Zasady tworzenia modelu
matematycznego dynamiki w
oparciu o model fizyczny:
wyodrębnienie układu z otoczenia,
założenia upraszczające
Prezentację przygotował:
Tomasz Paciepnik
149473

Co to jest model
matematyczny?
Przez model matematyczny rozumiemy
opis wzorów i wyników ilościowych
opisujących, statyczne, dynamiczne,
niezawodnościowe, energetyczne,
strukturalne, funkcjonalne i logiczne
związki pomiędzy wielkościami
występującymi w opisywanym obiekcie
(urządzeniu, systemie, procesie)

W jaki sposób powstaje model
matematyczny?
Model
matematyczny
powstaje
na
podstawie znajomości praw fizycznych i
chemicznych
rządzących
układem.
Powinien on potem ulec weryfikacji
doświadczalnej (identyfikacja).

Fazy procesu modelowania
matematycznego
I Przyjęcie założeń upraszczających (hipotez roboczych)
II Ułożenie modelu matematycznego w postaci ukł. równań,
schematów bloko-
wych, grafów, itp.
III Realizacja modelu matematycznego
IV Weryfikacja opracowanego modelu
V Wykorzystanie modelu do celów związanych z procesami
projektowania
Założenia upraszczające – pomijanie
małych wpływów
Pomijanie małych wpływów upraszcza analizę zmiennych i stopień
skomplikowania równań ruchu. Komplikacja analizy rośnie wraz z
większą liczbą części „ruchomych” układu.
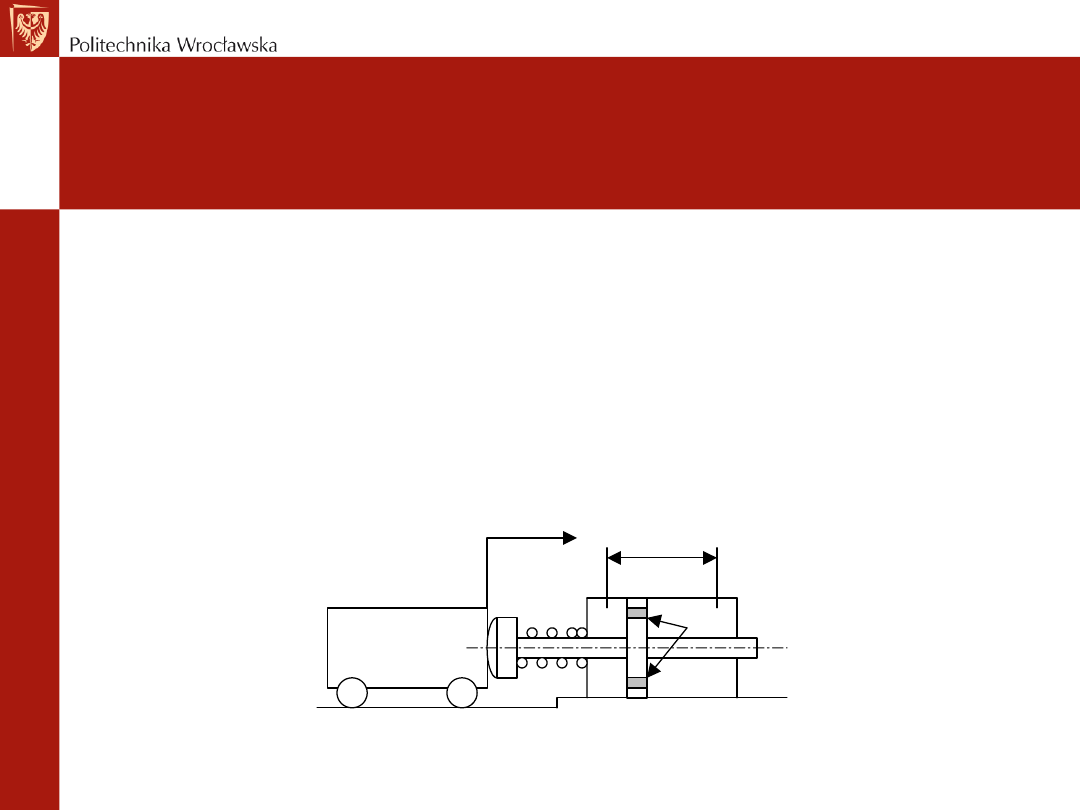
PRZYKŁAD : Zderzak
hydrauliczny:
mẍ + kx + S
0
= A∆p
S
0
- pomijalnie mały wpływ napięcia wstępnego sprężyny
x
p
k ,S
0
A G
m
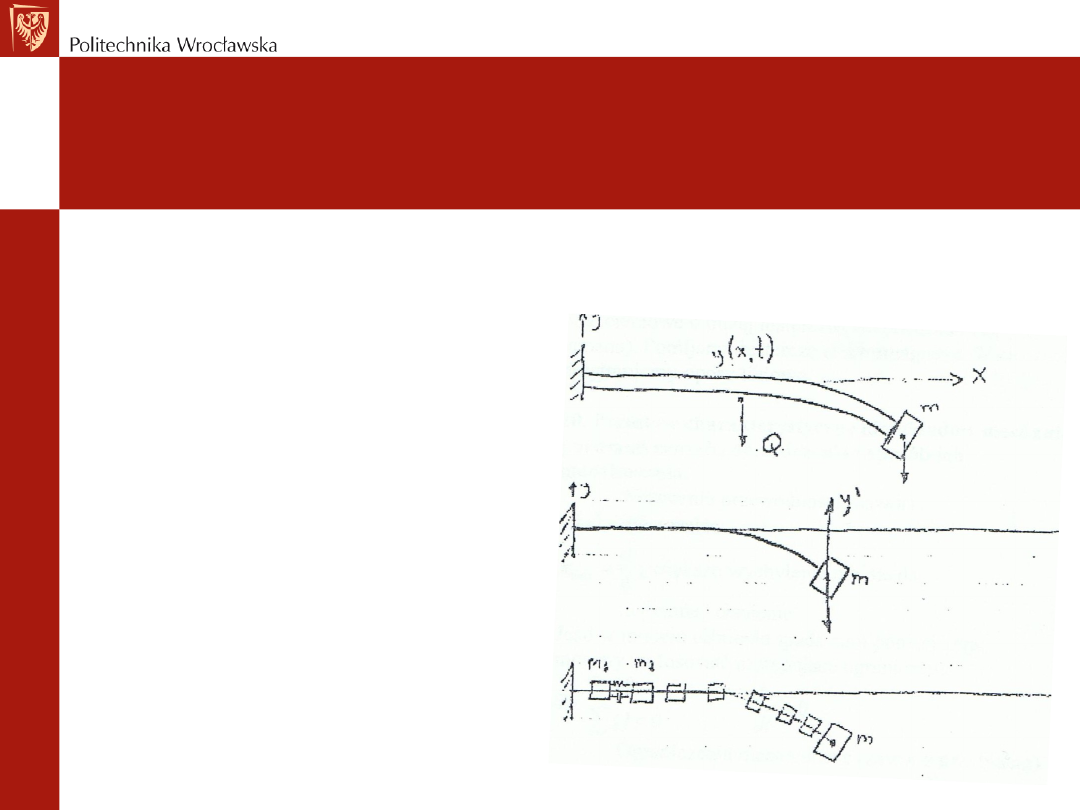
Założenia upraszczające – zastępowanie
parametrów rozłożonych skupionymi
Zamiast równań różniczkowych o pochodnych cząstkowych
można opisać układ równaniami różniczkowymi
zwyczajnymi.
