
METODY PRZESUWANIA
BIEGUNÓW
Jak wynika z poprzednich rozważań istnieje związek pomiędzy wartościami
własnymi (a tym samym i biegunami) układu zamkniętego a jakością
układu. Bieguny pi (i=1,2,…,n) stabilnego układu zamkniętego leżą w lewej
półpłaszczyźnie zmiennej zespolonej s=α+jω. Bieguny mogą być
rzeczywiste lub zespolone: pi= αi+jωi. Jeśli bieguny rzeczywistego układu
zamkniętego mają części urojone, to wówczas występują parami jako
zespolone sprzężone, czyli: pi1,2= αi±jωi. Bieguny układu stabilnego mają
ujemną część urojoną α.
Jak wiemy odpowiedź układu liniowego jest sumą odpowiedzi wszystkich
modów, z których każdy jest związany z jedną z wartości własnych
(biegunów) układu, czyli:
.
Z powyższej zależności wynika, że dla układów stabilnych każda αi musi
być ujemna, aby odpowiedź zanikała w czasie. Co więcej, jeśli będzie co do
modułu (wartości bezwzględnej) rosła, to proces przejściowy będzie ulegał
skróceniu. Z drugiej strony ω decyduje o częstości oscylacji odpowiedzi
układu. Dla rosnącego ω rośnie częstość oscylacji (układ ma coraz mniejsze
stałe czasowe). Bieguny leżące na osi rzeczywistej generują odpowiedź
aperiodyczną, podczas, gdy bieguny leżące na urojonej dają składowe
odpowiedzi o nie gasnących oscylacjach (rys.).
)
cos
(sin
1
1
t
j
t
e
A
e
C
y
i
i
n
i
t
i
n
i
t
p
i
ii
i
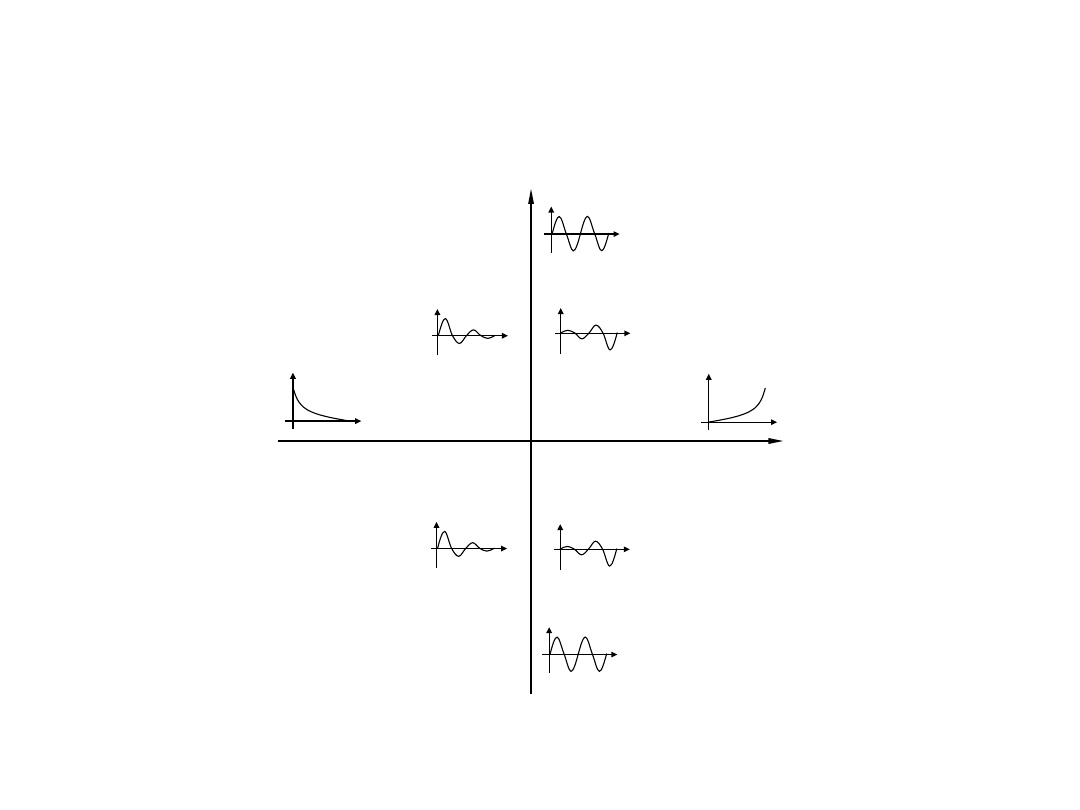
Przebieg procesu przejściowego w
zależności od położenia bieguna
x
x
x
x
x
x
x
x
α
jω
Położenia biegunów
•
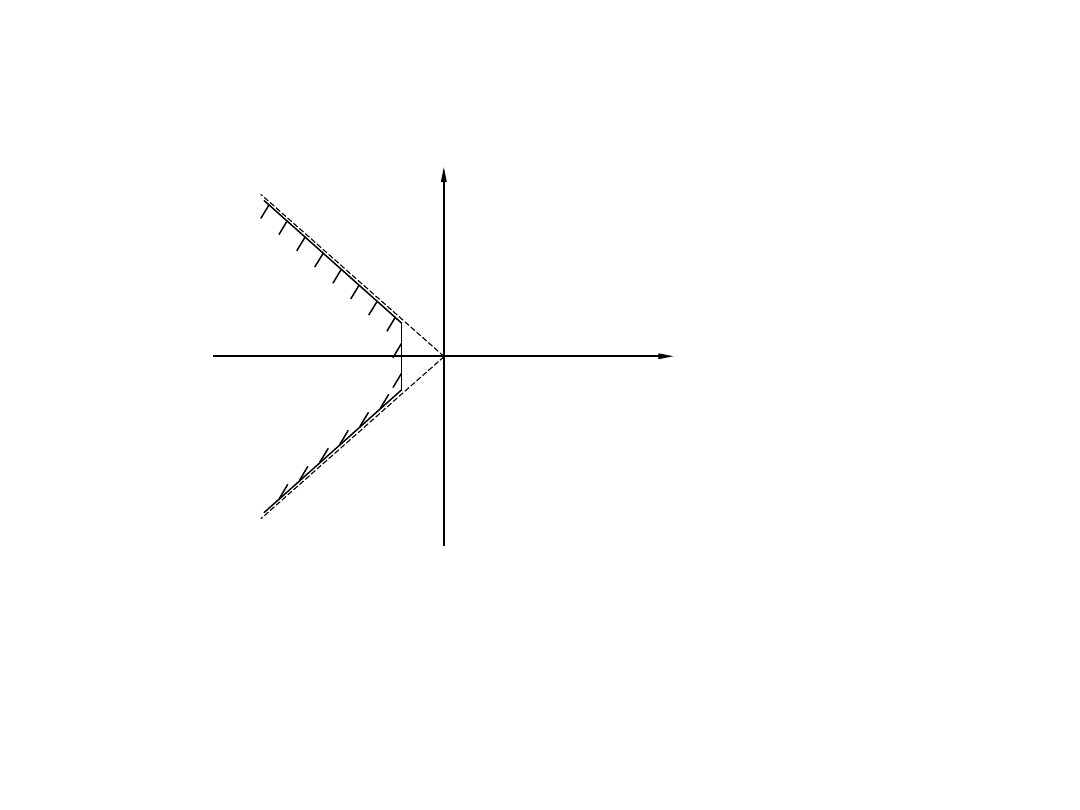
Rys. Pożądana lokalizacja biegunów układu zamkniętego
• Od projektowanego układu sterowania zazwyczaj wymaga się, aby bieguny układu
zamkniętego leżały w narzuconej części lewej półpłaszczyzny zmiennej zespolonej s.
