Politechnika Świętokrzyska
Wydział Mechatroniki i Budowy Maszyn
Centrum Laserowych Technologii Metali PŚk i PAN
Zakład Informatyki i Robotyki
Przedmiot: Podstawy Automatyzacji – laboratorium, rok III, sem. II
Ćwiczenie nr 3
Badanie stabilności układów automatyki – symulacja komputerowa
1. Stabilność - wprowadzenie
Jedną z podstawowych własności jaką muszą wykazywać układy automatyki to
stabilność. Układ regulacji uważa się za stabilny, gdy wielkość wyjściowa, jako odpowiedz na
dowolne ograniczone wymuszenie, będzie ograniczona. Sytuacja taka będzie miała miejsce,
gdy w układzie będzie tłumiony stan nieustalony.
Wyróżniamy następujące układy pod względem stabilności:
1.
Stabilny asymptotycznie – wszystkie rzeczywiste pierwiastki równania
charakterystycznego lub wszystkie części rzeczywiste pierwiastków zespolonych
muszą być ujemne. W interpretacji graficznej oznacza to, że wszystkie te bieguny
lub wartości własne macierzy stanu, leżą w lewej półpłaszczyźnie zmiennej
zespolonej.
2.
Stabilny nieasymptotycznie (na granicy stabilności) – układ, którego pierwiastki
leżą w lewej półpłaszczyźnie, oraz występują:
•
jeden pierwiastek rzeczywisty równy zero,
•
pojedyncze pary pierwiastków urojonych,
•
jeden pierwiastek rzeczywisty równy zero i pojedyncze pary pierwiastków
urojonych (leżą na osi urojonej).
3.
Układ niestabilny – występuje co najmniej jeden pierwiastek w prawej
półpłaszczyźnie zmiennej zespolonej.
Poprzez rozwiązanie równania charakterystycznego określa się stabilność układu.
Rozwiązanie to pozwala na określenie położenia pierwiastków, a więc dzięki temu można
zbadać odległość od granicy stabilności, którą jest oś urojona zmiennej zespolonej.
2. Algebraiczne kryterium stabilności (kryterium Hurwitza)
Rozwiązywanie równania charakterystycznego często jest kłopotliwe, dlatego
wprowadza się metody oszacowywania stabilności układu.
Warunkiem koniecznym i dostatecznym stabilności układu liniowego i stacjonarnego
(1) jest, ażeby wszystkie współczynniki wielomianu charakterystycznego transmitancji tego
układu istniały i były dodatnie, a ponadto wyznacznik
n
∆
(3),
)
(
)
(
)
(
)
(
)
(
)
(
1
1
1
1
1
1
t
u
b
dt
t
u
d
b
dt
t
u
d
b
t
x
a
dt
t
x
d
a
dt
t
x
d
a
o
m
m
m
m
m
m
o
n
n
n
n
n
n
+
+
+
=
+
+
+
−
−
−
−
−
−
L
L
(1)
zwany wyznacznikiem Hurwitza oraz jego podwyznaczniki
1
3
2
,
,
,
−
∆
∆
∆
n
L
były dodatnie.
Po pewnych przekształceniach otrzymujemy formułę równania charakterystycznego, z
którego tworzymy wyznacznik i podwyznaczniki:
0
...
0
1
1
1
=
+
+
+
+
−
−
a
s
a
s
a
s
a
n
n
n
n
.
(2)
0
2
4
1
3
0
2
3
1
4
2
5
3
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
n
n
n
n
n
n
n
n
n
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
−
−
−
−
−
−
−
=
∆
(3)
1
1
−
=
∆
n
a
2
3
1
2
−
−
−
=
∆
n
n
n
n
a
a
a
a
3
1
4
2
5
3
1
3
0
−
−
−
−
−
−
−
=
∆
n
n
n
n
n
n
n
n
a
a
a
a
a
a
a
a
M
1
3
5
0
2
4
1
3
3
1
4
2
5
3
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
n
n
n
n
n
n
n
n
n
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
−
−
−
−
−
−
−
−
=
∆
Przykład 1
Zbadać, czy wielomian
4
3
5
2
2
3
4
+
+
+
+
s
s
s
s
(4)
spełnia założenia kryterium Stabilności Hurwitza.
Wszystkie współczynniki wielomianu charakterystycznego są dodatnie, co spełnia
pierwszy warunek kryterium. Wielomian (4) jest czwartego stopnia, wiec należy sprawdzić
wszystkie wyznaczniki kończąc na 3 stopniu, co daje:
0
7
5
3
1
2
2
>
=
=
∆
,
0
5
3
4
0
2
5
3
0
1
2
3
>
=
=
∆
.