Przykład:
Masa ciągła na belce jest
zamieniana na kilka mas
skupionych (równych sobie i w
jednakowych odstępach). W
zderzeniu
wagonów
przyjmujemy masę skupioną
żeby nie brać pod uwagę
żadnych
momentów
siły
(skupiona masa w centralnym
punkcie
wagonu).
Masa
rozłożona
powoduje
duże
trudności
przy
obliczaniu
momentów bezwładności).
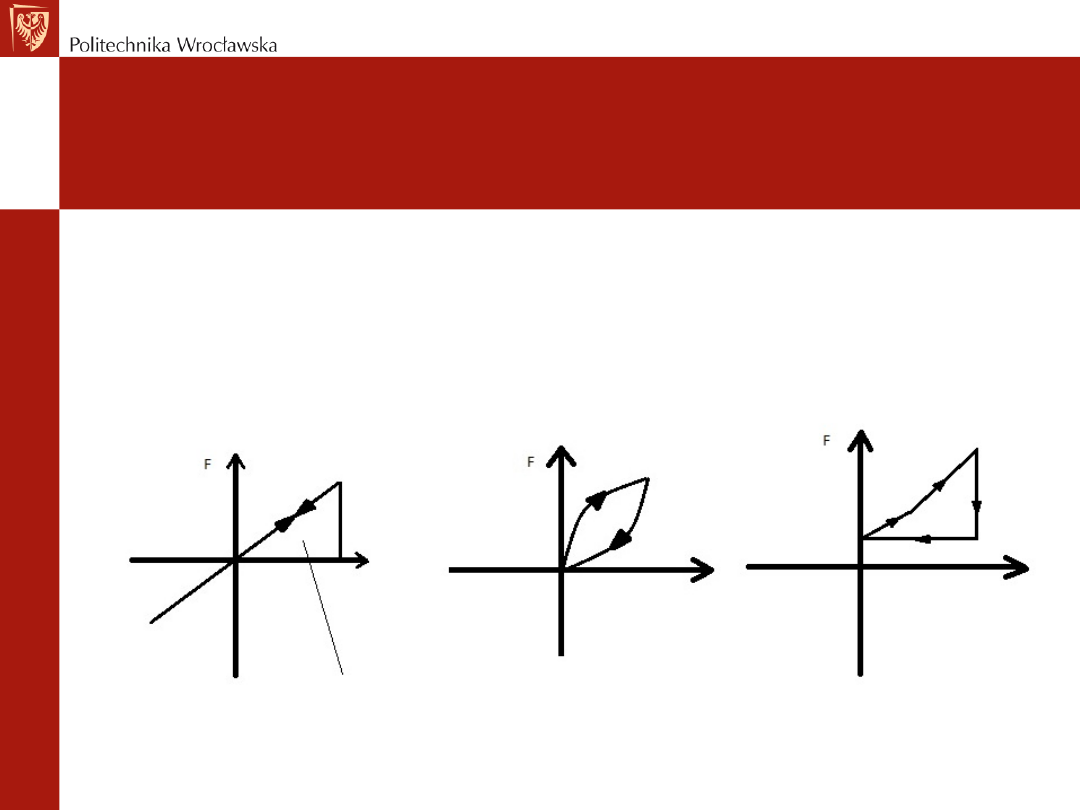
Założenia upraszczające – zakładanie
prostych zależności liniowych
Liniowość – superpozycja. Zakładanie
liniowych zależności w prostych
przypadkach umożliwia uzyskanie
rozwiązania o charakterze ogólnym.