Najczęściej ta podprzestrzeń ma charakter pokazany na rys. Dla układu liniowego
wyższego rzędu odpowiedź układu jest superpozycją poszczególnych składowych
odpowiedzi. Często zdarza się, że układ ma dominującą odpowiedź drugiego rzędu. W tym
przypadku rozmieszczenie wartości własnych (biegunów) jest następujące: dwie wartości
własne zespolone sprzężone leżą stosunkowo blisko osi urojonych, podczas gdy pozostałe
leżą daleko na lewo w lewej półpłaszczyźnie. Im większa jest separacja tym lepsza jest
aproksymacja układu przez układ drugiego rzędu.
x
x
α
j
ω
x
Dobre
lokalizacj
e
0
0

Metoda linii
pierwiastkowych
• Rozważmy przypadek, gdzie jeden parametr układu regulacji
jest nieznany. Tym parametrem może być współczynnik
wzmocnienia regulatora lub dowolny inny jego parametr. Ale
równie dobrze może być to dowolnie wybrany parametr
obiektu, przy założeniu, że parametry regulatora są znane. W
tym ostatnim przypadku możemy badać wrażliwość układu
zamkniętego na zmiany tego parametru. Zauważmy, że
wszystkie bieguny układu zamkniętego są funkcją tego
parametru. Można funkcje te przedstawić na płaszczyźnie
zmiennej zespolonej s. Otrzymane linie nazwiemy liniami
pierwiastkowymi, gdyż po nich poruszają się pierwiastki
równania charakterystycznego (bieguny) układu
zamkniętego wraz ze zmianą parametru. Takie linie nazywa
się również miejscami geometrycznymi wartości własnych.
To ostatnie jest słuszne, przy założeniu, że układ jest
całkowicie sterowalny i obserwowalny.
Wyznaczanie linii pierwiastkowej
• Graficzna metoda wykreślania linii pierwiastkowych została
zaproponowana przez Evansa i zostanie ona przedstawiona w tym
rozdziale. Rozważmy transmitancję układu otwartego w postaci
kanonicznej czynnikowej:
• gdzie:
• Współczynnik K jest tą zmienną, której wartość (spełniającą
narzucone wymagania) należy określić. Równanie
charakterystyczne układu zamkniętego przybiera postać:
• lub
•
• przy czym:
n
j
j
m
i
i
p
s
z
s
K
s
G
1
1
.
,
j
j
j
i
i
i
j
p
j
z
0
)
(
1
s
KG
o
,
0
dla
,
1
)
(
K
K
s
G
o
.
,
1
1
m
n
p
s
z
s
s
G
n
j
i
m
i
i
o

• W ogólnym przypadku jest liczbą zespoloną, czyli wektorem na
płaszczyźnie zmiennej zespolonej s. Na bazie równań transmitancja
powinna więc spełniać dwa warunki; na kąt położenia wektora:
• i na jego moduł:
•
• Z tych warunków wynika następująca trzyetapowa procedura znajdowania
pierwiastka równania.
• 1. Na płaszczyźnie zmiennej zespolonej s nanosimy zera i bieguny układu
otwartego. Bieguny zazwyczaj zaznacza się krzyżykiem, a zera - kółkiem
Liczba zer fizycznie realizowalnego układu otwartego jest równa lub
mniejsza od liczby biegunów, czyli m≤n.
• 2. Metodą prób i błędów szukamy na płaszczyźnie s punktu P, który
spełnia warunek na kąt. W każdej z prób dodajemy (dla zer) i odejmujemy
(dla biegunów) kąty mierzone na płaszczyźnie s. Kąty odmierzane są od
osi rzeczywistej w kierunku przeciwnym do ruchu wskazówek zegara.
• 3. Po znalezieniu punktu P spełniającego w przybliżeniu warunek na kąt
możemy policzyć K z warunku na moduł. Obliczanie K sprowadza się do
mnożenia (od biegunów) i dzielenia (od zer) odcinków na płaszczyźnie s.
Linie pierwiastkowe wykreślamy łącząc kilka w ten sposób otrzymanych
punktów P. Typowe kształty krzywych pierwiastkowych pokażemy na kilku
przykładach.
calkowita
liczba
-
N
,
360
180
)
(
arg
N
s
G
o
o
o
.