Możemy wywnioskować, że wielomian (4) nie posiada pierwiastków o dodatniej
części rzeczywistej.
3. Częstotliwościowe kryterium stabilności
Kryterium częstotliwościowe zwane kryterium Nyquista pozwala badać stabilność
układu zamkniętego na podstawie przebiegu charakterystyki częstotliwościowej układu
otwartego.
1.
Jeżeli układ otwarty jest stabiny asymptotycznie, to układ zamkniety jest
stabilny asymptotycznie wtedy i tylko wtedy, gdy wykres charakterystyki
amplitudowo-fazowej G
0
(jω) układu otwartego przy zmianie pulsacji ω od 0 do
+∞ nie obejmuje punktu (-1, j0).
2.
Jeżeli układ otwarty jest niestabilny i jego transmitancja ma m biegunów
w prawej półpłaszczyźnie zmiennej zespolonej, to układ zamknięty jest stabilny
wtedy i tylko wtedy, gdy wykres charakterystyki amplitudowo-fazowej G
0
(jω)
układu otwartego przy zmianie pulsacji ω od 0 do +∞ obejmuje w kierunku
dodatnim punktu (-1, j0) m/2.
Prz ykł ad 2
Dany jest obiekt o transmitancji
1
2
2
)
(
2
3
+
+
+
=
s
s
s
k
s
G
p
o
(5)
za pomocą polecenia nyquist
z pakietu MatLab-a, wykonamy wykresy charakterystyk
amplitudowo-fazowych układu otwartego G
0
(jω) dla trzech wartości wzmocnienia k
p
=2, 3
i 4.
-3
-2
-1
0
1
2
3
4
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
W ykres Nyquista Go(jw)
P (w)
Q
(w
)
k p= 2
k p= 3
kp= 4
w
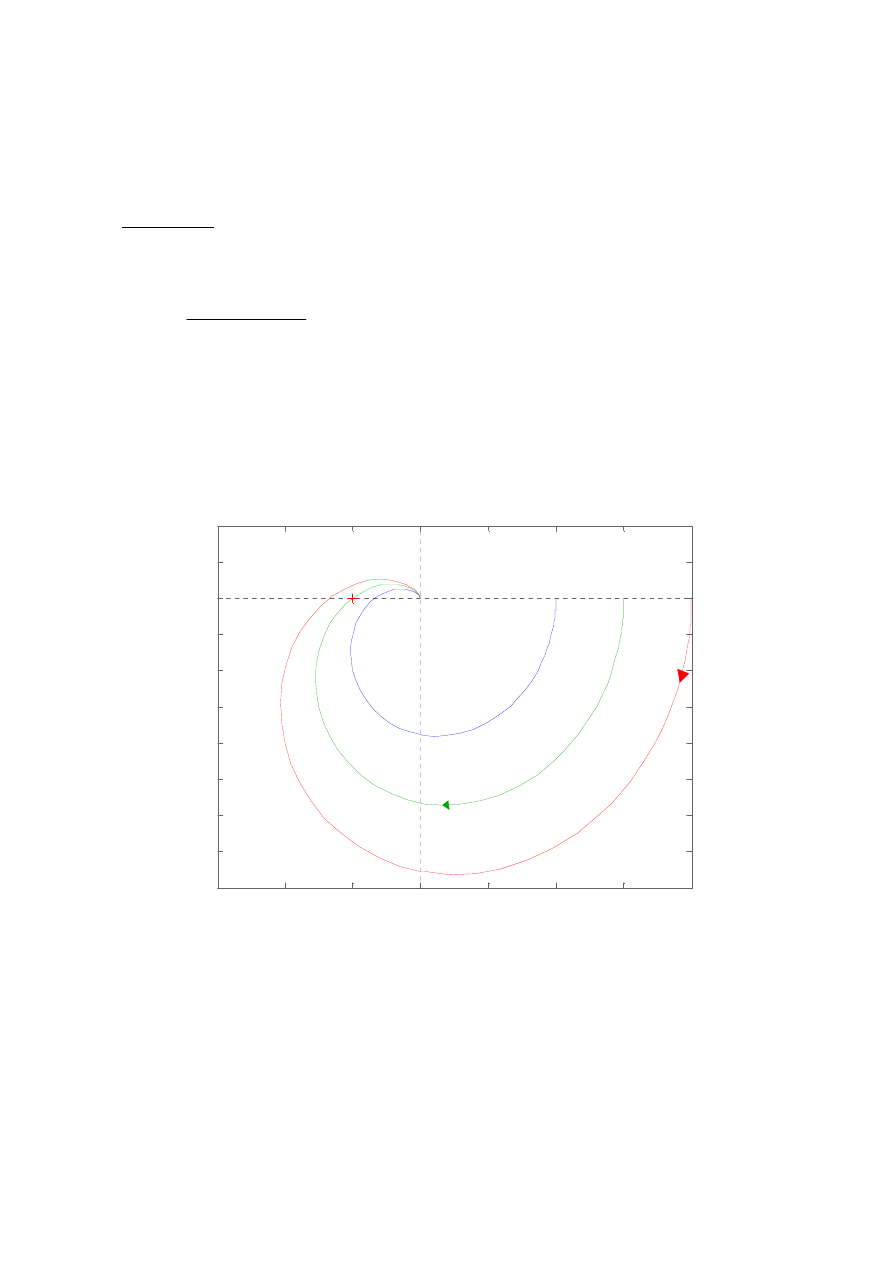
Rys. 1. Charakterystyki amplitudowo-fazowe układu otwartego G
0
(jω) dla k
p
= 2, 3, 4
Na wykresie charakterystyki Nyquista układu otwartego G
0
(jω) (rys. 2) możemy
zaobserwować trzy charakterystyczne przypadki regulacji. Pierwszy z nich przedstawia
