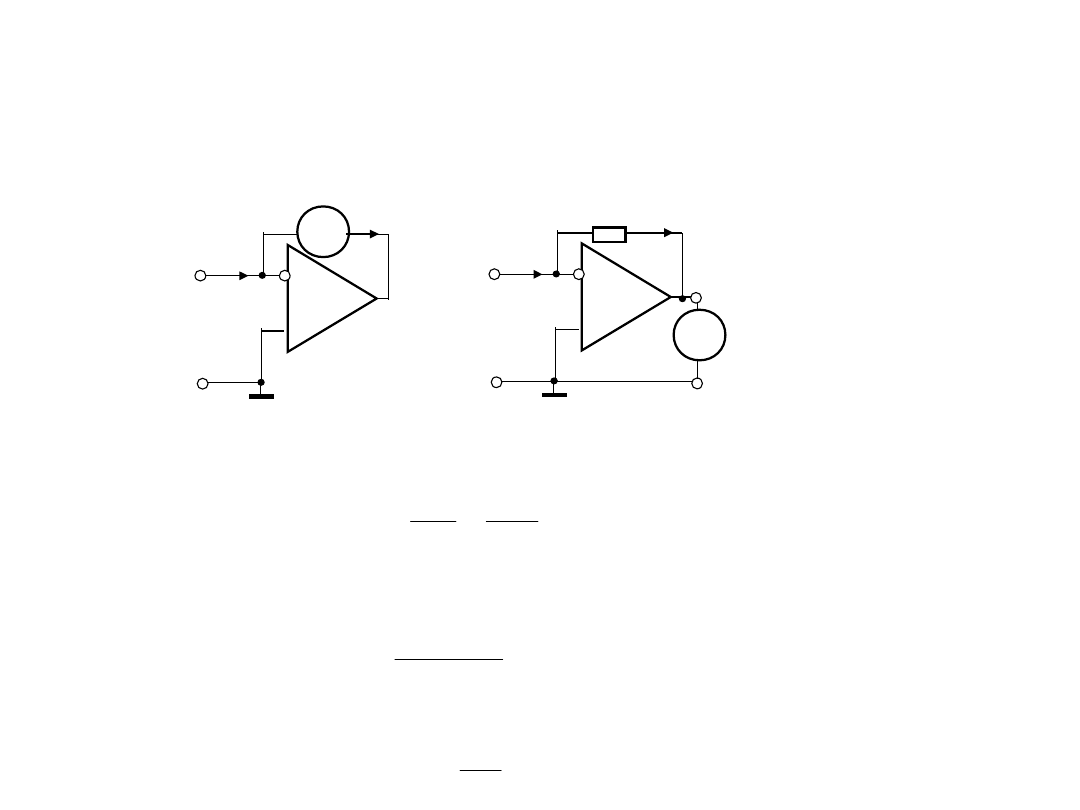
W układzie ze wzmocnieniem napięcia wyjściowego (rys.4,b)
napięcie wyjściowe równa się:
Gdzie wzmocnienie prądu wynosi
WO
I
x
-
R
F
I
x
U
wy
=-I
x
R
F
K
wi
R
1
R
2
V
+
I
F
x
F
F
x
F
x
wy
v
K
R
I
R
R
R
R
I
R
R
R
R
I
U
U
1
1
1
1
2
1
1
2
1
F
I
R
R
R
K
1
1
1
2
1
2. Układy wejściowy
amperomierze
2.3. Bazowa konfiguracja układu wejściowego nano – i
pikoamperomierze
Przykład 4a
. Jeżeli
Ix=1 nA
i na wyjściu przetwornika dalej
chcemy otrzymać
Uwy=1 V
przy ograniczonej wartości
rezystancji sprężenia zwrotnego , wtedy wartość
współczynnika wzmocnienia prądu powinna równać się:
Dlatego przy oraz zakładając ograniczoną wartość rezystancji
otrzymuje się wartość rezystancji R2
WO
I
x
-
R
F
I
x
U
wy
=-I
x
R
F
K
wi
R
1
R
2
V
+
1000
1
1
1
MOhm
nA
V
R
I
U
K
F
x
wy
I
kOhm
MOhm
R
R
K
R
R
F
I
F
002
,
1
1
1
1
1000
1
1
1
1
2
2. Układy wejściowy
amperomierze
2.3. Bazowa konfiguracja układu wejściowego nano – i
pikoamperomierze
Przykład 4b
. Jeżeli
Ix=10 pA
i na wyjściu przetwornika dalej
chcemy otrzymać
Uwy=1 V
przy ograniczonej wartości
rezystancji sprężenia zwrotnego , wtedy wartość
współczynnika wzmocnienia prądu powinna równać się:
Jest to zbyt duża wartość, dlatego ze przy współczynniku
wzmocnienia W0 A
0
=10
6
błąd statyczny będzie równać się:
WO
I
x
-
R
F
I
x
U
wy
=-I
x
R
F
K
wi
R
1
R
2
V
+
100000
1
10
1
MOhm
pA
V
R
I
U
K
F
x
wy
I
%
9
1
10
10
1
1
1
5
6
0
0
I
A
K
A
2. Układy wejściowy
amperomierze
2.3. Bazowa konfiguracja układu wejściowego nano – i
pikoamperomierze
Przykład 4b
.
Ix=10 pA
i
Uwy=1 V
:
Dlatego należy zwiększyć wartość rezystancji
R
1
=R
F
=33,333
MOhm
, wtedy wartość współczynnika wzmocnienia prądu
powinna równać się
i wartość rezystancji R2 będzie równać się:
WO
I
x
-
R
F
I
x
U
wy
=-I
x
R
F
K
wi
R
1
R
2
V
+
3000
33
,
33
10
1
MOhm
pA
V
R
I
U
K
F
x
wy
I
%
3
,
0
1
10
3
10
1
3
6
0
A
kOhm
MOhm
R
R
K
R
R
F
I
F
1185
,
11
1
1
1
3000
33
,
33
1
1
1
2
2. Układy wejściowy
amperomierze
2.3. Bazowa konfiguracja układu wejściowego nano – i
pikoamperomierze
Przykład 4b
.
Ix=10 pA
i
Uwy=1 V
:
Są to bardzo dobre wyniki, ponieważ przy ograniczonych
wartościach rezystancji do (1-33) MOhm (zamiast
100 GOhm) otrzymuje się na wyjściu napięcie 1 V przy
prądzie 10 pA.
WO
I
x
-
R
F
I
x
U
wy
=-I
x
R
F
K
wi
R
1
R
2
V
+
2. Układy wejściowy
amperomierze
2.4.
Podstawowym problemem układów nano- i pikoamperomierzy
jest wpływ wejściowego prądu wzmacniacza operacyjnego
(Iwe), który zniekształca prąd mierzony bezpośrednio,
ponieważ prąd przez rezystancję RF równa się sumie prądu
mierzonego Ix oraz prządu wej ościowego WO Iwe:
I
F
=I
x
+I
we
.
Stąd napięcie na wyjściu układu
U
wy
=I
F
·R
F
=(I
x
+I
we
)·R
F
Względny błąd przetwarzania równa się
Dlatego wymagany jest WO o niskim poziomie prądów wejściowych
niezrównoważenia oraz zabezpieczenia przeciw oddziaływań
innych prądów upływu przez rezystancje izolacji płytki
montażowej.
U
wy
WO
-
+
R
F
I
F
=I
x
+I
we
I
x
I
we
x
we
Iwe
I
I

Pomiary małych i
dużych rezystancji

Cel: Zapoznać się z podstawowymi schematami
układów elektronicznych omomierze.
Plan:
1. Wstęp. Problemy przetwarzania
rezystancji w napięcie
2. Pomiary małych rezystancji
3. Pomiary dużych rezystancji