1
)
(
K
s
G
o
)
(s
G
o
)
(s
G
o
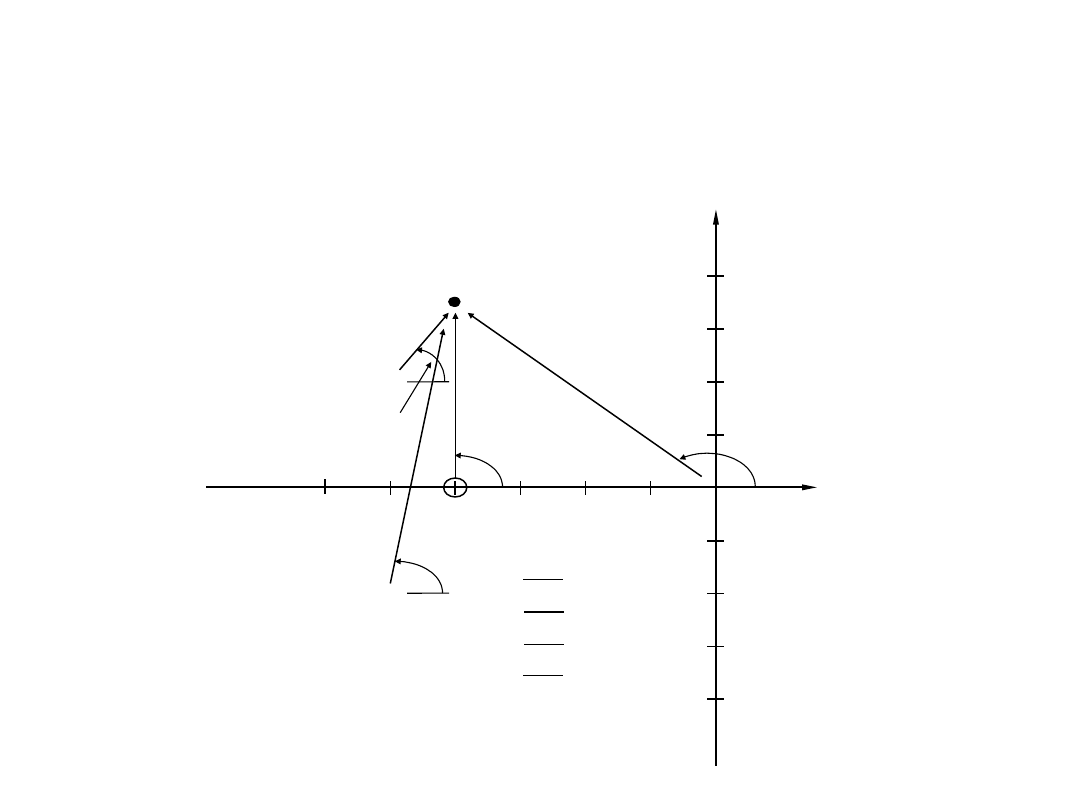
Poszukiwanie punktu na l. p.
• Rys
Re
Im
x
x
x
P
2
4
-2
-4
-2
-6
z
1
β
1
β
2
β
3
α
p
1
p
3
p
2
(s-p
1
)=s
(s-p
2
)
(s-p
3
)
(s-z
1
)
z
1
P = 3,4
p
1
P = 5,2
p
2
P = 1,6
p
3
P = 5,5
Przykład 19.1
•
Iloczyn transmitancji obiektu i regulatora wyraża wzór:
•
Wykreślić linie pierwiastkowe dla powyższego obiektu. Równaniem charakterystycznym
układu zamkniętego jest:
•
,
•
.
•
Rozwiązując równanie kwadratowe otrzymujemy wzór na obliczanie pierwiastków
równania charakterystycznego:
•
•
M-plik do przykładu 19.1
•
clear;clc;clf;
•
s=zpk('s');
•
%rlocfind(Gm)
•
Kc=1;
•
Gm=Kc/((2*s+1)*(5*s+1));
•
%pierwiastki równania charkaterystycznego
•
eig(Gm)
•
%wykres linii pierwiastkowych
•
figure(1);
•
rlocus(Gm,'b-');grid;%axis('image');
•
r = rlocus(Gm,[0,0.2,0.5]);hold on;
•
id1=plot(r,'rs');set(id1,'LineWidth',1.5);hold off;
•
df=char('Kc=0','Kc=0.2','Kc=0.5');
•
for i=1:1:(length(r)*length(eig(Gm)));
•
j=[1,1,2,2,3,3];
•
text(real(r(i))-real(r(i))*0.05, imag(r(i)),df(j(i),:),'FontSize',11,'Color','k','FontWeight','bold');
•
end;
( )
( )
(2 1)(5 1)
c
M
K
B s G s
s
s
=
+
+
0
)
(
)
(
1
s
G
s
B
M
1
0
(2 1)(5 1)
c
K
s
s
+
=
+
+
2
10
7 1
0
c
s
s
K
+ + +
=
3 1
4 5
5 5
c
s
K
=- �
-
Lokalizacja biegunów i zer

Komentarz do przykładu 1
• Gdy Kc = 0, pierwiastki równania charakterystycznego wynoszą: –
1/5, –1 (są to bieguny transmitancji układu w stanie otwartym). Gdy
Kc = 0÷4/5, oba pierwiastki są rzeczywiste i leżą na ujemnej półosi
rzeczywistej. Układ zamknięty ma tłumienie krytyczne przy
wzmocnieniu Kc = 4/5, gdyż oba pierwiastki są rzeczywiste i równe.
Dla każdej większej wartości Kc pojawiają się pierwiastki zespolone.
Gdy Kc zmienia się w granicach od 4/5 do -∞, wówczas części
rzeczywiste obu pierwiastków są stałe i równe –3/5, a części urojone
przybierają wartości od plus do minus nieskończoności. W miarę
wzrostu Kc, układ staje coraz bardziej niedotłumiony. Rozpatrywany
układ zamknięty zawsze jest stabilny, gdyż pierwiastki równania
charakterystycznego nigdy nie przechodzą do prawej półpłaszczyzny
zespolonej.
• Przypuśćmy teraz, że należy zaprojektować układ o współczynniku
tłumienia równym 0,707. Z równania (8.22) otrzymujemy:0,707 =
450. Aby znaleźć odpowiednią wartość wzmocnienia regulatora,
musimy wyznaczyć punkt przecięcia wykresu linii pierwiastkowych z
prostą wychodzącą z początku układu współrzędnych i nachyloną
pod kątem 450 do ujemnej półosi rzeczywistej. Części urojona i
rzeczywista szukanego pierwiastka muszą być równe, stąd Kc =
13/5. Stała czasu układu zamkniętego odpowiadająca tej wartości
wzmocnienia wynosi T=5/3.
