Materiały do wykładów
Fizyka (Informatyka - EEIiA 2011/12)
23 października 2011
c
Mariusz Krasiński 2011
Spis treści
1
1
2
2
Założenia modelu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
Rozwiązanie równania dla drgań tłumionych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
Dyskusja możliwych postaci rozwiązania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
Dekrement logarytmiczny tłumienia
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
7
Wymuszenie harmoniczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
Rozwiązanie równania (4.1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
Rezonans . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
Ruch wymuszony na wykresie fazowym . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
Dynamiczny tłumik drgań . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
UWAGA! Większość rysunków wymaga własnoręcznego dopisania oznaczeń!
Część III
DRGANIA cd.
1
Przypominacz (?) matematyczny
(x
n
)
0
=
d
dx
(x
n
) = n x
n−1
[sin(x)]
0
=
d
dx
[sin(x)] = cos(x)
[cos(x)]
0
=
d
dx
[cos(x)] = − sin(x)
(e
x
)
0
=
d
dx
(e
x
) = e
x
1

3
DRGANIA HARMONICZNE TŁUMIONE
d
dt
[sin(ωt + φ)] = cos(ωt + φ)
d
dt
(ωt + φ) = cos(ωt + φ) ω
d
dt
[cos(ωt + φ)] = − sin(ωt + φ)
d
dt
(ωt + φ) = − sin(ωt + φ) ω
d
dt
e
i(ωt+φ)
= e
i(ωt+φ)
d
dx
[i(ωt + φ)] = e
i(ωt+φ)
iω
2
Drgania a liczby zespolone
Ogólna postać liczby zespolonej
z = X + iY
gdzie
i =
p
(−1)
Trygonometryczna postać liczby zespolonej
z = R[cos(φ) + i sin(φ)]
Wykładnicza postać liczby zespolonej
z = Re
iφ
= R[cos(φ) + i sin(φ)]
Drganie harmoniczne można więc przedstawić w postaci:
x = Ae
i(ωt+φ)
Obliczmy, korzystając z zapisu przy pomocy liczb zespolonych, prędkość i przyspieszenie w ruchu
harmonicznym
v =
dx
dt
=
d
dt
Ae
i(ωt+φ)
= −Aωe
i(ωt+φ)
a =
d
2
x
dt
2
=
d
dt
dx
dt
=
d
dt
−Aωe
i(ωt+φ)
= −Aω
2
e
i(ωt+φ)
= −ω
2
x
Otrzymaliśmy więc identyczną jak na poprzednim wykładzie zależność pomiędzy przyspieszeniem i
wychyleniem ciała drgającego ruchem harmonicznym prostym
d
2
x
dt
2
= −ω
2
x
3
Drgania harmoniczne tłumione
3.1
Założenia modelu
Rozpatrzymy jedynie przypadek gdy siła oporu (tłumienia) jest proporcjonalna do prędkości.
~
F
op
= −β~
v
(3.1)
(!! Kiedy wolno tak napisać?)