1. Wstęp. Problemy pomiaru małych
rezystancji
Rozróżnia się układy do pomiaru małych, średnich
oraz dużych rezystancji (impedancji).
Przy pomiarach małych rezystancji (poniżej ok.
10 ...100 ) na wynik pomiaru wpływają
rezystancji przewodów (rys. 1,a). Im mniejsza
rezystancja pomiarowa tym większy wpływ
rezystancji przewodów.
Przy pomiarach dużych rezystancji (powyżej ok.
10 M...100 M) na wynik pomiaru wpływają
rezystancji wejściowe przetwornika, izolacja, prądy
upływów i t.p. (rys. 1,b).
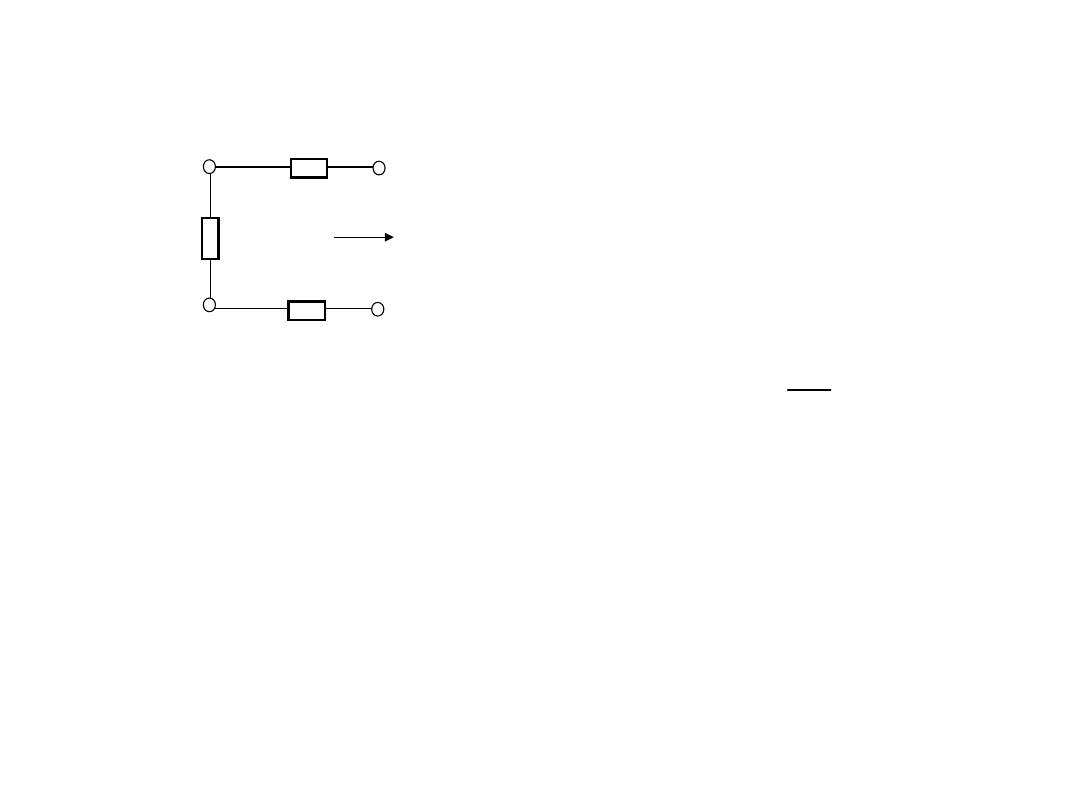
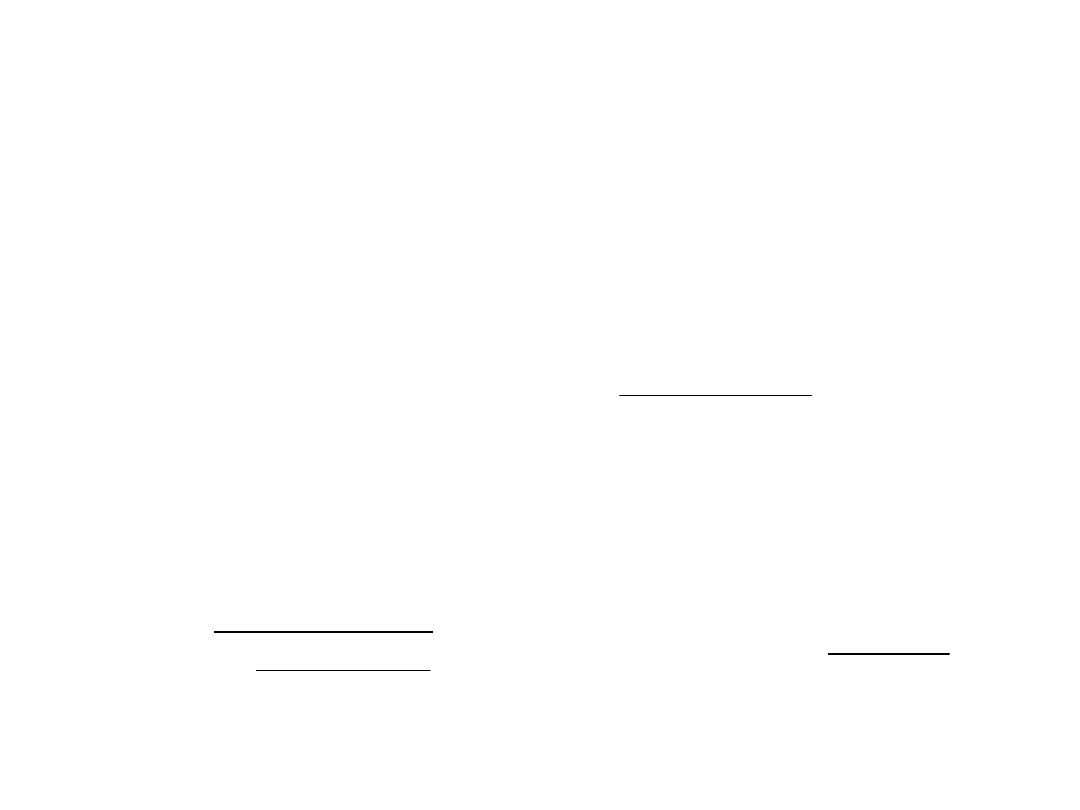
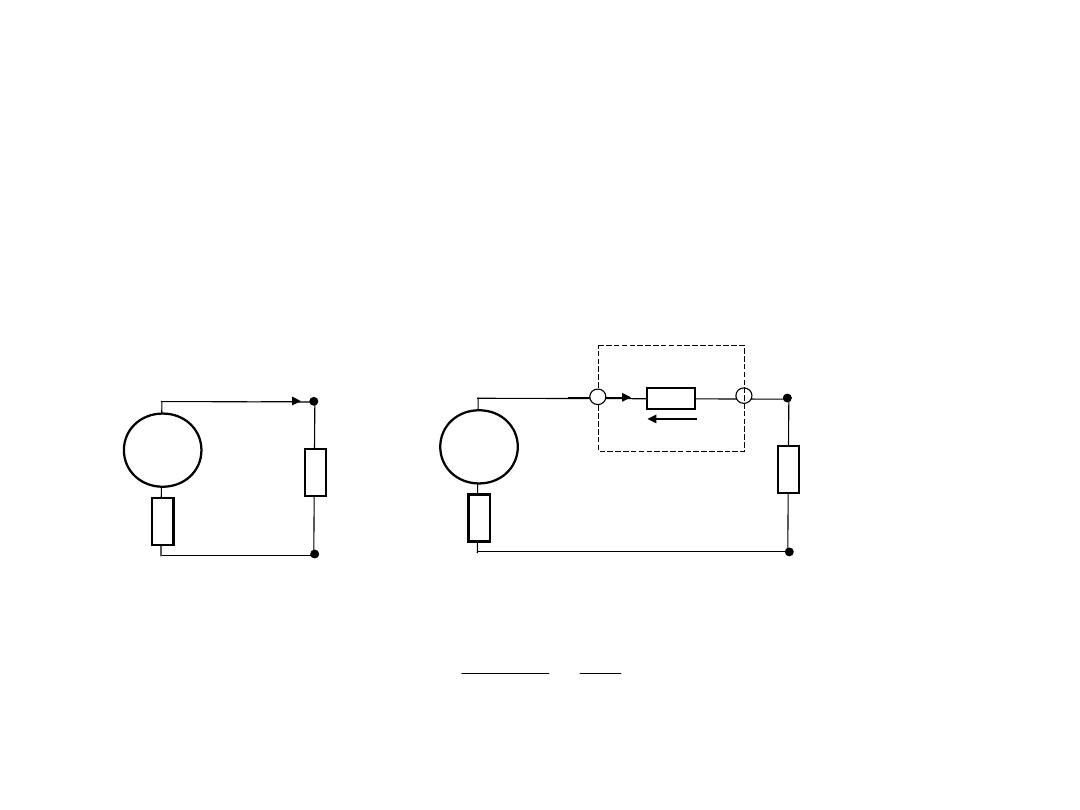
2. Do wpływu rezystancji przewodów linii
• Wpływ rezystancji przewodów
• Dla wartości średnich (od ok. 1 k do ok.
10 M) wpływ przewodów z rezystancją ok.
R
l
=0,1 jest mniejszy od 0,01%
R
x
Do miernika
rezystancji
R
l
R
l
x
l
Rl
R
R
2
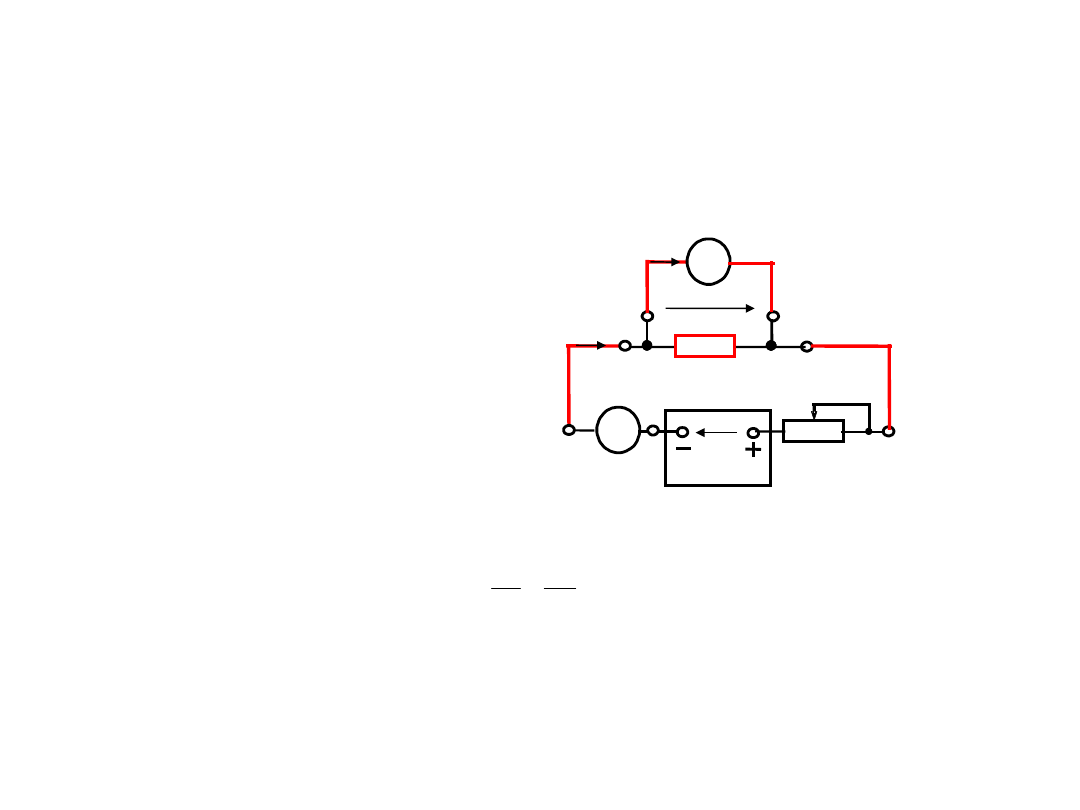
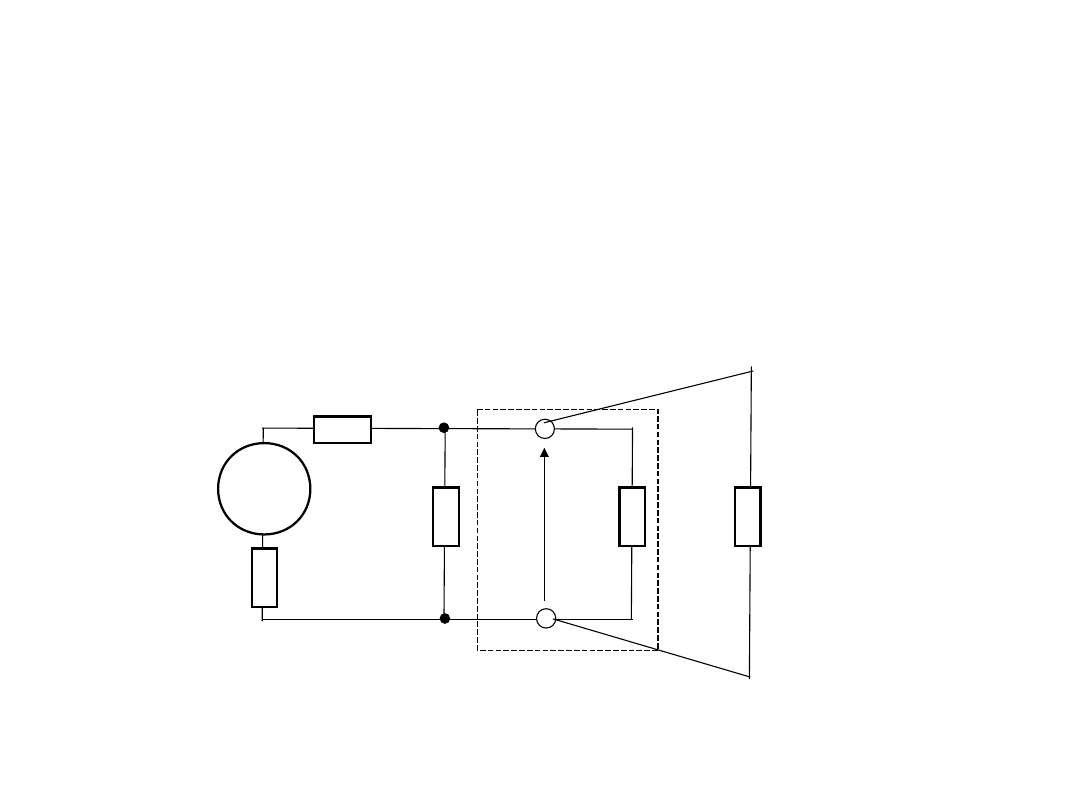
3. Do pomiaru małych rezystancji
4- przewodowe podłączenie
badanego rezystora do
układu pomiarowego:
Rozdzielone obwody:
prądowy (wymuszenie) i
napięciowy (pomiar)
Zas.
R
X
A
R
reg
R
L1
U
0
I
x
V
U
x
I
V
<<I
x
R
L2
R
L3
R
L4
I
V
Jeśli R
V
>> R
x
wtedy I
V
<< R
x
i I
A
= I
x
stąd
praktycznie U
V
=U
x
=I
x
×R
x
A
V
x
x
x
I
U
I
U
R
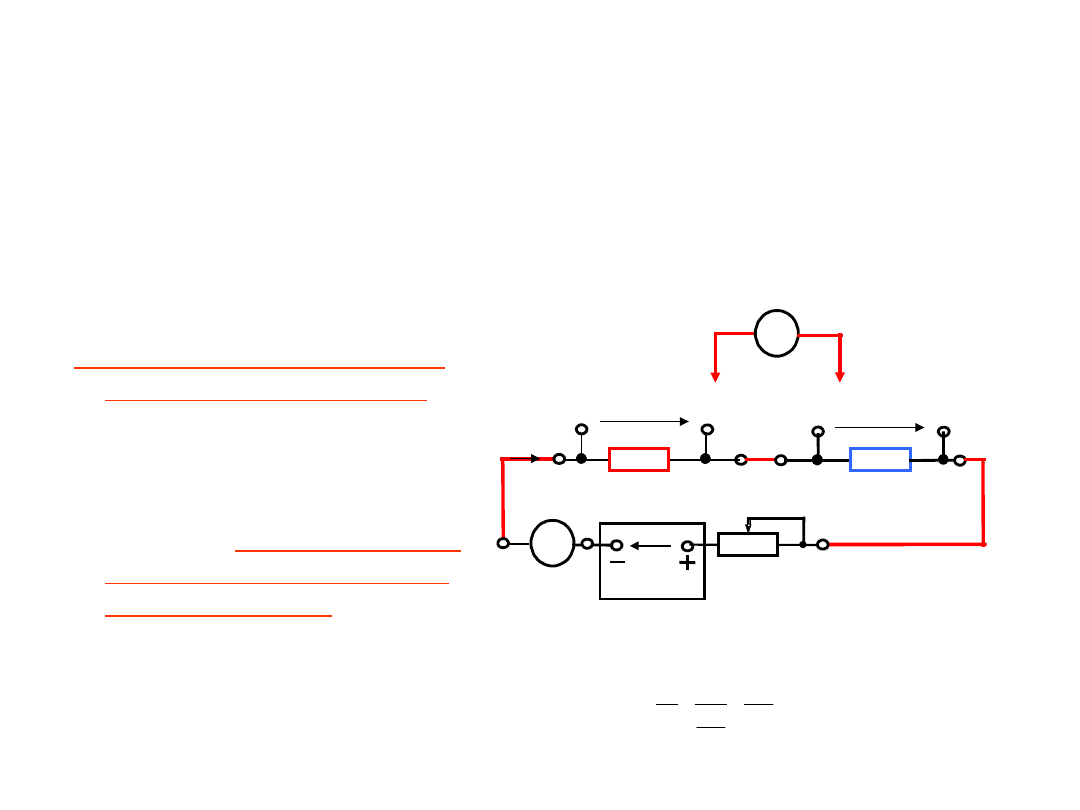
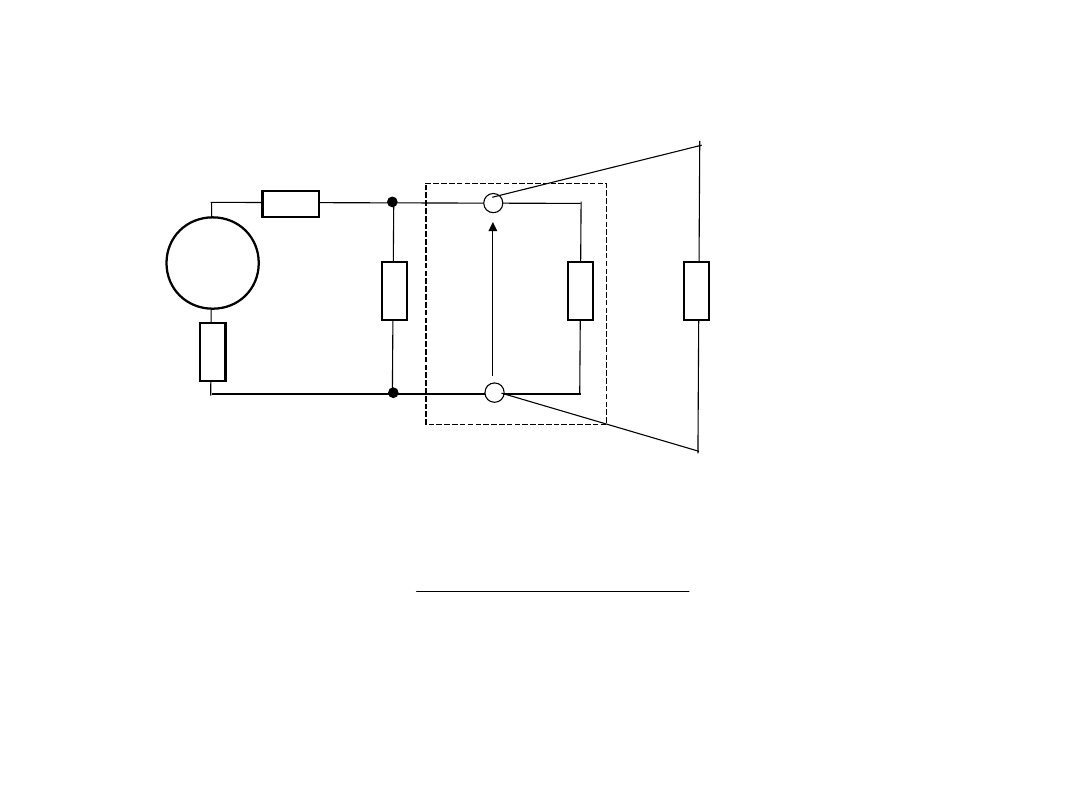
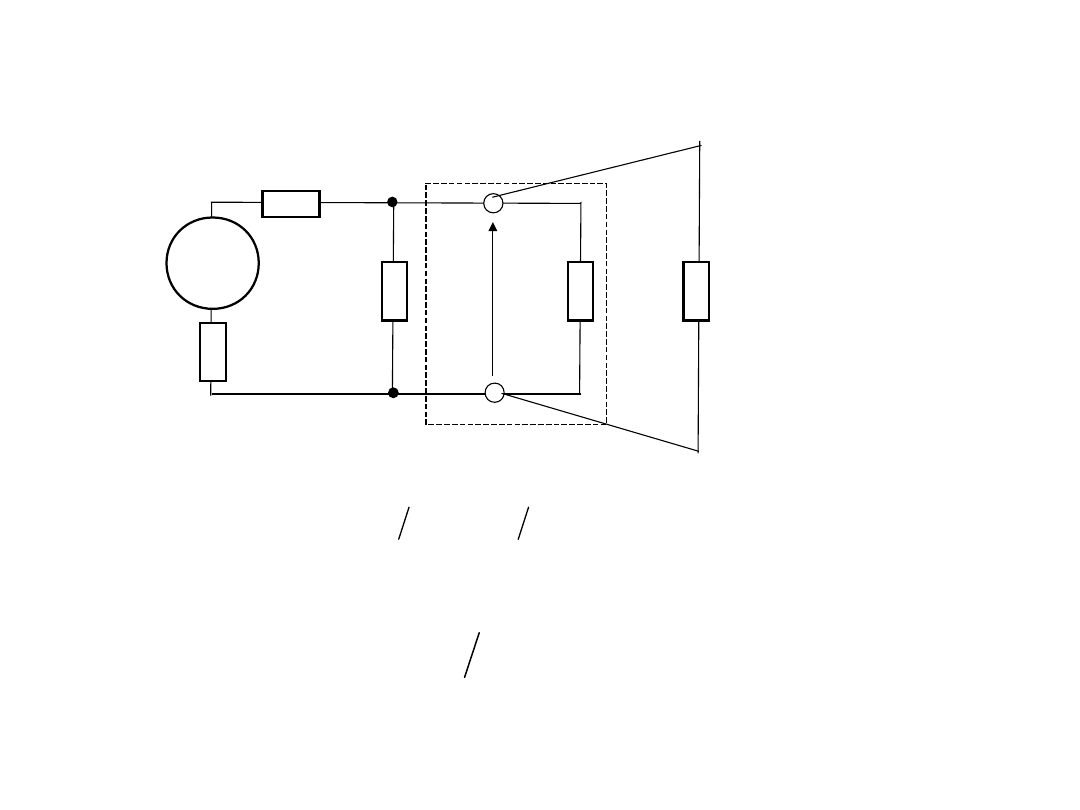
3. Do pomiaru małych rezystancji
4- przewodowe podłączenie
badanego rezystora do
układu pomiarowego:
Rozdzielone obwody
:
prądowy (wymuszenie) i
napięciowy (pomiar).
Zwiększenie dokładności
:
Pośredni pomiar prądu
poprzez pomiar spadku
napięcia na rezystorze
wzorcowym Rn
Zas.
R
x
A
R
reg
R
L1
U
0
I
x
R
L3
R
L4
U
x
R
L2
R
n
V
U
n
R
L2
1 pomiar
2 pomiar
1 pomiar
: U
V1
=I
x
×R
x
;
2 pomiar
: U
V2
=I
x
×R
n
Wynik
n
V
V
n
V
V
x
x
x
R
U
U
R
U
U
I
U
R
2
1
2
1
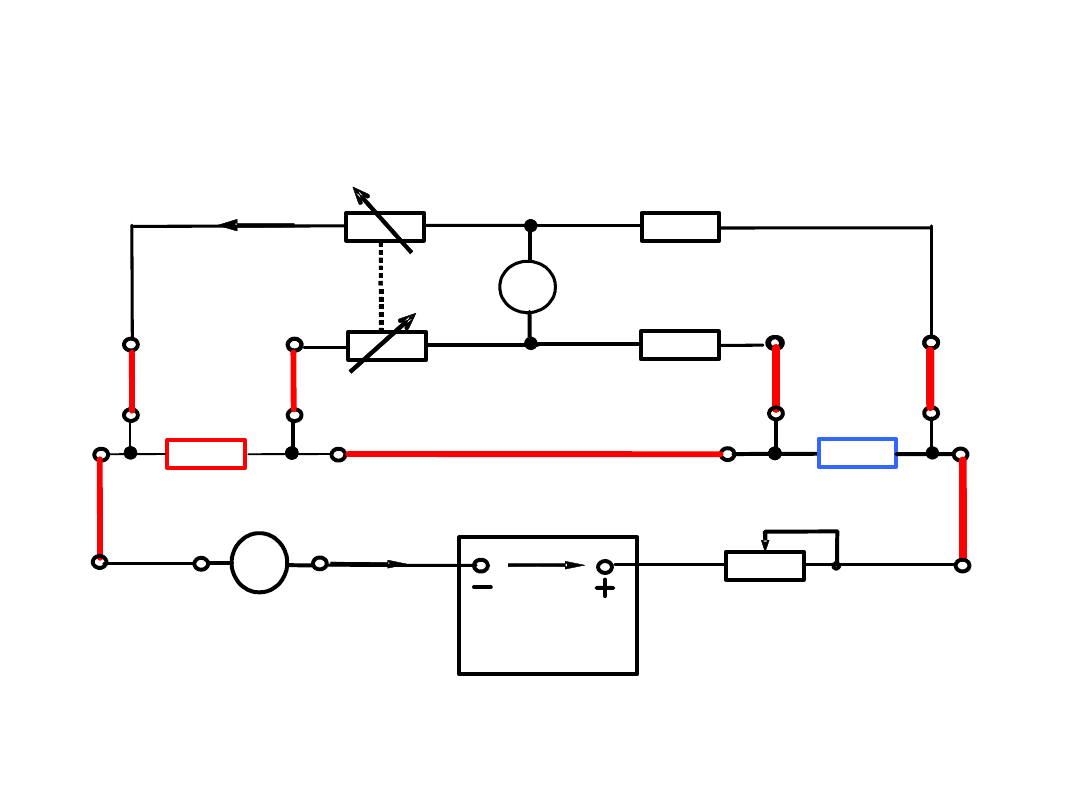
4. Do pomiaru małych rezystancji
Mostek Thomsona
Zas.
r
3
r
r
4
r
1
r
2
R
N
R
B
R
A
R
X
A
R
reg
r
5
R`
zr
R
zr
G
U
0
I
a
c
b
r
6
I
G
=0
g
I
M
4.
Do pomiaru małych rezystancji:
Mostek
Thomsona
Warunkiem zrównoważenia mostka (przy bardzo małej
rezystancji (r=0) przewodu pomiędzy punktami a-c) – prąd
przez galwanometr równa się zeru (Ig=0) jest równanie
0
zr
A
zr
N
x
X
zr
M
x
g
R
R
R
U
U
U
R
I
U
U
zr
N
B
x
R
U
R
U
A
zr
N
x
M
R
R
U
U
I
x
x
R
I
U
N
N
R
I
U
Zas.
r
3
r
r
4
r
1
r
2
R
N
R
B
R
A
R
X
A
R
reg
r
5
R`
zr
R
zr
G
U
0
I
a
c
b
r
6
I
G
=0
g
I
M
4.
Do pomiaru małych rezystancji:
Mostek
Thomsona
Warunkiem zrównoważenia mostka – równanie pomiaru
A
zr
N
x
R
R
R
R
Zas.
r
3
r
r
4
r
1
r
2
R
N
R
B
R
A
R
X
A
R
reg
r
5
R`
zr
R
zr
G
U
0
I
a
c
b
r
6
I
G
=0
g
I
M
Do pomiaru małych rezystancji
:
Mostek
Thomsona
Start 5.12.2011
Na ogół przy pomiarach bardzo małych wartości rezystancji
należy uwzględniać
niezerowe wartości rezystancji
przewodów
, którymi podłącza się rezystor mierzony
R
x
,
wzorcowy
R
N
oraz elementy mostka. Wtedy równanie mostka
ma postać:
d
r
R
R
r
R
R
B
N
zr
x
2
1
)
(
4
3
2
1
4
3
/
4
)
(
r
R
r
R
r
R
r
R
r
r
r
R
R
r
r
R
d
А
z
B
zr
zr
A
A
Zas.
r
3
r
r
4
r
1
r
2
R
N
R
B
R
A
R
X
A
R
reg
r
5
R`
zr
R
zr
G
U
0
I
a
c
b
r
6
I
G
=0
g
I
M
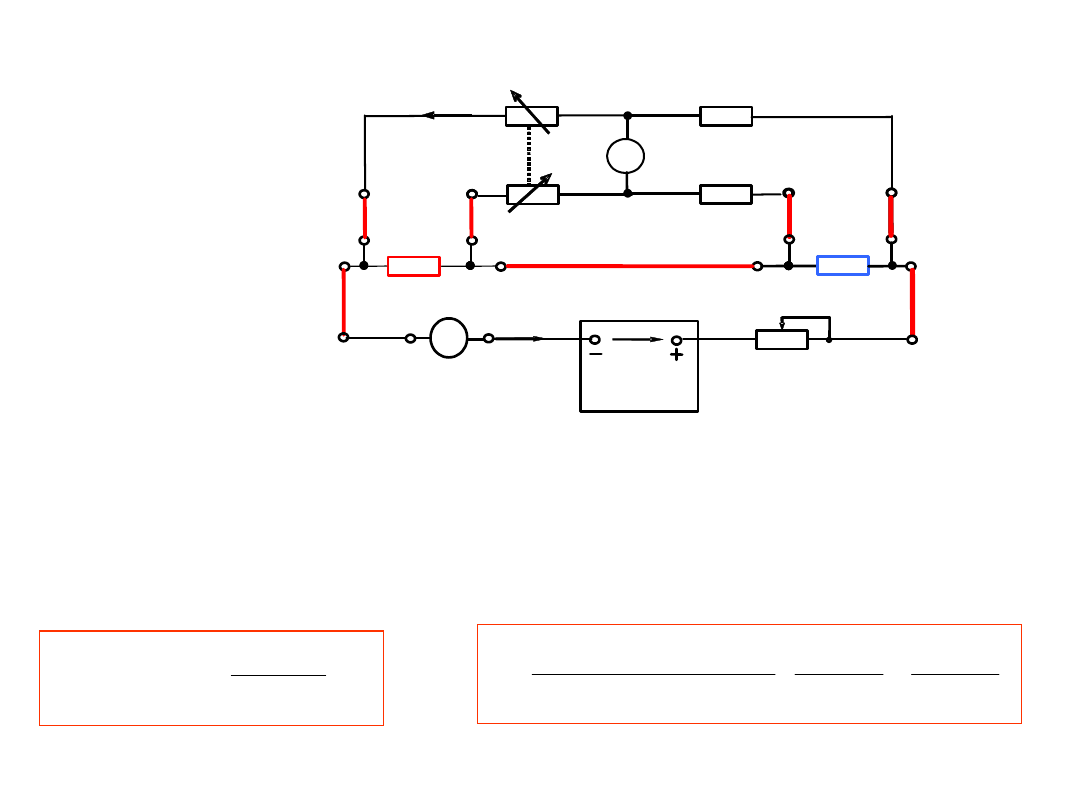
Do pomiaru małych rezystancji:
Mostek
Thomsona
Na ogół przy pomiarach bardzo małych wartości rezystancji
należy uwzględniać
niezerowe wartości rezystancji
przewodów
, którymi podłącza się rezystor mierzony
R
x
,
wzorcowy
R
N
oraz elementy mostka. Wtedy równanie mostka
ma postać:
d
r
R
R
r
R
R
A
N
zr
x
2
1
)
(
4
3
2
1
4
3
/
4
)
(
r
R
r
R
r
R
r
R
r
r
r
R
R
r
r
R
d
B
z
A
zr
zr
B
B
Zas.
r
3
r
r
4
r
1
r
2
R
N
R
B
R
A
R
X
A
R
reg
r
5
R`
zr
R
zr
G
U
0
I
a
c
b
r
6
I
G
=0
g
I
M
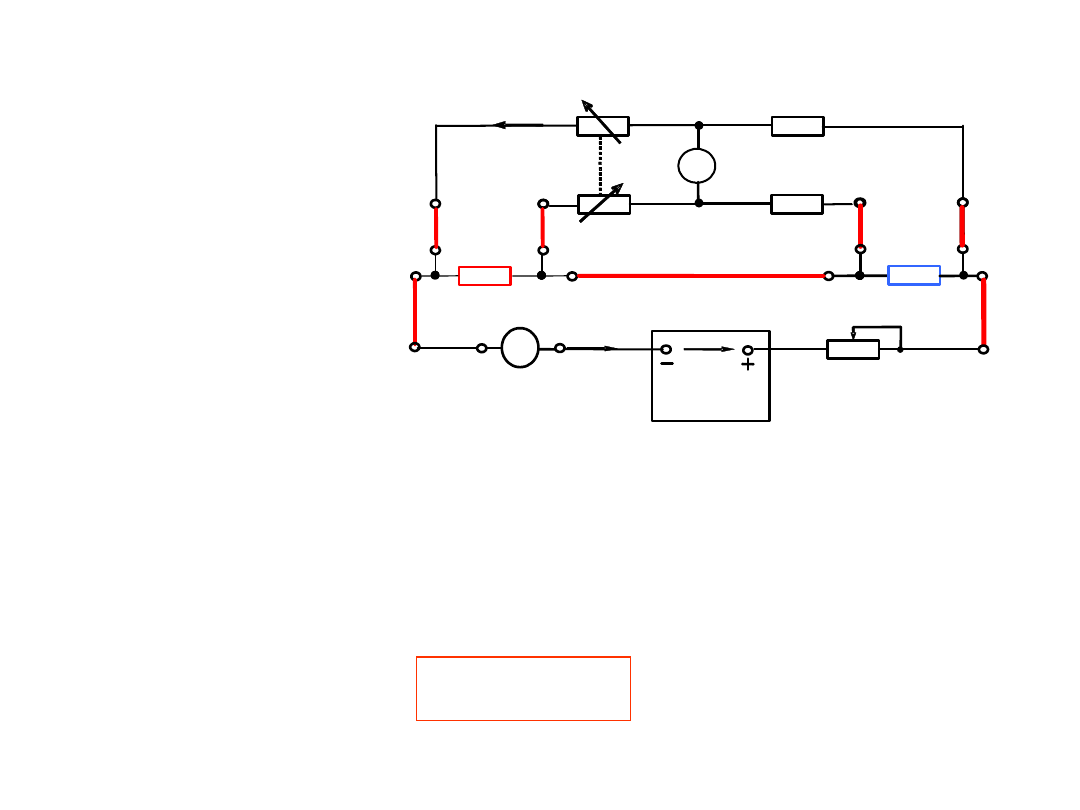
Do pomiaru małych rezystancji:
Mostek
Thomsona
Zwykle rezystancja rezystora wzorcowego
R
N
=10
k
,
gdzie
k
jest liczbą całkowitą ujemną lub dodatnią,
oraz rezystancja rezystora też krotna 10:
R
A
=10
m
,
gdzie
m
jest liczbą dodatnią (R
A
=10; 100; 1000;
10000Ω), dlatego stosunek
R
N
/R
A
=10
n
– jest krotny
10 (n liczba całkowita) i uproszczony wzór na
wartość rezystancji mierzonej ma postać:
Zas.
r
3
r
r
4
r
1
r
2
R
N
R
B
R
A
R
X
A
R
reg
r
5
R`
zr
R
zr
G
U
0
I
a
c
b
r
6
I
G
=0
g
I
M
zr
n
x
R
R
10
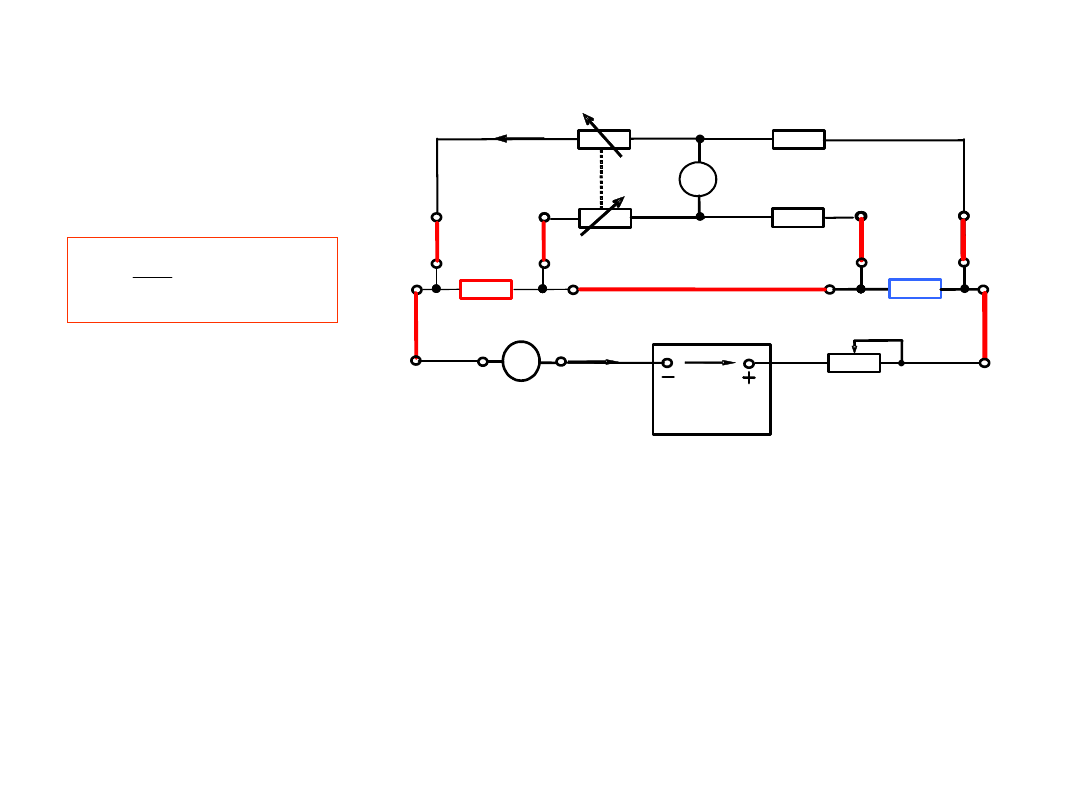
Do pomiaru małych rezystancji:
Mostek
Thomsona
Mostki Thomsona wykorzystują się do pomiaru
małych wartości
rezystancji: w zakresie od
10
-8
do
10
2
Ω
, jest to możliwie dzięki
małym wartościom rezystancji R
N
od
10
-5
…do
10 Ω
.
Zas.
r
3
r
r
4
r
1
r
2
R
N
R
B
R
A
R
X
A
R
reg
r
5
R`
zr
R
zr
G
U
0
I
a
c
b
r
6
I
G
=0
g
I
M
zr
n
zr
A
N
x
R
R
R
R
R
10
5. Niepewność wyniku pomiaru
mostkiem Thomsona
Względna złożona niepewność standardowa wyniku pomiaru
rezystancji, obliczona metodą typu B:
-
względne graniczne (dopuszczalne)
odchylenia odpowiednich rezystancji mostka od wartości
nominalnych
;
(d)
u
)
(R
u
)
(R
u
3
2
rel
B,
nc
x,
2
rel
B,
kw
zr,
2
rel
B,
2
2
2
gr
,
R
gr
,
R
gr
,
R
x
rel
,
B
N
A
zr
R
u
gr
,
R
gr
,
R
gr
,
R
N
A
zr
;
;
5. Niepewność wyniku pomiaru
mostkiem Thomsona
Względna złożona niepewność standardowa wyniku pomiaru
rezystancji, obliczona metodą typu B:
Względna niepewność od kwantowania
(dyskretności)
rezystancji zrównoważenia R
zr
oblicza się z wzoru
Względna niepewność od nieczułości
oblicza się z wzoru
gdzie
- zmiana rezystancji zrównoważenia wywołująca
odchylenie wskaźnika galwanometru o 0,1 podzialki
(d)
u
)
(R
u
)
(R
u
3
2
rel
B,
nc
x,
2
rel
B,
kw
zr,
2
rel
B,
2
2
2
gr
,
R
gr
,
R
gr
,
R
x
rel
,
B
N
A
zr
R
u
%
100
3
)
(
)
(R
u
1
,
0
nc
x,
rel
cB,
zr
dz
zr
R
R
%
100
3
5
,
0
)
(R
u
,
kw
zr,
rel
B,
zr
kw
zr
R
R
dz
zr
R
1
,
0
)
(
5. Niepewność wyniku pomiaru
mostkiem Thomsona
Względna złożona niepewność standardowa wyniku pomiaru
rezystancji, obliczona metodą typu B:
Względna niepewność od członu
d
(niezerowej wartości rezystancji
r≠0
)
k=R
x
/R
N
(d)
u
)
(R
u
)
(R
u
3
2
rel
B,
nc
x,
2
rel
B,
kw
zr,
2
rel
B,
2
2
2
gr
,
R
gr
,
R
gr
,
R
x
rel
,
B
N
A
zr
R
u
k
k
R
r
d
u
x
R
rel
,
B
gr
.
zr
1
3
4
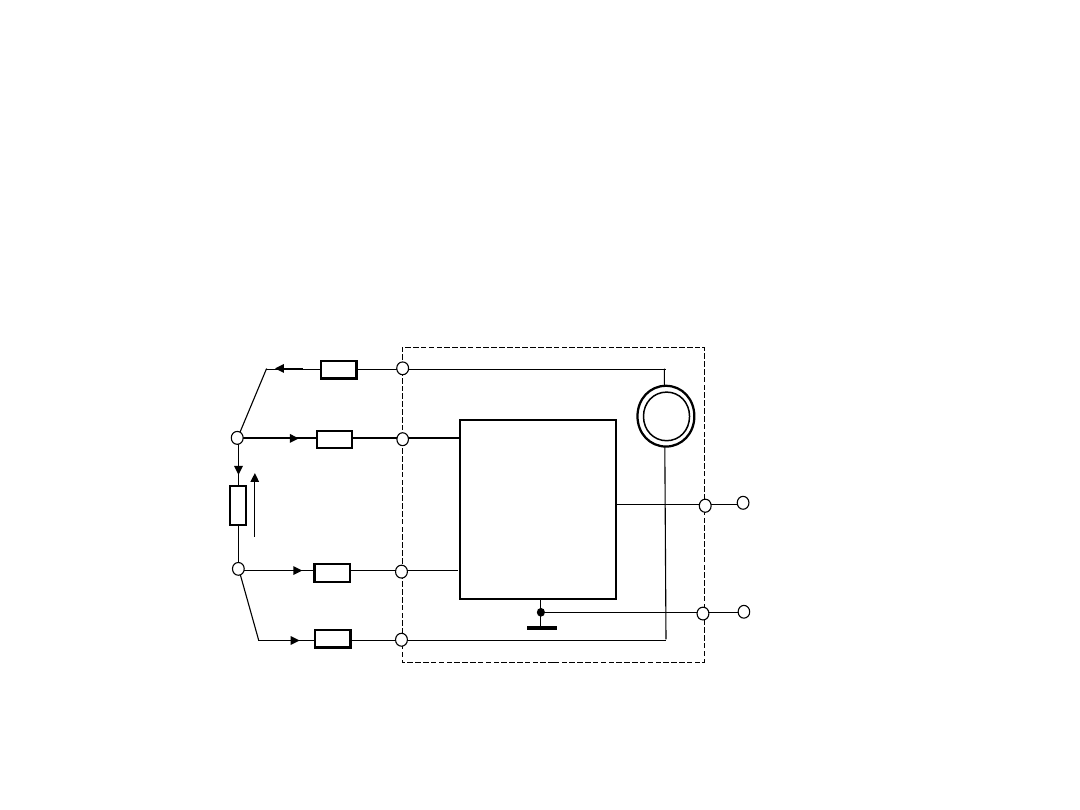
6. Omomierz z 4-przewodowym
podłączeniem rezystora badanego.
- Przetwornik rezystancji ze źródłem prądowym oraz
wzmacniaczem instrumentalnym.
Podstawowy problem polega na eliminacji wpływu rezystancji
przewodów linii. W tym celu wykorzystuje się połączenia
czteroprzewodowe (rys.2).
Do schematu przetwarzania małej wartości rezystancji
Wzmacniacz
instrumentaln
y
K
WI
R
l2
R
l3
R
l1
R
l4
U
wy
=
=K
wi
I
0
R
x
I
0
WE
WY
1
2
3
4
R
x
U
x
I
0
I
0
I
0
I
we2
=
0
I
we3
=
0
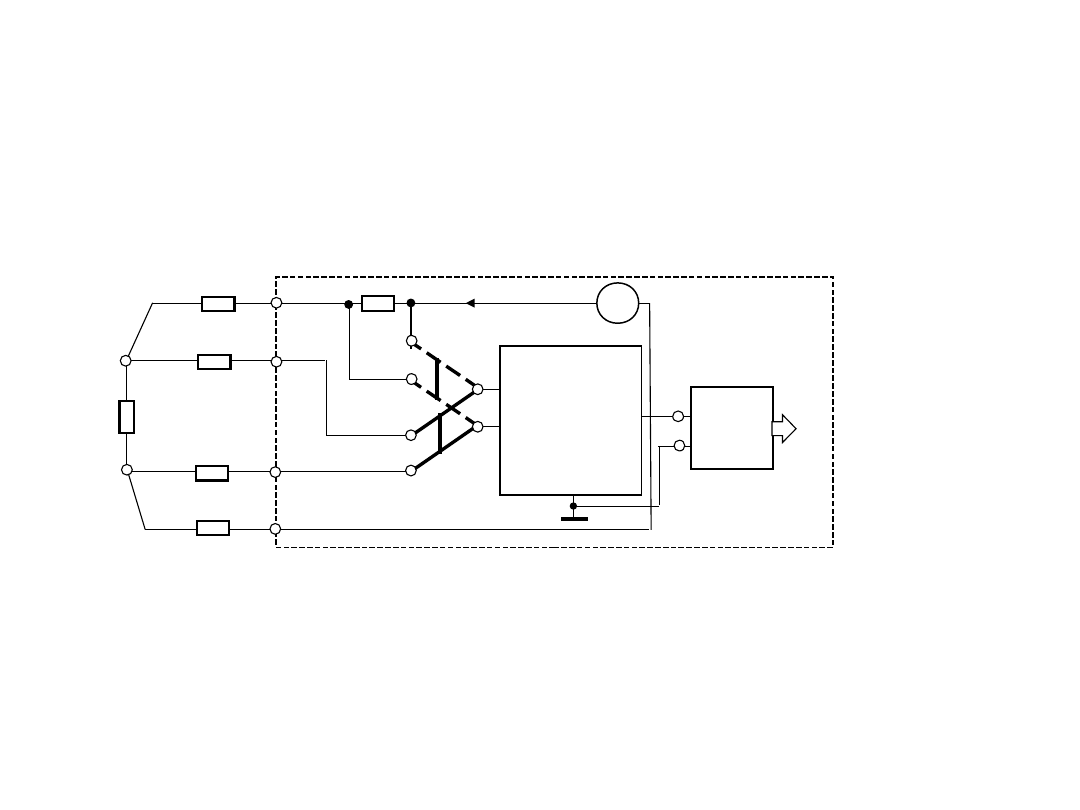
7. Omomierz z 4-przewodowym podłączeniem
rezystora badanego (
ze źródłem napięciowym oraz
rezystorem referencyjnym i wzmacniaczem
instrumentalnym
).
Eliminacja wpływu rezystancji przewodów linii bazuje na pomiarze
prądu wymuszającego, poprzez pomiar spadku napięcia na
rezystorze referencyjnym
Schemat pomiaru małej wartości rezystancji w układzie ze źródłem
napięciowym oraz rezystorem referencyjnym i wzmacniaczem
instrumentalnym
R
x
Wzmacniacz
instrumental
ny
K
WI
R
l2
R
l3
R
l1
R
l4
N
x
=I
pom
R
x
K
wi
k
ADC
WE
WY
1
2
3
3
4
U
0
I
pom
R
ref
U
Rref
U
x
1
2
ADC
k
ADC
N
ref
=I
pom
R
ref
K
wi
k
ADC
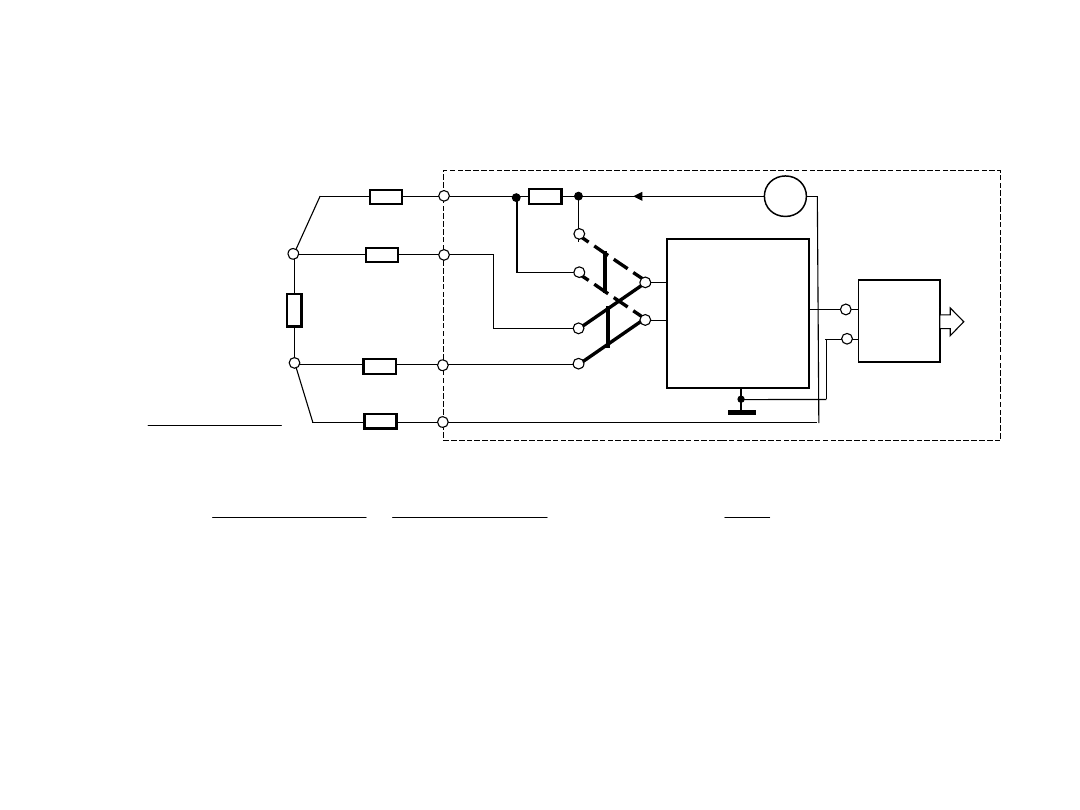
7. Omomierz z 4-przewodowym
podłączeniem rezystora badanego (
ze
źródłem napięciowym oraz rezystorem
referencyjnym i wzmacniaczem
instrumentalnym
).
Otóż wynik pomiaru jest niezależny od wartości napięcia
zasilającego (prądu wymuszającego) oraz rezystancji
przewodów linii. Wymagano jest tylko krótko czasowa stabilność
wszystkich parametrów układu pomiarowego.
R
x
Wzmacniacz
instrumental
ny
K
WI
R
l2
R
l3
R
l1
R
l4
N
x
=I
pom
R
x
K
wi
k
ADC
WE
WY
1
2
3
3
4
U
0
I
pom
R
ref
U
Rref
U
x
1
2
ADC
k
ADC
N
ref
=I
pom
R
ref
K
wi
k
ADC
ADC
wi
ref
ref
pom
k
K
R
N
I
ref
ref
x
ADC
WI
ref
ADC
WI
ref
x
ADC
WI
pom
x
x
R
N
N
k
K
R
k
K
N
N
k
K
I
N
R
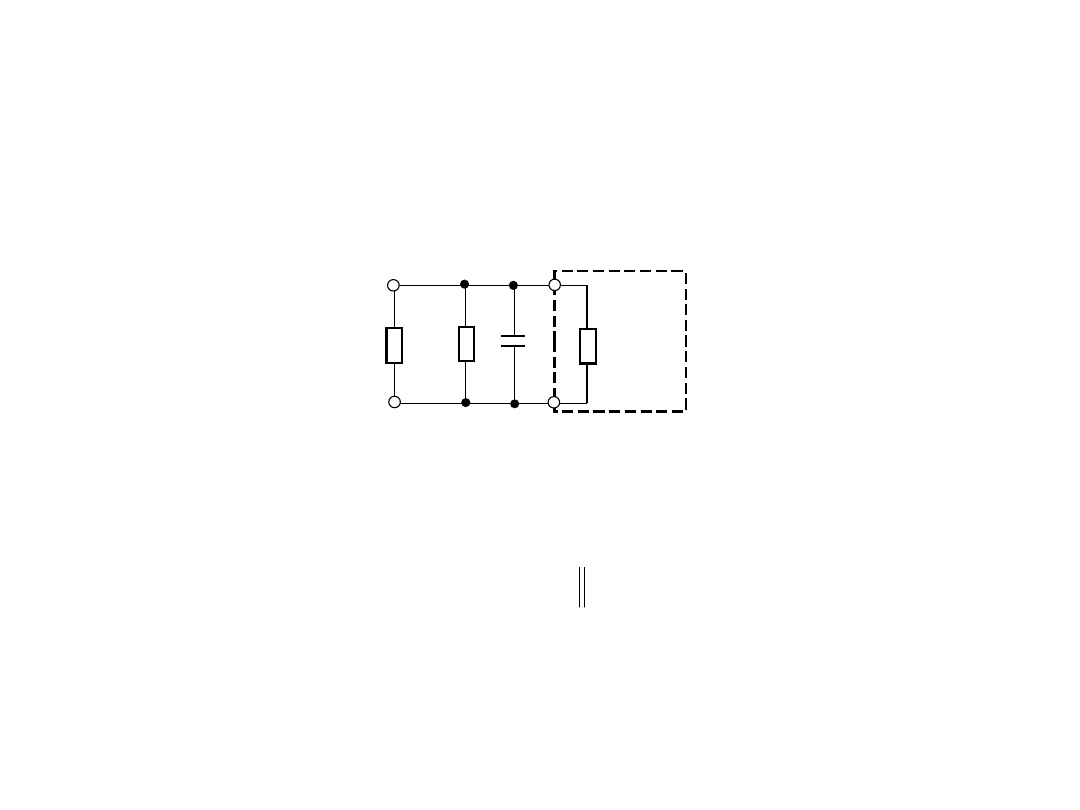
8. Pomiary dużych rezystancji
Problem pomiarów (przetworników) dużych rezystancji
polega we wpływie rezystancji izolacji R
k
i pojemności
C
k
kabla oraz wzmacniacze operacyjnych.
Te parametry bocznikują rezystancją mierzoną, wskutek
czego wynik pomiaru równa się rezystancji
równoległego połączenia mierzonego i kabla
Pojemność kabla powoduje zwiększenie czasu pomiaru
ponieważ wzrasta stała czasowa obwodu
pomiarowego
R
x
R
we
R
k
kabel
Miernik
C
k
k
x
pom
R
R
R
k
x
x
C
R
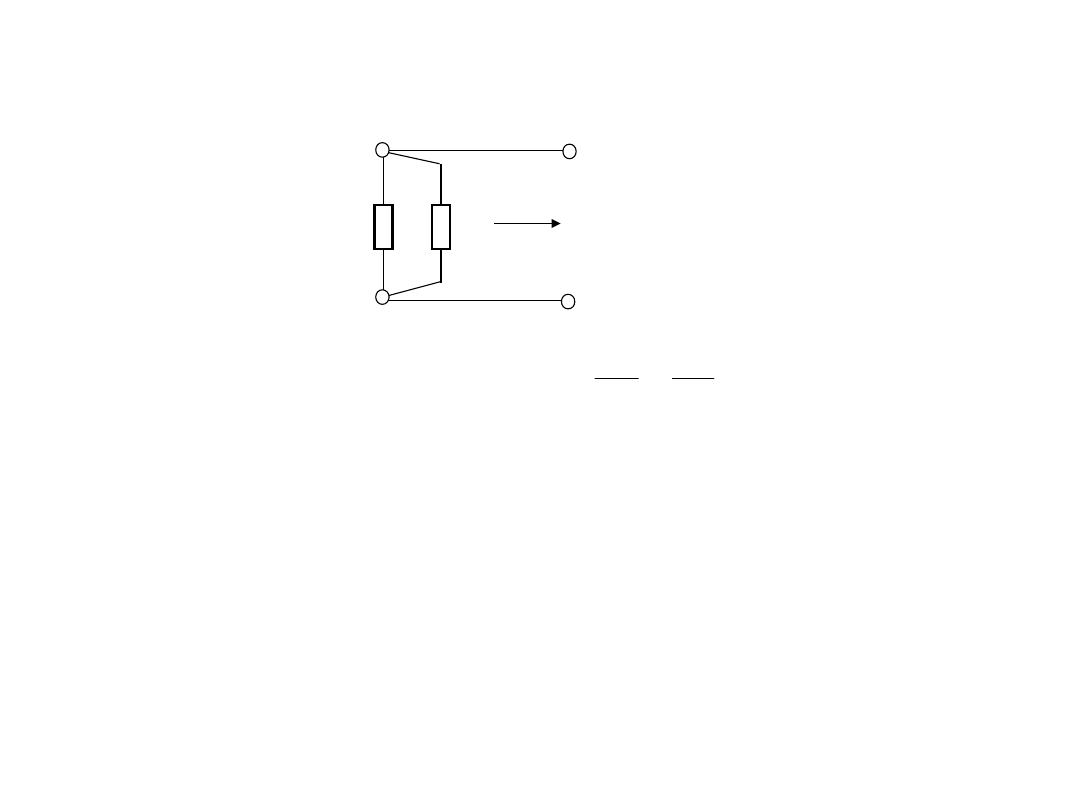
8. Pomiary dużych rezystancji
Wpływ rezystancji izolacji kable
• wpływ izolacji z rezystancją powyżej
R
iz
=100 G przy R
x
<100M
jest mniejszy od 0,1%.
Do miernika
rezystancji
R
x
R
iz
iz
x
x
iz
iz
R
R
G
G
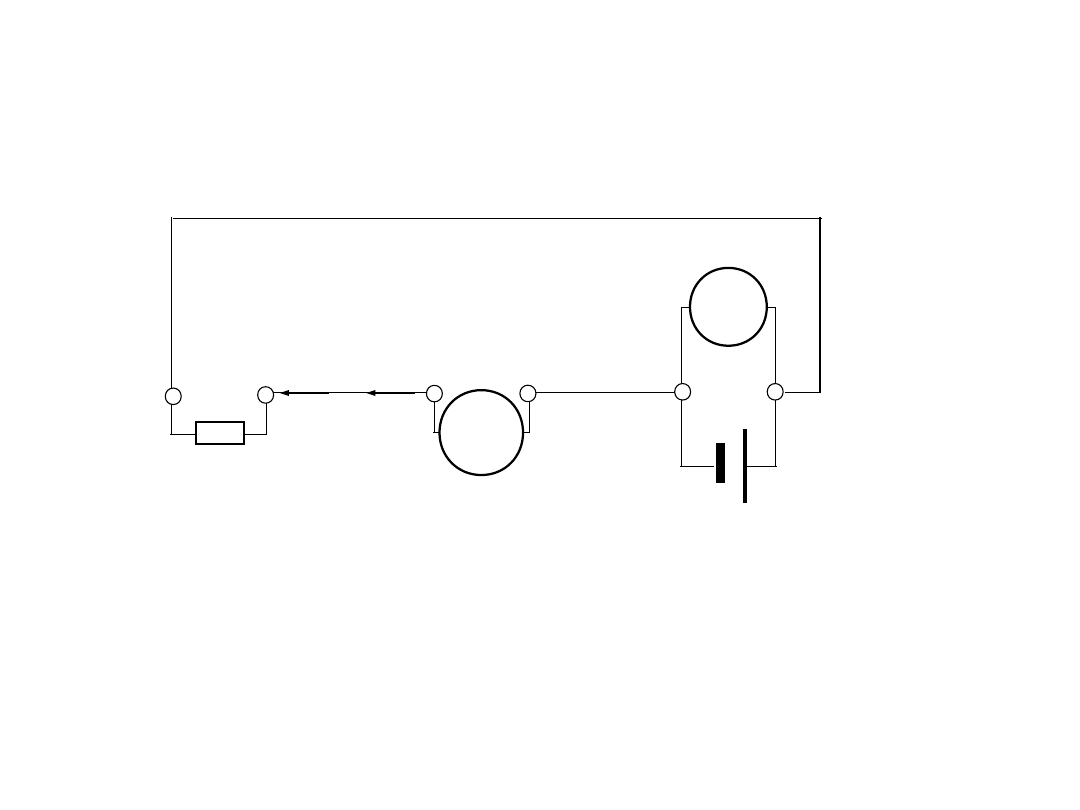
8. Pomiary dużych rezystancji
Rys.5. Zasada pomiaru rezystancji rezystancji
I
nA
R
x
U
zas
nA
I
x
V
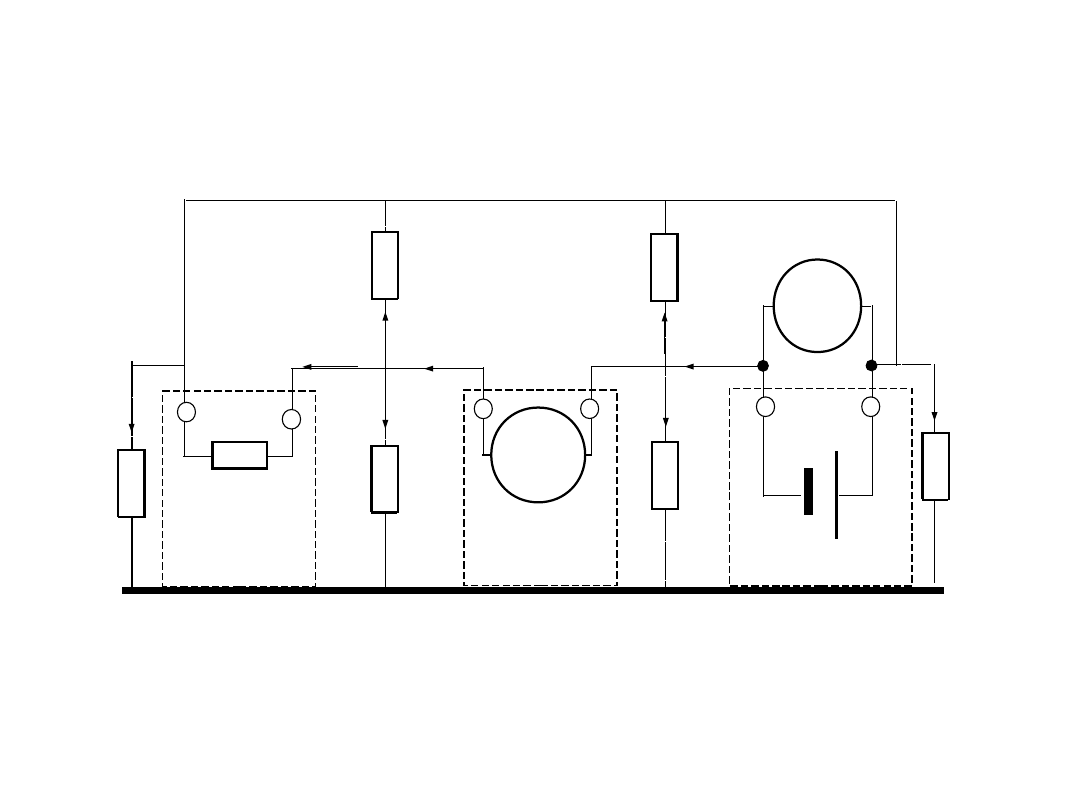
8. Pomiary dużych rezystancji
Rys. Układ zastępczy uwzględniający wpływ rezystancji izolacji
R
k2
I
nA
R
x
R
iz2
R
iz1
U
zas
nA
R
k1
I
x
I
zas
I
izU
I
izx
I
k2
I
iz2
I
iz1
I
k1
V
R
izU
R
izx
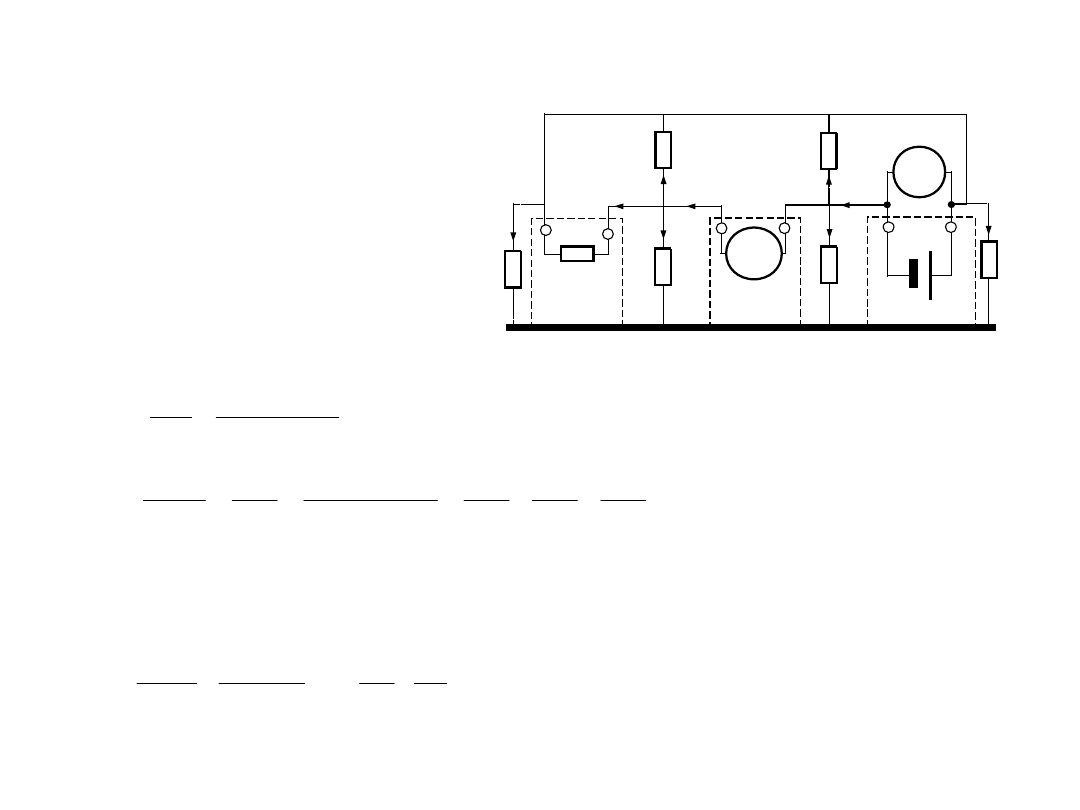
3. Pomiary dużych rezystancji
Wynik pomiaru prądu:
I
nA
=I
x
+I
iz2
+I
k2
Zamiast I
nA
=I
x
Prądy przez izolacje I
iz2
=U
zas
/R
iz2
oraz kabel I
k2
=U
zas
/R
k2
powodują powstanie błędu:
R
k2
I
nA
R
x
R
iz2
R
iz1
U
zas
nA
R
k1
I
x
I
zas
I
izU
I
izx
I
k2
I
iz2
I
iz1
I
k1
V
R
izU
R
izx
2
2
k
iz
x
zas
nA
zas
pom
,
x
I
I
I
U
I
U
R
2
2
2
2
2
2
1
k
iz
x
zas
k
zas
iz
zas
x
zas
k
iz
x
zas
nA
pom
,
x
pom
,
x
G
G
G
U
I
U
I
U
I
U
I
I
I
U
I
R
G
2
2
k
iz
pom
,
x
pom
,
x
G
G
G
G
G
pom
,
x
2
2
2
2
1
1
k
iz
x
x
k
iz
x
G
G
R
R
R
G
G
G
G
pom
,
x
pom
,
x
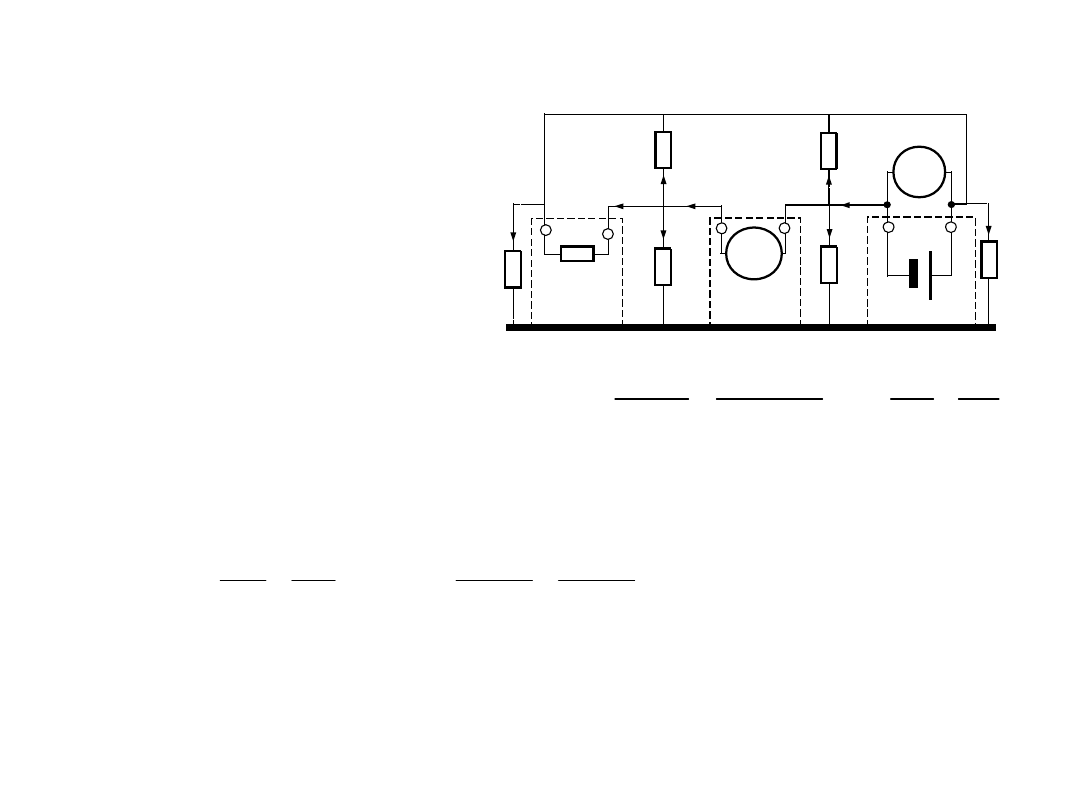
8. Pomiary dużych rezystancji
Prądy przez izolacje I
iz2
=U
zas
/R
iz2
oraz kabel I
k2
=U
zas
/R
k2
powodują powstanie błędu:
R
k2
I
nA
R
x
R
iz2
R
iz1
U
zas
nA
R
k1
I
x
I
zas
I
izU
I
izx
I
k2
I
iz2
I
iz1
I
k1
V
R
izU
R
izx
2
2
k
iz
pom
,
x
pom
,
x
G
G
G
G
G
pom
,
x
2
2
2
2
1
1
k
iz
x
x
k
iz
x
G
G
R
R
R
G
G
G
G
pom
,
x
pom
,
x
Przykład: R
x
=1 GΩ; R
iz2
=R
k2
=10 GΩ=10
10
Ω
%
,
R
R
R
k
iz
x
G
pom
,
x
20
2
0
10
1
10
1
10
1
1
10
10
9
2
2
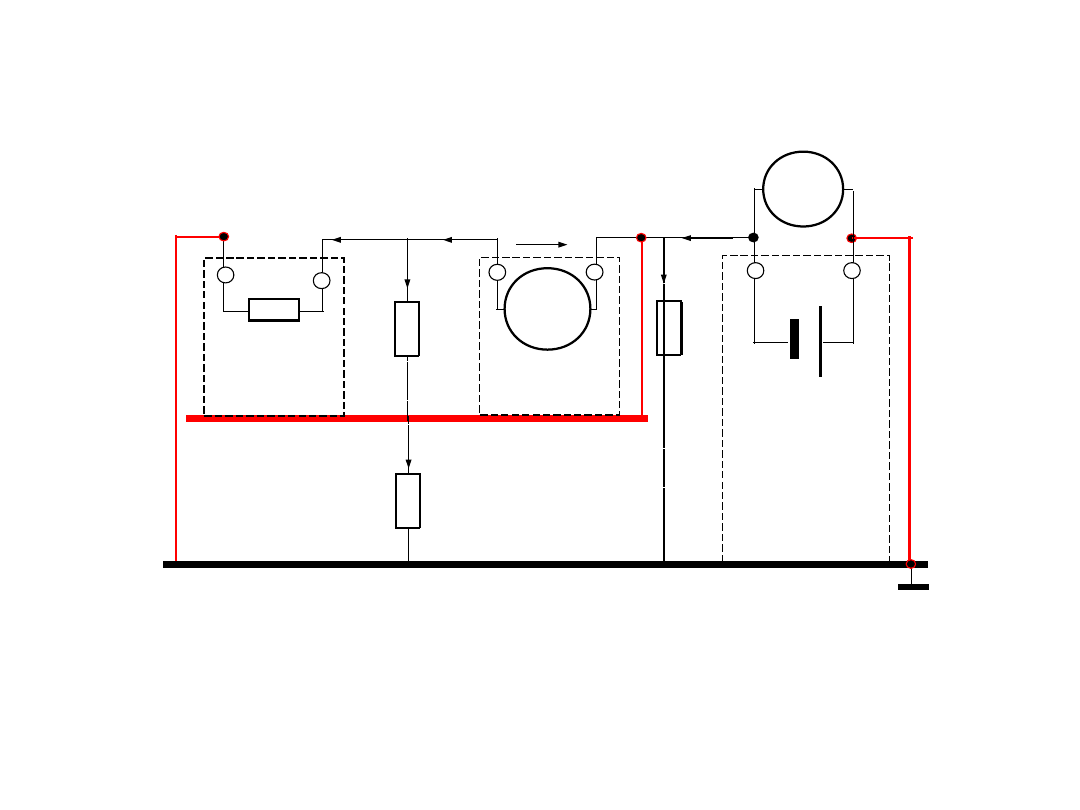
8. Pomiary dużych rezystancji
Rys. zasada ekwipotencjalnego zabezpieczenia podczas
pomiaru dużych rezystancji.
R
iz3
I
nA
R
x
R
iz2
R
iz1
U
zas
nA
I
x
I
zas
I'
iz2
I
iz3
I
iz1
V
U
nA
Ekran ekwipotencjalny
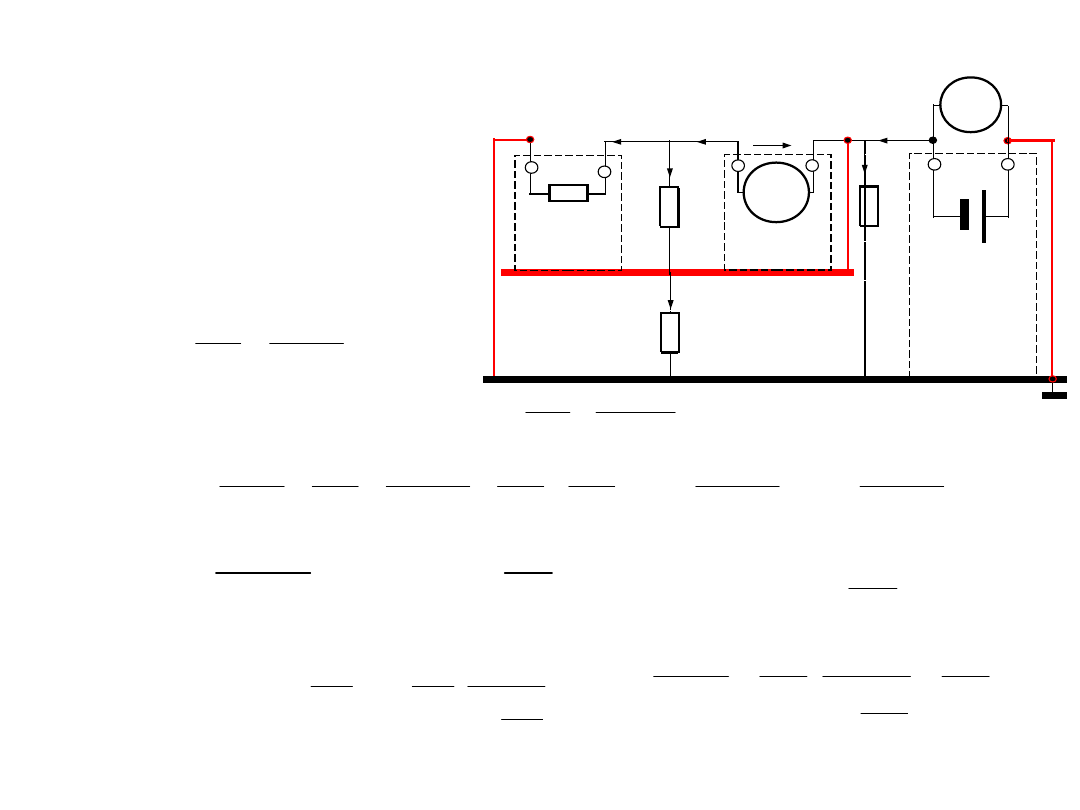
8. Pomiary dużych rezystancji
Wynik pomiaru prądu: I
nA
=I
x
+I'
iz2
Prąd przez izolację
Wynik pomiaru rezystancji:
Błąd
R
iz3
I
nA
R
x
R
iz
2
R
iz1
U
zas
nA
I
x
I
zas
I'
iz2
I
iz3
I
iz1
V
U
nA
Ekran ekwipotencjalny
2
2
2
iz
nA
nA
iz
nA
iz
R
R
I
R
U
I
2
iz
x
zas
nA
zas
pom
,
x
I
I
U
I
U
R
zas
iz
nA
nA
x
zas
iz
nA
x
zas
iz
zas
x
zas
iz
x
zas
nA
pom
x
pom
x
U
R
I
R
G
U
R
U
G
U
I
U
I
U
I
I
U
I
R
G
2
2
2
2
,
,
1
pom
x
iz
nA
x
pom
x
zas
iz
nA
nA
x
pom
x
G
R
R
G
G
U
R
I
R
G
G
,
2
,
2
,
2
,
1
iz
nA
pom
x
x
R
R
G
G
2
2
2
,
,
1
1
,
iz
nA
iz
nA
x
iz
nA
pom
x
x
pom
x
G
R
R
R
R
G
R
R
G
G
G
pom
x
2
2
2
1
1
,
,
iz
nA
iz
nA
iz
nA
x
G
G
R
R
R
R
R
R
G
pom
x
pom
x
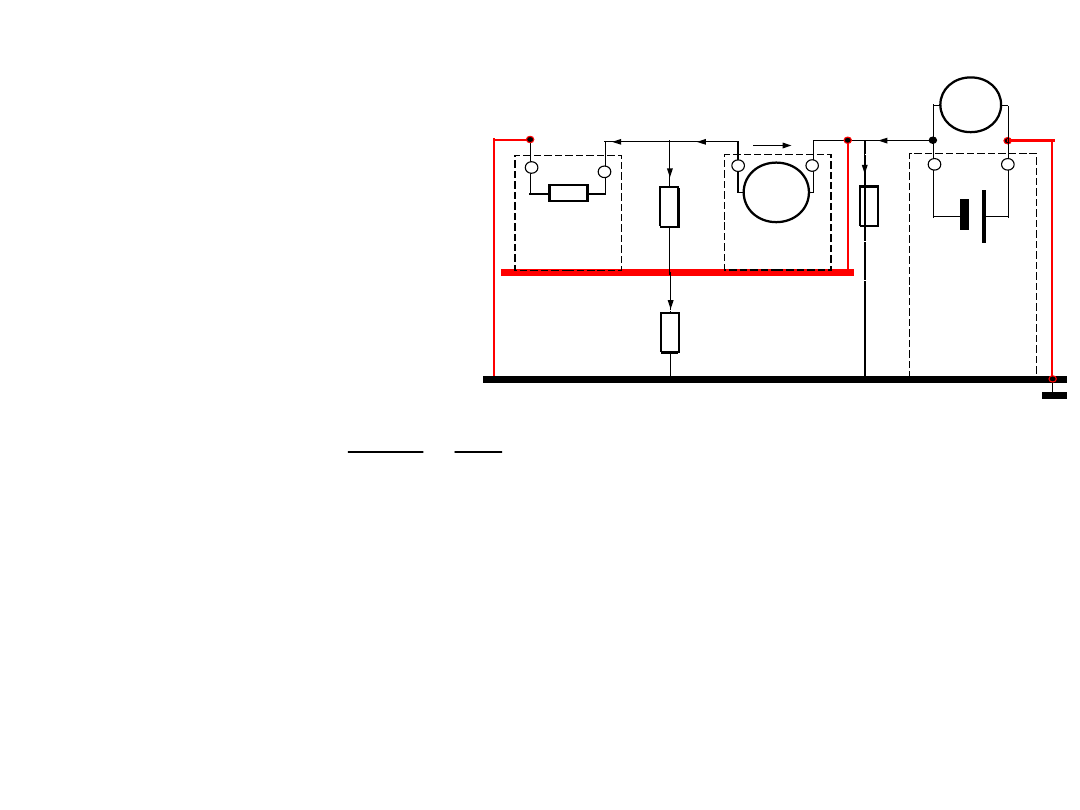
8. Pomiary dużych rezystancji
Błąd
Przykład: R
nA
=1000 Ω; R
iz2
=10 GΩ=10
10
Ω
δ
Gx,pom
≈(1000/10
10
)·100%= 10
-7
= 10
-5
%
R
iz3
I
nA
R
x
R
iz
2
R
iz1
U
zas
nA
I
x
I
zas
I'
iz2
I
iz3
I
iz1
V
U
nA
Ekran ekwipotencjalny
2
,
,
iz
nA
x
G
G
R
R
G
pom
x
pom
x
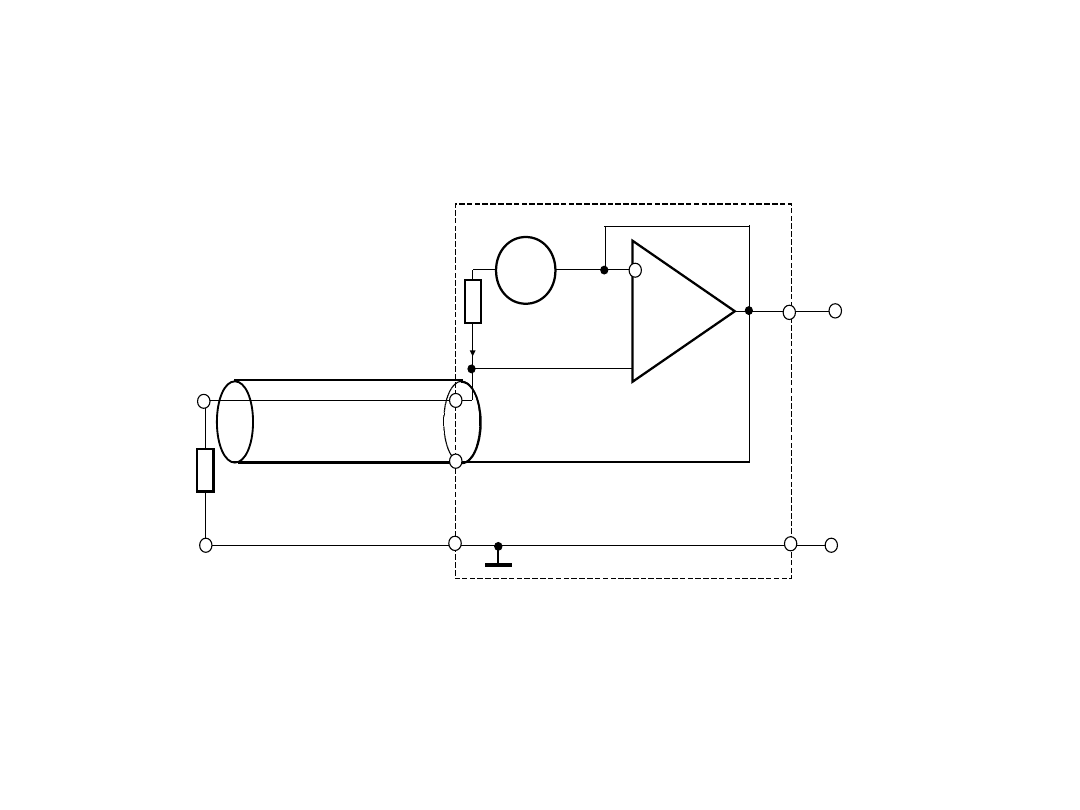
9. Omomierz do pomiaru dużych
rezystancji
Przetwornik rezystancji z ekranowaniem
ekwipotencjalnym
Rys.8. Schemat przetwarzania dużej wartości rezystancji
R
n
WO
-
+
I
x
U
wy
U
ref
R
x
Ekran
ekwipotencjalny
HI
LO
E -Ekran
Do A/C
WY
WE
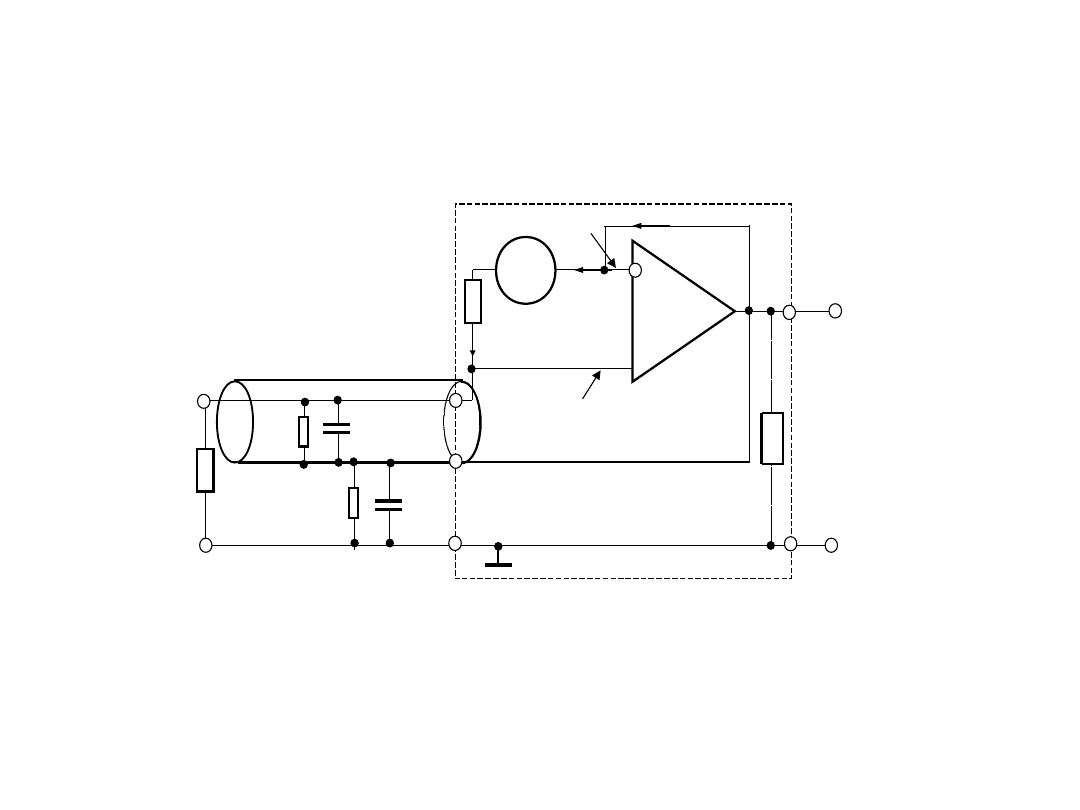
9. Omomierz do pomiaru dużych
rezystancji
- Przetwornik rezystancji z ekranowaniem
ekwipotencjalnym
Rys.8. Schemat przetwarzania dużej wartości rezystancji
R
n
WO
-
+
I
x
=I
n
U
wy
U
ref
I
n
=U
ref
/R
n
R
x
I
n
Ekran
ekwipotencjalny
U
e
=U
wy
=U
-
=U
+
=U
HI
R
iz
R
wy
C
iz
HI
LO
U
HI
E -Ekran
Do A/C
I
we+
=0
I
we-
=0
WY
WE
R
k
C
k