Przykład 2
• Załóżmy, że transmitancja pewnego układu zamkniętego różni się od poprzedniej
dodatkowym zerem (obecnością członu przyspieszającego fazę):
• Zbudować wykresy linii pierwiastkowych. Przeprowadzić dyskusję celem wybrania
wzmocnienia zapewniającego pożądane właściwości dynamiczne.
• Rozwiązanie
• Równanie charakterystyczne układu zamkniętego jest postaci:
• .
• Pierwiastkami równania są:
• Dla małych wartości wzmocnienia Kc wyrażenie podpierwiastkowe będzie dodatnie
i oba pierwiastki będą rzeczywiste. Podobnie dla bardzo dużych wartości
wzmocnienia dominować będzie wyraz zawierający i znów oba pierwiastki będą
rzeczywiste. Dla pośrednich wartości Kc wyrażenie podpierwiastkowe będzie
ujemne, a pierwiastki przyjmą wartości zespolone.
)
1
5
)(
1
(
)
1
2
1
(
)
(
)
(
s
s
s
K
s
G
s
B
c
M
1
(
1)
2
1
( )
( ) 1
(
1)(5 1)
c
M
K
s
B s G s
s
s
+
+
= +
+
+
2
5
(6
)
1 0
2
c
c
K
s
s K
+ +
+
+ =
16
14
4
10
1
20
5
3
2
2
,
1
c
c
c
K
K
K
s
2
c
K
Przykład 2
•
Zakres wartości Kc, dla których równanie charakterystyczne będzie miało pierwiastki zespolone, znajdujemy
rozwiązując równanie:
•
gdzie: Kc1 – mniejsza wartość Kc, dla której wyrażenie
•
podpierwiastkowe równa się zeru; Kc2 – większa wartość Kc,
•
dla której wyrażenie podpierwiastkowe równa się zeru.
•
Wykres linii pierwiastkowych pokazano na rys.
•
•
Zauważmy, że dodanie do układu członu przyspieszającego fazę przesuwa wykres linii pierwiastkowych w głąb lewej
półpłaszczyzny zespolonej, a więc w kierunku poprawy stabilności układu. Gdy wzmocnienie dąży do
nieskończoności, dwie gałęzie linii pierwiastkujących dążą do minus nieskończoności i do wartości s = -2, czyli zera
transmitancji. Dla Kc równego zeru pierwiastki równania charakterystycznego równają się biegunom transmitancji
układu w stanie otwartym. Układ w stanie zamkniętym pozostaje stabilny dla wszystkich wartości wzmocnienia.
Najszybsze odpowiedzi dynamiczne układu można otrzymać stosując wzmocnienie Kc = Kc2, dla którego oba
pierwiastki są rzeczywiste i równe.
0
16
14
4
2
c
c
K
K
;
5
12
28
1
c
K
5
12
28
2
c
K
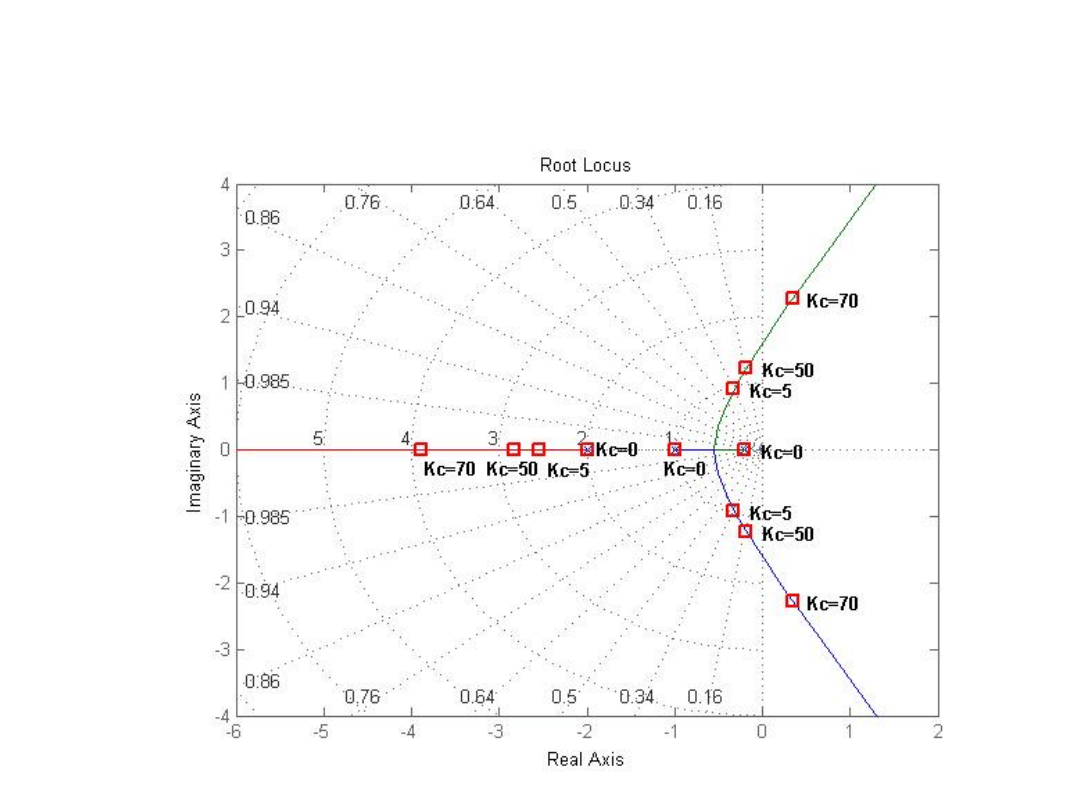
Przykład.3
• Wyznaczanie linii pierwiastkowym z członem przyśpieszającym i opóźniającym fazę
• Do układu rozważonego w przykładzie 19.2 dołączymy człon opóźniający fazę
(dodajmy dodatkowy biegun):
• Przedstawić zachowanie dynamiczne układu dla różnych wartości wzmocnienia Kc.
• Równanie charakterystyczne układu zamkniętego:
•
,
•
.