c
Mariusz Krasiński 2011
2
3.2
Rozwiązanie równania dla drgań tłumionych
3
DRGANIA HARMONICZNE TŁUMIONE
Równanie ruchu drgającego z tłumieniem przyjmie wtedy postać
m
d
2
x
dt
2
= −kx − βv
czyli
d
2
x
dt
2
+
β
m
dx
dt
+
k
m
x = 0
(3.2)
albo po wprowadzeniu oznaczenia
k
m
= ω
o
2
(dlaczego tak? )
d
2
x
dt
2
+
β
m
dx
dt
+ ω
2
o
x = 0
(3.3)
3.2
Rozwiązanie równania dla drgań tłumionych
Postulujemy, że rozwiązanie równania (3.3) ma postać (czyli zakładamy, że będzie to drganie harmoniczne)
x = Be
iωt
(3.4)
Odpowiednie pochodne wyrażenia (3.4) wynoszą
dx
dt
= Biωe
iωt
= iωx
(3.5)
d
2
x
dt
2
=
d
dt
dx
dt
= (iω)
2
Be
iωt
= −ω
2
x
(3.6)
Podstawiając (3.5) i (3.6) do równania (3.3) otrzymujemy
−ω
2
x +
β
m
iωx + ω
o
2
x = 0
czyli
ω
2
−
iβ
m
ω − ω
o
2
= 0
(3.7)
Równanie (3.7) jest zwykłym równaniem kwadratowym, z którego można wyliczyć ω
“Delta” dla tego równania wynosi
∆ =
iβ
m
2
+ 4ω
2
o
= 4ω
2
o
−
β
m
2
a rozwiązania równania (3.7) mają postać
ω
1,2
=
β
m
i ±
r
4ω
2
o
−
β
m
2
2
=
β
2m
i ±
s
ω
2
o
−
β
2m
2
(3.8)
Ponieważ zapostulowaliśmy, że rozwiązanie równania (3.3) ma postać jak w równaniu (3.4) więc ogólna postać