10. Pomiary parametrów izolacji
Podstawowymi obiektywnymi parametrami
materiałów dielektrycznych (izolacji) w stałym
polu elektrycznym są:
rezystywność skrośna ρ
s
oraz
powierzchniowa ρ
p
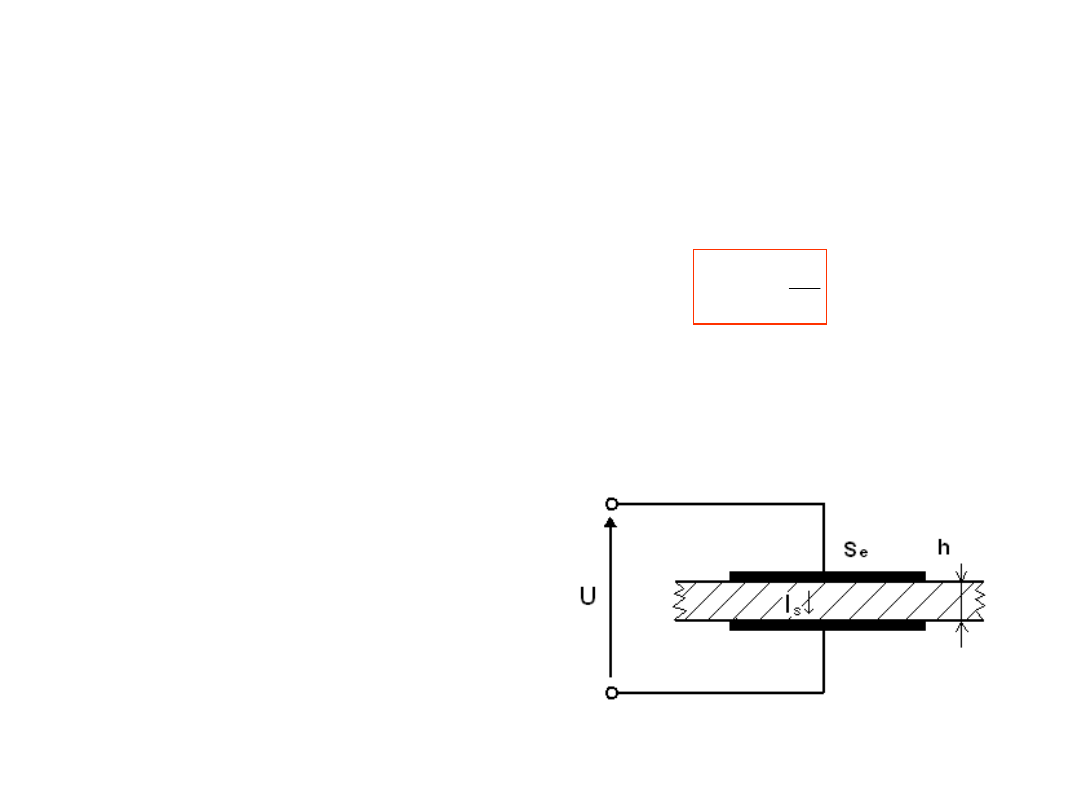
10. Pomiary parametrów izolacji
Rezystywność skrośna ρ
s
odwzoruje własności przepływu prądu
wewnątrz objętości dielektryka umieszczonego pomiędzy dwoma
elektrodami (o zadanej powierzchni), do których doprowadzone
jest napięcie stałe.
Rezystywność skrośna
ρ
s
wyznaczana jest ze wzoru:
[
Ω·m
] lub [
Ω·cm
]
gdzie
R
s
=U/I
s
jest zmierzona wartość rezystancji skrośnej przez
pomiar wartości doprowadzonego do elektrod napięcia
U
oraz
wartość płynącego wewnątrz objętości dielektryka prąd
I
s
;
S
e
jest efektywną powierzchnią elektrod;
h
– jest grubością izolacji (dielektryka).
h
S
R
e
s
s
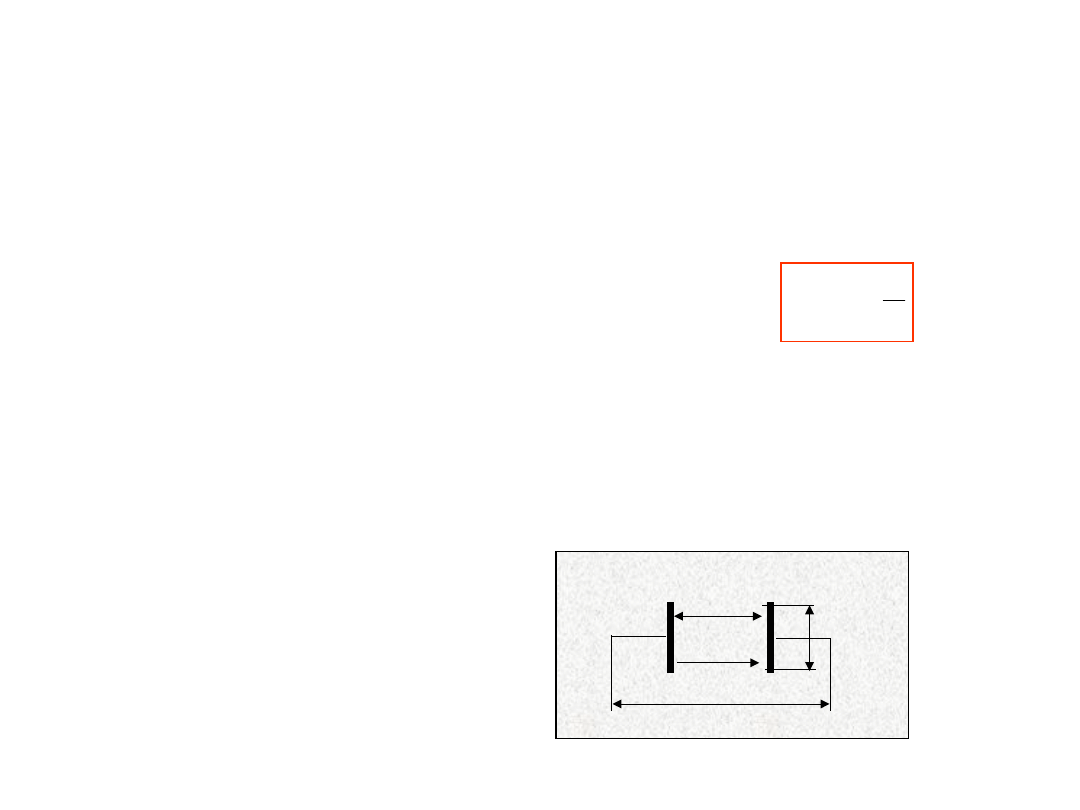
10. Pomiary parametrów izolacji
Rezystywność powierzchniowa ρ
p
odwzoruje własności
przepływu prądu po powierzchni dielektryka pomiędzy dwoma
elektrodami o zadanych wymiarach i odstępie usytuowanymi na
jego powierzchni, do których doprowadzone jest napięcie stałe .
Rezystywność powierzchniowa
ρ
p
wyznaczana jest ze wzoru:
[
Ω
]
gdzie
R
p
=U/I
p
jest zmierzona wartość rezystancji powierzchniowej
przez pomiar wartości doprowadzonego do elektrod napięcia
U
oraz wartość płynącego po powierzchni dielektryka prąd
I
p
;
L
jest odległością pomiędzy elektrodami;
g
– jest odstępem pomiędzy elektrodami
g
L
R
p
p
L
g
I
p
U
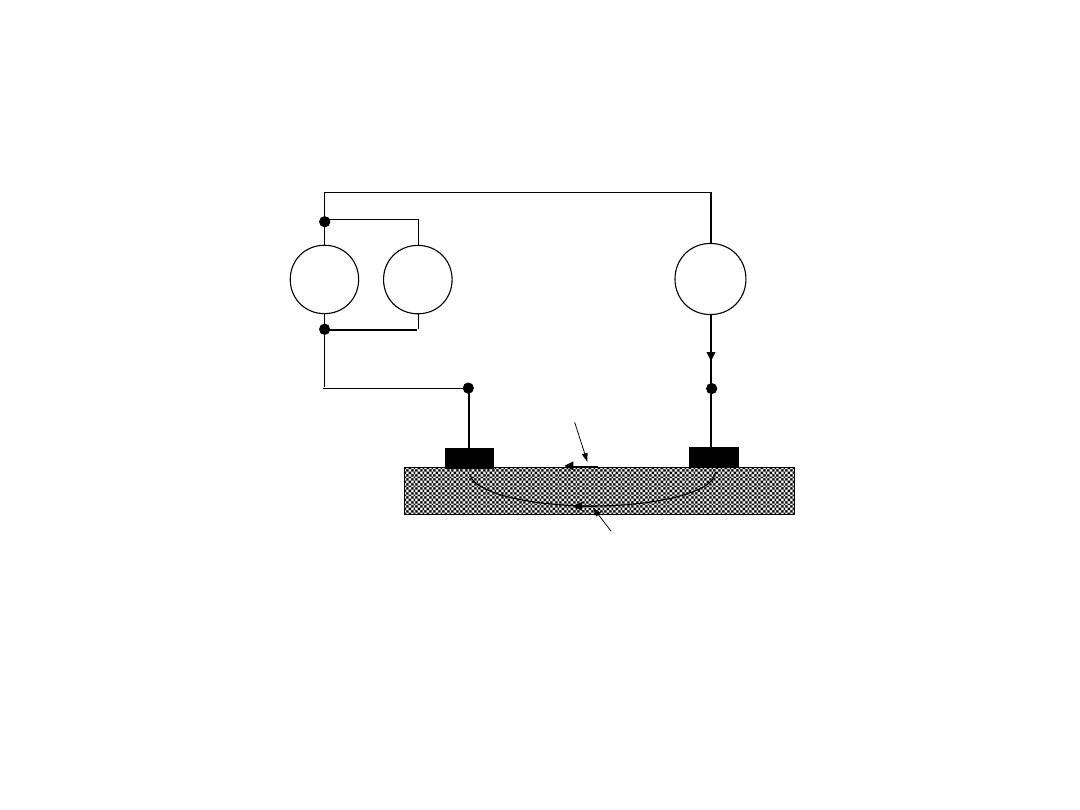
10. Pomiary parametrów izolacji
Przez materiał dielektryczny, do którego za pomocą elektrod
pomiarowych zostało podane napięcie, płyną jednocześnie prądy
wewnątrz jego objętości (
I
s
) oraz po powierzchnie (I
p
).
Dlatego zmierzona wartość rezystancji jest wypadkową rezystancją
skrośnej i powierzchniowej:
I
pom
=I
s
+I
p
.
W celu niezależnego pomiaru rezystancji skrośnej i powierzchniowej (i
dalej odpowiednich rezystywności) wykorzystuje się specjalne
elektrody pomiarowe (komórka pomiarowa)
U
V
μA
2
1
I
pom
I
s
I
p
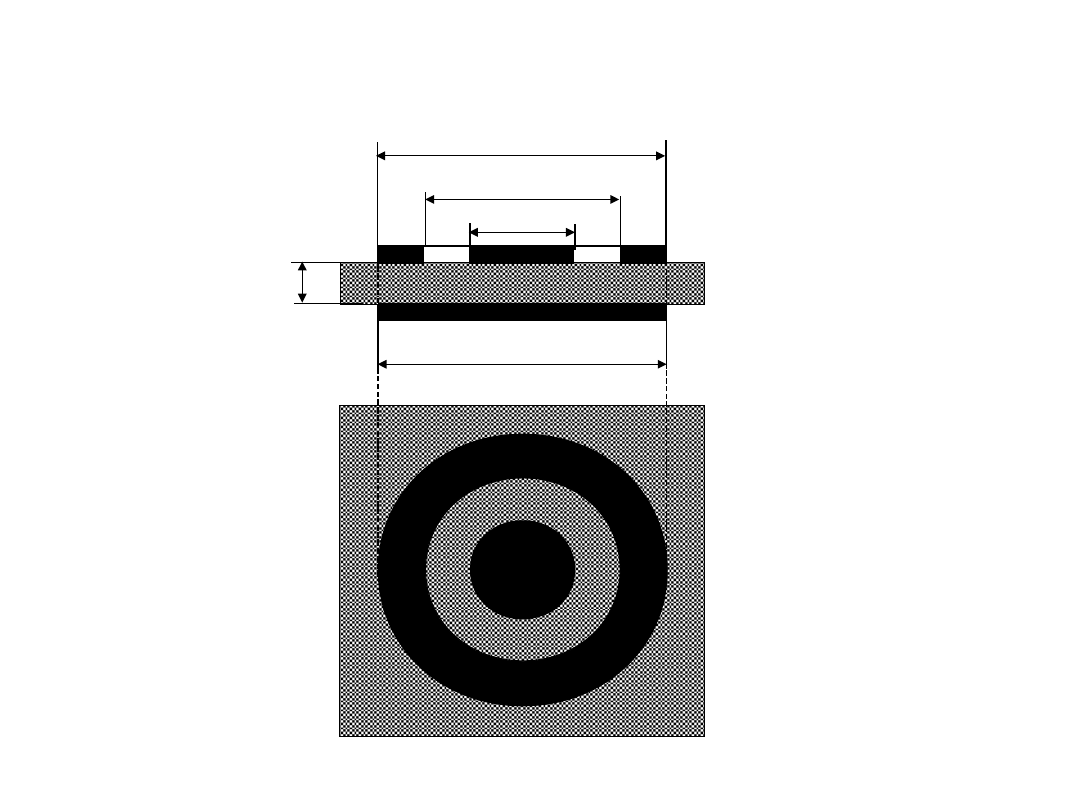
10. Pomiary parametrów izolacji
Układ elektrod pomiarowych (komórka pomiarowa) do niezależnego
pomiaru rezystancji skrośnej i powierzchniowej
d
4
d
3
d
1
d
2
h
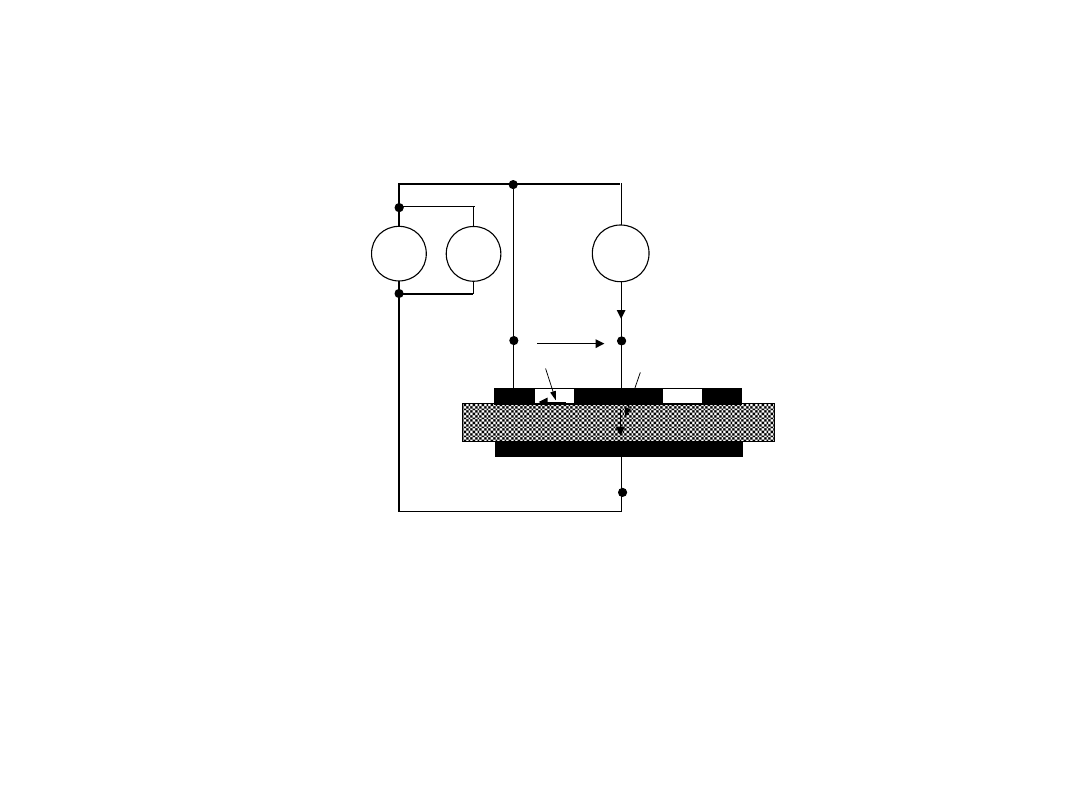
10. Pomiary parametrów izolacji
Pomiar rezystancji i rezystywności skrośnej
2
E
U
V
μ
A
3
1
I
pom
I
s
I
p
U
μA
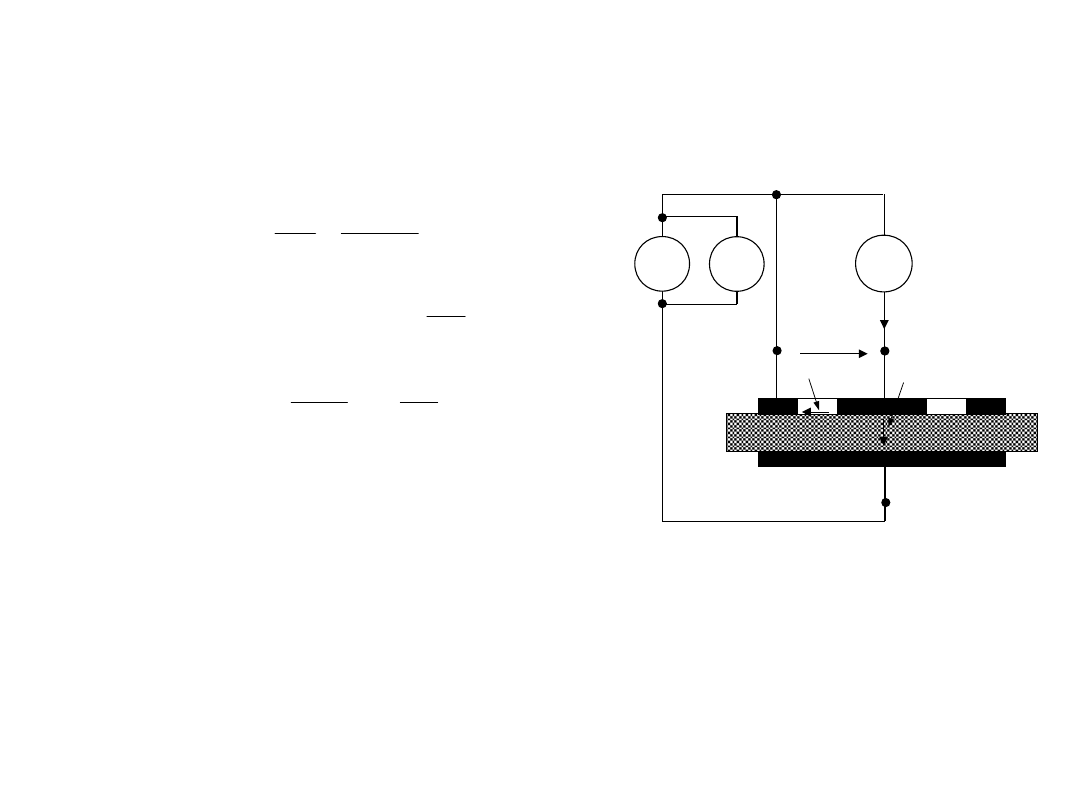
10. Pomiary parametrów izolacji
Pomiar rezystancji i rezystywności skrośnej
Wartość prądu powierzchniowego (powodującego błąd)
Błąd
R
μA
<<R
p
2
E
U
V
μ
A
3
1
I
pom
I
s
I
p
U
μA
p
A
pom
p
A
p
R
R
I
R
U
I
p
A
pom
p
pom
pom
R
R
I
I
I
I
1
p
A
pom
pom
p
pom
R
R
I
I
I
I
1
0
p
pom
I
I
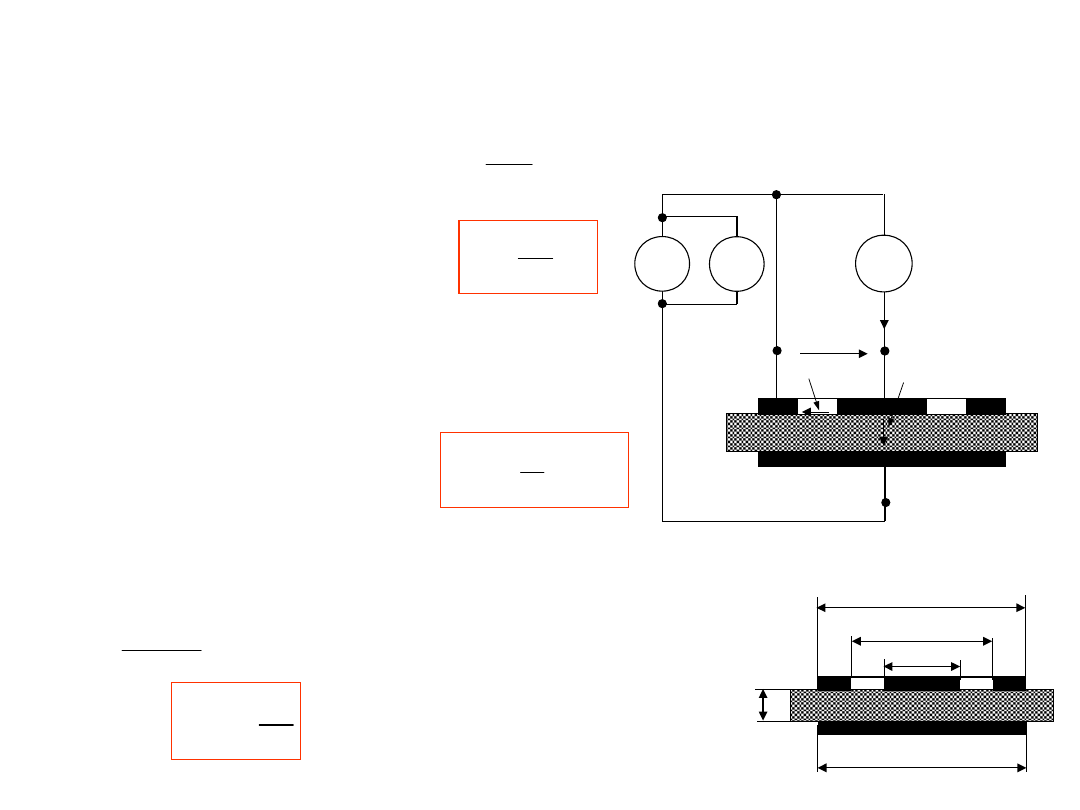
10. Pomiary parametrów izolacji
Pomiar rezystancji i rezystywności skrośnej
Wartość rezystancji skrośnej
Wartość rezystywności skrośnej
Wartość stałej K
s
komórki pomiarowej
z okrągłymi elektrodami pomiarowymi
do pomiaru rezystywności skrośnej ρ
s
wyznaczana jest ze wzoru:
gdzie
B
jest współczynnikiem efektywnej powierzchni elektrody
pomiarowej (można przyjąć
B=0
);
- jest połową odległości
elektrody wewnętrznej i zewnętrznej.
Otóż
2
E
U
V
μ
A
3
1
I
pom
I
s
I
p
U
μA
pom
i
I
U
R
s
s
s
R
h
K
2
1
2
g
B
d
K
s
2
1
2
d
d
g
4
2
1
d
K
s
d
4
d
3
d
1
d
2
h
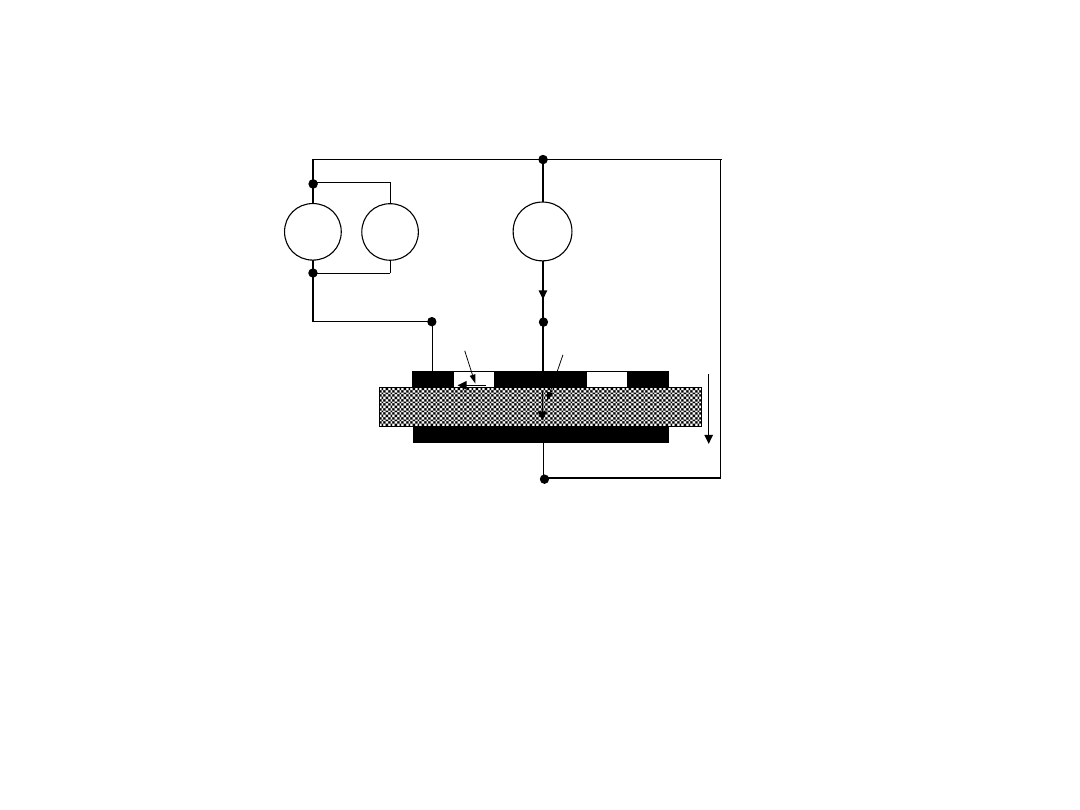
10. Pomiary parametrów izolacji
Pomiar rezystancji i rezystywności powierzchniowej
2
E
U
V
μA
3
1
I
pom
I
s
I
p
U
μA
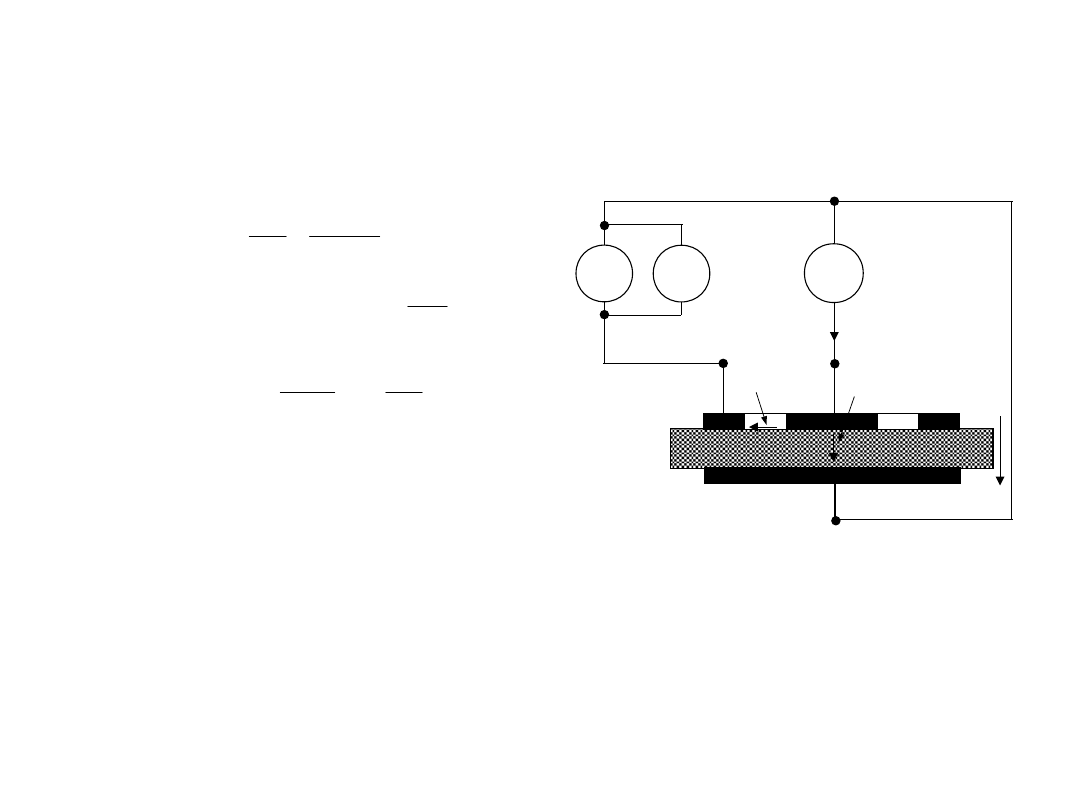
10. Pomiary parametrów izolacji
Pomiar rezystancji i rezystywności powierzchniowej
Wartość prądu skrośnego (powodującego błąd)
Błąd
R
μA
<<R
s
2
E
U
V
μA
3
1
I
pom
I
s
I
p
U
μA
s
A
pom
s
A
s
R
R
I
R
U
I
s
A
pom
s
pom
pom
R
R
I
I
I
I
1
s
A
pom
pom
pom
R
R
I
I
I
1
0
s
pom
I
I
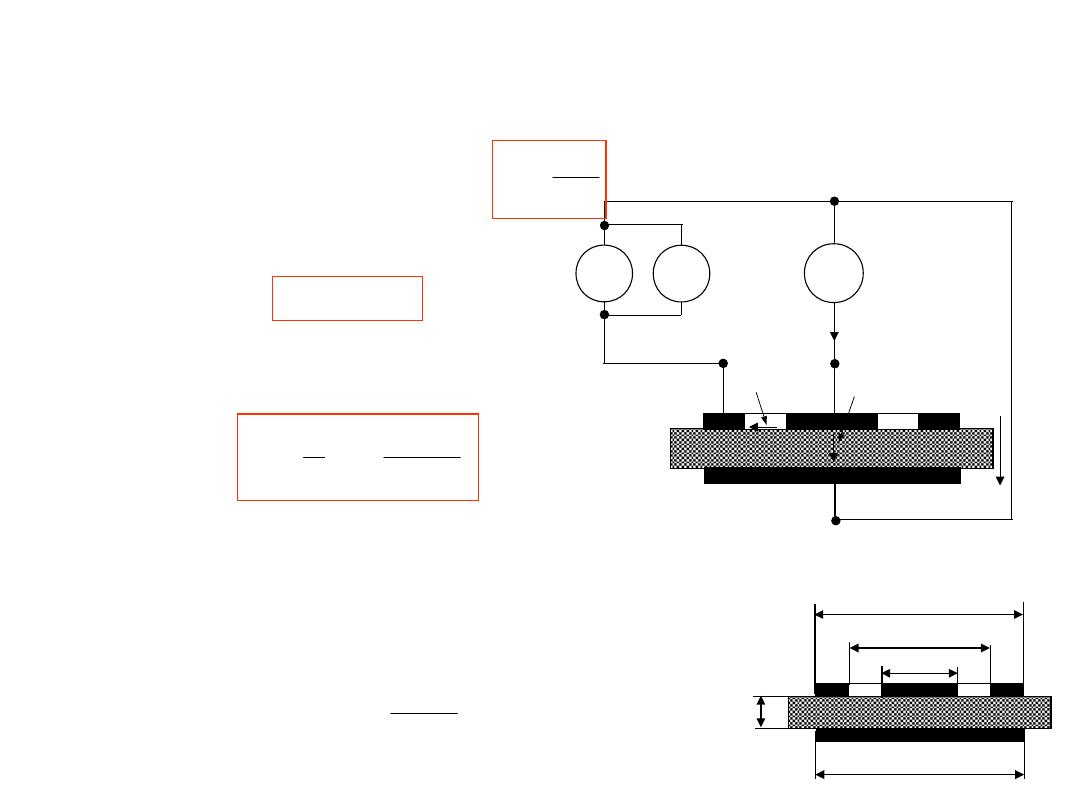
10. Pomiary parametrów izolacji
Pomiar rezystancji i rezystywności powierzchniowej
Wartość rezystancji powierzchniowej
Wartość rezystywności powierzchniowej
Wartość stałej K
p
komórki pomiarowej
do pomiaru rezystywności powierzchniowej
gdzie P jest efektywnym obwodem elektrody ekranującej:
g - jest połową odległości elektrody wewnętrznej i zewnętrznej:
2
E
U
V
μA
3
1
I
pom
I
s
I
p
U
μA
pom
p
I
U
R
p
p
p
R
K
1
2
2
1
d
d
d
d
g
P
K
p
g
d
d
P
1
0
2
1
2
d
d
g
d
4
d
3
d
1
d
2
h