• Wykres linii pierwiastkowych pokazano na rys. Sposób obliczania pierwiastków
powyższego równania charakterystycznego wyjaśnimy w następnej części.
• Efektem dołączenia do układu członu opóźniającego fazę jest przesunięcie linii
pierwiastkowych w prawo, czyli w kierunku niestabilności. Wykres pierwiastków
równania charakterystycznego składa się z trzech linii. Dwie z nich o początku w
punktach s = 1/5 i s = -1 przyjmują zespolone wartości sprzężone i przechodzą do
prawej półpłaszczyzny. Układ w stanie zamkniętym staje się więc niestabilny dla
wartości Kc > Ku.
1
2
1
)
1
5
)(
1
(
)
(
s
s
s
K
s
KG
c
o
1
2
1
)
1
5
)(
1
(
1
)
(
1
s
s
s
K
s
KG
c
o
0
1
2
13
8
2
5
2
3
c
K
s
s
Przykład 3

Konstrukcja linii pierwiastkowych
•
Kreślenie linii pierwiastkowych dla układów pierwszego i drugiego rzędu nie
przedstawia większych trudności, gdyż pierwiastki odpowiadających im równań
charakterystycznych dają się wyznaczyć jako funkcje wzmocnienia regulatora. Dla
układów wyższych jest to żądanie trudniejsze. W tym przypadku korzystamy z
metody Evansa, który opracował podstawowe reguły wykreślania linii
pierwiastkowych.
1.
Krzywe pierwiastkowe są symetryczne względem osi rzeczywistej.
2.
Linie pierwiastkowe zaczynają się zawsze (Kc = 0) w punktach odpowiadających
biegunom transmitancji układu otwartego.
3.
Linie (w ilości m) kończą się (Kc = ∞) w punktach odpowiadających zerom Go(s). Gdy
m<n, to mamy n-m asymptot wychodzących ze wspólnego punktu, do których
zmierzają (do nieskończoności) pozostałe krzywe.
4.
Liczba linii pierwiastkowych równa się rzędowi układu, czyli liczbie biegunów Go(s).
Niektóre gałęzie linii pierwiastkowych mogą się wzajemnie przecinać, lecz nie
nakładają się nigdy w skończonym zakresie wartości Kc.
5.
Części linii będące wykresami pierwiastków zespolonych występują w postaci par
sprzężonych.
6.
Kąty nachylenia asymptot linii (gdy s → ∞) równają się ± 1900/(N-M), gdzie N jest
liczbą biegunów Go(s), a M jest liczbą zer Go(s). W przykładzie 1 N-M =2, więc
asymptoty tworzyły z osią rzeczywistą kąty ± 900. W przykładzie 2 N-M=1, więc kąty
nachylenia asymptot równały się ± 1900. W przykładzie 3 N-M=3, stąd kąty wynoszą
odpowiednio ± 600.
7.
Punkt początkowy asymptot, gdy n-m≥2, znajduje się
na osi rzeczywistej w punkcie o współrzędnej:
1.
Jeśli n-m≥2, to środek ciężkości biegunów układu zamkniętego
2.
, obliczany ze wzoru:
•
jest niezależny od K, czyli pozostaje nieruchomy na płaszczyźnie s przy zmianie K.
m
n
z
p
h
n
i
m
i
j
i
1
1
n
i
i
n
P
S
1
Konstrukcja linii pierwiastkowych
9 Udział w sumarycznej fazie transmitancji Go(s), wynikający z biegunów i
zer układu otwartego na prawo od punktu rozwidlenia i odejścia krzywej
pierwiastkowej od osi rzeczywistej, jest zrównoważony przez sumaryczną
fazę biegunów i zer po stronie lewej. Jeśli wszystkie bieguny i zera układu
otwartego są rzeczywiste, współrzędna punktu rozwidlenia może zostać
ustalona poprzez rozwiązanie następującego równania na b metodą prób:
•
10 Kąty θi odejścia linii od bieguna zespolonego układu otwartego pi są
podane wzorem:
• przy czym ψj jest kątem na który składają się kąty od innych biegunów
(mierzone dodatnio) i zer (mierzone ujemnie) układu otwartego. Podobnie
można obliczyć kąt osiągnięcia zespolonego zera układu otwartego.
• Wymienione reguły są bardzo proste do zapamiętania i umożliwiają
szybkie określenie przybliżonego przebiegu linii pierwiastkowych. Bardziej
szczegółowe wskazówki dotyczące wykreślenia linii pierwiastkowych oraz
inne metody ich konstrukcji można znaleźć w wielu opracowaniach.
m
j
j
n
i
i
z
b
p
b
1
1
.
1
1
j
i
,
180
j
o
i

Metoda przesuwania biegunów w
przestrzeni stanów dla układów SISO
•
Metoda przestrzeni stanów zapewnia bezpośrednie podejście do projektowania i analizy
wielowymiarowych układów sterowania. Projektowanie jest łatwe, jeżeli istnieją macierze
odwrotne względem macierzy B i C występujących w równaniach:
•
y = Cx,
•
opisujących liniowy obiekt sterowany o parametrach skupionych. Aby nieco uprościć ten
problem, przyjmujeliśmy, że nie ma bezpośredniego przejścia od u do y (tj. D = 0). Jeżeli
istnieją macierze B-1 i C-1, to B i C muszą być macierzami kwadratowymi o wymiarach n×n.
W następstwie tego wektor sterowań u i wektor wyjść y mają ten sam wymiar n co wektor
stanu x. Gdy pożądane zachowanie się obiektu jest określone przez [n×n] – wymiarową
macierz Ad, to można jednoznacznie wyznaczyć wektorowe prawo sterowania K ze
sprzężeniem zwrotnym w postaci
• u = - Ky
•
takie, że równania obiektu będą zapewniać pożądane właściwości dynamiczne obiektu w
układzie zamkniętym:
•
•
Aby znaleźć K, podstawimy najpierw drugie z równań obiektu do pierwszego równania, co
pozwala wyrazić wektor sterowania jako funkcję stanu:
•
u = - KCx
•
Jeżeli powyższe równanie (19.14) podstawimy teraz do równania stanu i wynik przyrównamy do
równania układu zamkniętego, to otrzymamy:
•
Ax – BKCx = Adx,
•
skąd wynika zależność:
•
A – BKC = Ad,
•
Czyli K = B-1(A – Ad) C-1
•
)
(
)
(
t
t
dt
t
d
Bu
Ax
x
x
A
x
d
dt
d
Zarys metody przesuwania
biegunów
• Istnieje możliwość, przez wprowadzenie odpowiedniej skalarnej zmiennej
sterującej u(t), zaprojektowania wielowymiarowego układu sterowania ze
sprzężeniem zwrotnym, w którym wszystkie bieguny układu zamkniętego będą
ustalone w wybranych dowolnych punktach na płaszczyźnie zespolonej s.