rozwiązania równania (3.3) jest
x = Ae
iω
1
t
+ Be
iω
2
t
(3.9)
gdzie A, B są stałymi zaś ω
1
, ω
2
możemy wziąć z równania (3.8)
x = Ae
i
β
2m
i +
q
ω
2
o
−
(
β
2m
)
2
t
+ Be
i
β
2m
i −
q
ω
2
o
−
(
β
2m
)
2
t
(3.10)
c
Mariusz Krasiński 2011
3
3.3
Dyskusja możliwych postaci rozwiązania
3
DRGANIA HARMONICZNE TŁUMIONE
3.3
Dyskusja możliwych postaci rozwiązania
3.3.1
Przypadek 1 (małe tłumienie)
Kiedy spełniony jest warunek
ω
2
o
−
β
2m
2
> 0
rozwiązanie równania (3.3) ma postać
x = Ae
−
β
2m
t
cos
s
ω
2
o
−
β
2m
2
t
(3.11)
Uzasadnienie zależności (3.11)
Oznaczając
ω
0
=
s
ω
2
o
−
β
2m
2
> 0
i podstawiając do równania (3.10) otrzymujemy (przy założeniu A = B = C)
x = Ce
−
β
2m
t
e
iω
0
t
+ Ce
−
β
2m
t
e
−iω
0
t
= Ce
−
β
2m
t
[e
iω
0
t
± e
−iω
0
t
)] =
= Ce
−
β
2m
t
{[cos(ω
0
t) + i sin(ω
0
t)] + [cos(ω
0
t) − i sin(ω
0
t)]} =
= Ce
−
β
2m
t
[2 cos(ω
0
t)] = 2Ce
−
β
2m
t
cos(ω
0
t)
Ponieważ amplituda drgań zależy od warunków początkowych a nie od parametrów
układu więc możemy oznaczyć sobie
Amp = 2C
a wtedy rozwiązanie ma postać
x = Amp e
−
β
2m
t
cos
s
ω
2
o
−
β
2m
2
t
(3.12)
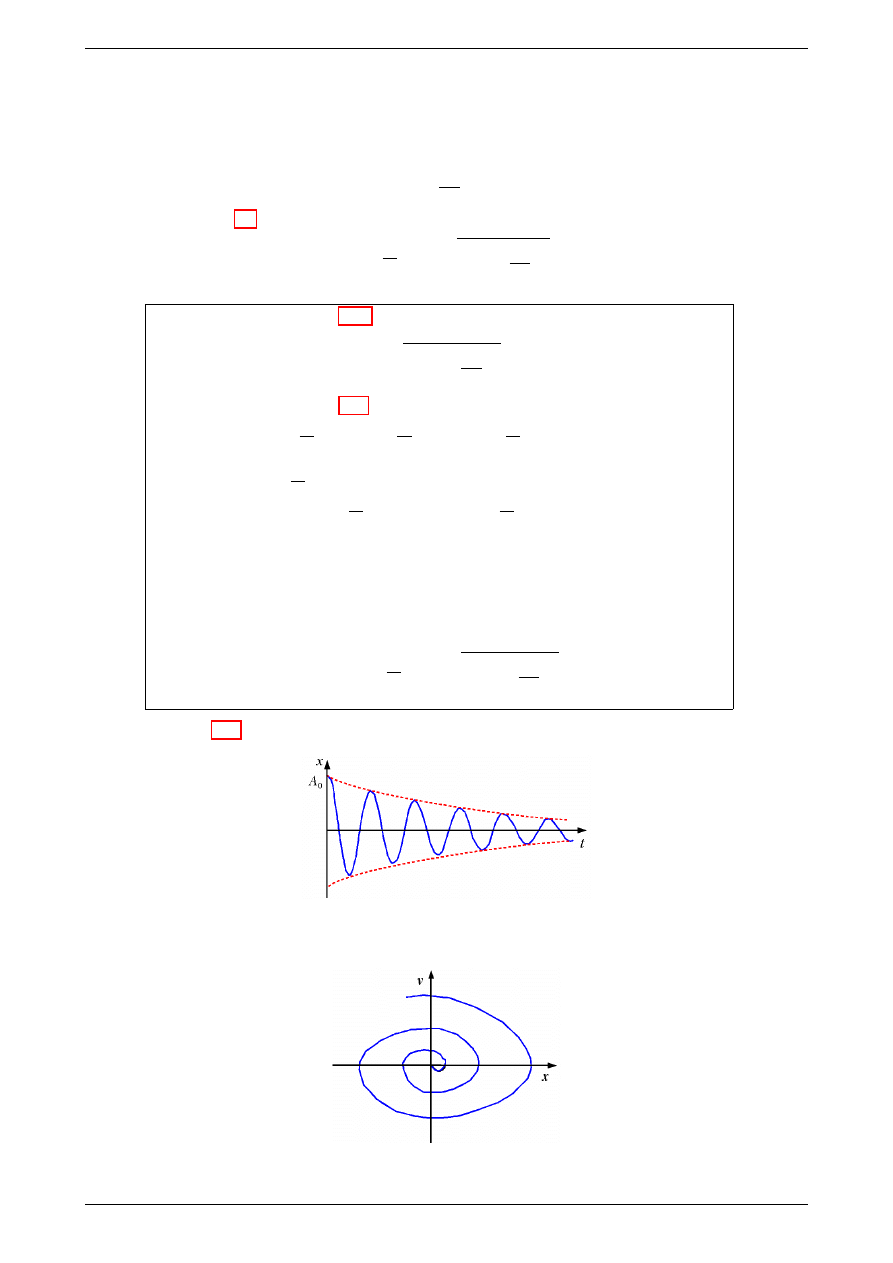