Histereza
sprężyny
Pole pracy
sprężyny
Charakterystyka
sprężyny
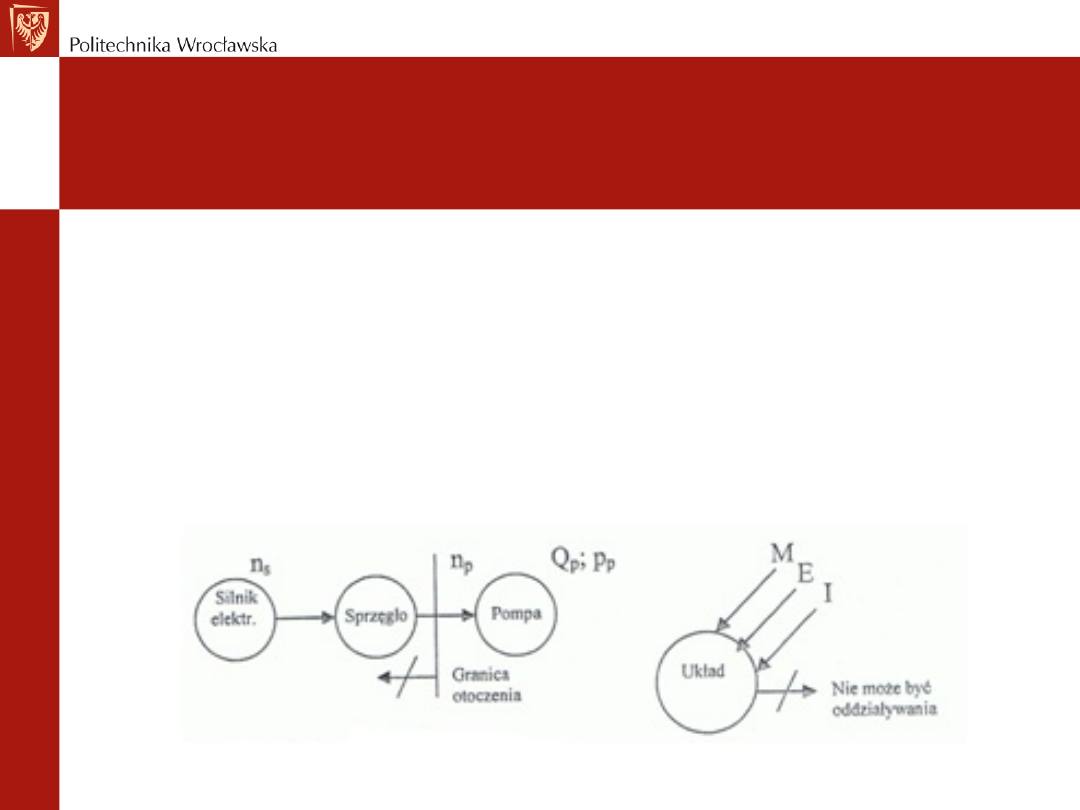
Założenia upraszczające – niezależność
otoczenia badanego układu
Środowisko otaczające układ nie ulega wpływom pochodzącym
z układu.
Przykład:
Pomijamy sprawność sprzęgła, dynamikę silnika oraz
przyjmujemy stałą prędkość silnika. Daje to granicę pomiędzy
sprzęgłem, a pompą, która jest granicą z otoczeniem.
Zależności przechodzą w jedną stronę.