Potrzebne do tego warunki konieczne są następujące: (1) musi być możliwy
bezpośredni i całkowity pomiar stanu (tj. musi istnieć macierz C-1) i (2) obiekt
musi być sterowalny. Równanie stanu obiektu w tym przypadku ma postać:
•
• przy czym x jest wektorem stanu n-wymiarowym, A jest stałą macierzą o
wymiarach (n×n), a b jest wektorem n-wymiarowym. Ponieważ C-1 istnieje z
założenia, więc uprościmy dalsze rozważania przyjmując, że C = I, czyli: y = x;
co oznacza, że jest możliwy bezpośredni pomiar lub estymacja wektora stanu.
Prawo sterowania dla tego przypadku może być reprezentowane przez wektor
wierszowy kT, prowadząc do skalarnego sterowania:
• u(t) = - kTx(t)
)
(
)
(
t
t
dt
t
d
Bu
Ax
x
5
4
2
3
0
1
2
1
x
x
x
s
s
0
0
2
1
k
k

związek między biegunami układu
otwartego i zamkniętego
•
Wektor uchybu E(s) jest równy – X(s). Gdy wartość zadana jest zerowa, na wektor ten działa
stały wektor wierszowy kT, który zapewnia sterowanie skalarne U(s). Wektor wierszowy jest
zbiorem sterowań proporcjonalnych:
•
kT = [k1,k2, ..., kn]
•
Skalarne wejście sterujące jest zatem dane jako:
•
U(s) = = kTX (s)
lub
u(t) = - kTx(t)
•
Podstawiając liniowe prawo sterowania do równania obiektu, otrzymamy równanie układu
zamkniętego :
•
=(A-bkT)x(t).
•
Tym samym wielomian charakterystyczny układu zamkniętego przyjmuje postać:
•
ΔZ = det(sI – A+ bkT) = det{sI – A) [I + (sI – A)-1 bkT]} =
•
= det [sI – A) det [I + (sI – A)-1 bkT] =
•
= Δ (s) det {I + h(s)kT},
•
przy czym Δ(s) jest wielomianem charakterystycznym układu otwartego:
•
Δ(s) = |sI-A| = a0 + a1 s + ... + an-1 sn-1 + an sn , an = 1,
•
natomiast wektor h(s) ma postać:
•
h(s) = (sI – A)-1 b
•
i jest wektorem n-wymiarowym. Z rachunku macierzowego wiemy, że drugi wyznacznik ze
wzoru redukuje się do:
•
det (I + h(s) kT) = 1 + kTh (s)
•
Ostatecznie wielomian charakterystyczny układu zamkniętego przyjmuje postać:
•
Δz(s) = Δ(s) (1 + kTh(s) = Δ(s) + Δ(s) kT h(s).

•
Widzimy, że równanie Δz(s) = Δ(s) (1 + kTh(s) = Δ(s) + Δ(s) kT h(s) wiąże ze
sobą równania charakterystyczne układu zamkniętego i otwartego. Drugi
wyraz po prawej stronie równania można teraz wyrazić w sposób jawny jako
wielomian zmiennej s,
•
Δ(s) kT h(s) = Δ(s) kT (sI – A)-1 b = Δ(s) kT δi b = kT δi b,
•
Stąd:
•
Δc(s) = Δ(s) + kTδi b.
•
Wielomian charakterystyczny układu otwartego był wyrażony w zależności od
współczynników a0, a1, ..., an. Wracając doń, mamy teraz:
•
•
Δ(s) = a0 + a1 s + … + an sn ; an = 1.
•
Niech wielomian charakterystyczny układu zamkniętego będzie następujący:
•
Δc(s) = a0c + a1c s + … + anc sn ; anc = 1
•
Wówczas współczynniki dwu wielomianów charakterystycznych są powiązane
jak następuje:
•
ajc = aj + kTδj+1b ;
j = 0, ..., n

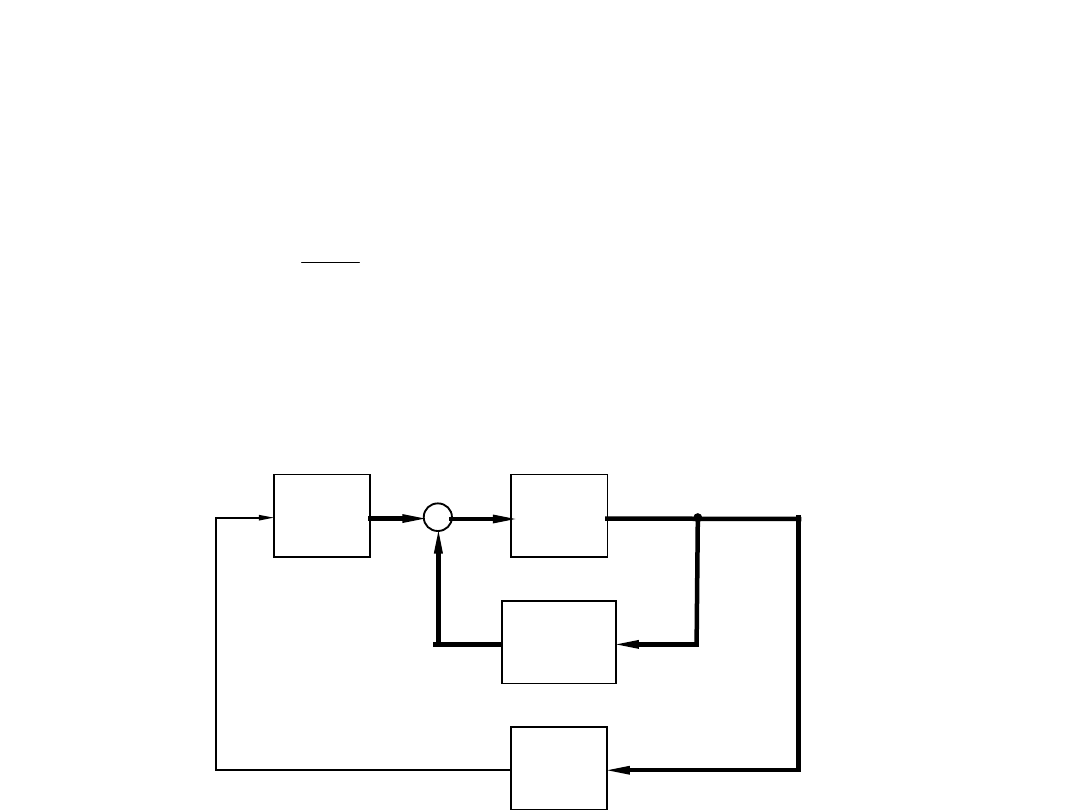
Przykład
•
Rozważmy układ pokazany na rys.. Obiekt sterowany jest opisany przez równanie:
•
Znaleźć wektor sterowania, czyli wektor [k1,k2] (patrz Rys.) metodą przesuwania biegunów.