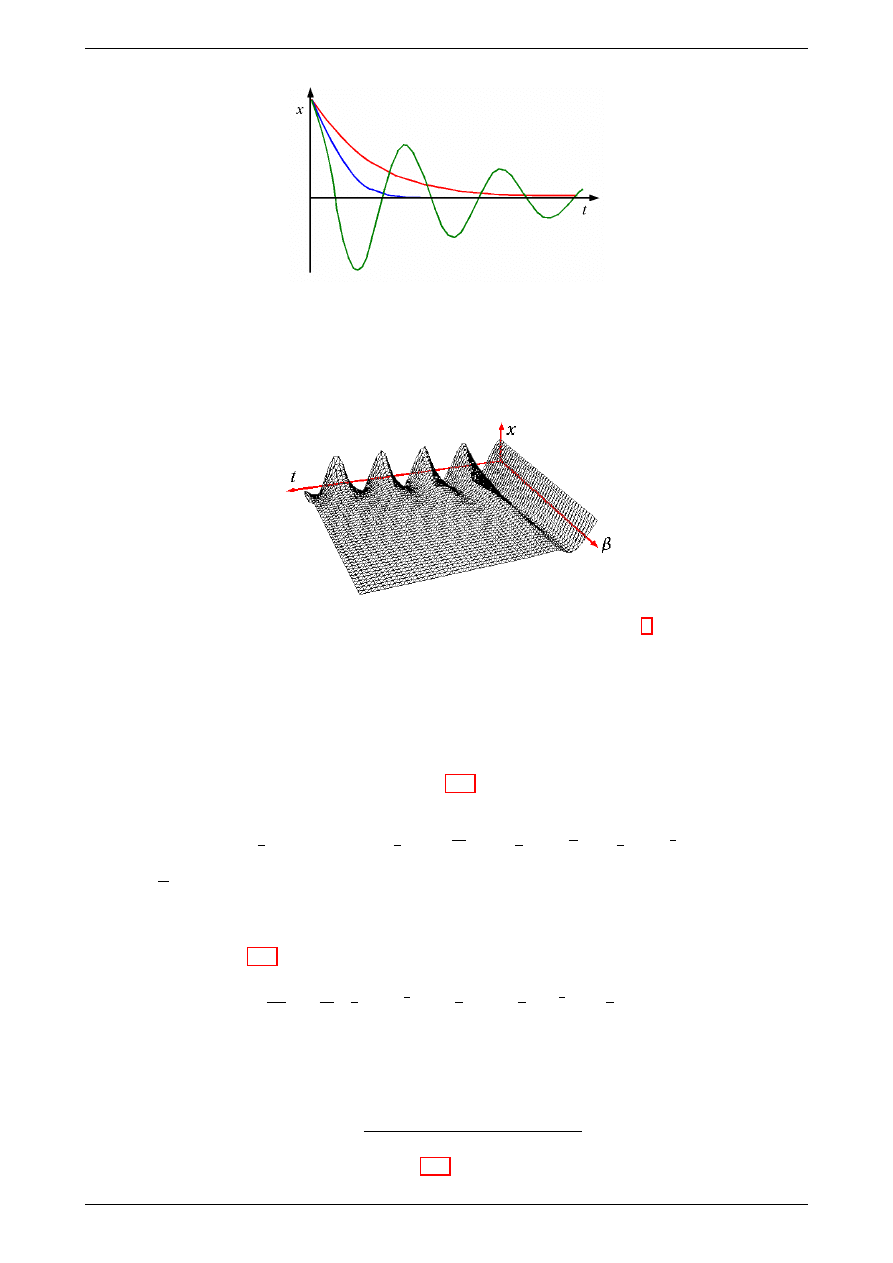
Wykres zależności (3.11) przedstawiono poniżej
Rysunek 1: Zależność wychylenia od czasu dla drgań tłumionych przy małym tłumieniu.
Rysunek 2: Drgania harmoniczne tłumione w przestrzeni fazowej.
c
Mariusz Krasiński 2011
4
3.3
Dyskusja możliwych postaci rozwiązania
3
DRGANIA HARMONICZNE TŁUMIONE
3.3.2
Przypadek 2 (tłumienie krytyczne)
Kiedy spełniony jest warunek
ω
2
o
−
β
2m
2
= 0
(3.13)
wtedy rozwiązanie równania (3.3) ma postać
x =
A − B
b
2m
t
e
−
β
2m
t
(3.14)
i przedstawia ruch aperiodyczny. Tłumienie odpowiadające warunkowi (3.13) nazywamy tłumieniem kryty-
cznym.
Aby zrozumieć skąd wzięła się taka postać rozwiązania równania (3.3) w przypadku (3.13) trzeba niestety wiedzieć
trochę więcej o równaniach różniczkowych.
3.3.3
Przypadek 3 (układ przetłumiony)
Kiedy tłumienie jest duże i spełniony jest warunek
ω
2
o
−
β
2m
2
< 0
wtedy rozwiązanie równania (3.3) przyjmuje postać
x = Ae
−
β
2m
t
e
±ω
00
t
(3.15)
i to także nie jest równanie ruchu periodycznego (dyskusja wykład ). Układ, którego zachowanie może być
opisane równaniem (3.15) nazywamy układem przetłumionym.