TŁUMIENIE ZAKŁÓCEŃ
W TRAKCIE ICH
PRZENIKANIA W
OBWÓD POMIAROWY

Plan wykładu
Plan:
3.1. Wstęp
3.2. Metody konstrukcyjno-technologiczne
zmniejszenia wpływu zakłóceń
3.2.1. Ekranowanie
3.2.2. Skręcanie par przewodów
3.2.3. Prawidłowe uziemienie
3.2.4. Ekwipotencjalne ekranowanie
3.3. Zabezpieczenie (ekranowanie)
ekwipotencjalne
3.3.1. Niektóry przykłady analizy wpływu
zakłóceń wspólnych
3.3.2. Współczynnik tłumienia zakłócenia
wspólnego
3.3.3. Ekranowanie ekwipotencjalne
Cel:
Zapoznać się z rodzajami zakłóceń w obwodach
pomiarowych
3.1. Wstęp
Zakłócenia, występujące w torze pomiarowym, powodują powstanie
dodatkowej niepewności wyników pomiaru. Przy tym wartość na
niepewności, spowodowanej zakłóceniami, zależy od wielu
czynników. Przy rozpatrywaniu zagadnień wpływu zakłóceń na wyniki
pomiaru należy uwzględniać trzy podstawowe składowe (rys. 1):
-
źródło
zakłóceń;
-
kanał przenikania
zakłócenia w tor pomiarowy oraz
-
obwód pomiarowy
wraz z urządzeniami pomiarowymi i
metodą
przetwarzania
sygnału pomiarowego.
Kanał
przenikania
zakłócenia
-wrażliwość
ξ
z
Źródło
zakłócenia
U
x
Obwód
pomiarowy
U
z
Źródło
sygnału
pomiarowego
Z
z
Wynik pomiaru
X i jego
niepewność
u
z
(Z)
3.1. Wstęp
W ogólnym podejściu niepewność wyniku pomiaru wielkości od wpływu
zakłócenia z zależy od
- jego
intensywności
Z,
- wrażliwości
obwodu pomiarowego na zakłócenie oraz
- operatora
(
algorytmu
) opracowania sygnału:
Dlatego można wyróżnić trzy podstawowe sposoby zwalczania
zakłóceń w układach pomiarowych:
1.
Tłumienie zakłóceń w miejscu ich powstania
(tłumienie „źródła”);
2.
Utrudnienie przenikania zakłóceń
w obwód pomiarowy –
zmniejszenia wrażliwości obwodu na zakłócenia;
3.
Podwyższenie odporności sygnałów
i układów pomiarowych na
zakłócenia
– zmniejszenie skutku oddziaływania zakłócenia.
z
X
z
Z
L
z
Z
z
X
L
Z
L
z
X
u
z
,

3.2. Konstrukcyjno-technologiczne
metody zmniejszenia wpływu zakłóceń
Pierwszy
dwie metody są metodami konstrukcyjno-
technologicznymi
, a
trzecia metoda
jest powiązana z
odpowiednimi odpornym na zakłócenia przetwarzaniami
sygnałów
pomiarowych.
Podstawowymi konstrukcyjno-technologicznymi metodami zwalczania
wpływu zakłóceń są:
-
ekranowanie
oraz
-
prawidłowe uziemienie
,
a dla zmniejszenia przenikania zakłóceń także wykorzystanie
-
skręconych par przewodów linii
.
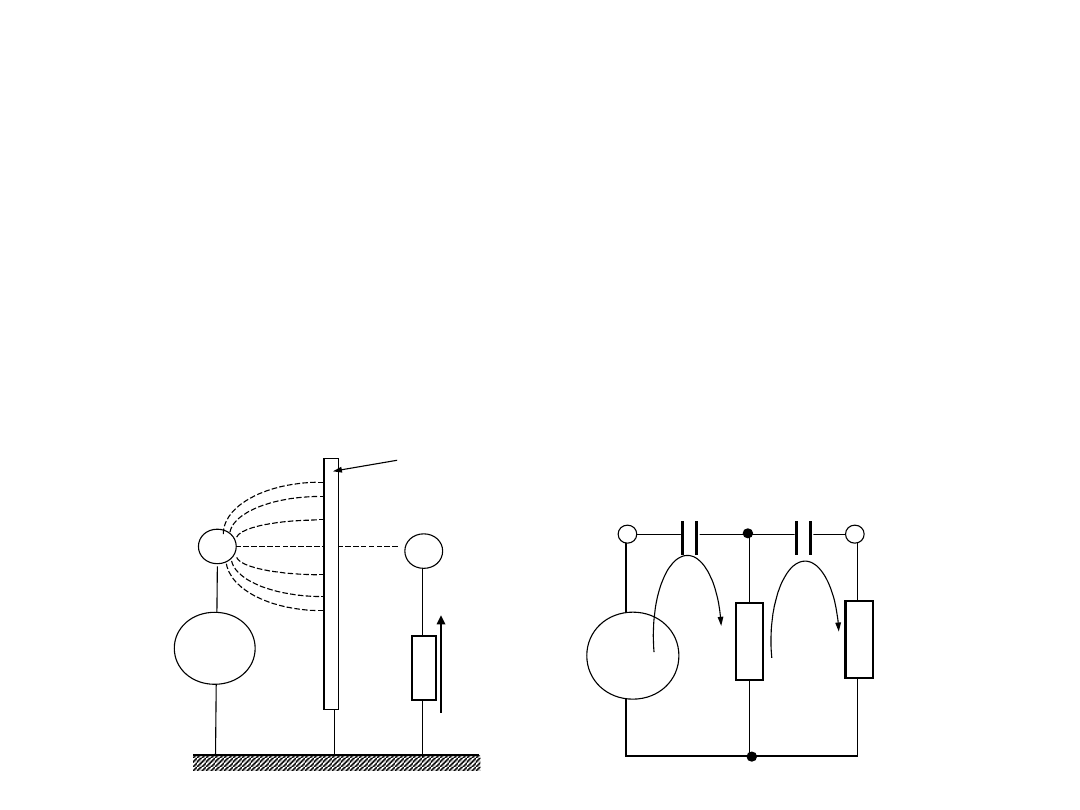
3.2.1. Ekranowanie
W zależności od rodzaju pola elektrostatycznego,
magnetostatycznego i elektromagnetycznego rozróżnia się
ekrany:
• elektrostatyczne
;
• magnetostatyczne
;
• elektromagnetyczne
.
Ekran elektrostatyczny.
Pole elektrostatyczne indukuje na powierzchni ekranu ładunki
elektryczne, na których kończą się linii pola, które
spowodowało powstanie tych ładunków. Przez co pole nie
wnika za ekran.
+
U
e
-
Uz
C
1e
C
e2
Ekran
e
, (r
e
)
C
1e
Uz
U
e
I
1e
1
2
C
e2
I
e2
Z
Z
e
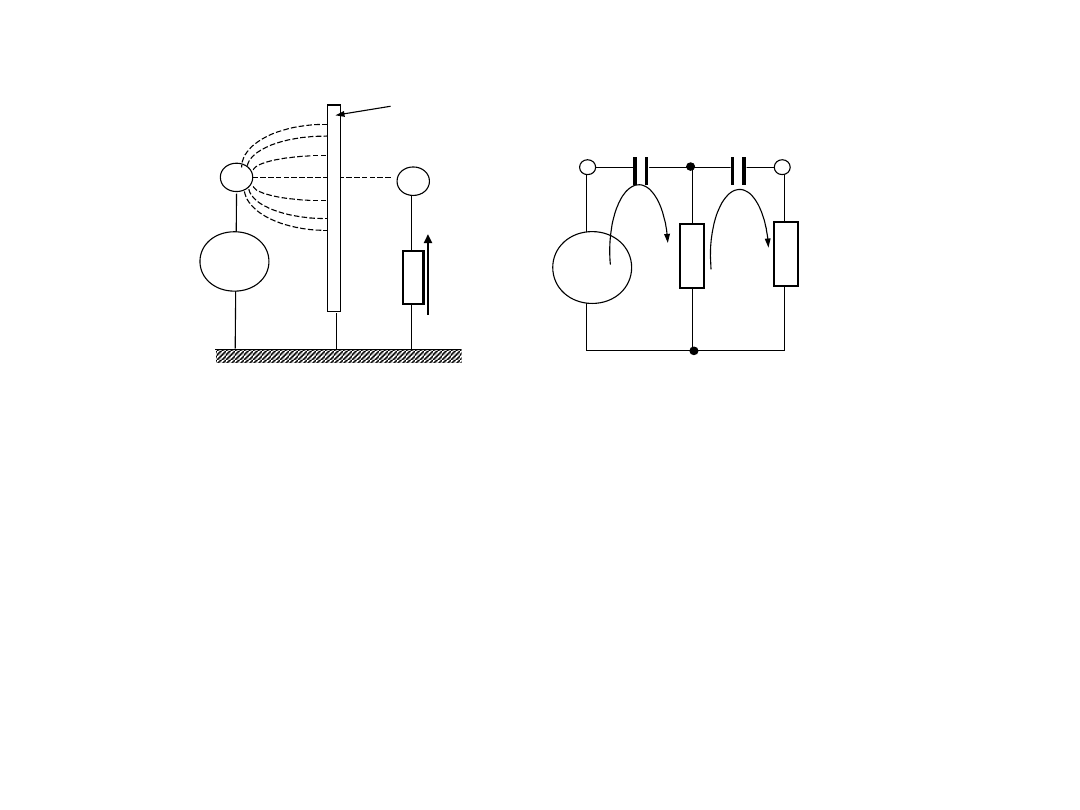
3.2.1. Ekranowanie
Skuteczność ekranu zależy od przewodności materiału ekranu
. Ona musi być
duża (materiał: miedź, aluminium, srebro, złoto, itp.).
Przy obecności ekranu prąd I
e1
płynąc będzie tylko w obwodzie źródło –
pojemność pasożytnicza C
e1
– ekran, powodując napięcie na rezystancji na
ekranie (gdzie uwzględniono, że rezystancja ekranu jest w dużym stopniu
mniejsza impedancją pojemności C
e1
(r
e
<<1/
C
e1
).
Napięcie U
ez
jest źródłem wtórnego prądu płynącego przez pojemność
pasożytnicza C
e2
do impedancji wejściowej Z, wywołując na niej napięcie
zakłócające , gdzie C
e
=C
e1
C
e2
.
Przykładowo, dla Us=230V, f=50Hz; C
e
=25pF (zwiększenie pojemności wskutek
zwiększenia powierzchni ekranu); r
e
=2,5, Z=1M wartość napięcia
zakłócenia wynosi około U
z
0,035 V.
Skuteczność ekranowania zależy od przewodności materiału ekranu i jej
zmniejszenie powoduje pogorszenie skuteczności ekranowania. Ekran może
być jako siatka
.
+
U
ez
-
Uz
C
1e
C
e2
Ekran
e
, (r
e
)
C
1e
Uz
U
ez
I
1e
1
2
C
e2
I
e2
Z
Z
e
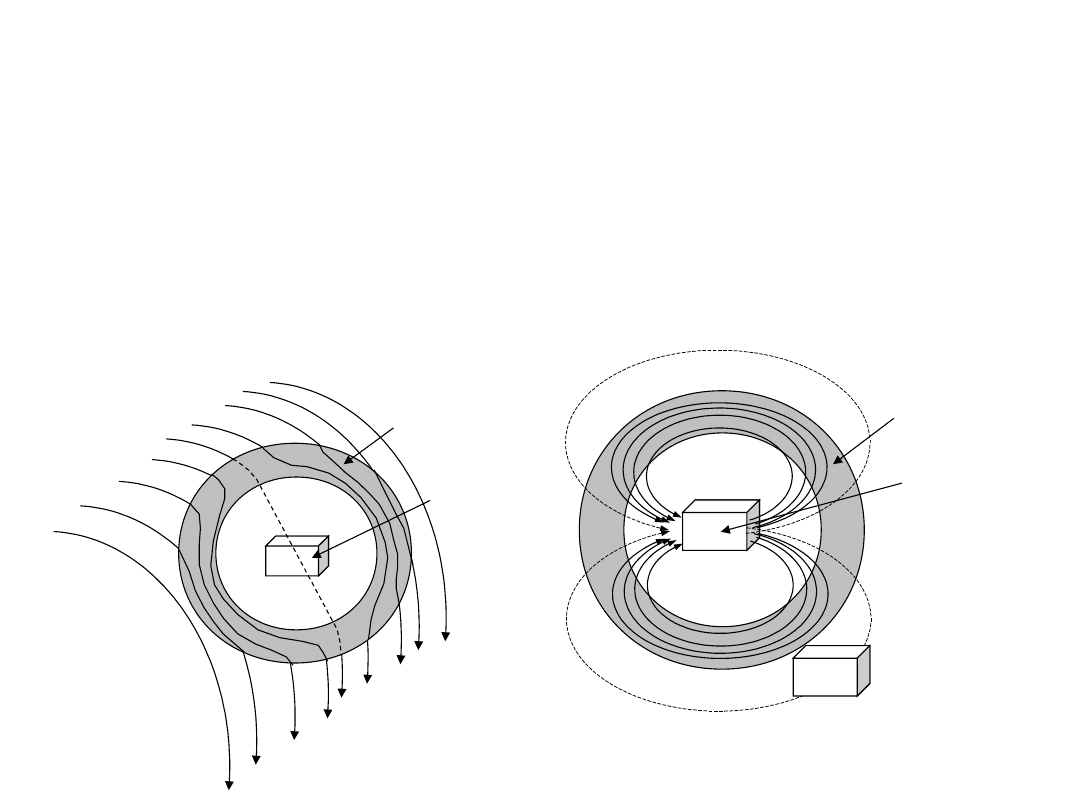
Magnetostatyczne ekranowanie
Linii pola magnetostatycznego trafiając na ekran z materiału
ferromagnetycznego wnikają weń i zbierają się w materiale
ekranu malejąc wewnątrz niego.
Ekranowany może być obwód pomiarowy (a) lub źródło
zakłócenia (b).
Skuteczność takiego ekranu tym większa im mniejszy opór
magnetyczny ekranu (im większa przenikalność magnetyczna
i grubość ekranu).
Ekran musi być jednolity, bez dziur.
Ekran
magnetycz
nyUkład
pomiarow
y
Pole
magnetostatyc
zne zewnętrzne
Ekran
magnetyczny
Układ
pomiarowy
Źródło zakłócenia
magnetycznego
wewnętrznego
Ekranowanie elektromagnetyczne
Pole elektromagnetyczne (EMP) zwykle przyjmuje się zmiennym sinusoidalnym,
ono powoduje powstanie siły elektromotorycznej (EMS) oraz prądów
wirowych w materiale przewodzącym.
Te prądy wywołując pole magnetyczne, które przeciwdziała polu zewnętrznemu.
Efektywność ekranu zależy od przewodności i przenikalności magnetycznej
materiału, grubości ekranu oraz długości fali (częstotliwości) EMP
Przenikalność EMP, mm
Grubość ekranu musi być co najmniej równa trzykrotnej głębokości wnikania fali
elektromagnetycznej.
Wymiary szczelin i dziur w ekranie też muszą być kilka razy mniejszymi od
długości fali elektromagnetycznej. Im większa częstotliwość EMP tym cieńszy
wymagany jest ekran.
Częstotliwoś
ć, Hz
Miedź Aluminium
Stal
50
9
11.5
0.91
100
6.6
8.5
0.66
1000=1kHz
2.1
2.7
0.20
10000=10k
Hz
0.66
0.84
0.08
100000=1M
Hz
0.08
0.08
0.008

Rekomendacje
Jeżeli obudowa przyrządu pomiarowego jest zrobiona z tworzywa wtedy
jako ekran może się wykorzystywać zewnętrzne przewodzące pokrycia
obudowy.
Dla zapewnienia zmniejszenia wpływu pól różnego rodzaju na praktyce
często stosuje się wielu warstwowe ekrany z różnych materiałów.
W niektórych przypadkach mogą być ekranowany każdy element układu
pomiarowego lub najważniejszy jego podzespoły.
W takich przypadkach ekrany powinny być dołączone do masy lub punktu
odniesienia
Rekomendacje [ZwAE]:
-
Ekran elektrostatyczny
: wysoka przewodność materiału, może być jako
siatka.
-
Ekran magnetostatyczny
: wysoka przenikalność materiału, musi być bez
dziur lub z niewielkimi dziurami. Dla zwiększenia skuteczności ekran
może być kilku warstwowym.
-
Ekran elektromagnetyczny
: efektywność ekranu zależy od przewodności i
przenikalności magnetycznej materiału, grubości ekranu oraz długości
fali (częstotliwości) EMP. Grubość ekranu musi być co najmniej równa
trzykrotnej głębokości wnikania fali elektromagnetycznej.
- Dla zapewnienia zmniejszenia wpływu pól różnego rodzaju na praktyce
często stosuje się
wielu warstwowe ekrany
z różnych materiałów.
3.2.2.Tłumienie pola
magnetycznego przez skręcanie
par przewodów
Pole zmienne magnetyczne o indukcyjności B powoduje powstanie w
obwodzie o powierzchnie S siły elektro motorycznej
gdzie Ф – jest strumień magnetyczny, B – jest gęstość strumieniu
magnetycznego. To znaczy, że wpływ zmiennego pola
magnetycznego jest proporcjonalny do powierzchni obwodu.
Dla zmniejszenia wpływu takiego pola należy unikać pętli przewodów
oraz długich dwu przewodowych kabli.
dt
dB
S
dt
d
e
B
S
e
B
=-SdB/dt
B
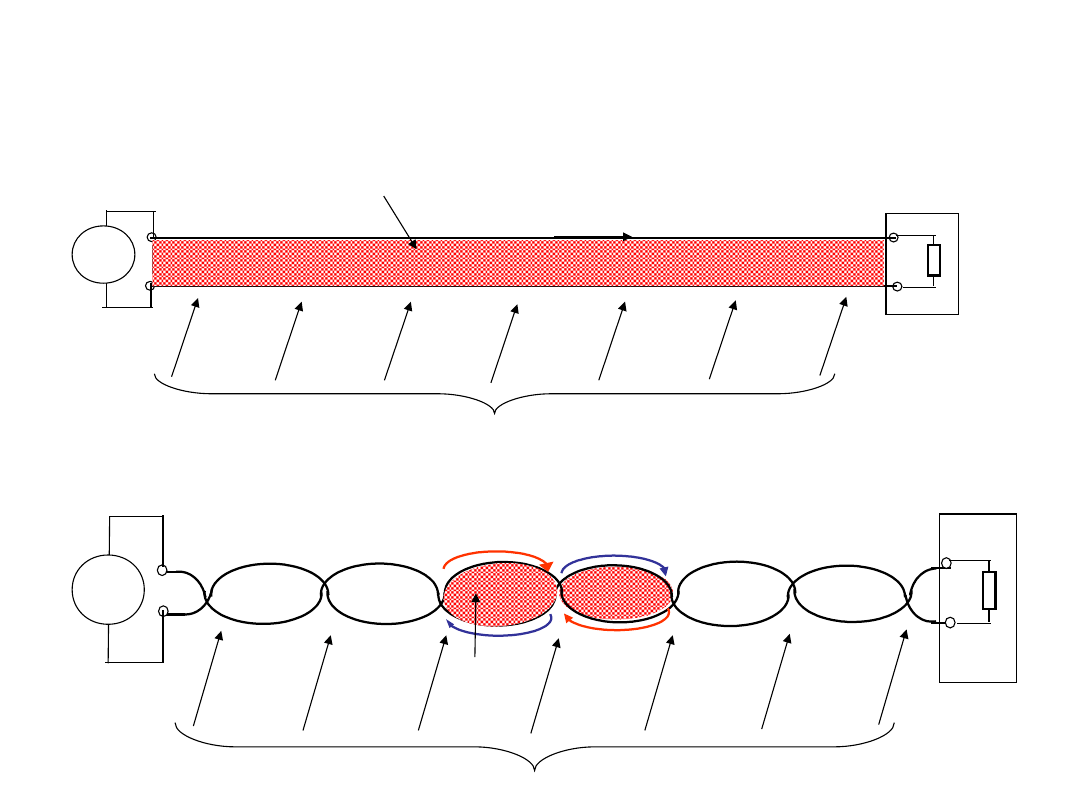
3.2.2.Tłumienie pola
magnetycznego przez skręcanie
par przewodów
Skutecznym przeciwdziałaniem wpływu pola magnetycznego jest
skręcanie par dwu przewodowych kabli
S
p
e
z
=S
dB/dt
Z
we
U
z
B
e
B
=-
SdB/dt
S
S
i
e
zi
=S
i
dB/
dt
Z
we
U
z
B
e
zi+1
=-
S
i+1
dB/dt
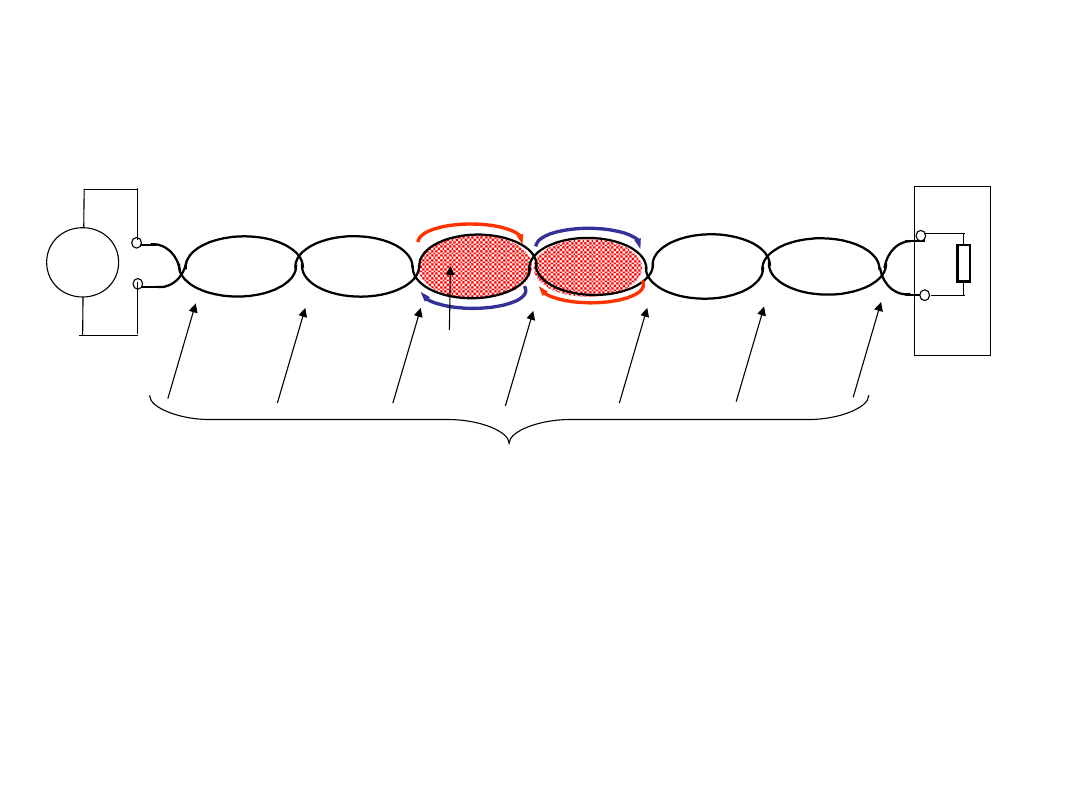
3.2.2.Tłumienie pola
magnetycznego przez skręcanie
par przewodów
Rekomendacje:
-
Unikać długi kabli
-
Unikać pętli
-
Separować linii zasilania
od linii sygnałów pomiarowych
- Wykorzystanie skręconych par przewodów
Efektywność skręcania zależy od jednakowości powierzchni
pętli, liczba pętli musi być dużą i parzystą.
S
i
e
zi
=S
i
dB/
dt
Z
we
U
z
B
e
zi+1
=-
S
i+1
dB/dt
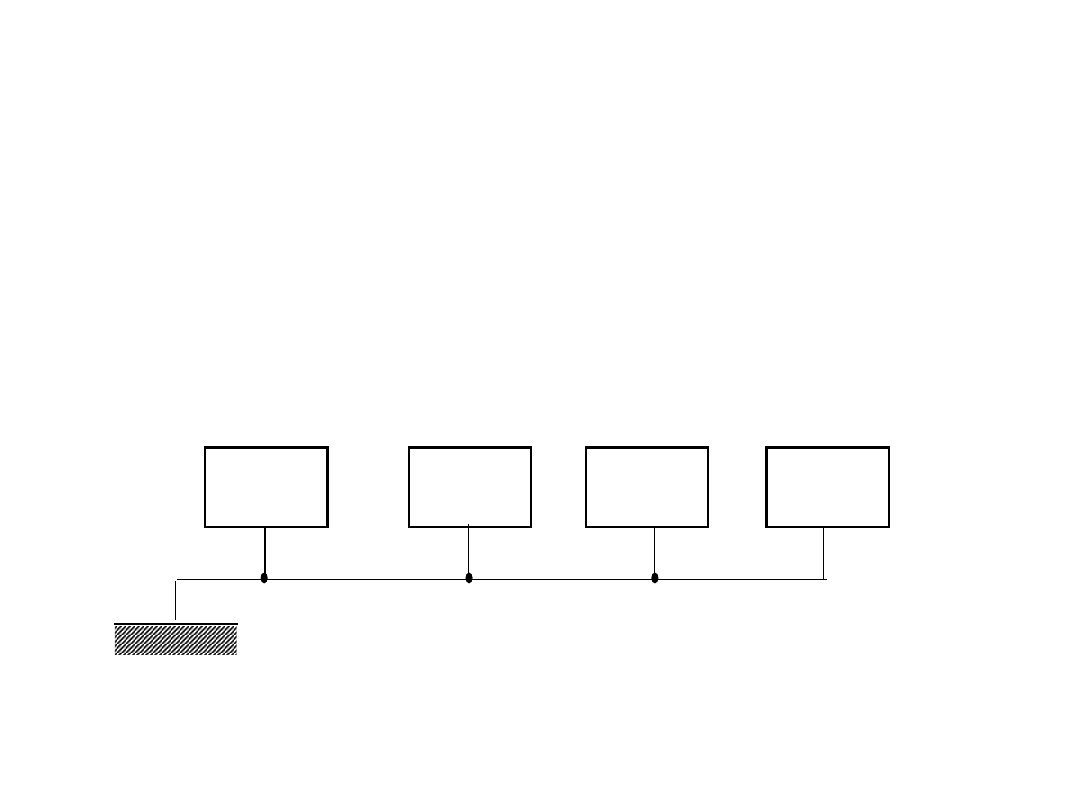
3.2.3. Uziemienie
Dla prawidłowej transmisji, przetwarzania i wykorzystania sygnałów
pomiarowych elektrycznych wymaganie jest istnienie punktów lub
płaszczyzn ekwipotencjalnych (stałych w czasie i niezależnych od
przepływających prądów).
Te punkty lub płaszczyzny odniesienia w danym układzie, zespole lub
systemie pomiarowym stanowią tzw. masę.
Nazywa się ona również uziemieniami dla sygnałów pomiarowych.
W praktyce płaszczyzny odniesienia posiada niezerową impedancją
(rezystywnością) (zależną od materiału, jej długości, szerokości i
grubości oraz częstotliwości sygnałów) i dla tego płaszczyzna
odniesienia przy obecności przepływających prądów nie jest
ekwipotencjalną.
W takiej sytuacji przy dołączeniu źródła sygnału oraz odbiornika do takiej
płaszczyzny w dostatecznych odległych punktach pomiędzy tymi
punktami powstaje różnica potencjałów, która powoduje blendy
transmisji (przetwarzania) sygnału pomiarowego.
Układ 1
Układ 2
Układ 3
Układ 4
Masa
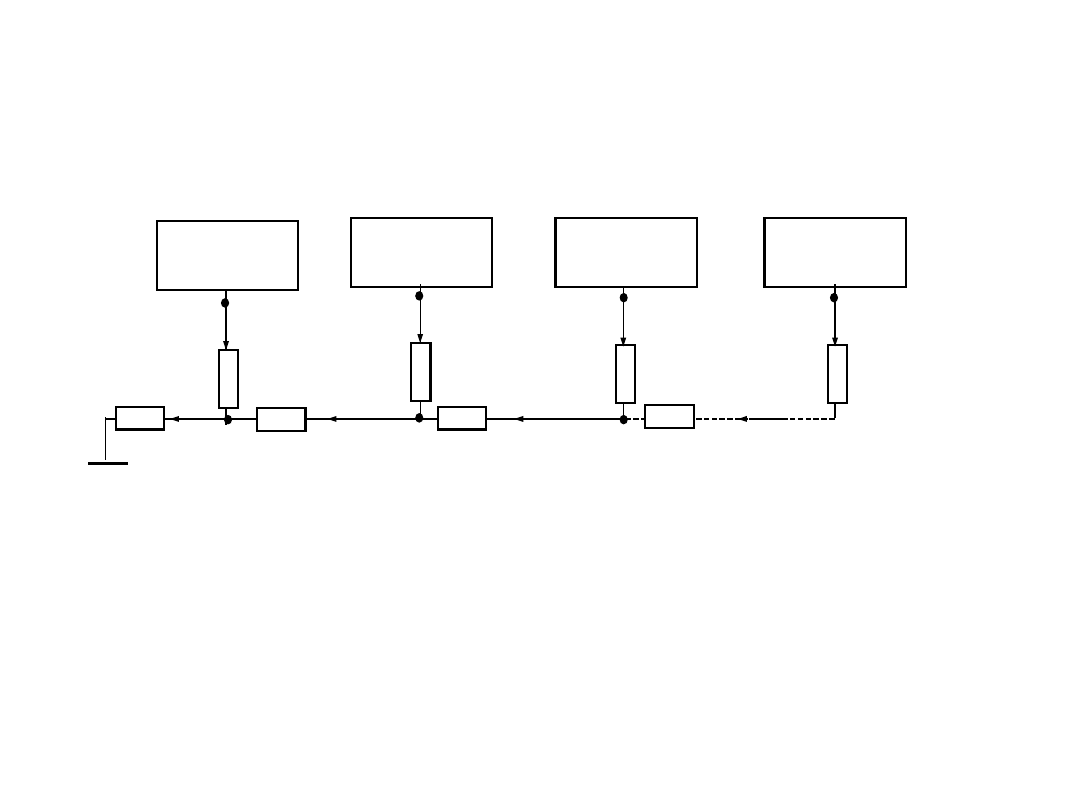
3.2.3. Uziemienie
Przykładem powstania nieekwipotencjalności jest uziemienie
jedno punktowe szeregowe, układ zastępczy jest pokazany
niżej.
Własny potencjał odniesienia pierwszego układu wynosi:
gdzie
- potencjał punkcie w pierwszym punkcie uziemienia.
Podobnie, własne potencjały odniesienia drugiego i trzeciego
punktów wynoszą:
Układ 1
Układ 2
Układ 3
Układ n
I
un
I
u1
I
u2
I
u3
Z
zn
Z
z1
Z
z2
Z
z3
U
1
U
2
U
3
U
n
Z
01
Z
02
Z
03
Z
0n
I
3
I
2
I
n
I
1
U
01
U
02
U
03
U
0n
1
1
1
01
z
u
Z
I
U
U
01
3
2
1
01
1
1
...
Z
I
I
I
I
Z
I
U
un
u
u
u
2
2
2
02
z
u
Z
I
U
U
3
3
3
03
z
u
Z
I
U
U
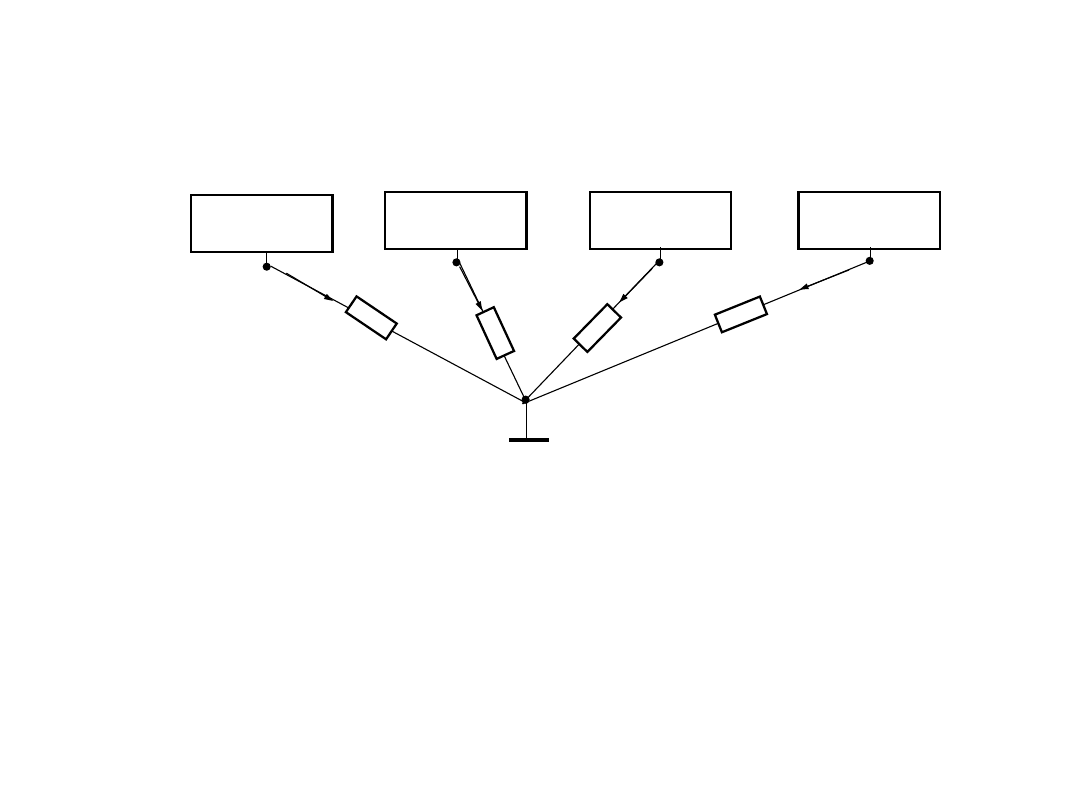
3.2.3. Uziemienie
Dla uniknięcia wzajemnych wpływów prądów od różnych
układów należy wykorzystać jednopunktowe uziemienie
równoległe
Przy takim uziemieniu potencjały odniesienia układów (U
01
, U
02
, U
03
,...,
U
0n
) są zależny tylko od wartości własnych prądów oraz rezystancji
uziemienia (Z
z1
, Z
z2
, Z
z3
,..., Z
zn
).
Mogą być stosowane jednopunktowe uziemienia mieszane (szeregowo-
równolegle).
Układ 1
Układ 2
Układ 3
Układ n
I
un
I
u1
I
u2
I
u3
Z
zn
Z
z1
Z
z2
Z
z3
U
01
U
02
U
03
U
0n
3.2.3. Uziemienie
Należy pamiętać że rezystancja uziemienia zależy nie tylko od
materiału i wymiarów geometrycznych (szerokość, długość, grubość)
jednak także w dużym stopniu od częstotliwości (długości fali)
sygnałów w danym obwodzie pomiarowym.
Przy stosunkowo małych (w porównaniu do długości fali)
odległościach pomiędzy punktami płaszczyzny
(L/<1/20=0.05) wartość impedancji równa się:
, [/],
gdzie R
DC
, [/] - rezystancja powierzchniowa dla prądu stałego;
k=R
RF
/R
DC
– współczynnik, wyrażający stosunek rezystancji na
prądzie zmiennym oraz stałym.
Przy L/=1/8=0,125 wartość impedancji równa się:
, [/].
A przy L/>1/8=0,125 wartość impedancji może mieć znacznie
większe wartości.
W
L
R
k
Z
DC
W
L
R
k
Z
DC
2
3.2.3. Uziemienie
Przykładowo, dla płaszczyzny odniesienia (uziemienia)
wykonanej z miedzi przy L0,5 m, szerokości W5 mm,
częstotliwości f100 kHz (3 km) obliczamy [/],
L/=0.1710
-3
<1/20, dla tego
Taka sama płaszczyzna wykonana ze stali (
w
1000,
w
0.1) ma
impedancję o wartości 100 razy większą.
Przy częstotliwości powyżej 10 MHz oraz dużej odległości
układów od wspólnego punktu uziemienia może okazać się że
niektóre z rezystancji uziemienia (Z
z1
, Z
z2
, Z
z3
,..., Z
zn
) są duże
(wzrost długości powoduje wzrost wpływu składowej
indukcyjnościowej) .
m
W
L
R
Z
RF
22
.
8
005
.
0
/
5
.
0
10
22
.
8
5
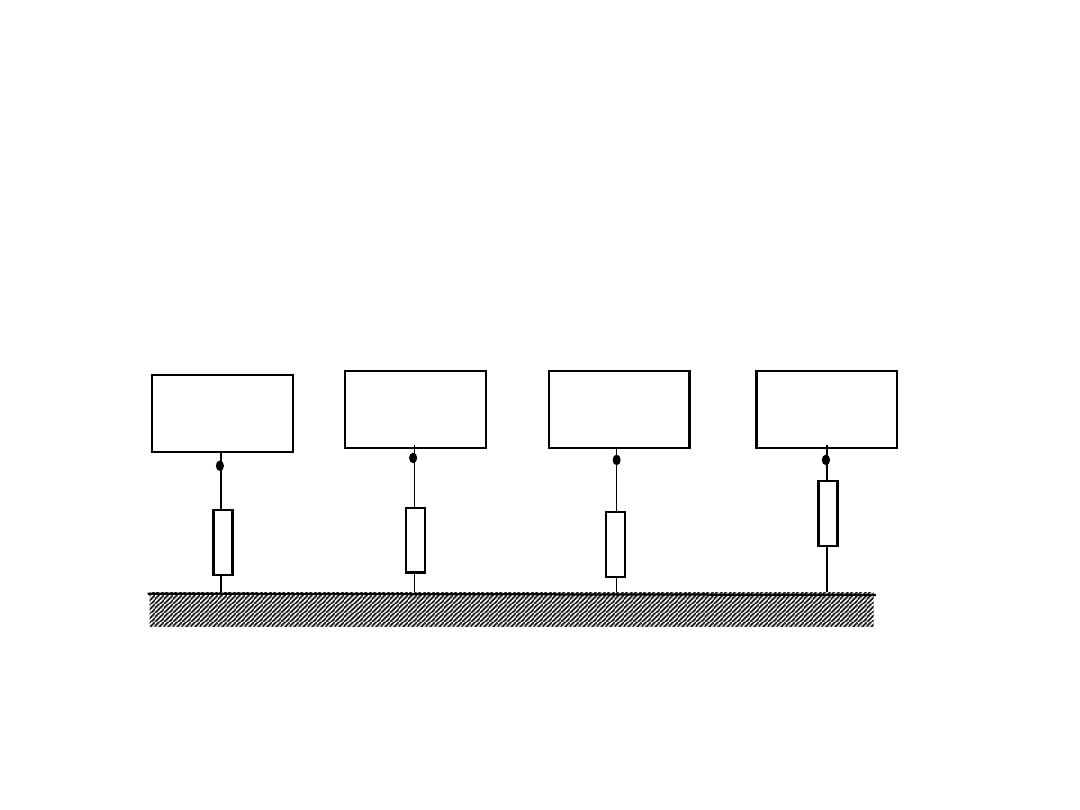
3.2.3. Uziemienie
W takich przypadkach jest rekomendowane uziemienie
wielopunktowe.
Przy tym płaszczyzny uziemienia obecnie są wykonywane z
cienkiej warstwy srebra lub nawet złota pokrywającej
praktycznie w całości elementy konstrukcyjne (tak zwane
chassis) układu.
Uziemienie jest wykonywane krótkimi przewodami o malej
indukcyjności.
Układ 1
Układ 2
Układ 3
Układ n
Z
zn
Z
z1
Z
z2
Z
z3
Chassi
s