•
Liniowe prawo sterowania ma postać:
•
Wielomian charakterystyczny układu otwartego jest równy:
•
Δ (s) = |(sI – A)| = 7 + 8s + s2
•
i stąd:
•
a0 = 7 , a1 = 8 , a2 = 1.
•
Wzór daje:
•
δ1 = a1I + a2 A =, δ2 = a2 I = I,
•
skąd:
•
a0c = a0 + kTδ1 b = 7 + 5k1 + 4k2,
•
a1c = a1 + kTδ2 b = 8 + k1,
•
a2c = a2 = 1
•
i wobec tego wielomian charakterystyczny układu zamkniętego przyjmuje postać:
•
Δc(s) = (7 + 5k1 + 4k2) + (8 + k1)s + s2.
•
Jeżeli np. chcemy, aby układ zamknięty miał dwa ujemne bieguny rzeczywiste, obydwa
równe –10, to musimy wtedy mieć:
•
Δc(s) = (s + 10)2 = 100 + 20s + s2.
•
Możemy wyznaczyć k1 i k2 dla spełnienia tego warunku przez rozwiązanie dwu równań:
•
8 + k1 = 20,
7 + 5k1 + 4k2 = 100
•
zatem:
•
k1 = 12, k2 =33/4 .
.
0
1
5
4
2
3
2
1
2
1
u
x
x
x
x
dt
d
3
4
2
5

Zapis macierzowy metody
przesuwania biegunów
•
Obecnie pokażemy, że jednoznaczne rozwiązanie na prawo sterowania kT istnieje i że
daje ono pożądany zbiór biegunów układu zamkniętego, gdy obiekt jest sterowalny. Jako
pierwszy krok rozwiązania problemu wyprowadzamy równanie macierzowe z równania
(19.29). Przepisując równanie (19.29) dla kolejnych j w następującej postaci:
•
a0c – a0 = kTδ1b = (δ1b)Tk,
»
………………….
•
a(n-1)c – an-1 = (δnb)Tk,
•
łączymy ten układ równań w jedno równanie macierzowe:
•
a macierz z prawej strony powyższego równania oznaczymy:
•
Równanie można rozwiązać względem k, jeżeli jest znana macierz D-1. Aby znaleźć
D-1, wprowadzamy stały wektor n-wymiarowy p, takie że:
•
PTb = 0, pTAb = 0, ..., pTAn-2b = 0, pTAn-1b = 1.
•
Wówczas wynika stąd, że:
•
PT[b Ab ... An-1b] = pTP = [0 0 ... 0 1],
•
a po transpozycji: PTp = en,
•
•
przy czym en jest n-tą kolumną macierzy I, a macierz P jest zdefiniowana jako:
•
P = [b Ab ... An-1b].
•
Jest to macierz decydująca o sterowalności, jak to wykazano wcześniej. Jeżeli obiekt jest
sterowalny, to |P| = 0 i możemy wyznaczyć wektor p z równania
•
P = (P-1)Ten.
,
1
1
0
0
1
n
c
n
c
n
a
a
a
a
k
b
S
b
S
b
S
b
S
D
n
1

•
Obliczamy teraz iloczyn macierzy:
•
[p ATp ... (AT)n-1 p] b = [p ATp ... (AT)n-1p] Db =
•
= p (δ1 b)Tb + ATp(δ2 b)Tb + ... + (AT)n-1 p (δn b)Tb =
•
= [δ1 bpT + δ2 bpTA + ... + δn bpT(A)n-1]Tb =
•
= Ib
•
Redukcja ta opiera się na równości iloczynów wektora kolumnowego i wektora wierszowego:
•
p (δi b)T = [(δi b)T], na podstawie własności wektora p: pTAib = 0- dla wszystkich i z
wyjątkiem i = (n-1) oraz na fakcie, że: δnb(pTAn-1 = δnb = Ib
•
Ponieważ Sn = I., to z równania (19.39) otrzymujemy:
•
[pATp ... (AT)n-1p] D = I,
•
przeto:
•
D-1 = [p ATp ... (AT)n-1p]
•
i równanie ma następujące rozwiązanie:
•
k = [p ATp ... (AT)n-1p]
•
•
= (a0c – a0) + (a1c – a1) ATp +(a(n-1)c – an-1)(AT)n-1 p =
•
= (aic – ai)(A)i p.
•
Prawo sterowania ze sprzężeniem zwrotnym od zmiennej stanu (wektor wierszowy) kT
można obliczyć za pomocą wzoru (19.34) (zazwyczaj posługując się komputerem) dla
sterowania skalarnego danego obiektu, gdy wszystkie bieguny układu zamkniętego są dane
z góry.
1
)
1
(
1
0
n
c
n
k
k
a
a
a
a
a
a

Przykład
•
Rozważymy ponownie układ, który projektowaliśmy w ostatnim
• przykładzie, czyli obiekt opisany macierzami: A = b =
• z prawem sterowania: . Ponownie wyznaczymy parametry
regulatora; tym razem metodą macierzową.