Uzasadnienie zależności (3.15)
Ponieważ wyrażenie
ω
2
o
−
β
2m
2
< 0
jest ujemne więc możemy je przekształcić w następujący sposób
s
ω
2
o
−
β
2m
2
=
v
u
u
t
−1
β
2m
2
− ω
2
o
!
=
√
−1
s
β
2m
2
− ω
2
o
= iω
00
(3.16)
gdzie
ω
00
=
s
β
2m
2
− ω
2
o
jest wielkością dodatnią.
Podstawiając (3.16) do (3.9) otrzymujemy
x = Ae
i
(
β
2m
i∓iω
00
)
t
= Ae
−
β
2m
t
e
±ω
00
t
(3.17)
3.3.4
Porównanie
Rysunek poniżej przedstawia na jednym wykresie zachowanie układu tłumionego, układu z tłumieniem kryty-
cznym oraz układu przetłumionego.
c
Mariusz Krasiński 2011
5
3.4
Energia oscylatora tłumionego
3
DRGANIA HARMONICZNE TŁUMIONE
Rysunek 3: Zależność wychylenia od czasu dla ciała wykonującego drgania harmoniczne, tłumione. Wykresy
odpowiadają różnym współczynnikom tłumienia. Uzupełnij opisy na wykładzie.
Sposób w jaki drga układ tłumiony, w zależności od wielkości tłumienia β, można przedstawić na trójwymi-
arowym wykresie
Rysunek 4: Rysunek przedstawia te same dane, które przedstawiono na rysunku 3 ale w postaci wykresu
trójwymiarowego.
W dalszym ciągu zajmiemy się tylko przypadkiem 1 czyli ruchem drgającym (periodycznym)
3.4
Energia oscylatora tłumionego
Korzystając z równania na energię oscylatora harmonicznego oraz z postaci zależności wychylenia od czasu,
dla ruchu tłumionego w przypadku małego tłumienia (3.11), możemy zapisać, że całkowita energia oscylatora
tłumionego wynosi
E =
1
2
k(Amplituda)
2
=
1
2
k
Ae
−
β
2m
t
2
=
1
2
kA
2
e
−
β
m
t
=
1
2
kA
2
e
−
t
τ
(3.18)
gdzie τ =
m
β
jest czasem relaksacji
3.4.1
Szybkość zmian energii
Na podstawie równania (3.18) możemy obliczyć szybkość zmian energii w ruchu harmonicznym tłumionym.
dE
dt
=
d
dt
1
2
kA
2
e
−
t
τ
=
1
2
kA
2
−
1
τ
e
−
t
τ
= −
1
τ
E
(3.19)
3.5
Dobroć oscylatora
Dobrocią oscylatora nazywamy wielkość zdefiniowaną jako
Q = 2π
energia zmagazynowana
energia tracona w jednym okresie
Biorąc pod uwagę definicję dobroci oraz zależność (3.19) możemy zapisać
c
Mariusz Krasiński 2011
6
3.6
Dekrement logarytmiczny tłumienia
4
DRGANIA HARM. WYMUSZ. Z TŁUM.
Q = 2π
E
dE
dt
T
= 2π
E
1
τ
ET
=
2π
T
τ = ω
0
τ
3.6
Dekrement logarytmiczny tłumienia
Dekrementem logarytmicznym tłumienia nazywamy wielkość będącą logarytmem stosunku amplitudy występu-
jącej w dowolnej chwili t podczas drgania tłumionego do amplitudy w chwili t + T . Wielkość ta wynosi więc
Λ = ln
A
n
A
n+1
= ln
Ae
−
β
2m
t
Ae
−
β
2m
(t+T )
!
= ln
e
β
2m
T
=
β
2m
T
i jest niezależna od czasu.