3.2.3. Uziemienie
Dla zapewnienia skuteczności uziemienia w szerokim zakresie
częstotliwości wykorzystuje się uziemienie kombinowane:
jednopunktowe dla składowych niskoczęstotliwościowych,
oraz przez kondensatory (o pomijalnie małych
indukcyjnościach wyprowadzeń) wielopunktowe do chassis.
Rekomendacje:
- W realizacjach praktycznych systemów
pomiarowych powinny być przewidywane co
najmniej
trzy oddzielne systemy uziemienia
:
dla
sygnałów
(obwodów)
analogowych pomiarowych
;
dla
sygnałów
(obwodów)
cyfrowych
;
dla
uziemienia ochronnego
,
które mogą mieć połączenie tylko w jednym punkcie
.

3.2.3. Uziemienie
Dla zapewnienia skuteczności uziemienia w szerokim zakresie
częstotliwości wykorzystuje się uziemienie kombinowane:
jednopunktowe dla składowych niskoczęstotliwościowych, oraz
przez kondensatory (o pomijalnie małych indukcyjnościach
wyprowadzeń) wielopunktowe do chassis.
Rekomendacje:
-
Rezystancja przewodów oraz warstw uziemiających
zależy od ich materiału i parametrów
geometrycznych oraz częstotliwości sygnałów
.
-
W zakresie małych częstotliwości (do ok. 1 MHz)
rekomenduje się uziemienie jednopunktowe
równoległe.
-
W zakresie dużych częstotliwości (powyżej ok.
10 MHz) rekomenduje się uziemienie wielopunktowe
krótkimi przewodami do płaszczyzny odniesienia w
postaci cienkiej warstwy srebra
lub nawet złota
pokrywającej praktycznie w całości elementy
konstrukcyjne (tak zwane chassis) układu.
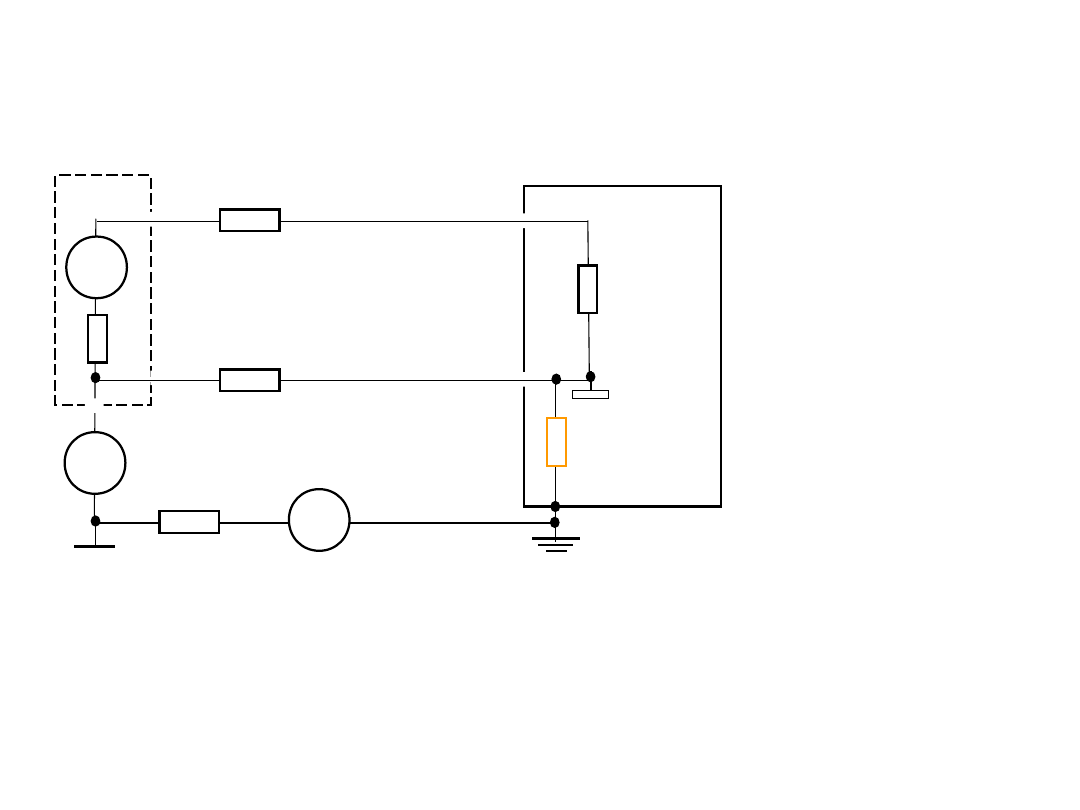
3.3. Zabezpieczenie (ekranowanie)
ekwipotencjalne
3.3.1.Typowe połączenie obiektu oraz narzędzi
pomiarowego
• R
x
- rezystancja źródła sygnału,
• R
l1
, R
l2
- rezystancja przewodów,
• R
we
- rezystancja wejściowa odbiornika sygnału
• R
iz
– rezystancja izolacji pomiędzy wejściami sygnałowymi i
obudową przyrządu
R
l2
R
we
U
x
R
iz
Układ 2
R
z
R
l1
ZU
ZŹ
ZO
R
x
Układ 1
U
cm
U
z
ZU – “ziemia” układu
ZO – “ziemia” odbiornika
ZŻ – “ziemia” źrudła
U
cm
– napięcie wspólne
U
z
– napięcie uziemienia
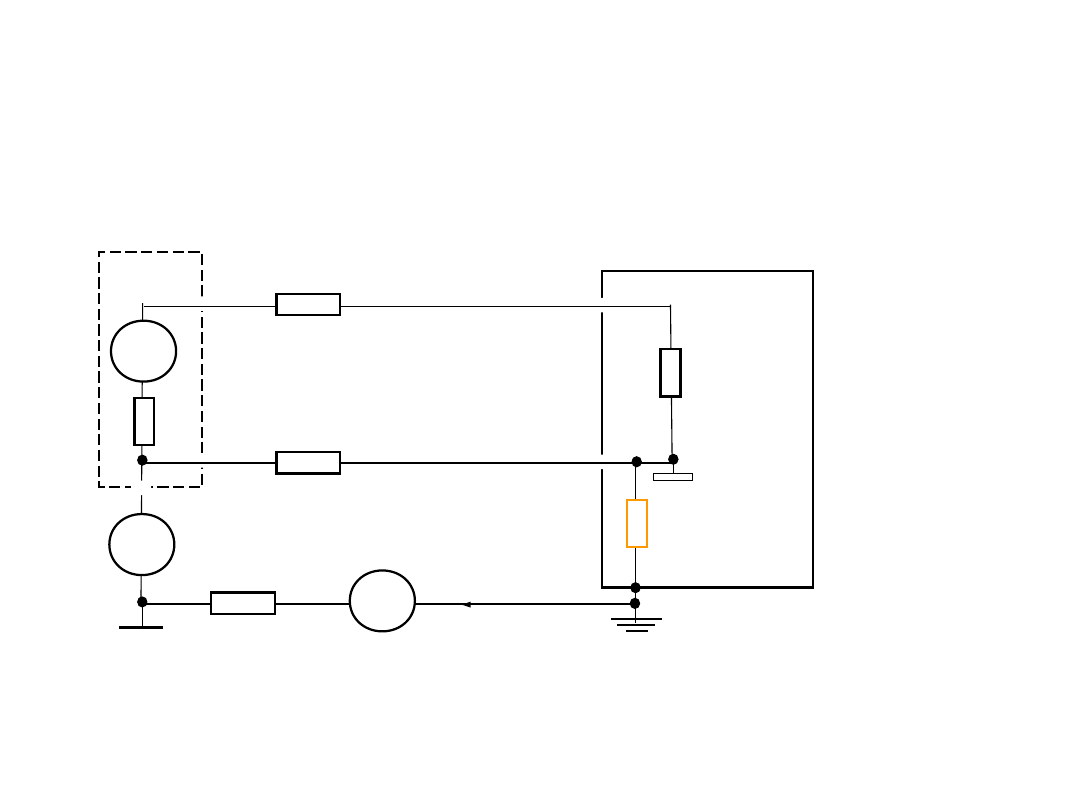
3.3.1.Analiza wpływu zakłócenia wspólnego przez R
iz
Typowy lub najgorsze wartości:
R
x
≈1…100
;
R
l1
=R
l2
≈1…1000 ;
R
z
≈1…100
R
we
≈>1…10 M; R
iz
≈>1…10 G; U
cm
≈230 V; U
z
10V
Uproszczenia
: R
we
=10 M >>R
l2
+R
x
=1000 +100
R
1sum
=R
we
+R
l2
+R
x
≈R
we
=
10 M; R
l1
R
1sum
R
l1
R
iz
>>R
l1
R
1sum
+R
z
R
l2
<1000
R
we
=10M
U
x
R
iz
10 G
Układ 2
R
z
10
R
l1
<1000
ZU
ZŹ
ZO
R
x
100
Układ 1
U
cm
230V
U
z
10V
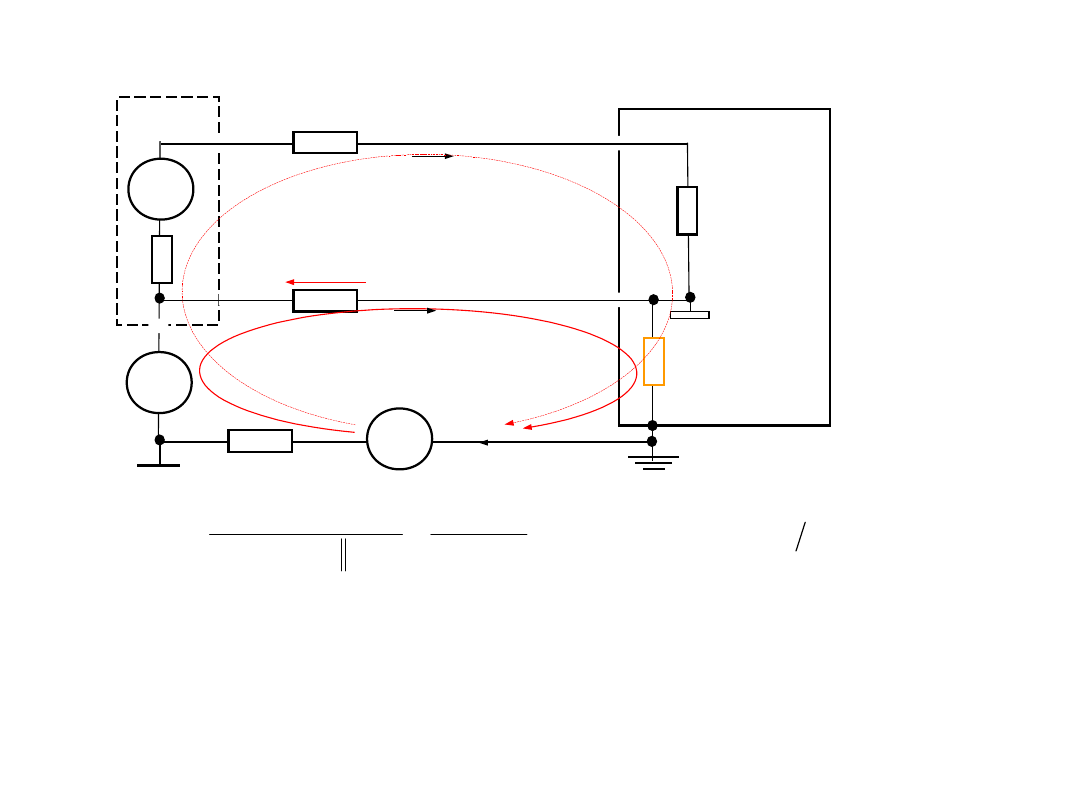
3.3.1.Analiza wpływu zakłócenia
wspólnego
I
2
=I
1
/10
4
<<I
1
R
l2
1000
R
we
=10M
U
x
I
Riz
=I
1
+I
2
25nA
R
iz
10 G
Układ 2
R
z
10
R
l1
1000
ZU
ZŹ
ZO
R
x
100
I
1
I
Riz
25nA
Układ 1
U
cm
230V
U
l1
=I
1
R
l1
25μV
U
z
10V
iz
z
cm
sum
z
iz
z
cm
Riz
R
U
U
R
R
R
R
U
U
I
I
2
1
1
nA
G
V
I
Riz
25
10
10
230
U
l1
=25 nA1000 =25
μV
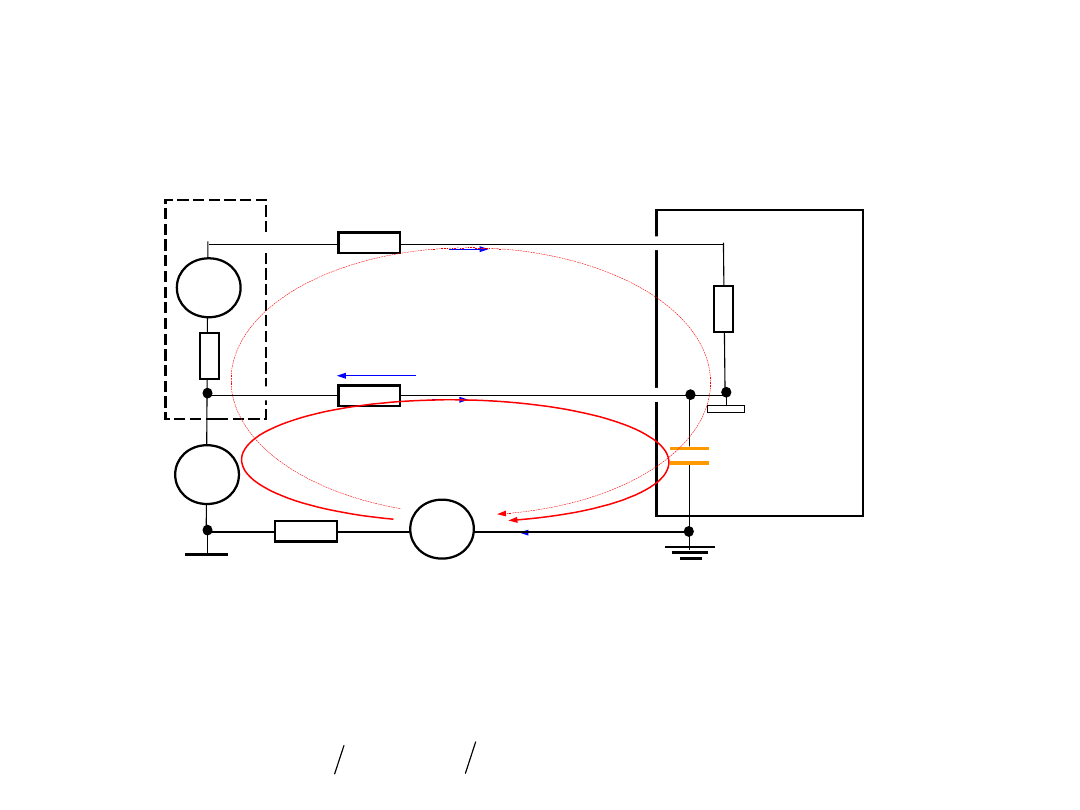
3.3.1.Analiza wpływu zakłócenia wspólnego
przez C
iz
Jeszcze gorsza sytuacja występuje w skutek działania pojemności
pasożytniczej C
iz
pomiędzy obudową odbiornika a obwodem
wspólnym
Typowa wartość pojemności wynosi około kilku dziesięć pikofarad:
przyjmiemy
C
iz
≈32 pF
.
Wtedy na częstotliwości sieciowej (f=50 Hz) impedancja tej
pojemności wynosi
U
z
10V
R
l2
1000
R
we
=10M
U
x
I
c
=I
1
+I
2
2,4A
C
iz
32pF
Układ 2
U
z
R
z
10
R
l1
1000
ZU
ZŹ
ZO
R
x
100
I
1
I
c
2,4A
Układ 1
U
cm
230V
U
l1c
=I
1
R
l1
2,4mV
I
2
=I
1
/10
4
<<I
1
M
fC
Z
iz
Ciz
100
10
32
314
1
2
1
12
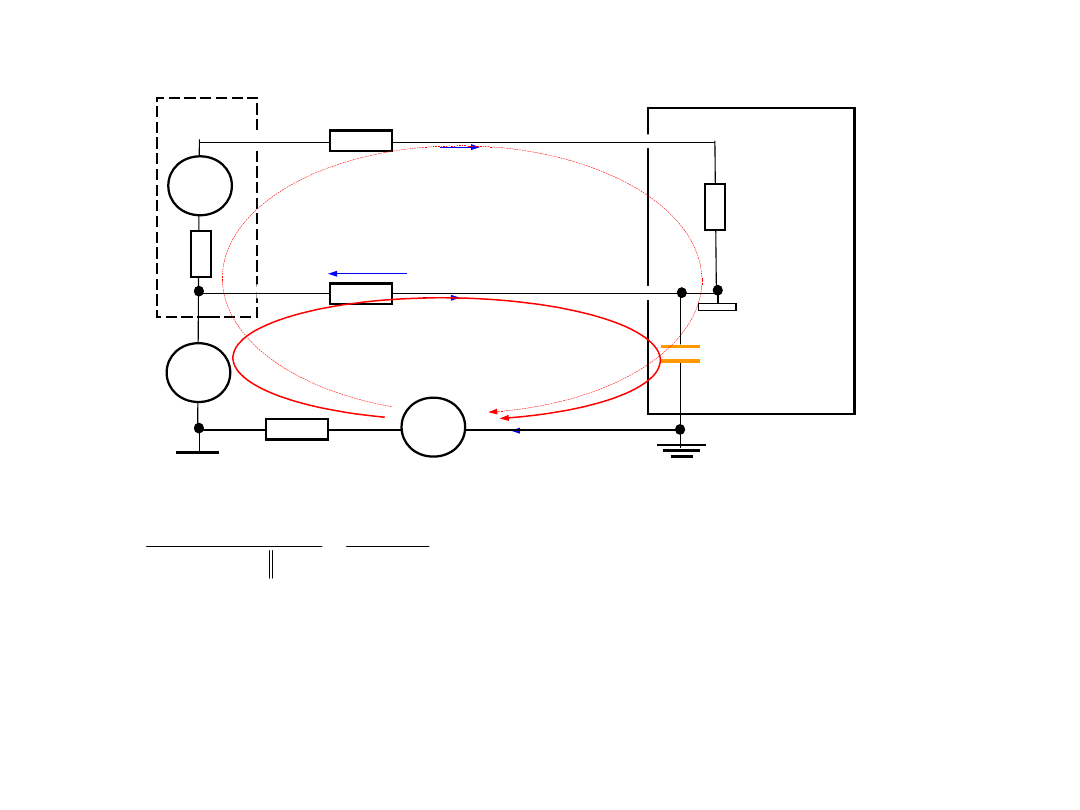
3.3.1.Analiza wpływu zakłócenia wspólnego
przez C
iz
Wartość napięcia zakłócającego normalnego wynosi
U
l1
≈2,4
A
1000
≈2,4 mV.
U
z
10V
R
l2
1000
R
we
=10M
U
x
I
c
=I
1
+I
2
2,4A
C
iz
32pF
Układ 2
U
z
R
z
10
R
l1
1000
ZU
ZŹ
ZO
R
x
100
I
1
I
ciz
2,4A
Układ 1
U
cm
230V
U
l1c
=I
1
R
l1
2,4mV
I
2
=I
1iz
/10
4
<<I
1
iz
z
cm
Ciz
z
cm
sum
z
Ciz
z
cm
Ciz
fC
U
U
Z
U
U
R
R
R
Z
U
U
I
I
2
2
1
1
A
Sm
V
I
I
Ciz
l
4
,
2
10
240
8
1