• Rozwiązanie
• Jeśli pożądane bieguny układu zamkniętego są biegunem podwójnym
równym –10, mamy:
• ∆c(s) = (s + 10)2 = a0c + a1c s + s2, przy czym: a0c = 100, a1c = 20.
Obliczamy:
•
P =[ b Ab] =
P-1 =
(P-1)T =
•
•
p = (P-1)T en =
•
•
k = (a0c - a0)p + (a1c – a1) AT p = (100-7)p + (20-8) p
= .
• Wyniki są takie same, jak w poprzednim przykładzie, ale rozwiązanie jest
teraz w zwartej postaci, nadającej się bezpośrednio do obliczeń na
komputerze cyfrowym.
,
5
4
2
3
0
1
2
1
k
k
k
;
4
/
1
4
/
3
4
/
3
1
;
4
0
3
1
.
4
/
1
4
/
3
0
1
5
2
4
3
4
/
33
12
,
4
/
1
1
0
1
4
/
1
4
/
3
0
1
Zastosowanie postaci kanonicznej
sterowalnej
• W poprzednim punkcie można zauważyć ważną rolę jaką spełnia postać
kanoniczna sterowalna w projektowaniu regulatora metodą przesuwania biegunów.
Obecnie pokażemy jak można wykorzystać tą postać do skonstruowania prawa
sterowania. Jak wiemy z rozdziału 6 postać kanoniczną uzyskuje się przez obrót
układu współrzędnych stanu z wykorzystaniem odpowiedniej postaci macierzy
transformacji T. Zdefiniujmy macierz transformacji jako iloczyn dwóch macierzy:
• Gdzie H jest macierzą obserwowalności:
• Natomiast macierz W zbudowana jest ze współczynników wielomianu
charakterystycznego:
• Jak pamiętamy z rozdziału 6 wielomian charakterystyczny ma postać:
• Δ(s) = |sI-A| = a0 + a1 s + ... + an-1 sn-1 + an sn , an = 1,
• Wprowadzenie transformacji (obrotu) prowadzi do nowego wektora stanu i
równania stanu układu otwartego:
• gdzie:
HW
T
B
A
B
A
AB
B
H
1
2
n
0
0
0
1
0
0
1
0
1
1
1
3
1
1
2
1
a
a
a
a
a
a
n
n
n
n
W
,
~
~
1
1
u
B
T
x
AT
T
x
• Wprowadzenie transformacji (obrotu) prowadzi do nowego wektora stanu i
równania stanu układu otwartego:
• gdzie:
• , .
• Przyjmiemy teraz, że pożądanymi wartościami własnymi układu zamkniętego
są bieguny: . Tym samym równanie charakterystyczne
układu zamkniętego przyjmie postać:
• Macierz wzmocnienia regulatora K również poddamy transformacji:
• a prawo sterowania będzie miało postać:
• Po wprowadzeniu powyższego prawa sterowania do równania stanu obiektu
otrzymujemy równanie stanu układu zamkniętego:
• Równanie charakterystyczne macierzy stanu układu zamkniętego przyjmie
więc postać:
,
~
~
1
1
u
B
T
x
AT
T
x
a
a
a
a
n
1
0
0
0
0
0
0
0
0
0
1
0
1
AT
T
1
0
0
0
1
B
T
n
p
p
p
,
,
,
2
1
0
)
(
)
)(
(
1
2
2
1
1
2
1
n
n
n
n
n
n
s
s
s
s
p
s
p
s
p
s
1
1
~
~
~
~
k
k
k
n
n
KT
K
x
KT
x
K
~
~
~
u
,
~
)
(
~
~
~
1
1
1
1
x
BKT
T
AT
T
x
BKT
T
x
AT
T
x
.
0
)
(
1
1
1
BK
A
I
T
BK
A
I
T
BKT
T
AT
T
I
s
s
s

•
Równanie charakterystyczne odpowiada więc następującemu równaniu stanu układu zamkniętego:
•
(19.53)
•
i prawu sterowania:
•
(19.54)
•
Widzimy więc , że powyższe prawo sterowania jest równoznaczne z prawem sterowania dla układu
opisanego w postaci fizycznej (z wykorzystaniem paw fizyki).
•
Obecnie rozwiniemy (uprościmy) równanie charakterystyczne wykorzystując zależności
(19.47), (19.52):
•
=
•
=
•
(19.55)
•
Otrzymaliśmy równanie charakterystyczne układu ze sprzężeniem od wektora stanu. Równanie te
musi być równoważne równaniu charakterystycznemu (19.48). Po porównaniu współczynników przy
tych samych potęgach s mamy:
•
(19.56)
•
Na bazie tych równań w prosty sposób wyznaczmy elementy macierzy wzmocnienia regulatora:
•
,
•
czyli:
•
K
(19.57)
•
Tym samym uzyskaliśmy stosunkowo prostą zależność na wyznaczanie macierzy wzmocnienia w
prawie sterowania (19.54). Aby wyznaczyć macierz wzmocnienia korzystamy ze współczynników
równania charakterystycznego obiektu (19.45), współczynników równania charakterystycznego
układu zamkniętego (19.48) oraz macierzy transformacji podanej wzorami (19.42), (19.43), (19.44).

Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
Wyszukiwarka
Podobne podstrony:
30 0 [dzień 21] Automat do gier, czy taca Czyli o własnym miejscu w Kościele
30 1 [dzień 21] Automat do gier, czy taca Czyli o własnym miejscu w Kościele
21 PSSO Automatyzacja kont
W 21 Alkohole
FESTO Podstawy automatyzacji
Automatyka (wyk 3i4) Przel zawory reg
Automatyzacja w KiC (w 2) Obiekty reg
21 02 2014 Wykład 1 Sala
AutomatykaII 18
Automatyka wykład 8
21 Fundamnety przyklady z praktyki
BO I WYKLAD 01 3 2011 02 21
Wybrane elementy automatyki instalacyjnej
12 Podstawy automatyki Układy sterowania logicznego
w 1 komunikacja 21 11 09 nst
więcej podobnych podstron