sytuację, gdzie charakterystyka G
0
(jω) wykreślona dla wszystkich wartości częstotliwości ω
nie obejmuje punktu (-1,j0). Powiemy, że układ zamknięty dla k
p
jest stabilny. W drugim
przypadku dla k
p
= 3 charakterystyka G
0
(jω) przechodzi przez punkt (-1,j0), układ ten jest na
granicy stabilności. Dla k
p
= 4 charakterystyka G
0
(jω) przy wzroście ω od 0 do ∞ obejmuje
punkt (-1,j0), w tej sytuacji układ po zamknięciu sprzężenia zwrotnego będzie niestabilny.
Potwierdzenie wcześniejszego wywodu znajdziemy przez sprawdzenie położenia biegunów
transmitancji równania charakterystycznego układu zamkniętego na płaszczyźnie zmiennej
zespolonej.
Wyznaczamy transmitancję układu zamkniętego
,
(6)
oraz jego równanie charakterystyczne
. (7)
Za pomocą komendy roots programu MatLab zbadano pierwiastki (bieguny) równania
(7) dla:
•
k
p
= 2
s
1
= -1.8105
s
2
= -0.0947 + 1.2837j
s
3
= -0.0947 - 1.2837j
Wszystkie pierwiastki mają części rzeczywiste dodatnie, co dowodzi stabilności
układu zamkniętego.
•
k
p
= 3
s
1
= - 2.0000
s
2
= 0.0000 + 1.4142j
s
3
= 0.0000 - 1.4142j
W tym przypadku występują pierwiastki urojone sprzężone posiadające części
rzeczywiste równe 0 (bieguny s
2
i s
3
znajdują się na osi urojonej), zatem układ
zamknięty jest na granicy stabilności.
•
k
p
= 4
s
1
= -2.1509
s
2
= 0.0755 + 1.5228j
0
1
2
2
)
(
2
3
=
+
+
+
+
=
p
z
k
s
s
s
s
M
1
2
2
)
(
1
)
(
)
(
2
3
+
+
+
+
=
+
=
p
p
o
o
z
k
s
s
s
k
s
G
s
G
s
G
s
3
= 0.0755 - 1.5228j
Tym razem występują pierwiastki zespolone sprzężone, których części rzeczywiste są
dodatnie, wobec tego układ zamknięty jest dla tego przypadku niestabilny.