4
Drgania harmoniczne wymuszone z tłumieniem
4.1
Wymuszenie harmoniczne
Rozpatrzymy najprostszy przypadek gdy siła wymuszająca jest harmoniczna czyli ma postać
F = F
0
cos(ωt)
lub stosując zapis przy pomocy liczb zespolonych
F = F
0
e
iωt
Równanie ruchu będzie miało wtedy postać:
m
d
2
x
dt
2
+ β
dx
dt
+ kx = F
0
e
iωt
(4.1)
4.2
Rozwiązanie równania (4.1)
Postulujemy rozwiązanie postaci:
x = Ce
iωt
dlaczego?
(4.2)
Licząc podobnie jak w przypadku ruchu tłumionego odpowiednie pochodne położenia (zależność (4.2)) otrzy-
mamy:
dx
dt
= Ciωe
iωt
= iωx
(4.3)
d
2
x
dt
2
=
d
dt
dx
dt
= (iω)
2
Ce
iωt
= −ω
2
x
(4.4)
Po podstawieniu zależności (4.3) i (4.4) do równania głównego (4.1) otrzymamy:
−mω
2
x + βiωx + kx = F
0
x
C
a stąd
C =
F
0
m
k
m
− ω
2
+ iωβ
=
F
0
m(ω
0
2
− ω
2
) + iωβ
(4.5)
c
Mariusz Krasiński 2011
7
4.3
Rezonans
4
DRGANIA HARM. WYMUSZ. Z TŁUM.
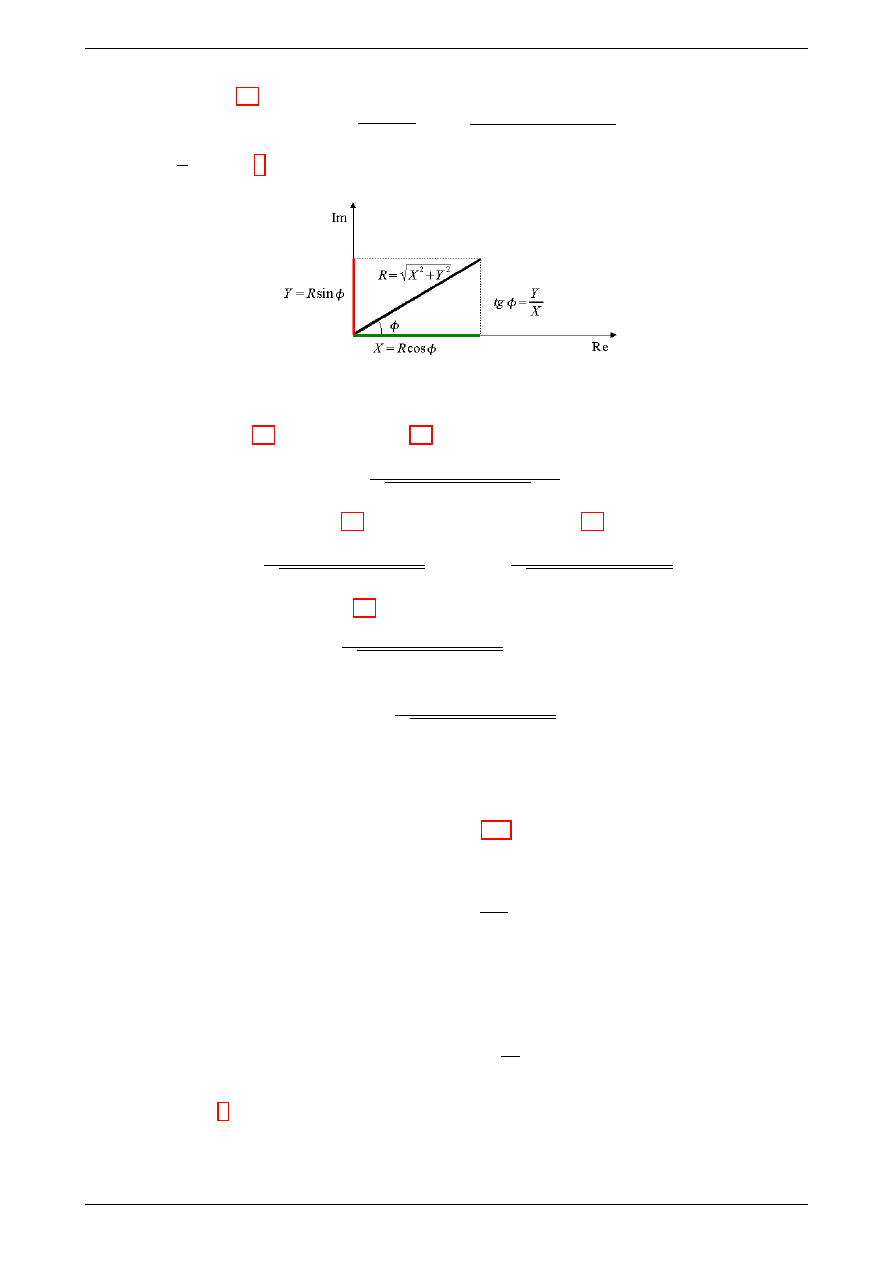
Mianownik zależności (4.5) jest liczbą zespoloną i ma postać X + iY . Można go więc zapisać w inny sposób
jako
mianownik =
p
X
2
+ Y
2
e
iφ
=
p
m
2
(ω
0
2
− ω
2
)
2
+ ω
2
β
2
e
iφ
(4.6)
gdzie tg φ =
Y
X
(rysunek 5)
Rysunek 5: Trygonometryczna postać liczby zespolonej.