3.2.2. Współczynnik tłumienia
zakłócenia wspólnego
Stopień szkodliwości zakłócenia wspólnego zależy od stopnia
jego przekształcenia w zakłócenie normalne.
•Stopień takiego przekształcenia charakteryzuje się przez
współczynnik tłumienia zakłócenia wspólnego
(
C
ommon
M
ode
R
ejection
R
atio,
CMRR
).
•CMRR jest to stosunek wartości maksymalnej zakłócenia
wspólnego do wartości maksymalnej spowodowanego nim
zakłócenia normalnego obecnie wyrażana w decybeli
cm
nm
cm
U
U
U
CMRR
max
,
max
,
lg
20
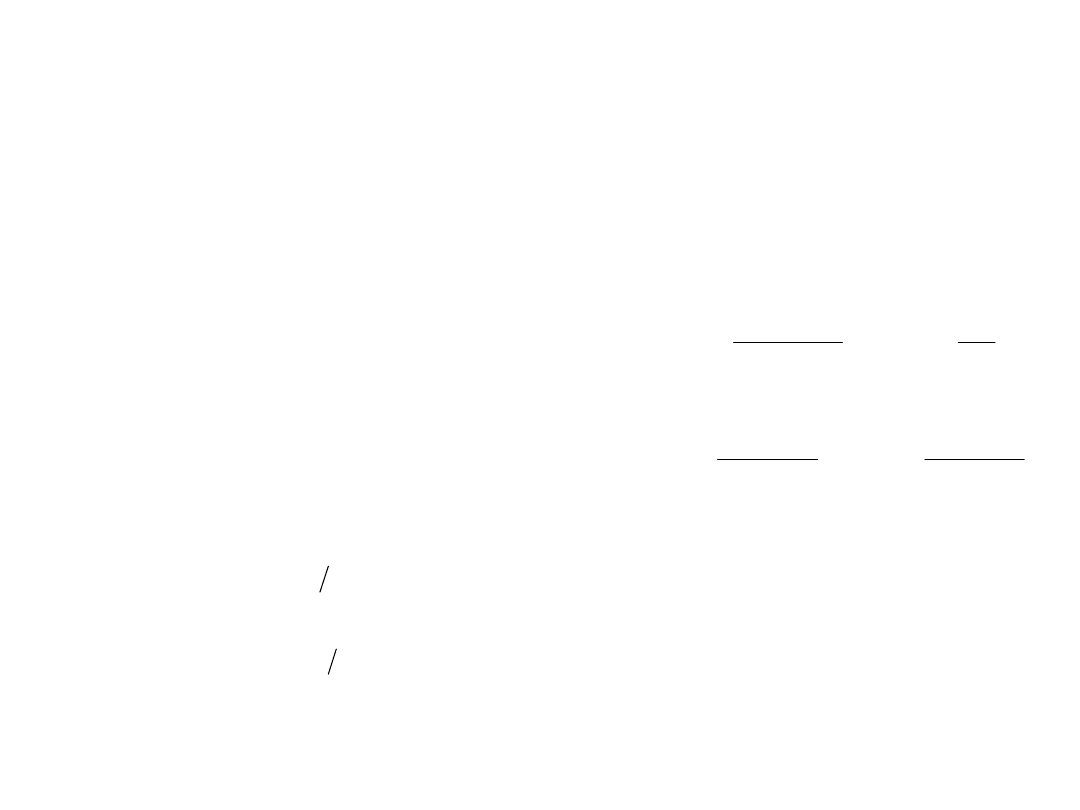
3.2.2. Współczynnik tłumienia
zakłócenia wspólnego
•Współczynniki tłumienia zakłóceń wspólnych są wyrażany
tylko przez
wartości rezystancji oraz pojemności izolacji
(z
jednej strony ) i
rezystancji linii pomiędzy źródłem odbiornikiem
sygnału
(z innej strony) parametry, a mianowicie:
•na prądzie stałym:
•na prądzie przemiennym
• (tłumienie 5
mln razy),
• (tłumienie
100 tys. razy).
1
,
lg
20
lg
20
l
iz
n
Riz
z
cm
Riz
R
R
U
U
U
CMRR
1
,
2
1
lg
20
lg
20
l
iz
n
Ciz
z
cm
Ciz
R
fC
U
U
U
CMRR
dB
G
CMRR
Riz
134
10
5
lg
20
1000
5
lg
20
6
dB
M
CMRR
Ciz
100
100000
lg
20
1000
100
lg
20
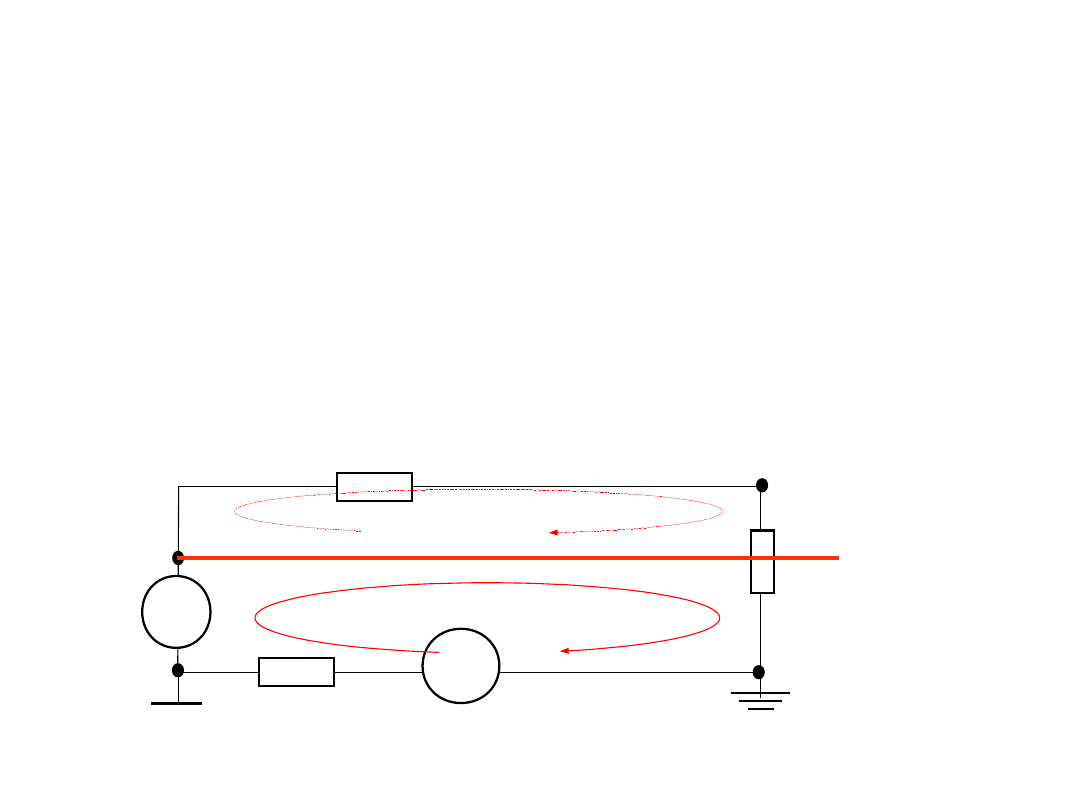
3.3.3. Ekranowanie ekwipotencjalne
•Jeżeli za pośrednictwem przewodu z zerowa rezystancją
(R
E
=0) połączyć punkt A (punkt oddziaływania zakłócenia
wspólnego) z płaszczyzną B (która tez ma zerową rezystancję i
przecina izolację pomiędzy obudową i nisko potencjalnym
wejściem), jak jest pokazano na rys. , wtedy prąd (I
Riz2
) od źródeł
zakłócających będzie płynąć w obwodzie utworzonym tymi
przewodem i płaszczyzną, omijając obwód z przewodem
sygnałowym (I
l1
=0).
R
iz1
I
1
0
U
cm
U
R1
0
I
Riz2
R
z
ZŹ
ZO
U
z
A
B
R
iz2
R
l1
R
AB
=R
E
0
U
AB
0
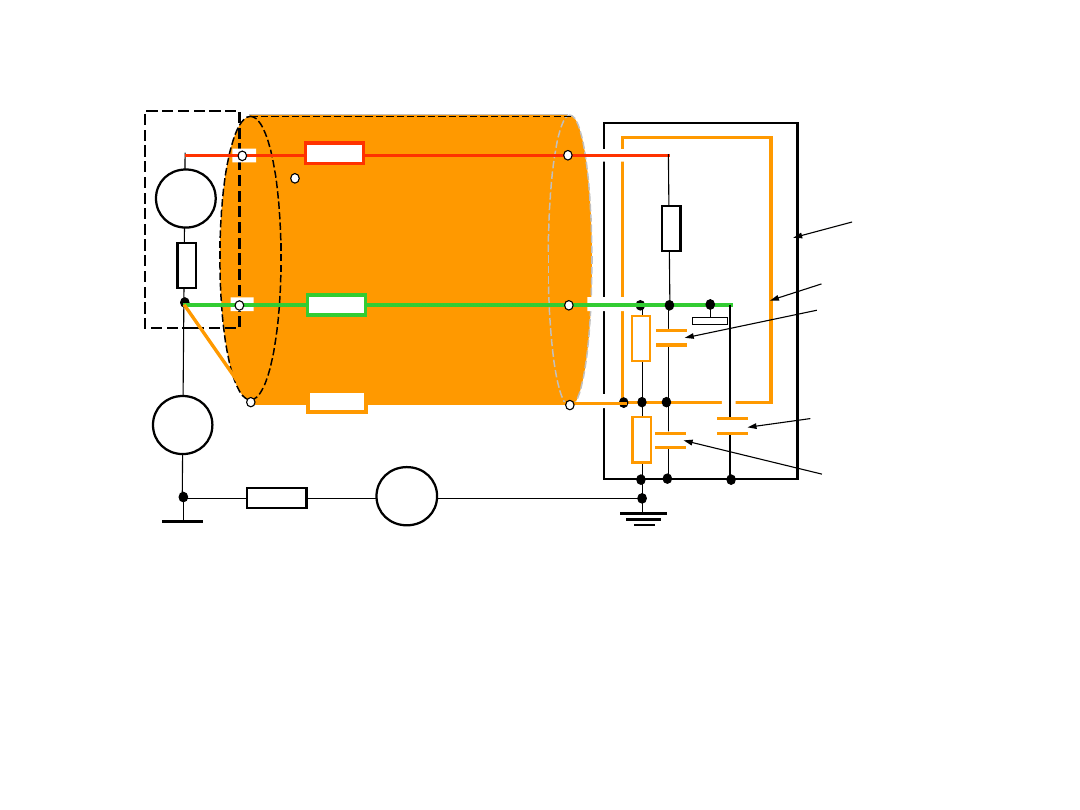
3.3.3. Ekranowanie ekwipotencjalne
•W układzie z ekranowaniem ekwipotencjalnym ma miejsce
się
dwustopniowe przekształcenie zakłócenia
wspólnego w
zakłócenie normalne
.
Ekran
ZŹ
C
iz
, R
iz
R
l2
U
x
C
iz
, R
iz
Układ 2
R
l1
R
x
Układ 1
LO
HI
C
p
=1...2p
F
R
we
ZU
1
2
3
Ekran
Obudow
a
U
z
R
z
ZO
U
uz
E
R
e
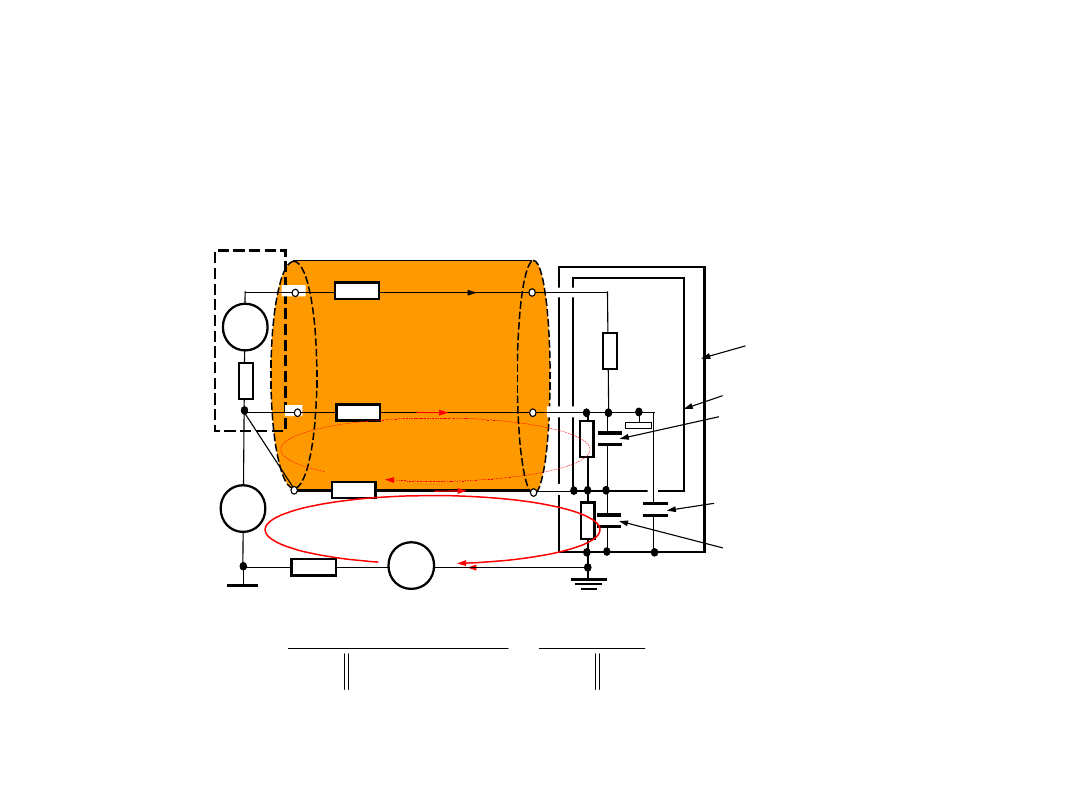
3.3.3. Ekranowanie ekwipotencjalne
Na drugim stopniu zakłóceniem wspólnym staje się spadek
napięcia na ekranie, które powoduje prąd zakłócający przez
rezystancję linii R
l1
zależny od wartości impedancji połączenia
poprzez pojemność izolacji C
iz2
oraz rezystancję izolacji R
iz2
U
l1
=0,1 nA
1000
=0,1 μV
C
iz1
, R
iz1
R
l2
1000
U
x
C
iz2
, R
iz2
Układ 2
R
l1
1000
R
x
100
I
2
<<I
1
Układ 1
LO
HI
C
p
=
1...2pF
R
we
=
10M
ZU
1
2
3
U
e
5mV
Ekran
Obudow
a
I
iz
5A
Uz
=10 V
R
z
10
ZŹ
ZO
U
uz
230V
I
e
I
iz
5A
E
R
e
1000
I
Rle
U
e
/Z
iz2
0,1nA
U
e1
0,1 V
2
2
2
1
2
2
1
2
iz
e
iz
Ciz
e
l
e
iz
Ciz
e
e
Rl
fC
U
R
Z
U
R
R
R
Z
U
I
nA
Sm
mV
I
e
Rl
1
,
0
10
2
5
8
1
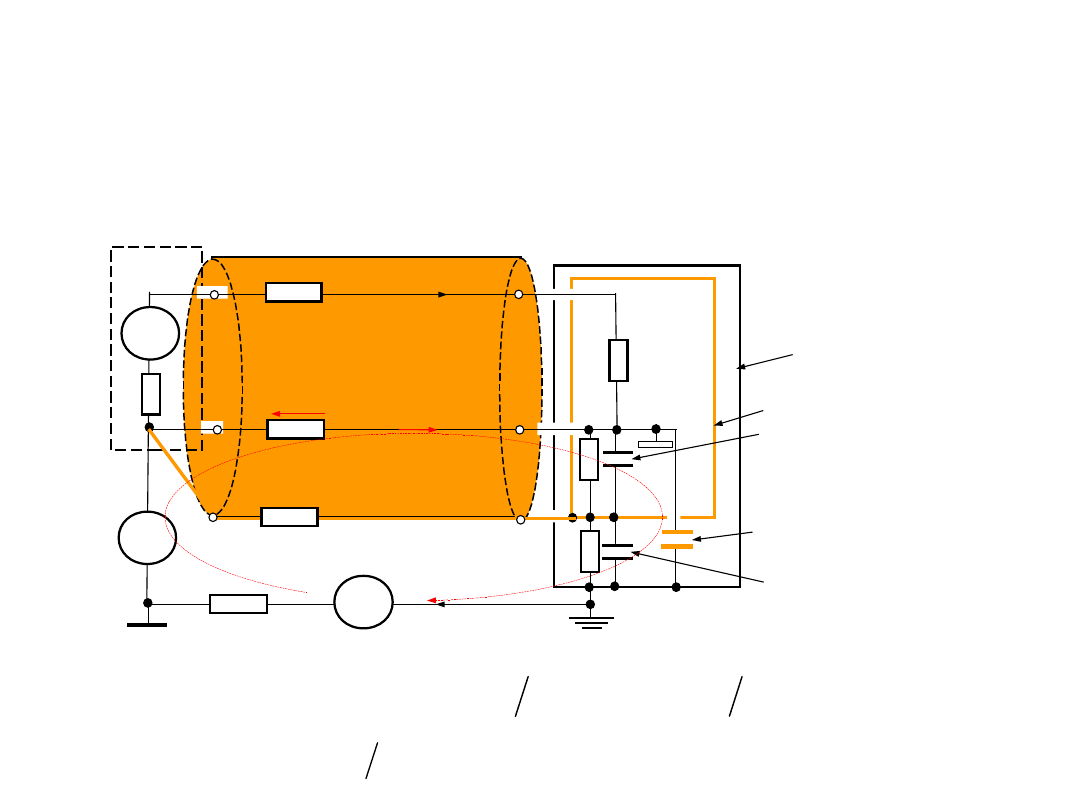
3.3.3. Ekranowanie ekwipotencjalne
Jednak w tym przypadku oprócz rezystancji i pojemności izolacji
pomiędzy linią sygnałową a ekranem (R
iz2
, C
iz2
) oraz pomiędzy
ekranem i obwodami źródeł zakłócających (R
iz1
, C
iz1
) występuje
pasożytnicza (przejściowa) pojemność C
p
) pomiędzy linią sygnałową a
obwodami źródeł zakłócających (obudową).
1
2
1
20
20
l
p
n
,
Cp
z
cm
Cp
R
fC
lg
U
U
U
lg
CMRR
C
iz2
,
R
iz2
R
l2
1000
U
x
C
iz1
,
R
iz1
Układ 2
R
l1
1000
R
x
I
2
<<I
1
Układ 1
LO
HI
C
p
=
1...2pF
R
we
=
10M
ZU
1
2
3
I
Cp
(U
uz
+U
z
)/Z
cp
0,15 A
U
Rl1Cp
I
Cp
R
l1
0,15mV
Ekran
Obudow
a
Uz10 V
R
z
10
ZŹ
ZO
U
uz
230V
E
R
e
1000
I
Cp
dB
Sm
,
lg
CMRR
Cp
125
1000
10
28
6
1
20
10
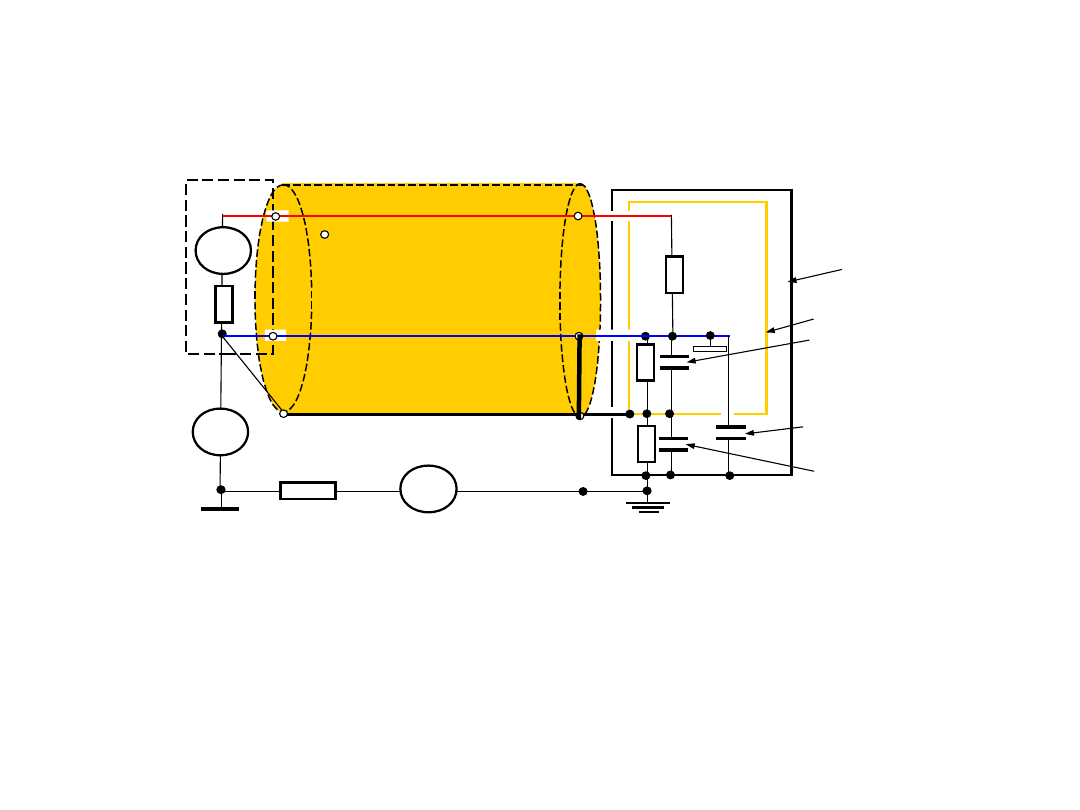
Nieprawidłowe połączenie obiektu i
miernika
Często podczas pomiarów w celu „uproszczenia” połączeń
obiektu badanego i miernika w ostatnim łączą zaciski LO
(potencjał niski) oraz E (ekran)
Przy takim połączeniu traci się skuteczność ekranowania
ekwipotencjalnego.
Ponieważ wtedy oddziaływanie napięcia wspólnego odbywa się
przez izolację C
iz2
, R
iz2
zamiast pojemności przejściowej C
p
, która
w kilku dziesięć razy jest mniejsza od pojemności C
iz2
.
ZŹ
C
iz2
, R
iz2
U
x
C
iz1
, R
iz1
Układ 2
R
x
Układ 1
LO
HI
C
p
=1...2pF
R
we
ZU
1
2
3
Ekran
Obudowa
Uz
R
z
ZO
U
uz
E
Ekran

Nieprawidłowe połączenie obiektu i
miernika
Rekomendację:
- w celu skutecznego tłumienia zakłóceń wspólnych należy
stosować ekranowanie ekwipotencjalne;
- na obiekcie badanym ekran należy podłączać w jak
najbliższym punkcie do oddziaływania zakłócenia wspólnego;
- po stronie miernika nie można łączyć zaciski LO (potencjał
niski) oraz E (ekran), w wyniku czego traci się skuteczność
ekranowania ekwipotencjalnego.
Obliczanie wartości błędu przez
ograniczona wartością współczynnika
tłumienia zakłócenia wspólnego
Jeżeli wartość maksymalna sygnału wspólnego
wynosi wtedy przy
współczynniku tłumienia CMRR maksymalna
wartość napięcia normalnego , w które
zostało transformowane napięcie wspólne równa
się
Na przykład, przy oraz CMRR=100 dB
maksymalna wartość napięcia normalnego
, w które zostało transformowane napięcie
wspólne równa się
wsp
U
max,
norm
U
max,
20
max,
max,
10
CMRR
wsp
norm
U
U
V
U
wsp
230
max,
norm
U
max,
mV
V
U
norm
3
,
2
10
230
20
100
max,

Sumaryczny współczynnik tłumienia
zakłócenia (napięcia) wspólnego
Jeżeli karta pomiarowa zapewnia tłumienie napięć
wspólnego oraz normalnego (szeregowego) wtedy
sumaryczny współczynnik napięcia wspólnego
równa się sumie współczynników
CMMR+NMRR
dla którego maksymalna wartość błędu,
spowodowanego tym zakłóceniem równa się
Na przykład, przy oraz CMMR=100 dB i
NMRR=40 dB maksymalna wartość maksymalna
wartość błędu, spowodowanego zakłóceniem
wspólnym równa się
20
max,
max
10
NMRR
CMRR
wsp
U
V
U
wsp
230
max,
mkV
V
23
10
230
20
40
100
max

RÓWNOMIERNE
CYFROWE
UŚREDNIANIE
SYGNAŁÓW

Plan wykładu
1. Wstęp. Uśrednianie zwykłe (równoważne).
2. Tłumienie (eliminacja) składowych
harmonicznych
Cel: Zapoznać się z zasadami oraz wyznaczaniem
podstawowych parametrów uśredniania cyfrowego
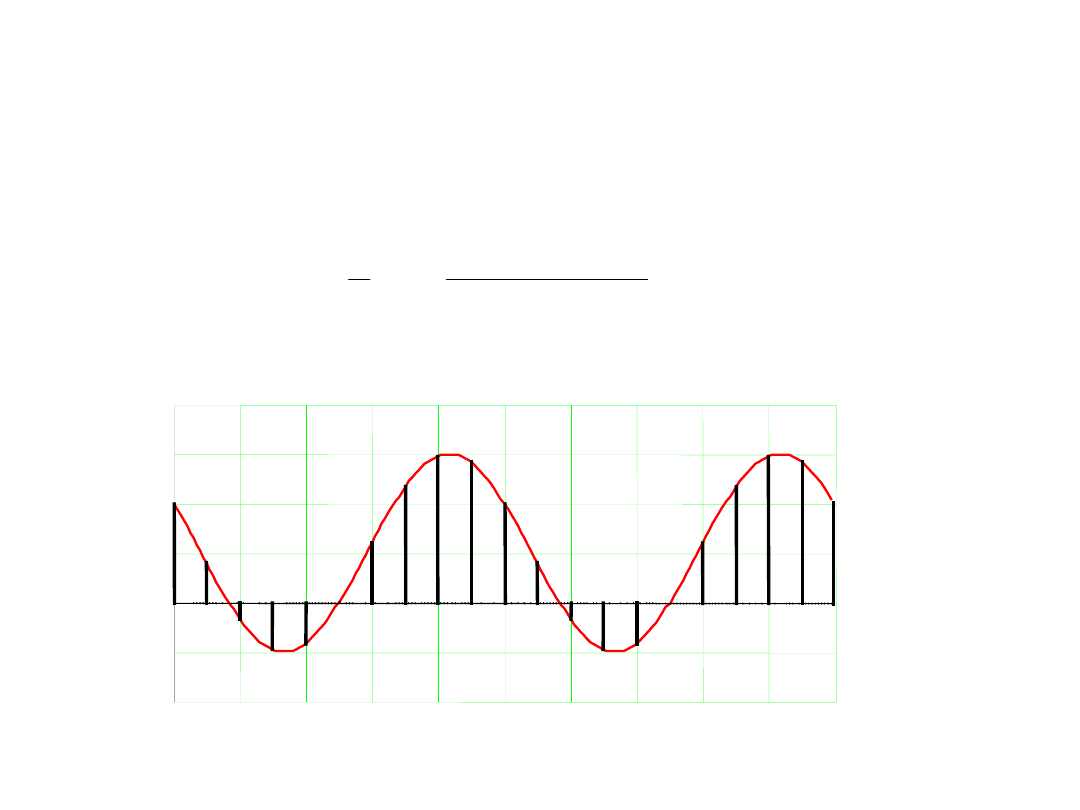
1. Wstęp
Zasada cyfrowego uśredniania polega na wstępnym
przetwarzaniu analogowo-cyfrowym sygnału wejściowego -
skrót: pobranie próbek U
1
, U
2
,…, U
n
) w dyskretny momenty
czasowe t
1
, t
2
,…, t
n
i następnym wyznaczaniu wartości średniej
z N próbek
1
2
4
6
8
10
12
14
16
18
20
u(t)
U
i
i
N
U
U
U
U
U
N
U
N
N
i
i
sr
...
1
3
2
1
1
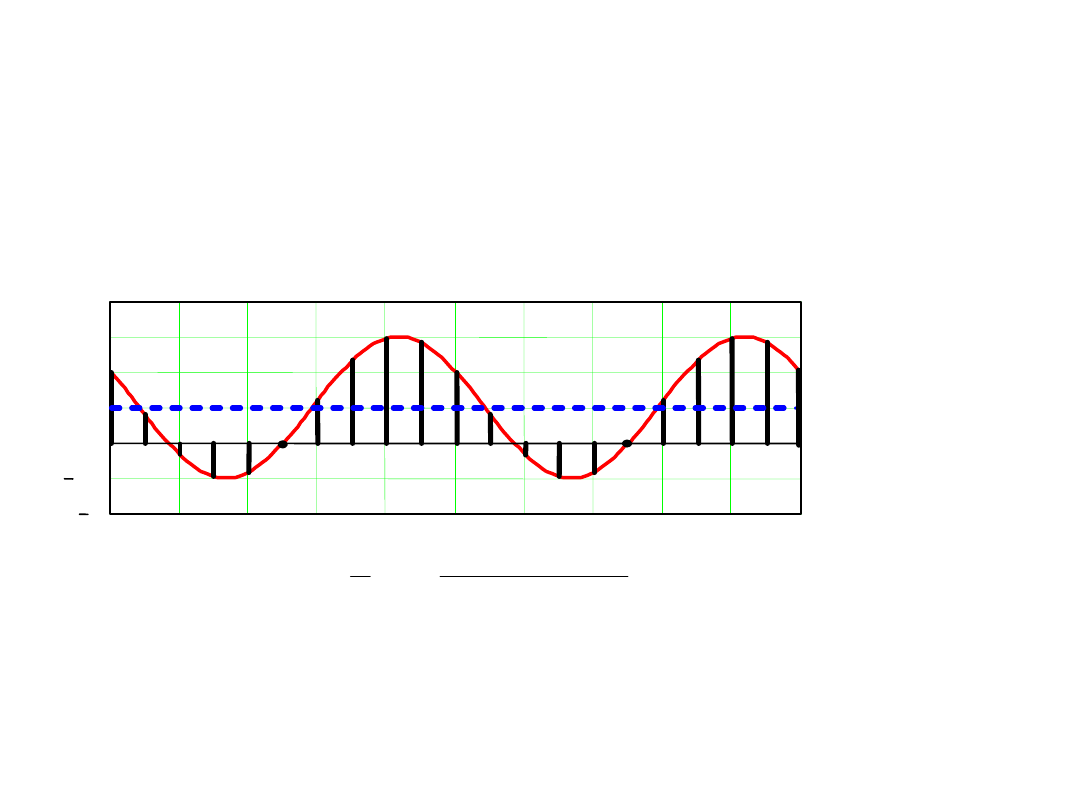
1. Wstęp
W praktyce pomiarowej na drodze uśredniania często są mierzone
parametry sygnałów przemiennych, będących wartościami średnimi
pewnych funkcji wartości chwilowych sygnału:
Wartość składowej stałej sygnału
0
2
4
6
8
10
12
14
16
18
20
1
0.5
0
0.5
1
1.5
2
u(t)
U
i
Us
i
N
U
U
U
U
U
N
U
U
N
N
i
i
DC
...
1
3
2
1
1
0
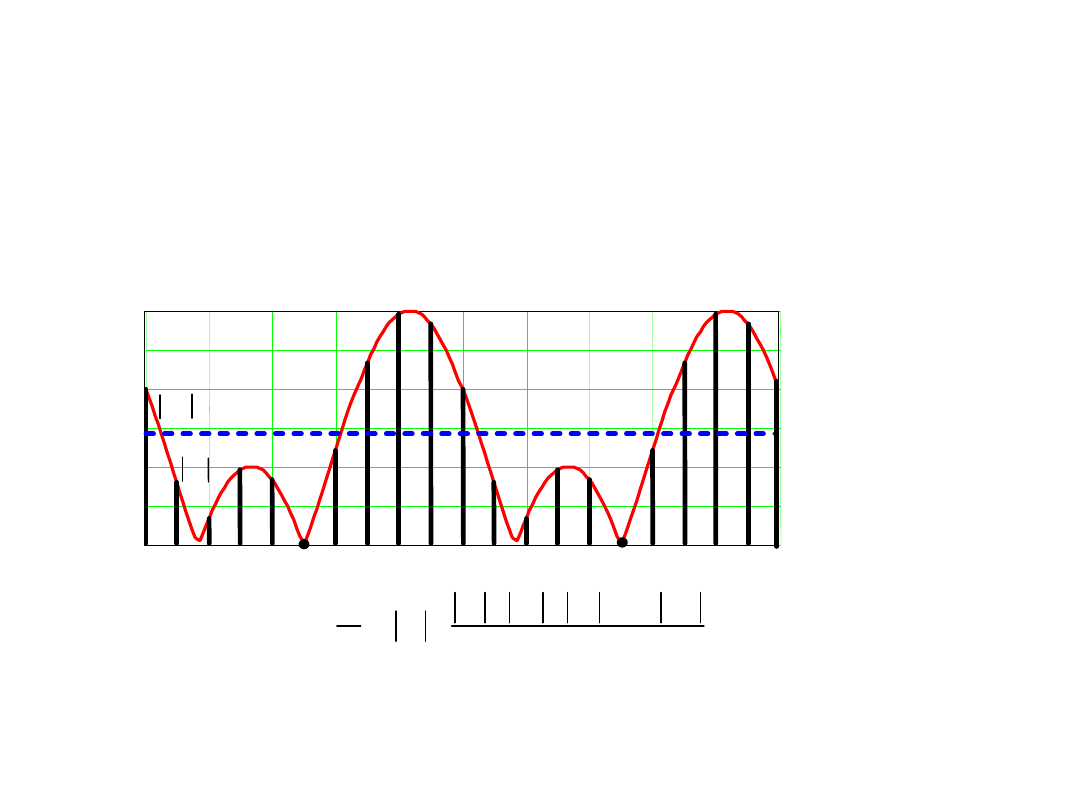
1. Wstęp
W praktyce pomiarowej na drodze uśredniania często są mierzone
parametry sygnałów przemiennych, będących wartościami średnimi
pewnych funkcji wartości chwilowych sygnału:
Wartość średnia wyprostowana sygnału
0
2
4
6
8
10
12
14
16
18
20
0
0.25
0.5
0.75
1
1.25
1.5
u(t)
U
s
i
U
i
N
U
U
U
U
U
N
U
N
N
i
i
SW
...
1
3
2
1
1
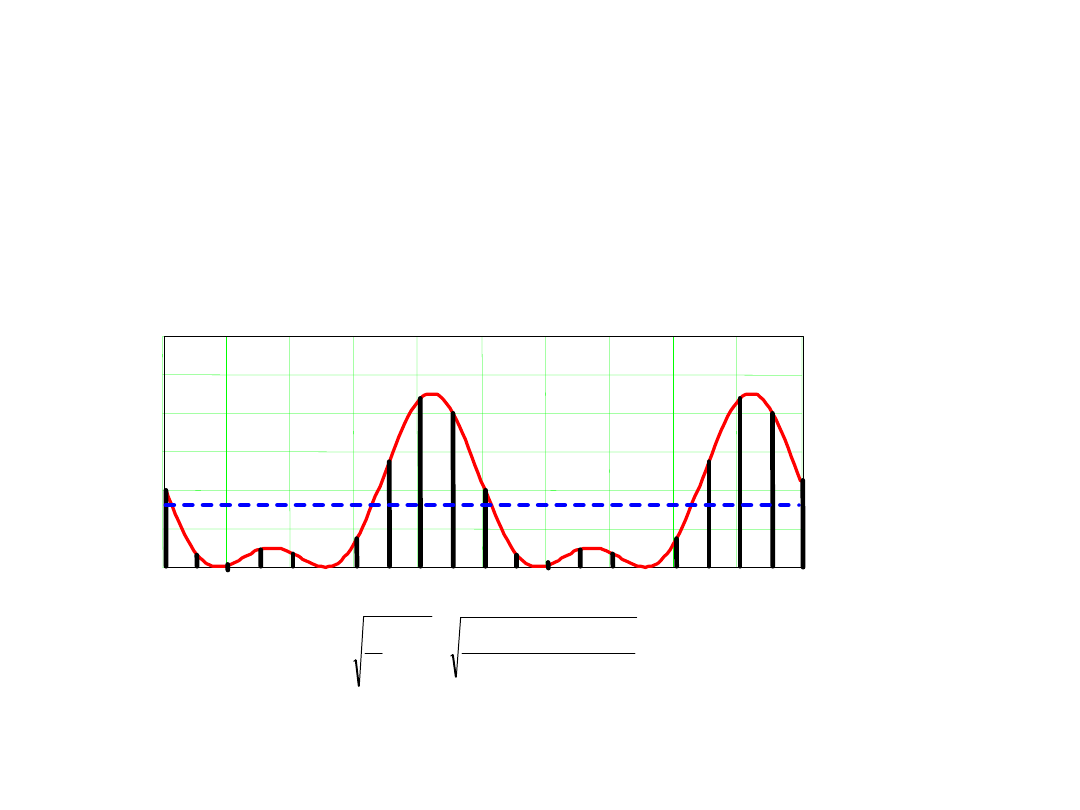
1. Wstęp
W praktyce pomiarowej na drodze uśredniania często są mierzone
parametry sygnałów przemiennych, będących wartościami średnimi
pewnych funkcji wartości chwilowych sygnału:
Wartość skuteczna sygnału
0
2
4
6
8
10
12
14
16
18
20
0
0.5
1
1.5
2
2.5
3
u
(
t)
2
U
i
2
U
RMS
i
2
N
U
U
U
U
U
N
U
U
N
N
i
i
TrueRMS
2
2
3
2
2
2
1
1
2
...
1
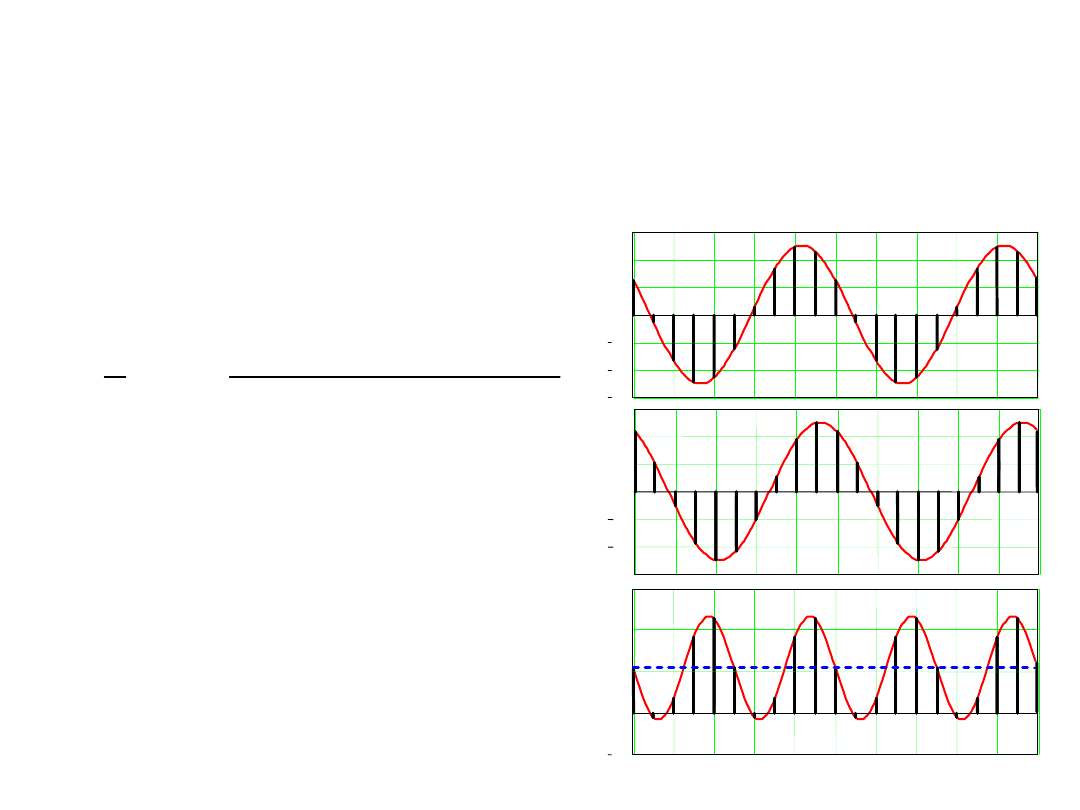
1. Wstęp
W praktyce pomiarowej na drodze uśredniania często są mierzone
parametry sygnałów przemiennych, będących wartościami średnimi
pewnych funkcji wartości chwilowych sygnału:
Wartość mocy czynnej
-0.6
0
2
4
6
8
10
12
14
16
18
20
0.4
0.2
0
0.2
0.4
0.6
i(t)
I
i
i
0
2
4
6
8
10
12
14
16
18
20
1.2
0.8
0.4
0
0.4
0.8
1.2
u(t)
U
i
i
0
2
4
6
8
10
12
14
16
18
20
0.2
0
0.2
0.4
0.6
i
P
i
P
p(t)
a
b
c
N
I
U
I
U
I
U
I
U
I
U
N
P
N
N
N
i
i
i
...
1
3
3
2
2
1
1
1

2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
2.1. Skuteczność uśredniania.
We wszystkich algorytmach pomiarów parametrów sygnałów
zmiennych po odpowiednim przetwarzaniu sygnału
wejściowego istnieją:
- korzystna składowa
w postaci
składowej stałej
Ux;
- niekorzystna składowa
w postaci
składowych harmonicznych
Uh(t) przetworzonego sygnału
)
(
i
h
x
i
t
U
U
U
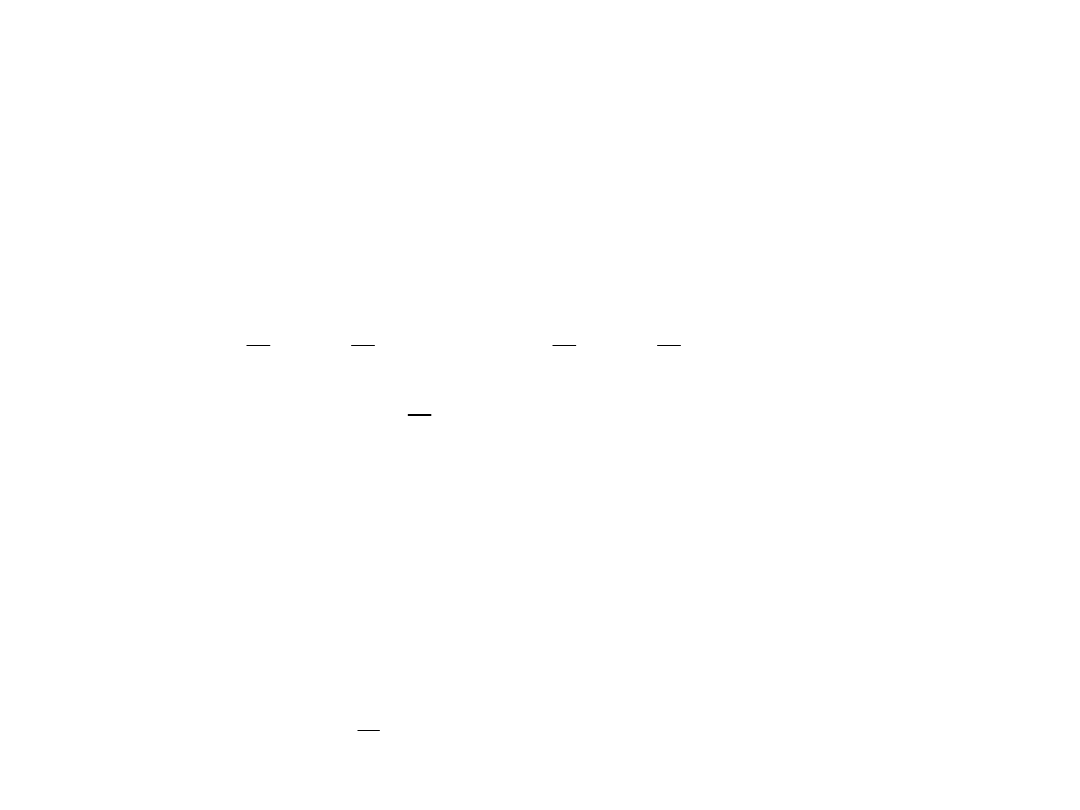
2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
2.1. Skuteczność uśredniania.
Według definicji parametrów sygnałów zmiennych zadaniem
operacji uśredniania
-
wyznaczanie składowej stałej
przetworzonego odpowiednio do
mierzonego parametru sygnału;
-
eliminacja (tłumienie) składowych harmonicznych
,
wynikających podczas odpowiedniego przetwarzania
sygnału.
N
i
i
h
x
N
i
i
h
N
i
x
N
i
i
h
x
N
i
i
t
U
N
U
t
U
N
U
N
t
U
U
N
U
N
1
1
1
1
1
)
(
1
)
(
1
1
)
(
1
1
0
)
(
1
1
h
N
i
i
h
U
t
U
N
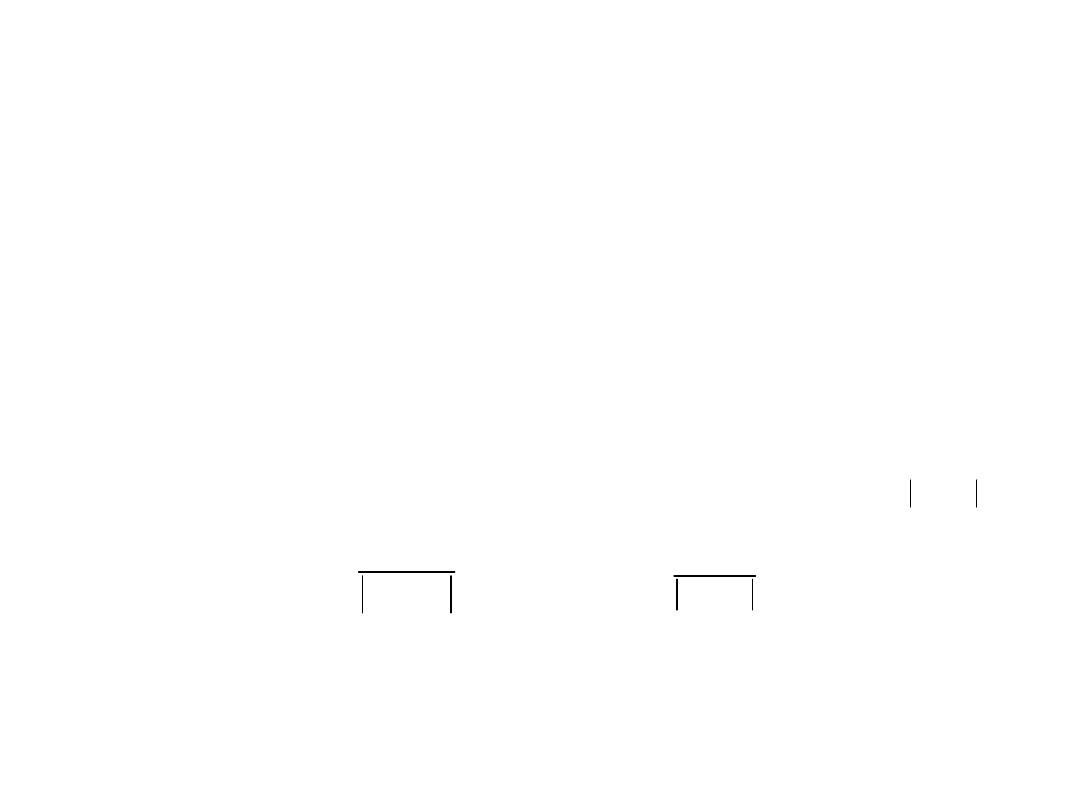
2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
2.1. Skuteczność uśredniania.
Skuteczność eliminacji (tłumienia) niekorzystnych składowych
harmonicznych
na drodze uśredniania próbek sygnału może
być scharakteryzowana
- błędem uśredniania , który powinien dążyć do zera ,
- współczynnikiem tłumienia K
tł
, jako stosunek amplitudy
składowej harmonicznej do modułu maksymalnego błędu
0
h
U
m
h
U
,
max
,
h
U
max
,
,
h
m
h
tl
U
U
K
max
,
,
,
lg
20
h
m
h
dB
tl
U
U
K