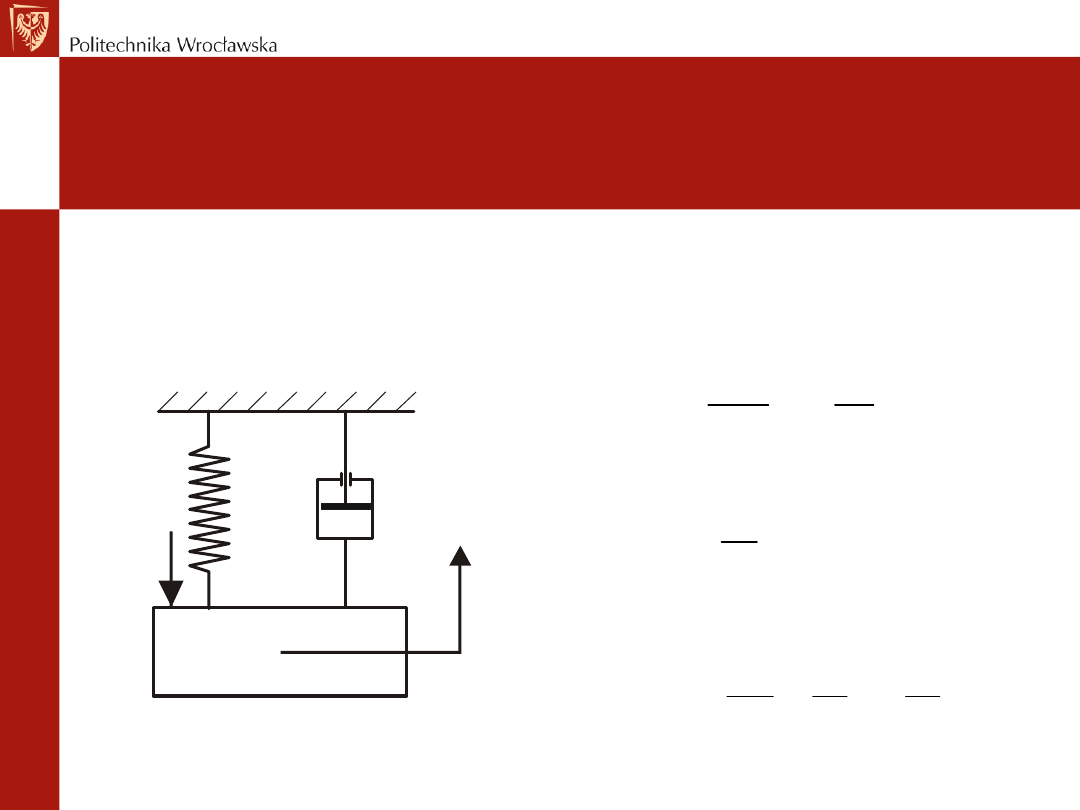
Przykład – oscylator harmoniczny
m
k
f
x
F
Model
fizyczny:
Model
matematyczny:
F
kx
dt
dx
f
dt
x
d
m
2
2
*
)
*
(
1
..
0
..
kx
x
f
F
m
x
x
m
k
x
m
f
m
F
x
*
.
0
..

Przykład – zawieszenia samochodu
M
m
z
y
x
K
k
f
mg
k
y
z
K
y
z
f
y
m
Mg
y
z
K
y
z
f
z
M
x)
F(y
)
(
)
(
)
(
)
(
Model
fizyczny:
Równania
ruchu:
g
m
k
y
z
m
K
y
z
m
f
y
g
y
z
M
K
y
z
M
f
z
x)
(y
F
)
(
)
(
)
(
)
(
Model
matematyczny:

Dziękuję za
uwagę
Document Outline
Wyszukiwarka
Podobne podstrony:
Identyfikacja modelu matematycznego elementu
20 ewidencja ludnosciid 21349 ppt
5 Istota Modelu obiektowego PPT
Dodawanie i odejmowanie do 20- Kubuś Puchatek, Matematyka(1)
sprawdzian matematyka dodawanie i odejmowanie w zakr 20, edukacja wczesnoszkolna, e,matematyczna
20, studia, studia, matematyka, całki i szeregi
,informatyka w zastosowaniach inżynierskich,Tworzenie modelu logicznego i fizycznego danych
14(45) Proces Tworzenia oprogramowaniaid 15602 ppt
20 lekarz biegłyid 21385 ppt
2009 05 20 POZ 09id 26813 ppt
Porównanie modelu matematycznego z eksperymentem
03 Proces tworzenia oprogramowaniaid 4616 ppt
Wyjaśnić zasadę tworzenia modelu małosygnałowego elementów półprzewodnikowych
2 Tworzenie tabelid 20864 ppt
20 Fizyka jądrowaid 21351 ppt
13Strategie konstruowania kwestionariuszy osobowości i etapy tworzenia testuid 15135 ppt
Identyfikacja modelu matematycznego elementu
więcej podobnych podstron