Korzystając z zależności (4.6) możemy równanie (4.5) przepisać w postaci:
C =
F
0
pm
2
(ω
0
2
− ω
2
)
2
+ ω
2
β
2
e
iφ
(4.7)
Podstawiając B wyliczone z równania (4.7) do ogólnej postaci rozwiązania (4.2) otrzymamy ostateczne
x = Ce
iωt
=
F
0
pm
2
(ω
0
2
− ω
2
)
2
+ ω
2
β
2
e
−iφ
e
iωt
=
F
0
pm
2
(ω
0
2
− ω
2
)
2
+ ω
2
β
2
e
i(ωt−φ)
(4.8)
Czyli ostatecznie, rozwiązanie równania (4.1) ma postać
x =
F
0
pm
2
(ω
0
2
− ω
2
)
2
+ ω
2
β
2
cos(ωt + φ)
(4.9)
gdzie
A
wym
=
F
0
pm
2
(ω
0
2
− ω
2
)
2
+ ω
2
β
2
(4.10)
jest po prostu amplitudą drgań wymuszonych.
4.3
Rezonans
Amplituda drgań przedstawionych przy pomocy równania (4.10) będzie największa gdy wyrażenie pod pier-
wiastkiem będzie najmniejsze. Łatwo policzyć, że nastąpi to dla częstotliwości (rezonansowej) drgań spełniającej
zależność
ω
2
rez
= ω
2
0
−
β
2
2m
2
W przypadku małego tłumienia (małe β) otrzymamy
ω
rez
2
≈ ω
0
2
Amplituda drgań będzie wynosić wtedy
(Amplituda)
max
=
F
0
ωβ
Wielkość ta może przyjmować bardzo duże wartości, często niemożliwe z uwagi na ograniczoną wytrzymałość
obiektu drgającego (6).
Porównując wzory dla siły wymuszającej
F = F
0
e
iωt
c
Mariusz Krasiński 2011
8
4.4
Ruch wymuszony na wykresie fazowym
4
DRGANIA HARM. WYMUSZ. Z TŁUM.