2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
Podstawowe zagadnienia cyfrowego uśredniania
sygnałów :
•
Wyznaczanie minimalnej liczby N
min
uśrednianych
próbek sygnału niezbędnych dla teoretycznie całkowitej
eliminacji składowych harmonicznych; oraz
•
Wyznaczanie okresu T
d
(częstotliwości f
d
) próbkowania.
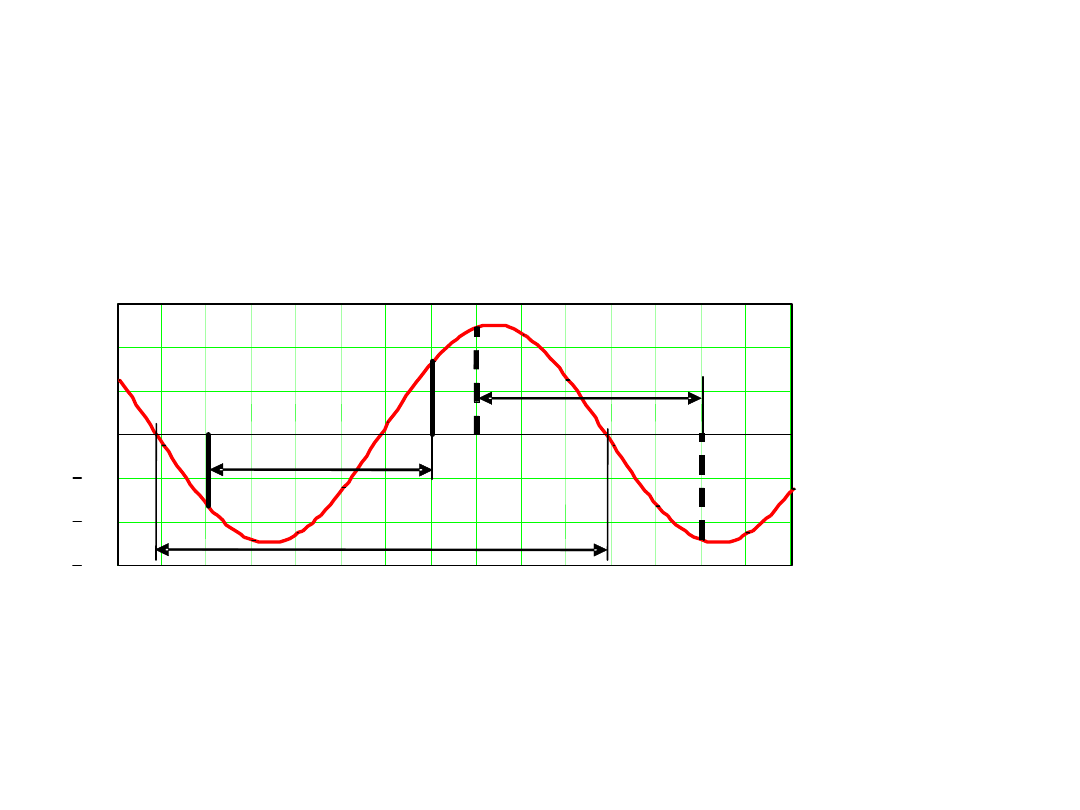
2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
2.2. Jedna składowa harmoniczna sygnału przetworzonego.
•Minimalna liczba uśrednianych próbek
N
min
=2
•Okres próbkowania
T
d
=T/2
Jest to możliwie dzięki temu, że dwie wartości (próbki) sygnału
harmonicznego pobrane w momenty czasowe
t1
oraz
t2
z odstępem
czasowym pół okresu (
Td=T/2
):
t2=t1+T/2
różnią się znakiem przy
równych wartościach modułów
U2=-U1, U4=-U3
1.2
0.8
0.4
0
0.4
0.8
1.2
u(t)
U
1
U
2
=-U
1
T
d
=T/2
T
t
1
t
2
=t
1
+T/2
T
d
=T/2
U
3
t
3
t
4
=t
3
+T/2
U
4
=-U
3

2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
2.3.
Podstawowa + k-ta składowa harmoniczna sygnału przetworzonego
.
częstotliwość składowej harmonicznej:
f
k
=k·f
1
,
okres której równa się:
T
k
=1/f
k
=1/(k·f
1
)=T/k
,
f
1
=1/T-
częstotliwość podstawowej składowej harmonicznej
Jeżeli postępować analogicznie jak w poprzednim przypadku, można wnioskować, że dla eliminacji
(tłumienia) wpływu
k
-tej składowej harmonicznej na każdy jej okres należy pobrać minimalnie
N
k,min
=2
próbki
z odstępem pół okresu tej składowej:
T
d
=T
k
/2=T/2·k
,
Dla jednoczesnej eliminacji (tłumienia) wpływu podstawowej harmonicznej należy pobrać i uśrednić
N=k·N
k,min=
2·k
próbek w ciągu okresu sygnału
T
Jest to możliwie dzięki temu, że dwie wartości (próbki) sygnału harmonicznego pobrane w momenty
czasowe
t1
oraz
t2
z odstępem czasowym pół okresu (
Td=T/2
):
t2=t1+T/2
różnią się znakiem przy
równych wartościach modułów
U2=-U1, U4=-U3
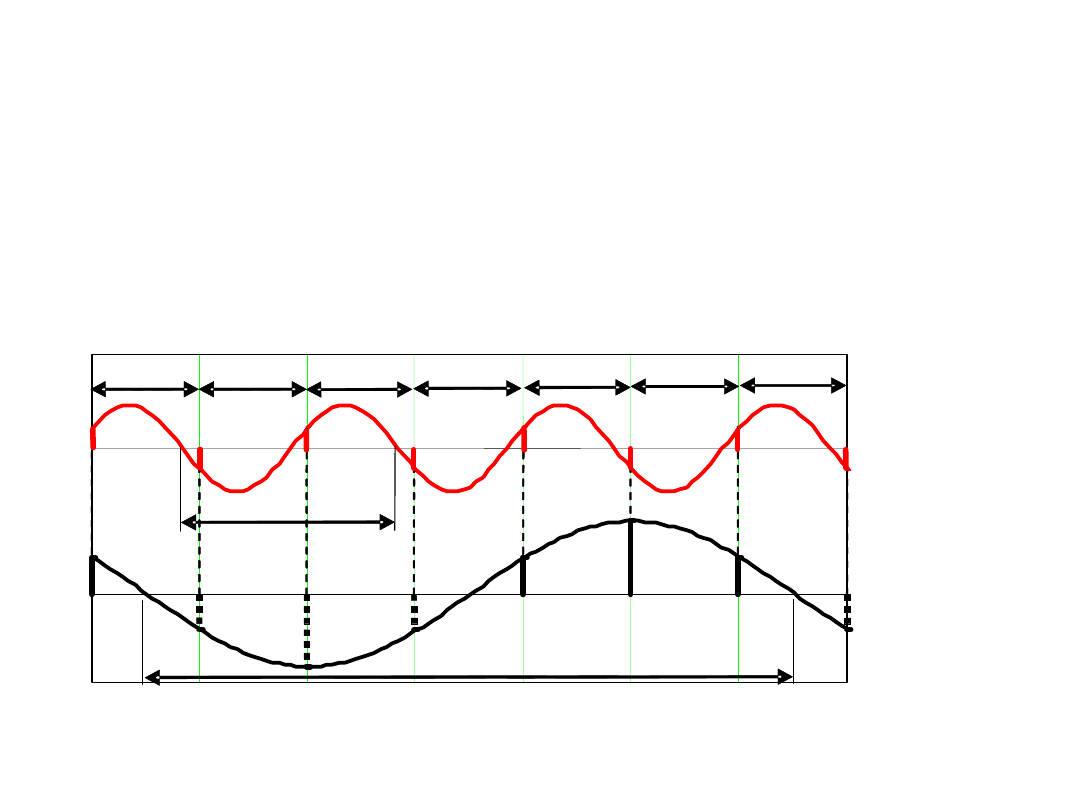
2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
2.3.
Podstawowa + k-ta składowa harmoniczna sygnału
przetworzonego
.
0
u
3
(t)
u
1
(t)
U
3,1
T
d
=T
3
/2
T
d
T
d
T
d
T
d
T
d
T
d
U
3,2
U
3,3
U
3,4
U
3,5
U
3,6
U
1,1
U
1,2
U
1,3
U
1,4
U
1,5
U
1,6
t
1
t
2
t
3
t
4
t
5
t
6
t
7
U
1,7
U
3,7
T
3
T=3·T
3
Eliminacja wpływu podstawowej oraz 3-ej składowej harmonicznej
(k=3)

2. Tłumienie (eliminacja) składowych
harmonicznych w trakcie ich
uśredniania
Z ostatnich wzorów wynika, ze dla całkowitej eliminacji
podstawowej składowej harmonicznej oraz składowej z
numerem
k
należy pobrać minimalnie
N
min
=2k
próbek z
odstępem pół okresu
T
d
=T
k
/2=T/2k
k
-tej składowej i następnie uśrednić ich.
Częstotliwość próbkowania powinna być dwukrotnie większą
od częstotliwości wyższej składowej harmonicznej
f
d
=2f
k
=2kf
1
co się zgadza z twierdzeniem
Kotelnikowa-Shennona
.
Jednak takie wymaganie jest zbyt ostre, i
dla tłumienia
wszystkich całkowych harmonicznych od 1-ej do k-tej
częstotliwość próbkowania może być mniejsza oraz liczba
uśrednianych próbek tez może być mniejszą
.
2.4. Uogólnione wyrażenia tłumienia
składowych harmonicznych podczas
uśredniania spróbkowanego sygnału
Wartość średnia próbek sygnału harmonicznego
o amplitudzie U
h,m
, częstotliwości
przy okresie próbkowania wynosi
T
d
=T/N
2
f
ft
U
t
u
m
h
h
2
cos
)
(
,
.
sin
sin
1
1
cos
2
cos
)
(
)
(
1
,
1
,
1
N
T
f
fT
N
N
N
fT
U
i
fT
N
U
f
U
t
u
N
m
h
N
i
d
m
h
h
N
i
i
h
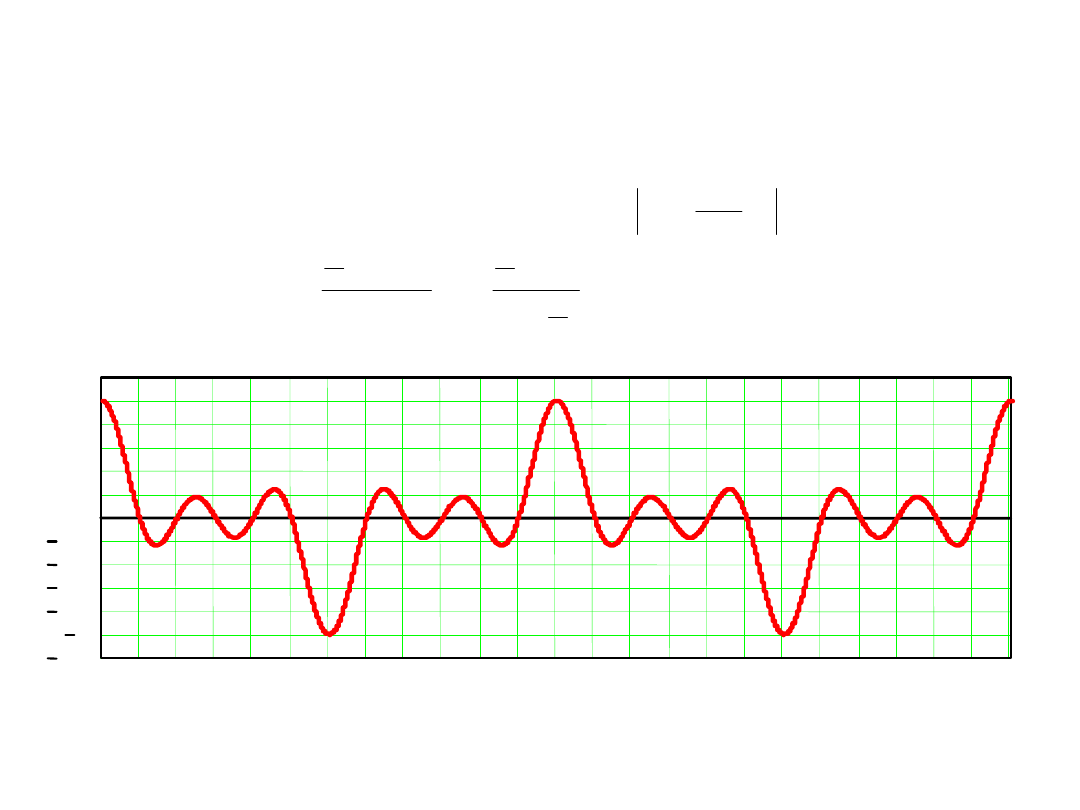
2.4. Uogólnione wyrażenia tłumienia
składowych harmonicznych podczas
uśredniania spróbkowanego sygnału
Wartość maksymalna błędu
.
sin
sin
1
sin
sin
1
,
,
max
,
N
T
f
fT
N
U
fT
N
fT
N
U
U
m
h
d
d
m
h
h
1
1
cos
max
N
N
fT
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1.2
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
ΔU
h,max
(f)
fT
Zależność maksymalnej wartości błędu składowych harmonicznych
przy uśrednianiu
N=6
próbek sygnału wciągu jego okresu T
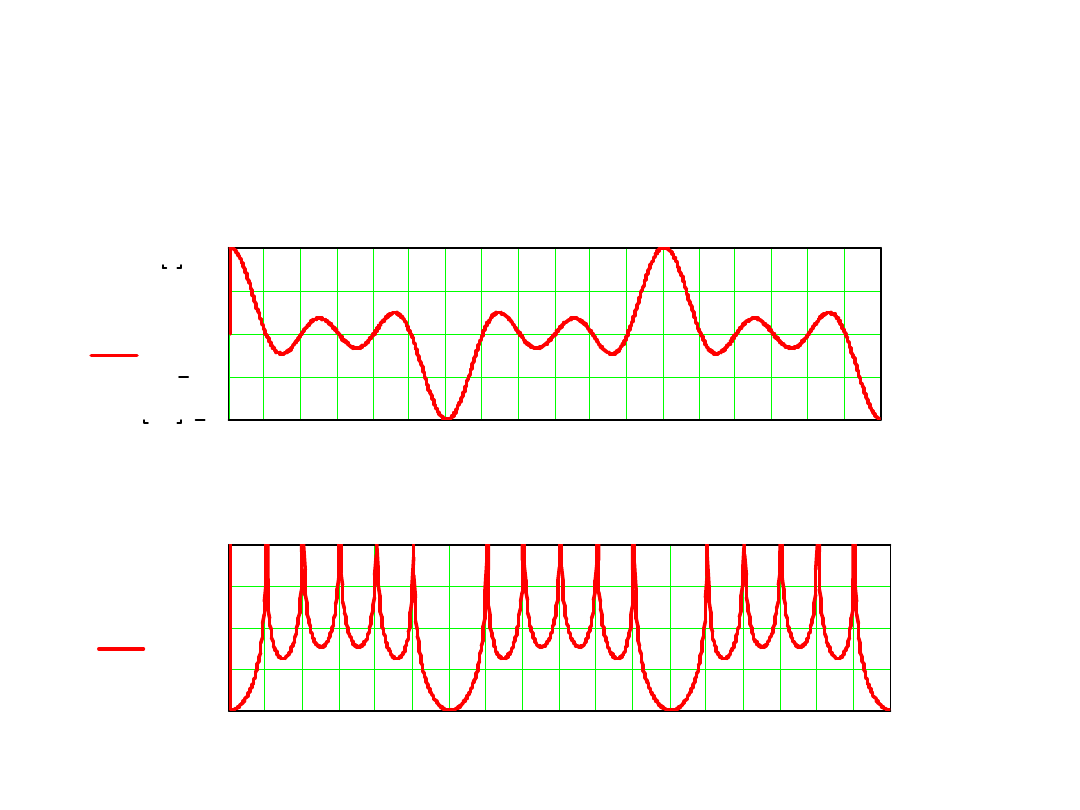
2.4. Uogólnione wyrażenia tłumienia
składowych harmonicznych podczas
uśredniania spróbkowanego sygnału
Wartość maksymalna
błędu
Współczynnik tłumienia
x=fT
0
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18
0
10
20
30
40
40
0
Ktl 6 x
(
)
18
0
x
0
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16 17 18
1
0.5
0
0.5
1
1
1
Usr 6 x
(
)
18
0
x
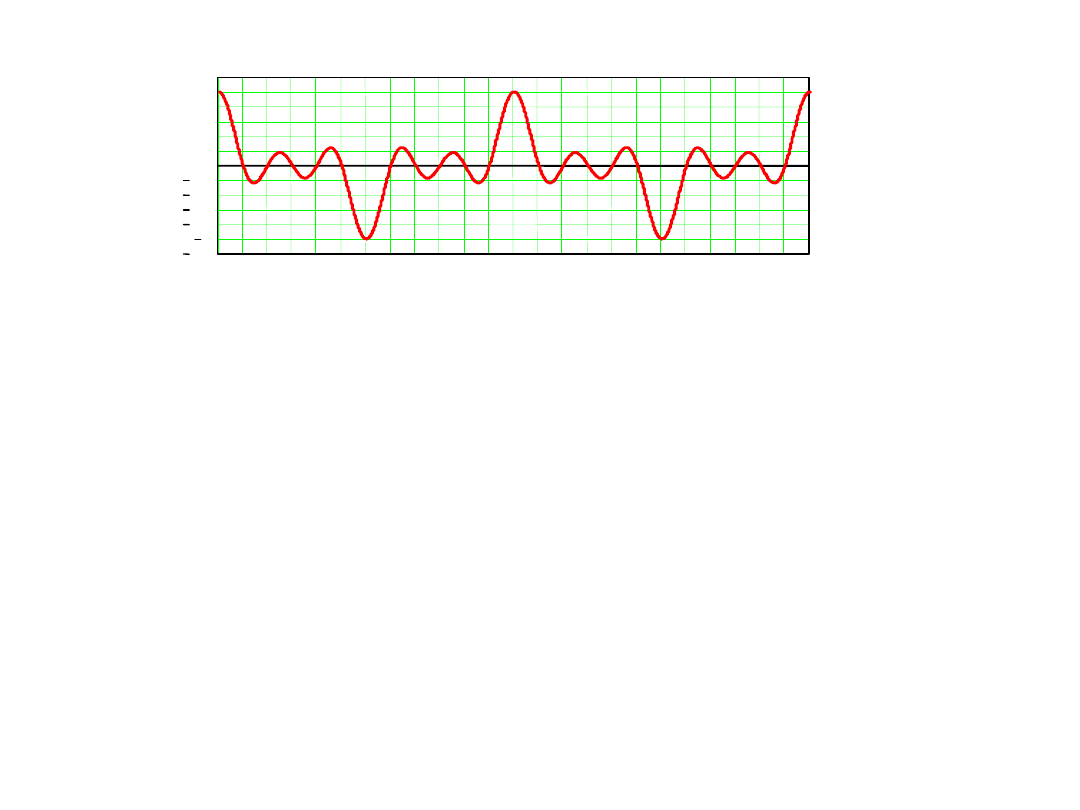
Parametry uśredniania spróbkowanego
sygnału
Przy częstotliwości próbkowania
f
d
=N·f
1
w ciągu jednego
okresu T są uśredniane N próbek sygnału, w wyniku czego będą
eliminowany wpływ (stłumiony) wszystkich harmonicznych z
numerami
od k=1 do k=N-1
.
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1.2
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
ΔU
h,max
(f)
fT
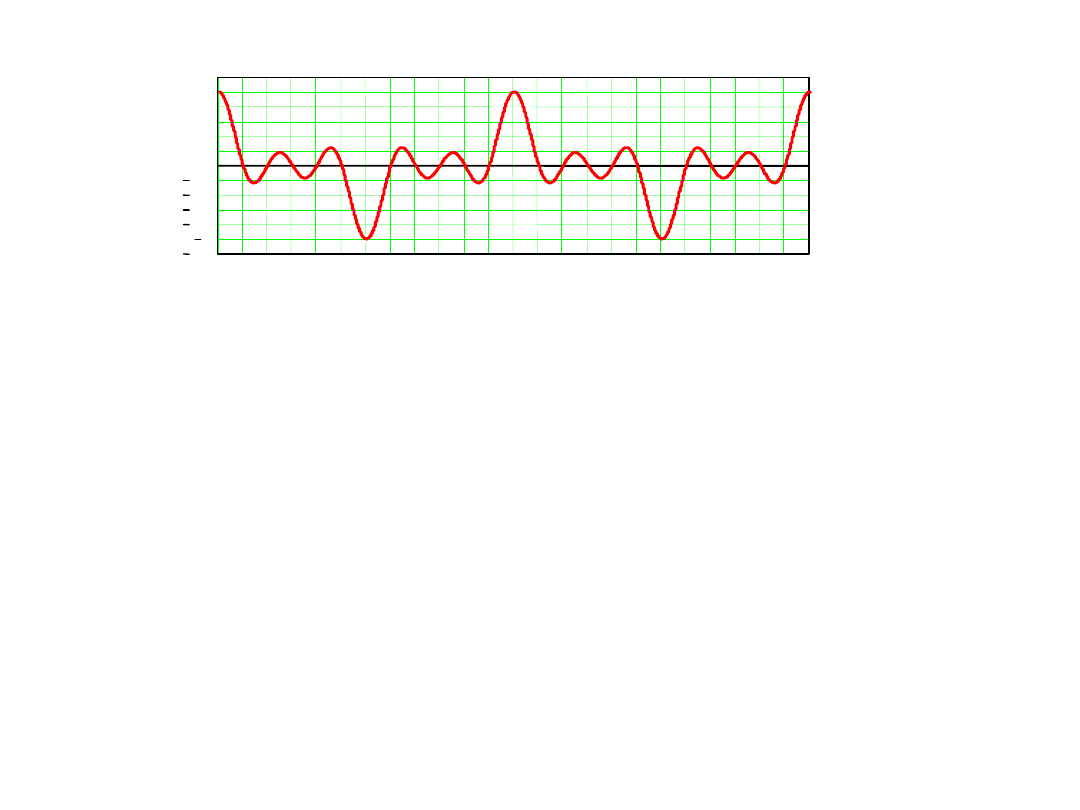
Parametry uśredniania spróbkowanego
sygnału
Innymi słowami, dla eliminowania wpływu (tłumienia)
składowych harmonicznych do
k
-ej włącznie (przy
f
m
=k·f
1
) liczba
uśrednianych próbek (pobranych w jednym okresie sygnału)
powinna być o jeden większą
N
min
=k+1
zamiast N=2k
jak to wynika z
twierdzenia Kotelnikowa
Schannona
.
Minimalna częstotliwość próbkowania powinna równać się
f
d,min
=f
1
·N
min
=f
1
·(k+1)=f
m
+f
1
.
to znaczy, że ona powinna być tylko o
(k+1)
razy zamiast
2·k
razy większą od częstotliwości podstawowej składowej.
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1.2
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1.2
ΔU
h,max
(f)
fT
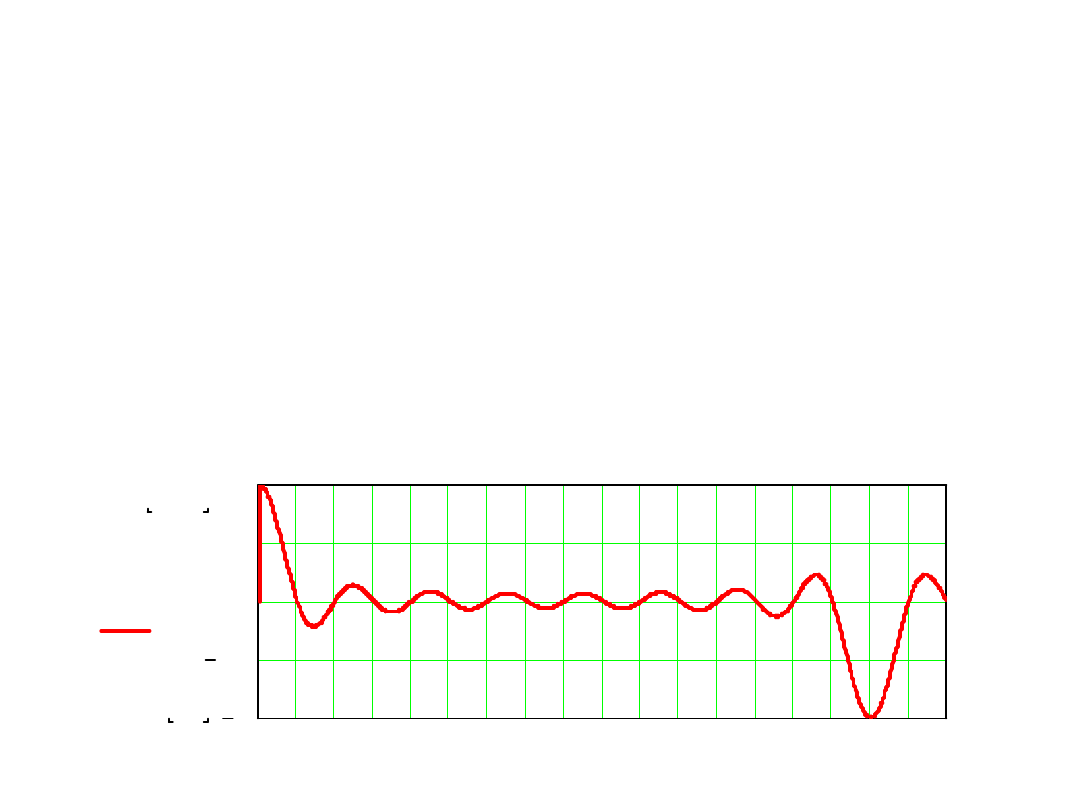
Przykład 1
Wyznaczyć minimalną liczbę próbek oraz częstotliwość
próbkowania sygnału z warunku zapewnienia tłumienia wszystkich
składowych harmonicznych
od 1-ej do 15-tej
, stosując uśrednianie
próbek.
Rozwiązanie. Ponieważ numer maksymalnej składowej
harmonicznej równa się k=15, wtedy minimalna liczba próbek wynosi
N
min
=k+1=15+1=16
.
Częstotliwość próbkowania powinna być o
16
razy większą od
częstotliwości podstawowej składowej zamiast
2·15=30
razy.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
1
0.5
0
0.5
1
0.999
1
Usr16 x
(
)
18
0
x
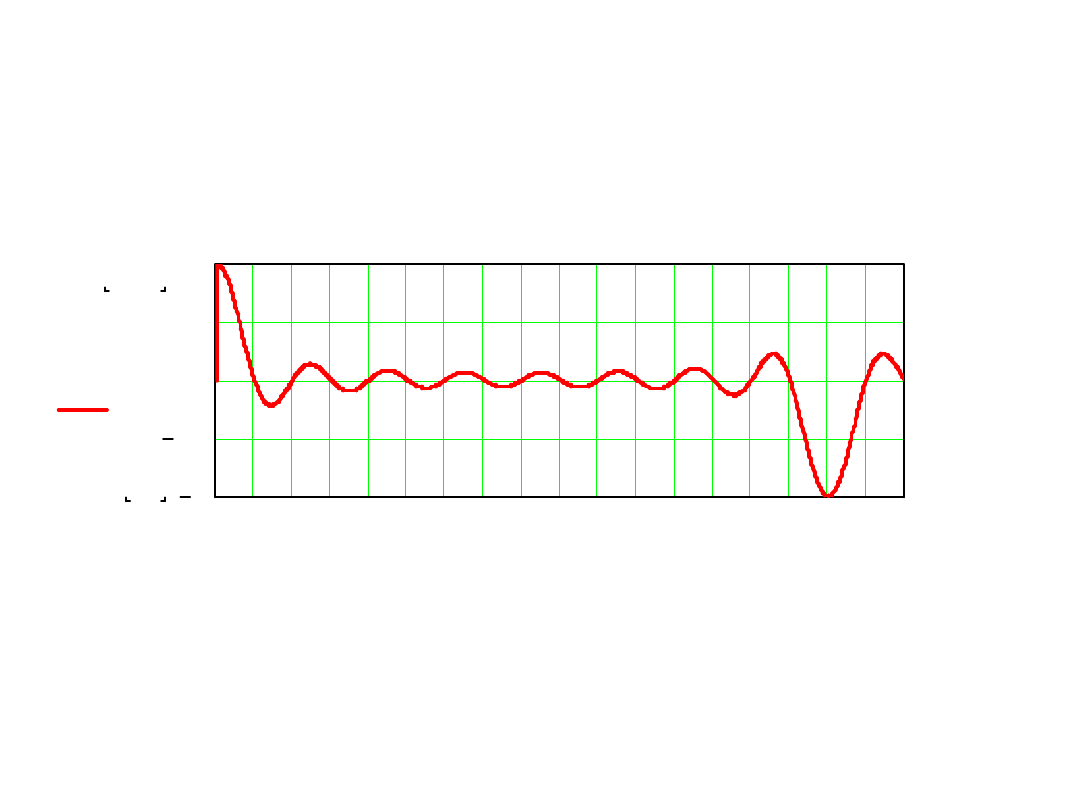
Przykładowo, jeżeli
f
1
=2 kHz
oraz
k=15
maksymalna
częstotliwość
f
m
=15·2 kHz=30 kHz
. Częstotliwość próbkowania
powinna równać się
f
d
=f
m
+f
1
=32 kHz
, zamiast
2·30 kHz=60 kHz
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
1
0.5
0
0.5
1
0.999
1
Usr16 x
(
)
18
0
x
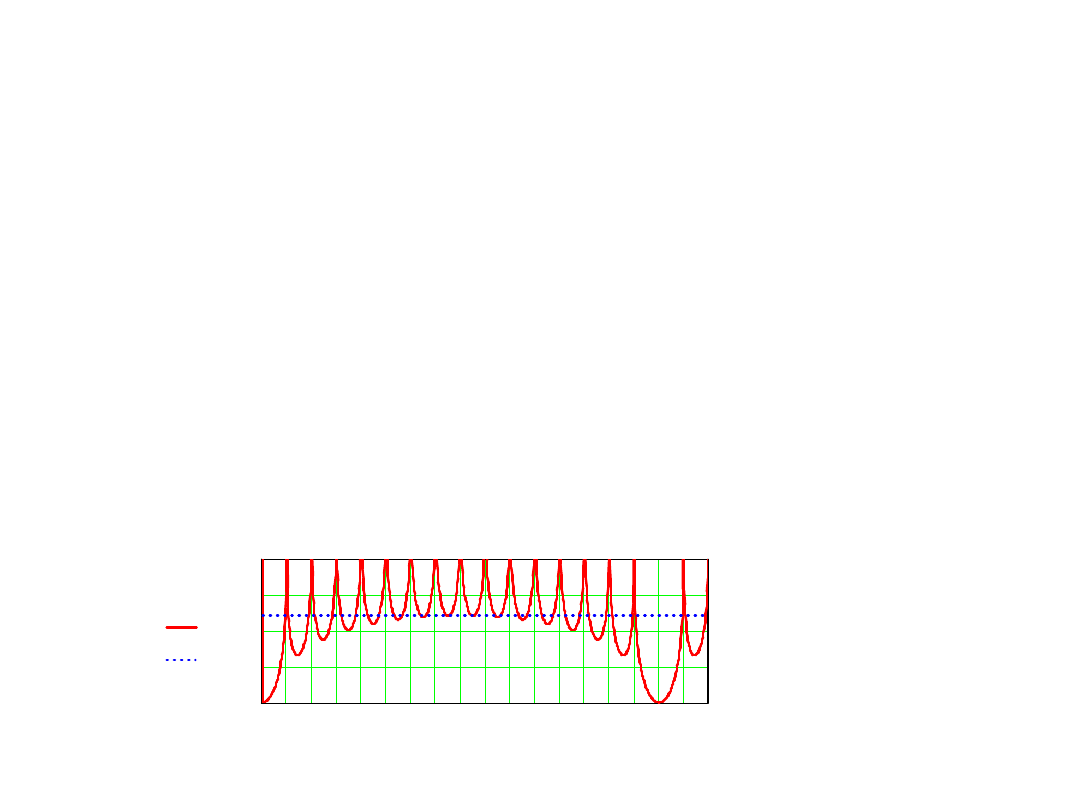
Poziom tumienia
Maksymalny poziom obwiedni współczynnika tłumienia ma
miejsce na częstotliwości równej połowie częstotliwości
próbkowania
f=f
d,min
/2
i ten poziom równa się liczbie próbek N (maksymalny błąd
Δ
u,m
=U
m
/N
):
K
tl
=N
lub
20lg(N)
w decybeli.
Przykładowo, przy
N=16
K
tl,db
=20lg(16)=24 dB
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
0
10
20
30
40
40
0
Ktl 16 x
(
)
KN x
( )
18
0
x
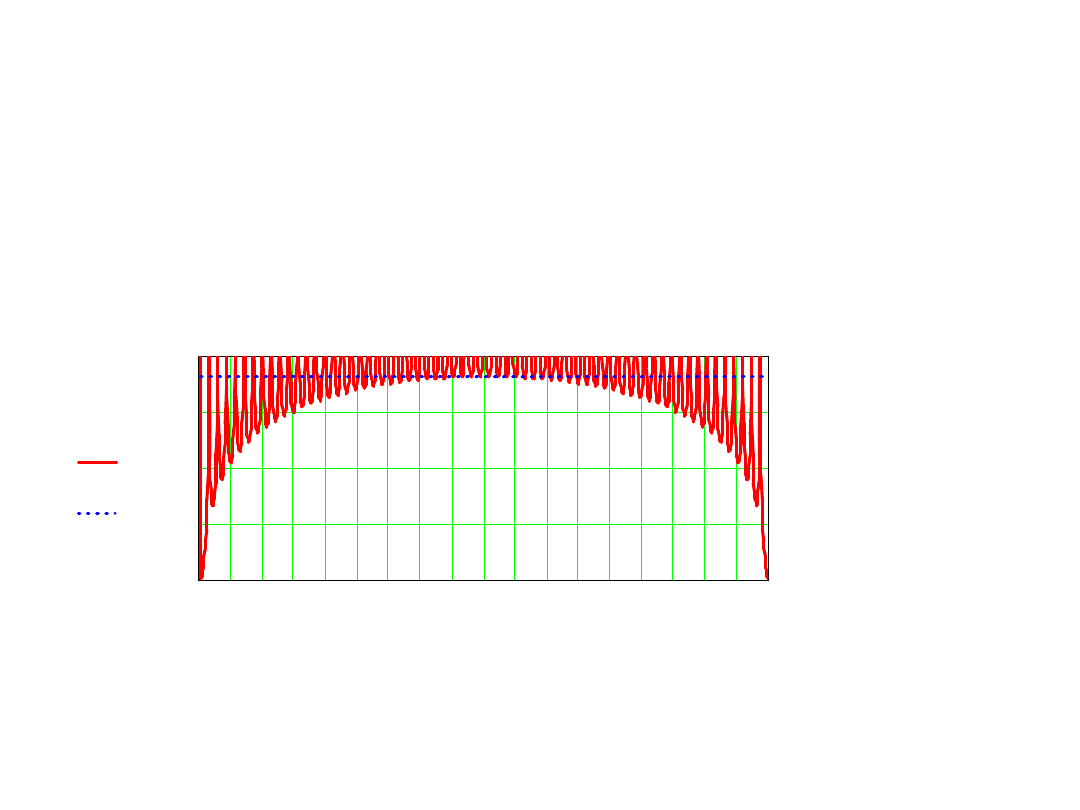
Poziom tumienia
Przy
N=64
K
tl,db
=20lg(64)=36 dB
0 3.567.11
10.67
14.22
17.78
21.33
24.89
28.443235.56
39.11
42.67
46.22
49.78
53.33
56.89
60.4464
0
10
20
30
40
40
0
Ktl 64 x
(
)
KN x
( )
64
0
x

3. Zwiększenie stopnia tłumienia
składowych harmonicznych.
Uśrednianie wagowe
W rzeczywistości
okres sygnału oraz częstotliwości
składowych harmonicznych mogą się zmieniać
lub ich wartości
mogą odbiegać od wartości nominalnych.
W takich przypadkach w wyniku uśredniania składowe
harmoniczne nie będą stłumione (eliminowane) całkowicie, a
pozostanie błąd uśredniania, wartość którego zależy od stopnia
odchylenia okresu (częstotliwości) od nominalnej wartości i jego
można obliczyć według wzoru
.
sin
sin
1
,
max
,
N
T
f
fT
N
U
U
m
h
h
3.1. Małe odchylenia okresu sygnału od
nominalnej wartości
Do małych względnych odchyleń okresu (dla odchyleń
częstotliwości ) będziemy zaliczać taki, dla których są
spełniane warunki:
Założymy, że trwałość rzeczywista okresu sygnału różni się
od nominalnej o :
Ponieważ względne odchylenia okresu i częstotliwości
posiadają różne znaki , to przy nominalnej częstotliwości
podstawowej składowej jej wartość rzeczywista różni na się na :
w takim razie częstotliwości k-tej składowej harmonicznej
sygnału równają się
1
,
1
n
f
n
T
f
f
T
T
T
T
f
T
n
T
T
1
n
n
T
f
/
1
,
1
f
n
T
n
T
n
f
f
T
f
1
1
1
1
,
1
,
1
,
1
1
f
n
k
kf
kf
f
1
,
1
1
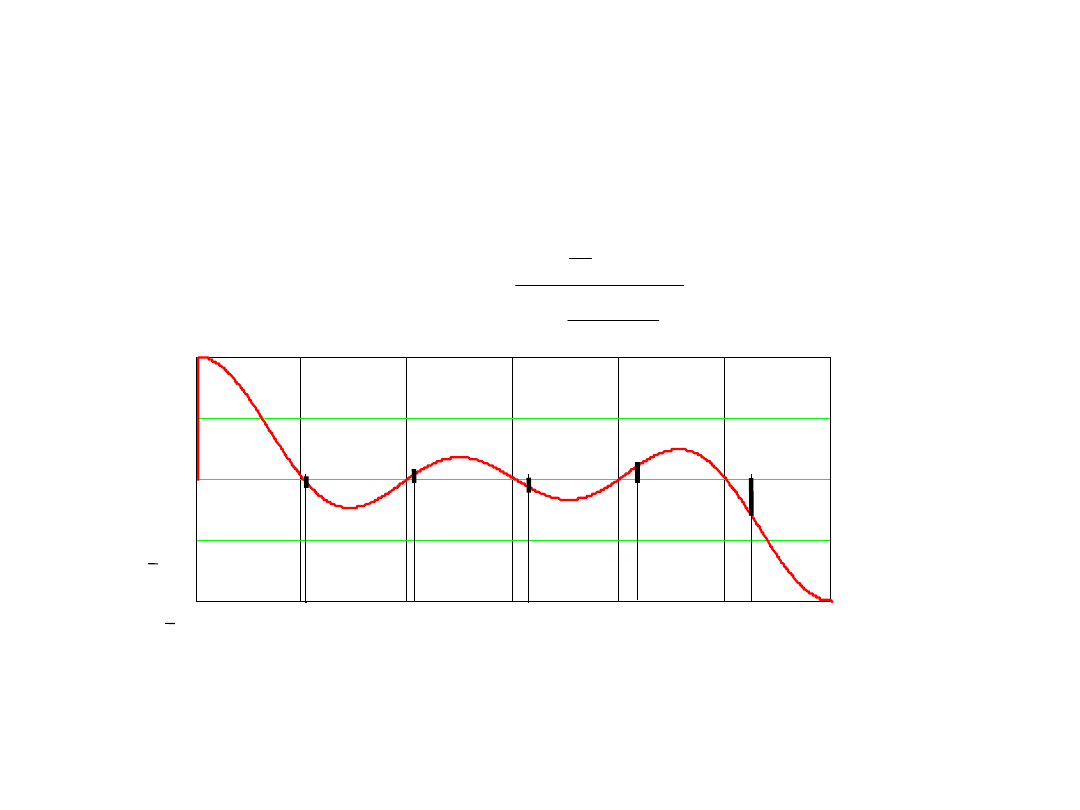
3.1. Małe odchylenia okresu sygnału od
nominalnej wartości
Wtedy przy oraz
wartość maksymalna błędu uśredniania wynosi
Przy δ
f
=+5%
w
artości błędu stanowią:
Δ
1
=-0.05; Δ
2
=0.058; Δ
3
=-0.076; Δ
4
=0.121; Δ
5
=-0.308
N
k
k
N
U
U
f
f
k
m
h
h
1
sin
sin
1
1
,
max
,
1
,
1
n
n
T
f
f
k
T
f
n
n
k
k
k
T
kf
sin
1
sin
1
sin
,
1
0
1
2
3
4
5
6
1
0.5
0
0.5
1
Δ
1
Δ
Usr
f·T
Δ
2
Δ
3
Δ
4
Δ
5
1δ
f
2δ
f
3δ
f
4δ
f
5δ
f
3.1. Małe odchylenia okresu sygnału od
nominalnej wartości
Jeżeli, co ma miejsce dla małych
k
(pierwsze
składowe harmoniczne), oraz
przy
k<<N
maksymalna wartość błędu równa się
Przy tym wartość błędu uśredniania pierwszych składowych
harmonicznych jest proporcjonalna do względnego odchylenia
częstotliwości (okresu).
1
f
k
N
k
N
k
f
1
sin
f
m
h
h
U
U
,
max
,