3. Przebieg ćwiczenia
a)
Zbadaj stabilność układów postępując zgodnie z przykładami 1 i 2. Wykreśl
charakterystyki:
•
czasowe (na jednym wykresie) dla przykładu 2,
•
rozmieszczenie biegunów i zer transmitancji na płaszczyźnie zmiennej zespolonej
posługując się poleceniem (pzmap)
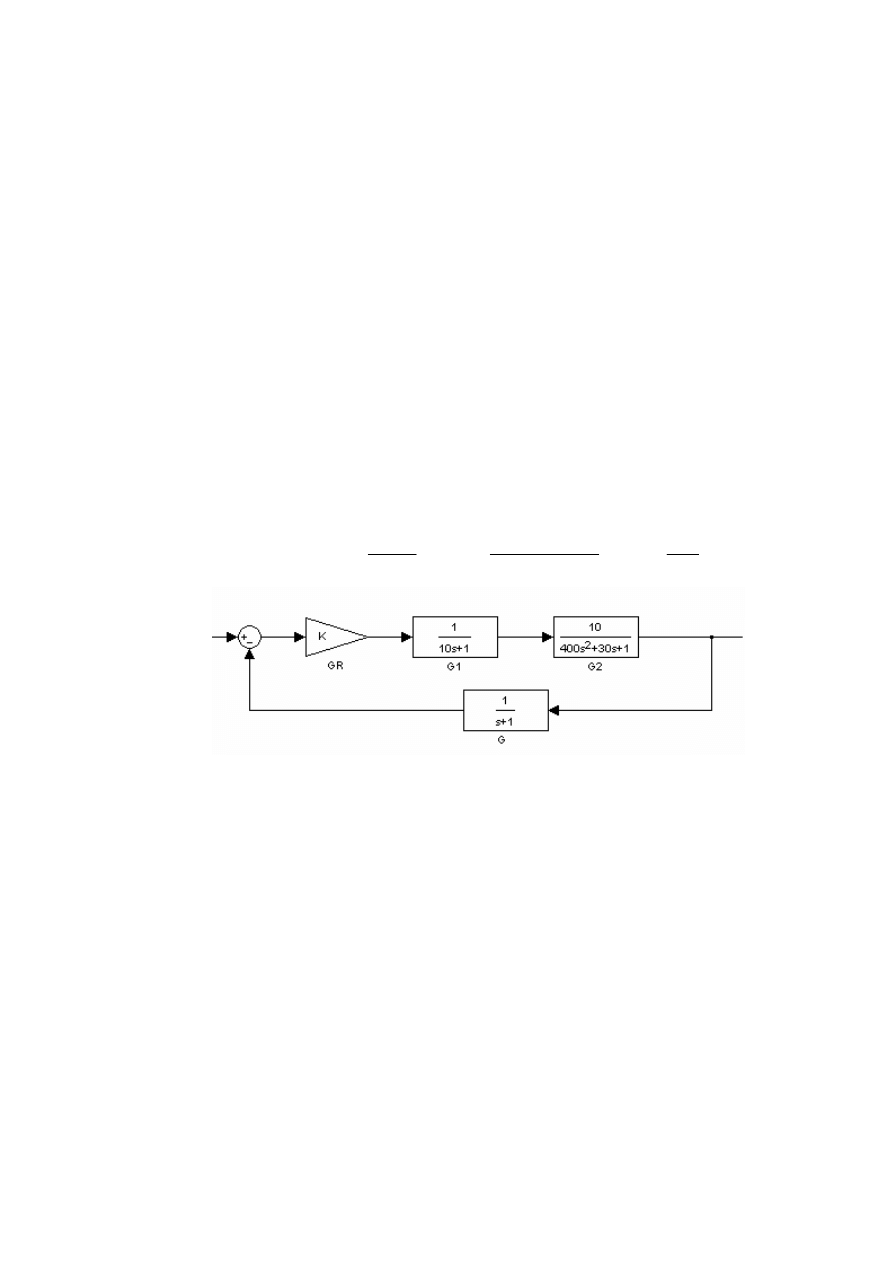
b)
Dla jakiego przedziału wartości parametru K układ jest stabilny. Transmitancje
elementów układu wynoszą:
K
s
G
r
=
)
(
,
1
10
1
)
(
1
+
=
s
s
G
,
1
30
400
10
)
(
2
2
+
+
=
s
s
s
G
,
1
1
)
(
+
=
s
s
G
.
c)
Proszę o wybranie 2 transmitancji (jedna układ stabilny, druga układ niestabilny)
i przedstawienie wyliczeń analitycznych i graficznych. Dla układu stabilnego proszę
o zaznaczenie zapasu stabilność zarówno dla charakterystyki Nyquista jak i Bodego.
Wyszukiwarka
Podobne podstrony:
Badanie stabilności układów na podstawie kryterium Nyquista Zapas?zy i wzmocnienia
Stabilność układów automatyki
Badanie stabilnosci ukladow dyn Nieznany (2)
Badanie stabilności układów na podstawie kryterium Nyquista Zapas?zy i wzmocnienia
07 Badanie elementów i układów automatyki
Stabilność układów automatyki
L5 Badanie stabilności liniowego układu 3 rzędu z opóźnieniem Wpływ wartości opóźnienia na stabilno
Ćwiczenie 3 Badania symulacyjne układów automatyki o złożonej konfiguracji
Badanie zapasu stabilności układów dyn
Wykład 6 Stabilność liniowych układów automatyki (2013)
symulacje komputerowe, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, AUTOMATY
Automatyka- Badanie układów automatyki z wykorzystaniem programu Mathlab
Modelowanie i badanie podstawowych elementów liniowych automatyki – symulacja
Wykład 6 Stabilność liniowych układów automatyki (2013)
SYMULACJA KOMPUTEROWA OBWODÓW ELEKTRYCZNYCH
więcej podobnych podstron