W7. UŚREDNIANIE CYFROWE
WAGOWE W SZEROKIM PAŚMIE
CZĘSTOTLIWOŚCI.
Funkcja wagowa (okno)
Dolpha-Czebyszewa

Plan wykładu
1. Tłumienie składowych harmonicznych szerokim
paśmie częstotliwościowym. Funkcja wagowa
(okno) Dolpha-Czebyszewa
2. Projektowanie funkcji (okna) Dolpha–Czebyszewa
3. Algorytm obliczania współczynników funkcji
(okna) Dolpha-Czebyszewa z przykaładem
4. Porównanie uśredniania wagowego oraz filtracji
średniej wartości.
5. Parametry częstotliwościowe do projektowania
FW Dolpha-Czebyszewa do pomiaru wybranych
parametrów sygnałów przemiennych
Cel: Zapoznać się z zasadami projektowania uśredniania
z wykorzystaniem funkcji wagowej Dolpha_Czebyszewa
Tłumienie składowych harmonicznych
szerokim paśmie częstotliwościowym.
Funkcja wagowa (okno) Dolpha-
Czebyszewa
Jeżeli
częstotliwość składowych harmonicznych
nie jest stałą i może się zmieniać
niekontrolowanie w szerokim paśmie
, wtedy
wykorzystanie
zwykłych metod uśredniania,
które tłumią zakłócenia okresowe,
częstotliwość których krotna odwrotności czasu
uśredniania,
nie jest wystarczająco
skutecznym.
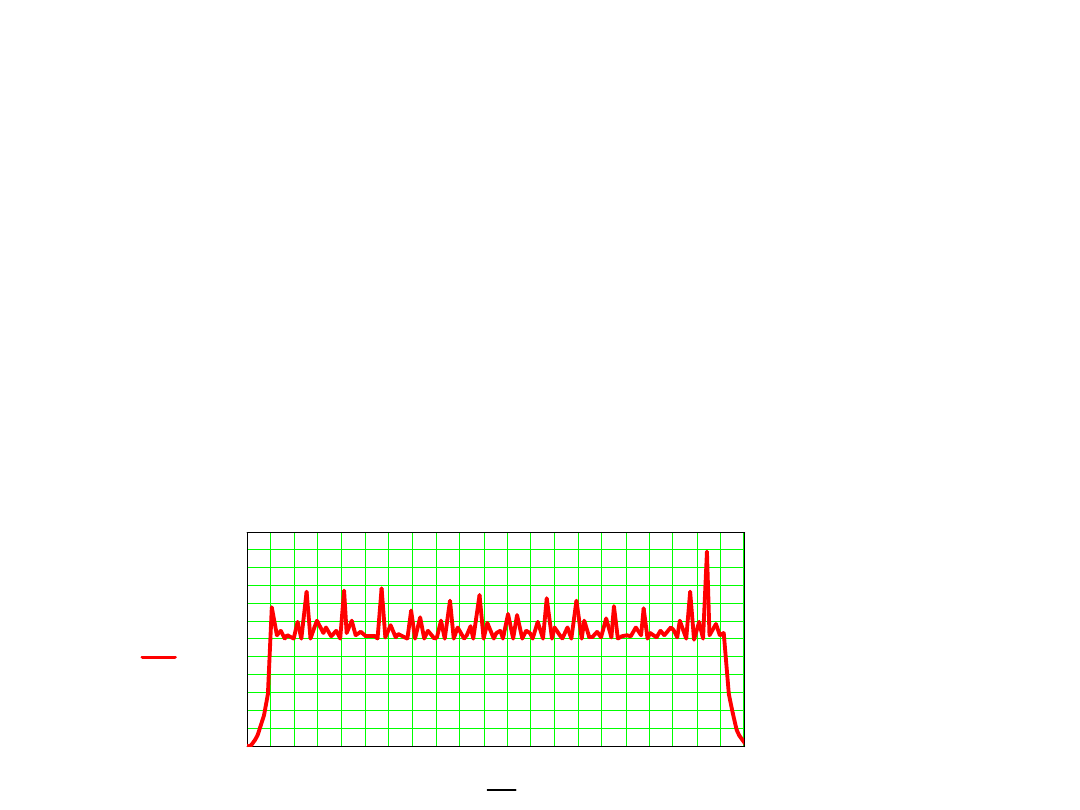
Tłumienie składowych harmonicznych
szerokim paśmie częstotliwościowym.
Funkcja wagowa (okno) Dolpha-
Czebyszewa
Dla tłumienia składowych harmonicznych o nieznanych
częstotliwościach oraz przy ich zmianie w szerokim zakresie – co
ma miejsce przy cyfrowych pomiarach parametrów sygnałów
(wartości średnia wyprostowana, skuteczna, moc czynna oraz
bierna itp.) najlepszy efekt daje zastosowanie funkcji wagowej
(okna) Dolpha- Czebyszewa.
Z pośród innych funkcji wagowych jest to “
najlepsza
” funkcja
wagowa (okno). Jej wykorzystanie zapewnia
zadany poziom
tłumienia Ktl
zakłóceń w
zadanym skończonym zakresie
częstotliwości od dolnej fd do górnej fg. przy minimalnie
możliwym czasie uśredniania Tus
.
0 20 40 60 80100120140160180200220240260280300320340360380400420
0
10
20
30
40
50
60
70
80
90
100
110
120
120
0
Ktl_dBx
( )
420
0
x fd
v0
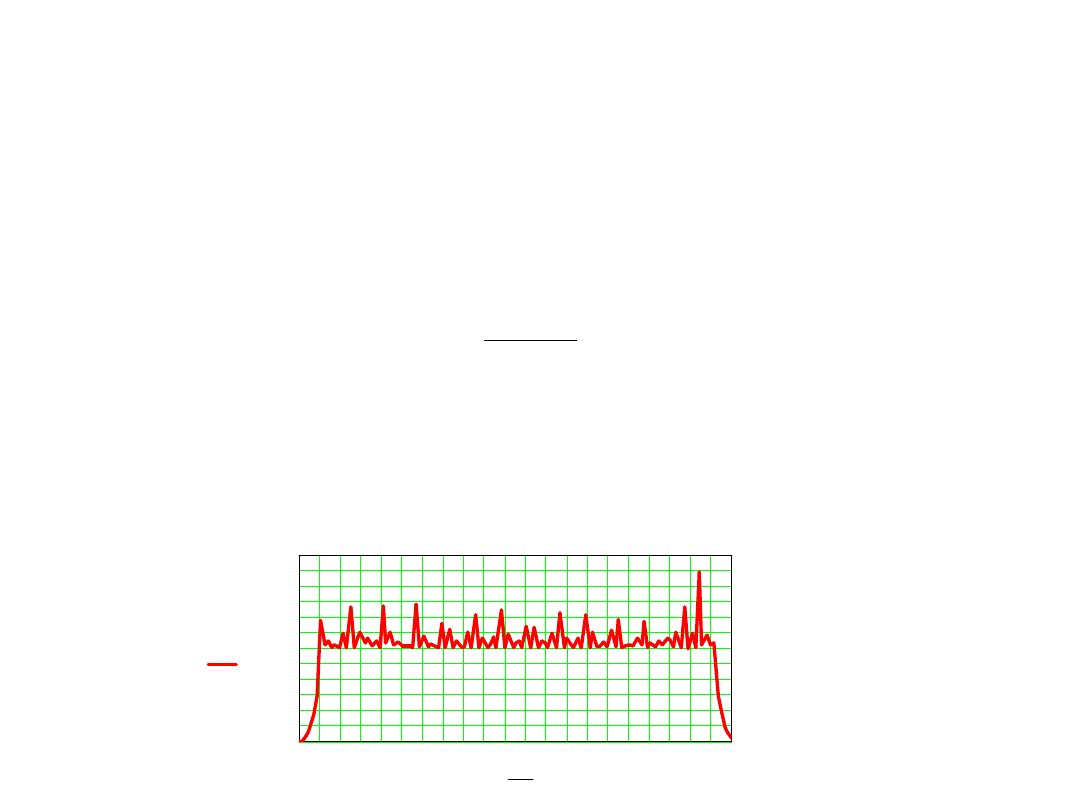
Funkcja wagowa (okno) Dolpha-
Czebyszewa
•Na tym rysunku funkcja wagowa zapewnia tłumienie 60 dB (1000
razy) w zakresie częstotliwości od dolnej fd =20 Hz do górnej
fg=400 Hz.
•Trwałość uśredniania praktycznie zależy tylko od poziomu
tłumienia oraz wartości fd i jest minimalnie możliwą:
•i równa się około
121 ms
dla zadanych wyżej parametrów.
•Nie istnieje innej funkcji wagowej, która zapewni tłumienie minimalnie
60 dB w interwale czasowym mniej niżeli 121 ms
.
0 20 40 60 80100120140160180200220240260280300320340360380400420
0
10
20
30
40
50
60
70
80
90
100
110
120
120
0
Ktl_dBx
( )
420
0
x fd
v0
d
tl
us
f
K
T
)
2
ln(
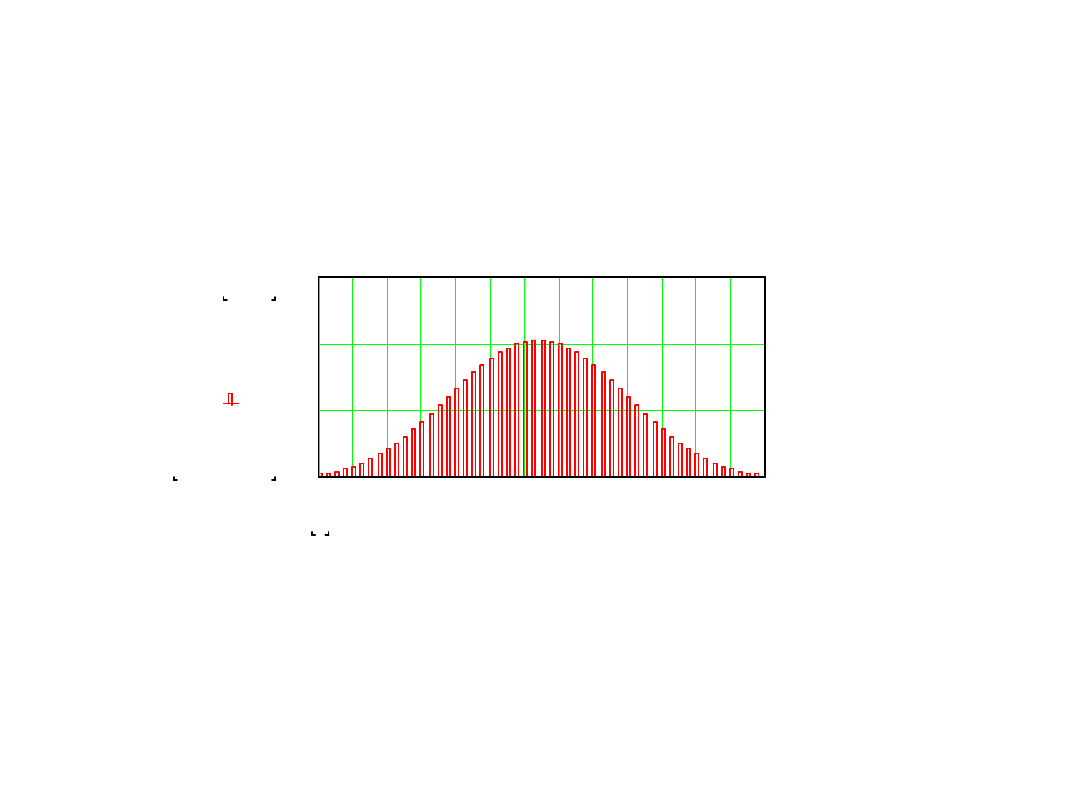
Funkcja wagowa (okno) Dolpha-
Czebyszewa
•Charakterystyczny widok FW Dolpha-Czebyszewa jest pokazana
na rysunku niżej
0 4 8 12 16 20 24 28 32 36 40 44 48 52
0
0.02
0.04
0.06
0.041
8.79110
4
g
in
N
0
in
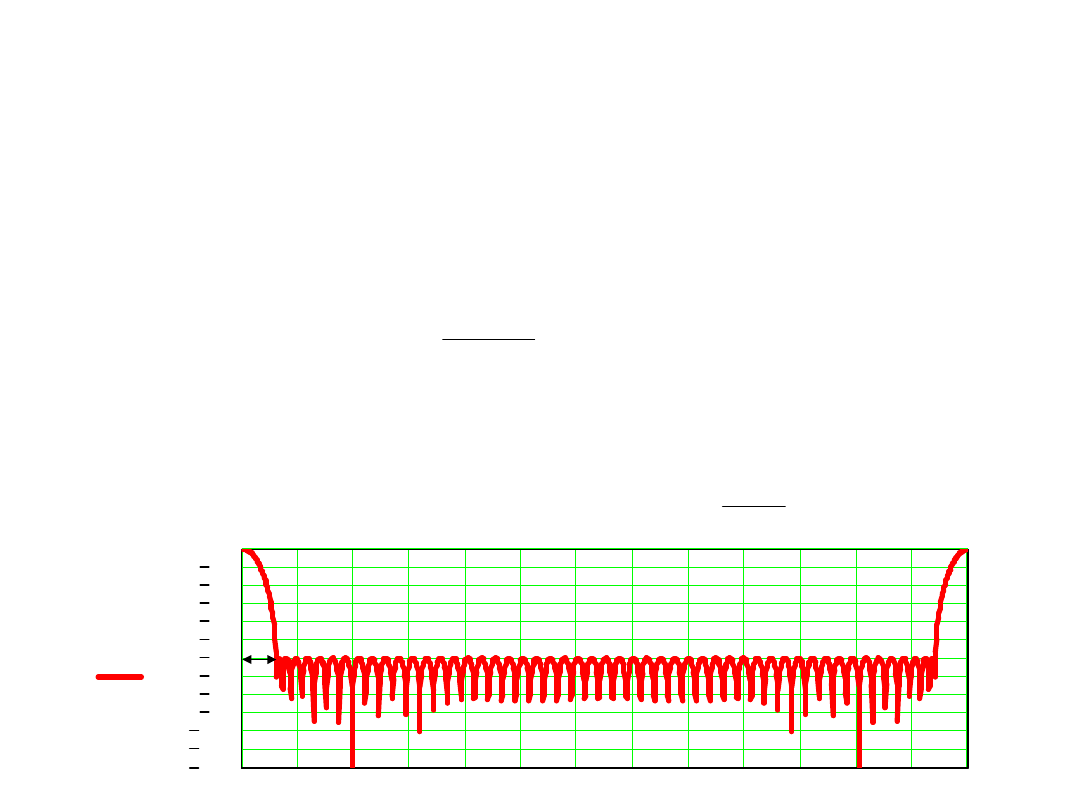
Funkcja wagowa (okno) Dolpha-
Czebyszewa
v0
ln 2Ktl
(
)
v0 2.419
•W dziedzinie częstotliwości FW Dolpha-Czebyszewa minimalizuje
się szerokość listka głównego widma przy założeniu określonej
długości okna oraz przy ograniczeniu dopuszczalnej wysokości
maksymalnego listka bocznego widma .
•
•Przykładowo na rys. niżej pokazano moduł widma FW Dolpha-
Czebyszewa zapewniającej stały minimalny poziom tłumienia 60
dB (1 tysiąc razy) w paśmie częstotliwości od 20 Hz do 400 Hz
wartość szerokości głównego listka równa się:
)
2
ln(
0
tl
K
v
0
4
8
12
16
20
24
28
32
36
40
44
48
52
120
110
100
90
80
70
60
50
40
30
20
10
0
0
120
WF_dBx
( )
n
0
x
v0

2. Projektowanie optymalnej
FW Dolpha–Czebyszewa
Z punktu widzenia realizacji praktycznej uśredniania wagowego
zadanymi parametrami są:
1) poziom tłumienia Ktl
oraz
2) pasmo częstotliwości od fd do fg
;
a
poszukiwanymi parametrami
są:
1) Rząd FW n
;
2) liczba N
(długość) współczynników FW;
3) wartości współczynników w
i
(i=1,2,…,N),
4) częstotliwość próbkowania fs
oraz
5) czas uśredniania Tus
.
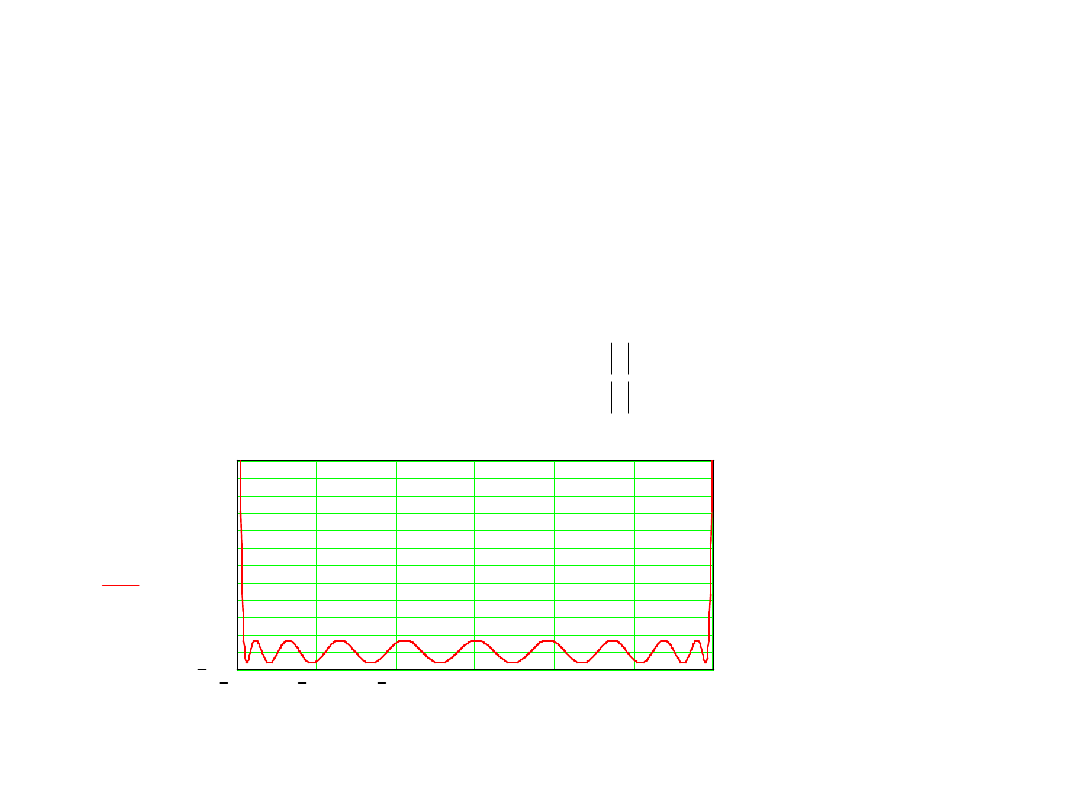
2. Projektowanie optymalnej
FW Dolpha–Czebyszewa
Charakterystyka widmowa funkcji wagowej Dolpha-Czebyszewa o
N współczynnikach gi jest konstruowana na podstawie
wielomiana Czebyszewa rzędu
n=N-1:
1
1
,
)
(
h
arccos
cosh
,
)
arccos(
cos
)
(
x
x
dla
dla
x
n
x
n
x
T
n
1.02
0.68
0.34
0
0.34
0.68
1.02
1.5
0
1.5
3
4.5
6
7.5
9
10.5
12
13.5
15
16.5
16.5
1.5
Tcheb20 x
(
)
1.025
1.025
x
2. Projektowanie optymalnej
FW Dolpha–Czebyszewa
Wartości współczynników tej FW można obliczyć wg wzoru
Gdzie:
parametr, który jest powiązany z szerokością głównego listka
widma zależnością:
1
0
2
0
2
0
)!
1
(
)!
1
(
!
)!
1
(
1
2
i
j
j
j
tl
i
j
i
i
j
n
j
x
j
n
n
K
x
g
n
K
x
tl
)
(
h
arccos
cosh
0
)
2
ln(
)
(
h
arccos
cosh
1
arccos
1
arccos
0
0
tl
tl
K
n
K
n
x
n
2. Projektowanie optymalnej
FW Dolpha–Czebyszewa
Częstotliwość próbkowania sygnału równa się:
fs=fd+fg=fd (D+1)
gdzie
D=fg/fd
jest względnym zakresem częstotliwości
Rząd WF wyznacza się wg. wzoru:
1
cos
1
h
arccos
h
arccos
1
0
D
K
D
n
tl
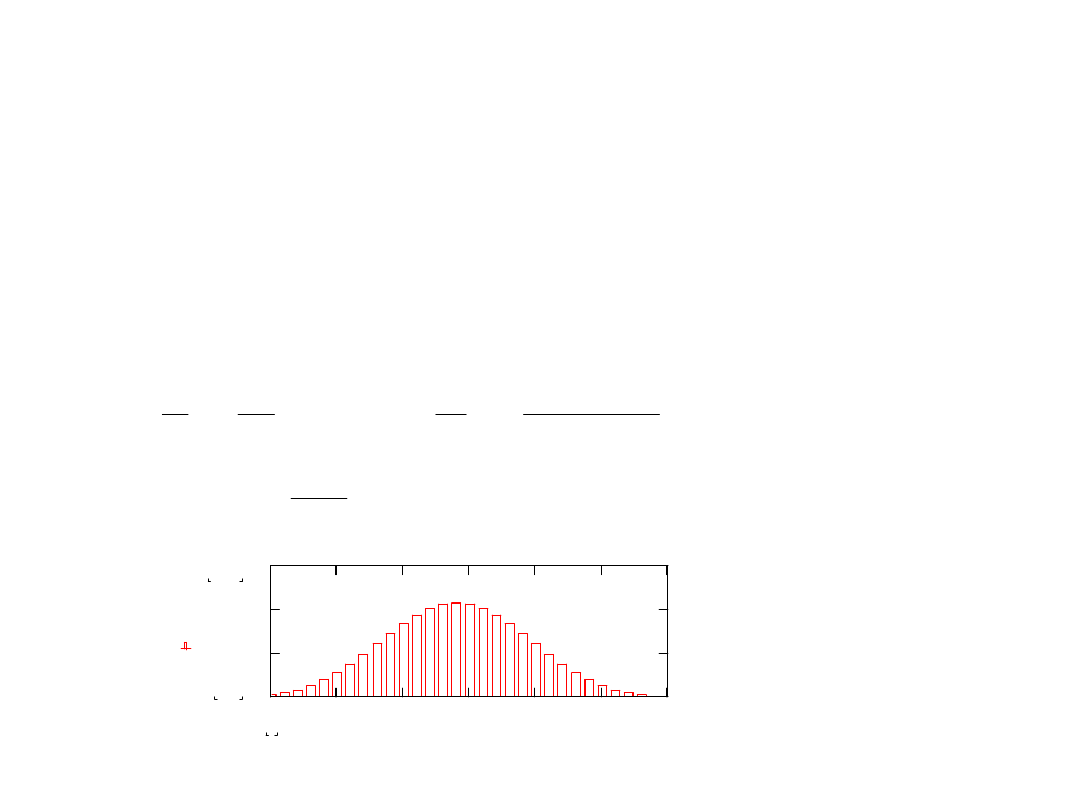
2. Projektowanie optymalnej
FW Dolpha–Czebyszewa
Liczba próbek FW Dolpha-Czebyszewa równa się:
N=n+1
Lepsza dokładność obliczeń (zwłaszcza przy dużych N) otrzymuje
się wykorzystująć odwrotne przekształcenie Fouriera
wielomianu Czebyszowa
N
M
m
k
N
k
x
T
K
N
w
M
k
N
tl
in
)
(
2
cos
cos
2
1
1
0
1
1
2
1
N
M
1
2
0
N
M
m
0
5
10
15
20
25
30
0
1
2
3
2.135
0.04
w
in
n 1
(
)
N 1
0
in
3. Algorytm obliczania współczynników
funkcji (okna) Dolpha-Czebyszewa z
przykaładem
1) Zadano:
2) Obliczanie względnej szerokości pasma tłumienia
3) Obliczanie rzędu wielomianu Czebyszewa
Po zaokrągleniu do wartości całkowitej większej
n=51
4) Obliczanie długości (liczby próbek) FW Dolpha-Czebyszewa
Ktl 1000
fd 20
fg 400
D
fg
fd
D 20
n
acoshKtl
(
)
acosh
1
cos
D 1
N 1 n
N 52
5) Obliczanie wartości parametru
x0
6) Obliczanie wartości współczynników FW Dolpha-Czebyszewa
3. Algorytm obliczania współczynników
funkcji (okna) Dolpha-Czebyszewa z
przykaładem
x0 cosh
acoshKtl
(
)
n
x0 1.011
M
n
2
M 26
in 0 n
w
in
1
n 1
(
)
1
2
Ktl
1
M
k
Tcheb n x0cos
k
n 1
cos
2
k
in M
(
)
n 1
�
0.046
0.050
0.077
0.110
0.152
0.202
0.262
0.332
0.412
0.502
0.710
0.825
0.947
1.073
1.201
1.329
1.456
1.578
1.692
1.797
1.970
2.034
2.081
2.109
2.119
2.109
2.081
2.034
1.970
1.891
1.692
1.578
1.456
1.329
1.201
1.073
0.947
0.825
0.710
0.602
0.412
0.332
0.262
0.202
0.152
0.110
0.077
0.050
0.046
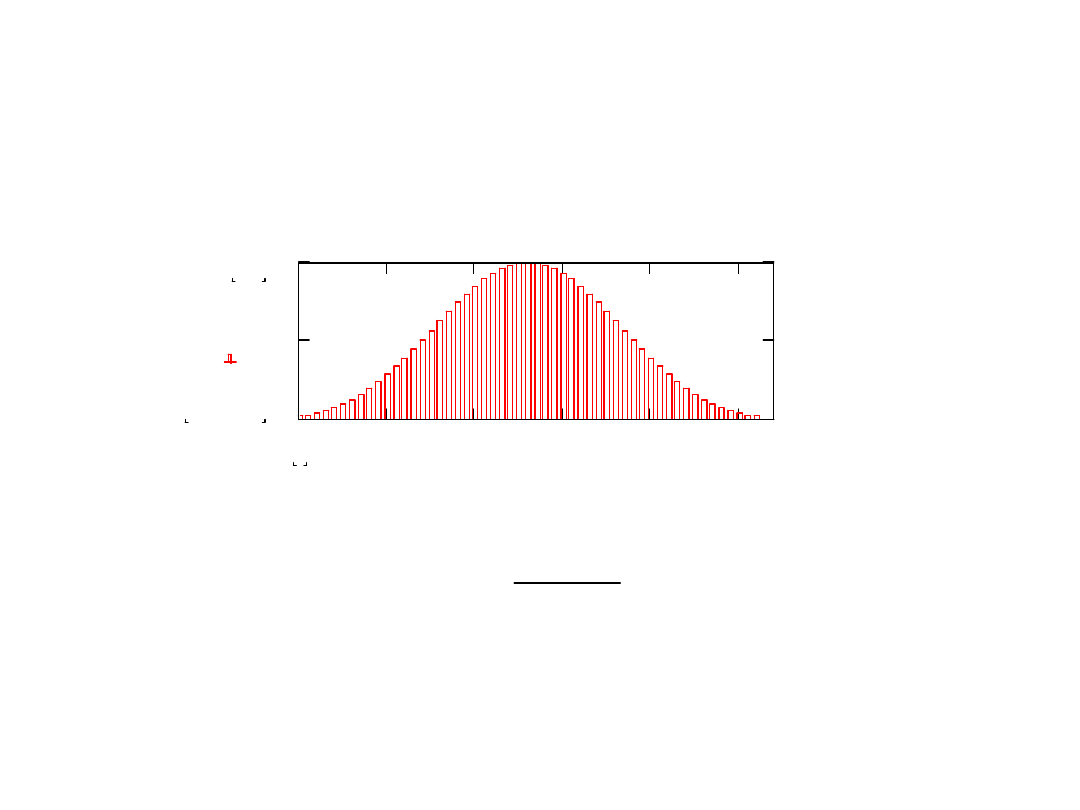
7) Wykres funkcji wagowej
8) Obliczanie charakterystyki widmowej: x=f·T
us
3. Algorytm obliczania współczynników
funkcji (okna) Dolpha-Czebyszewa z
przykaładem
0
10
20
30
40
50
0
0.02
0.04
0.04
8.69710
4
g
in
N 1
0
in
WF x
( )
0
n
in
w
in
cos 2
x in M
(
)
n
�

9) Obliczanie współczynnika tłumienia w decybeli
3. Algorytm obliczania współczynników
funkcji (okna) Dolpha-Czebyszewa z
przykaładem
Ktl_dBx
( )
WF_dBx
( )
0 20 40 60 80100120140160180200220240260280300320340360380400420440
0
10
20
30
40
50
60
70
80
90
100
110
120
120
0
Ktl_dBx
( )
440
0
x fd
v0
10) Obliczanie względnej trwałości uśredniania FW Dolpha-
Czebyszewa
11) Obliczanie trwałości uśredniania FW Dolpha-Czebyszewa
12) Obliczanie częstotliwości próbkowania
•
Obliczanie wyniku przetwarzania jeżeli x
1
,x
2
, x
3
,…,x
N
są
wartościami zarejestrowanymi sygnału badanego
3. Algorytm obliczania współczynników
funkcji (okna) Dolpha-Czebyszewa z
przykaładem
v0
n
acos
1
cosh
acoshKtl
(
)
n
v0 2.411
Tus
v0
fd
Tus 0.121
fp n
fd
v0
fp 431.379
N
i
i
i
X
w
x
N
1
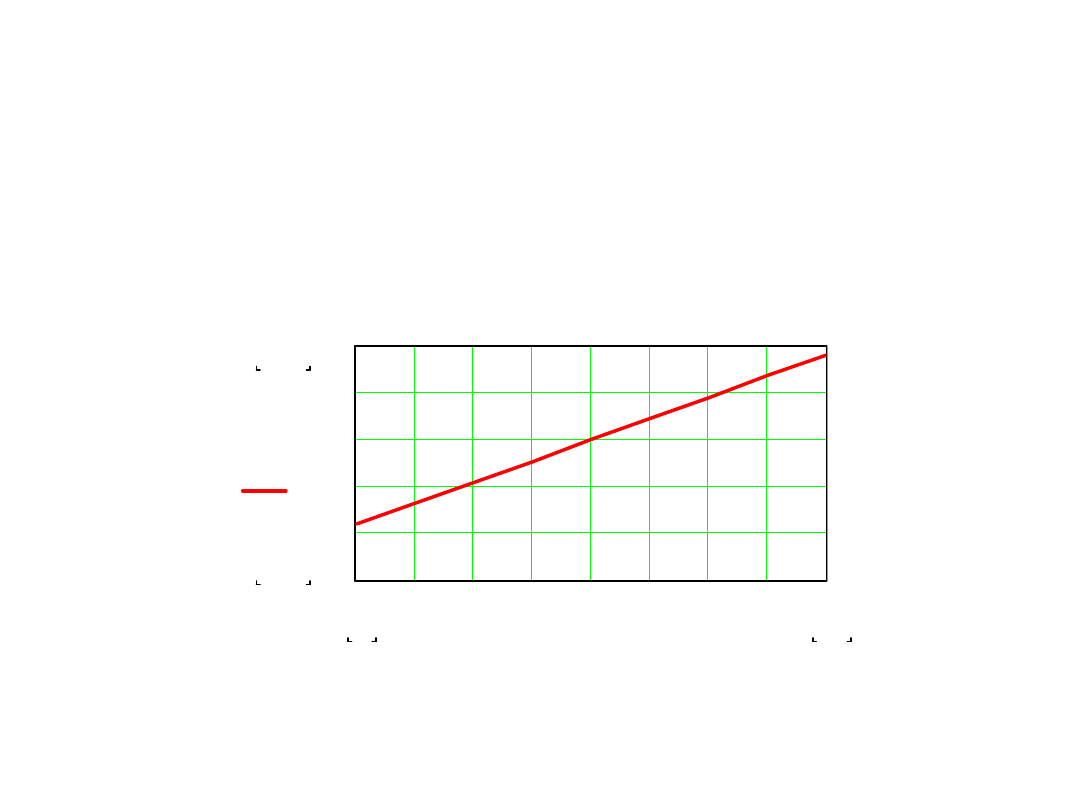
Zależność
względnego
czasu
uśredniania
od
wartości
współczynnika tłumienia
Przy Ktl=50 dB v0=2,054 Tus=v0/fd=41ms
4. Porównanie uśredniania wagowego
oraz filtracji średniej wartości
v_0 0.221 Kdb 0.03665
20
30
40
50
60
70
80
90
100
0
0.8
1.6
2.4
3.2
4
3.834
0.941
v_0
0 ij
100
20
ij 10
20
Pomiar wartości skutecznej
W sygnale pomiarowym jest:
1)
Tylko jedna składowa harmoniczna
o częstotliwości f1w
paśmie od f
dx
do f
gx
:
Przy obliczaniu kwadratu wartości próbek powstaje druga
składowa harmoniczna
Sygnał kwadrowany będzie się mieścić w paśmie
od f
d
=2f
dx
do f
g
=2f
gx
.
2)
Stała składowa U0+ podstawowa składowa harmoniczna o
częstotliwości f
1
+ k składowych wyższych (kf
1
)
w paśmie
od f
dx
do fg: kf
1
<f
gx
.
Sygnał kwadrowany będzie się mieścić w paśmie
od f
d
=f
dx
do f
g
= 2f
gx
.
k
t
kf
Um
t
f
Um
t
f
Um
U
t
u
1
1
2
1
1
1
1
1
2
cos
...
2
2
cos
2
cos
0
)
(
Pomiar mocy czynnej
• W razie cyfrowego pomiaru mocy
parametry
częstotliwościowe analogiczne
jak dla pomiaru
wartości skutecznej
N
I
U
I
U
I
U
I
U
I
U
N
P
N
N
N
i
i
i
...
1
3
3
2
2
1
1
1

Pomiar wartości średniej wyprostowanej
W razie cyfrowego pomiaru wartości średniej wyprostowanej:
1)
Tylko jedna składowa harmoniczna
o częstotliwości f
1
w
paśmie od f
dx
do f
gx
:
Przy obliczaniu modułu (dwu połówkowego prostowania)
wartości próbek powstaje druga składowa harmoniczna +
wyższe składowe harmoniczne, amplituda których maleje
proporcjonalnie do kwadratu numeru harmonicznej.
Jeżeli uwzględniane są k=10 składowych harmonicznych
(poziom 10-j nie przekracza 0,01 od wartości średniej
wyprostowanej) wtedy sygnał wyprostowany będzie się
mieścić w paśmie
od f
d
=2f
dx
do f
g
=2kf
gx
.
2)
Stała składowa U0+ podstawowa składowa harmoniczna o
częstotliwości f
1
+ k składowych wyższych (kf
1
)
w paśmie od
f
dx
do fg: kf
1
<f
gx
.
Po dwu połówkowym prostowaniu sygnału składowe
harmoniczne będą się mieścić w paśmie
od f
d
=f
dx
do f
g
=2kf
gx
.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
- Slide 86
- Slide 87
- Slide 88
- Slide 89
- Slide 90
- Slide 91
- Slide 92
- Slide 93
- Slide 94
- Slide 95
- Slide 96
- Slide 97
- Slide 98
- Slide 99
- Slide 100
- Slide 101
- Slide 102
- Slide 103
- Slide 104
- Slide 105
- Slide 106
- Slide 107
- Slide 108
- Slide 109
- Slide 110
- Slide 111
- Slide 112
- Slide 113
- Slide 114
- Slide 115
- Slide 116
- Slide 117
- Slide 118
- Slide 119
- Slide 120
- Slide 121
- Slide 122
- Slide 123
- Slide 124
- Slide 125
- Slide 126
- Slide 127
- Slide 128
- Slide 129
- Slide 130
- Slide 131
- Slide 132
- Slide 133
- Slide 134
- Slide 135
- Slide 136
- Slide 137
- Slide 138
- Slide 139
- Slide 140
- Slide 141
- Slide 142
- Slide 143
- Slide 144
- Slide 145
- Slide 146
- Slide 147
- Slide 148
- Slide 149
- Slide 150
- Slide 151
- Slide 152
- Slide 153
- Slide 154
- Slide 155
- Slide 156
- Slide 157
- Slide 158
- Slide 159
- Slide 160
- Slide 161
- Slide 162
- Slide 163
- Slide 164
- Slide 165
- Slide 166
- Slide 167
- Slide 168
- Slide 169
- Slide 170
- Slide 171
- Slide 172
- Slide 173
- Slide 174
- Slide 175
- Slide 176
- Slide 177
- Slide 178
- Slide 179
- Slide 180
- Slide 181
- Slide 182
- Slide 183
- Slide 184
- Slide 185
- Slide 186
- Slide 187
- Slide 188
- Slide 189
- Slide 190
- Slide 191
- Slide 192
- Slide 193
- Slide 194
- Slide 195
- Slide 196
- Slide 197
- Slide 198
- Slide 199
- Slide 200
- Slide 201
- Slide 202
- Slide 203
- Slide 204
- Slide 205
- Slide 206
- Slide 207
- Slide 208
- Slide 209
- Slide 210
- Slide 211
- Slide 212
- Slide 213
- Slide 214
- Slide 215
- Slide 216
- Slide 217
- Slide 218
- Slide 219
- Slide 220
- Slide 221
- Slide 222
- Slide 223
- Slide 224
- Slide 225
- Slide 226
- Slide 227
Wyszukiwarka
Podobne podstrony:
bipol obwiednia obciazen materialy stud 2016
ME DLA STUD 2015
Stud Podl 24 2016 J Kozikowski Amnestie w wojewodztwie bialostockim 1945 i 1947
ME auctions ppt
Mat dla stud 2
Wyklad 1' stud
Metabolizm kkw tł stud
strukturalnaMinuchina stud
Tętnice szyjne sem dla stud II
ZO NST 14 ĆW1CZ 1, 2 STUD F F3
kosztkapitału4 stud
6 Mielizna stud nowy
CEMENTY stud
3 Analiza firmy 2015 (Kopia powodująca konflikty (użytkownik Maciek Komputer) 2016 05 20)
Audyt personalny 1a stud
więcej podobnych podstron