i wychylenia
x = x
0
e
i(ωt−φ)
zauważyć można, iż drgania układu są przesunięte w fazie względem siły wymuszającej o φ
tgφ =
ωβ
m(ω
0
2
− ω
2
)
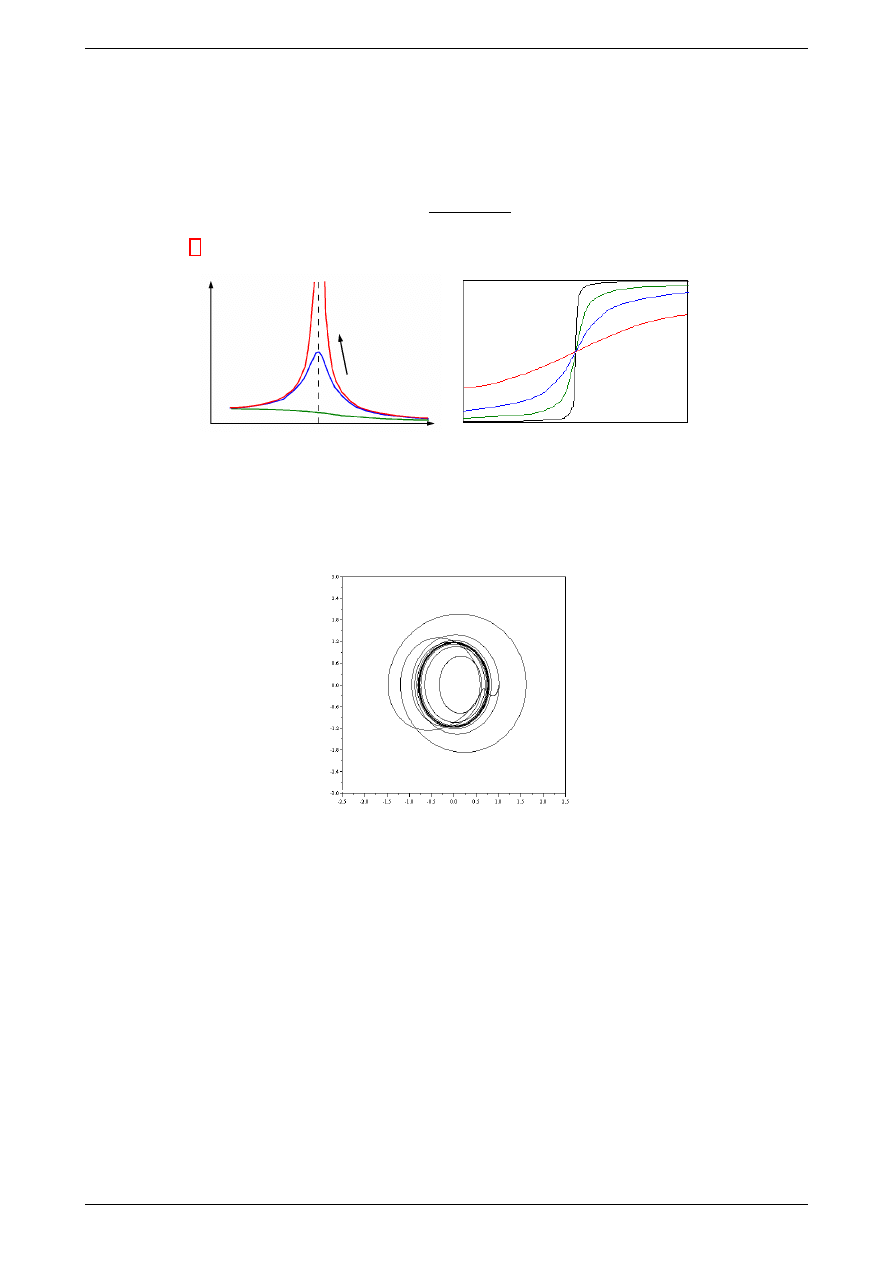
Zobacz rysunek 6.
Rysunek 6: Rezonans. Amplituda oraz przesunięcie fazowe pomiędzy siłą wymuszającą i wychyleniem. (dopisz
oznaczenia! )
4.4
Ruch wymuszony na wykresie fazowym
Rysunek 7: Typowy portret fazowy drgania wymuszonego z tłumieniem. Dopisz samodzielnie oznaczenia osi!
4.5
Dynamiczny tłumik drgań
Opis dynamicznego tłumika drgań zostanie przedstawiony na wykładzie.
c
Mariusz Krasiński 2011
9
4.5
Dynamiczny tłumik drgań
4
DRGANIA HARM. WYMUSZ. Z TŁUM.
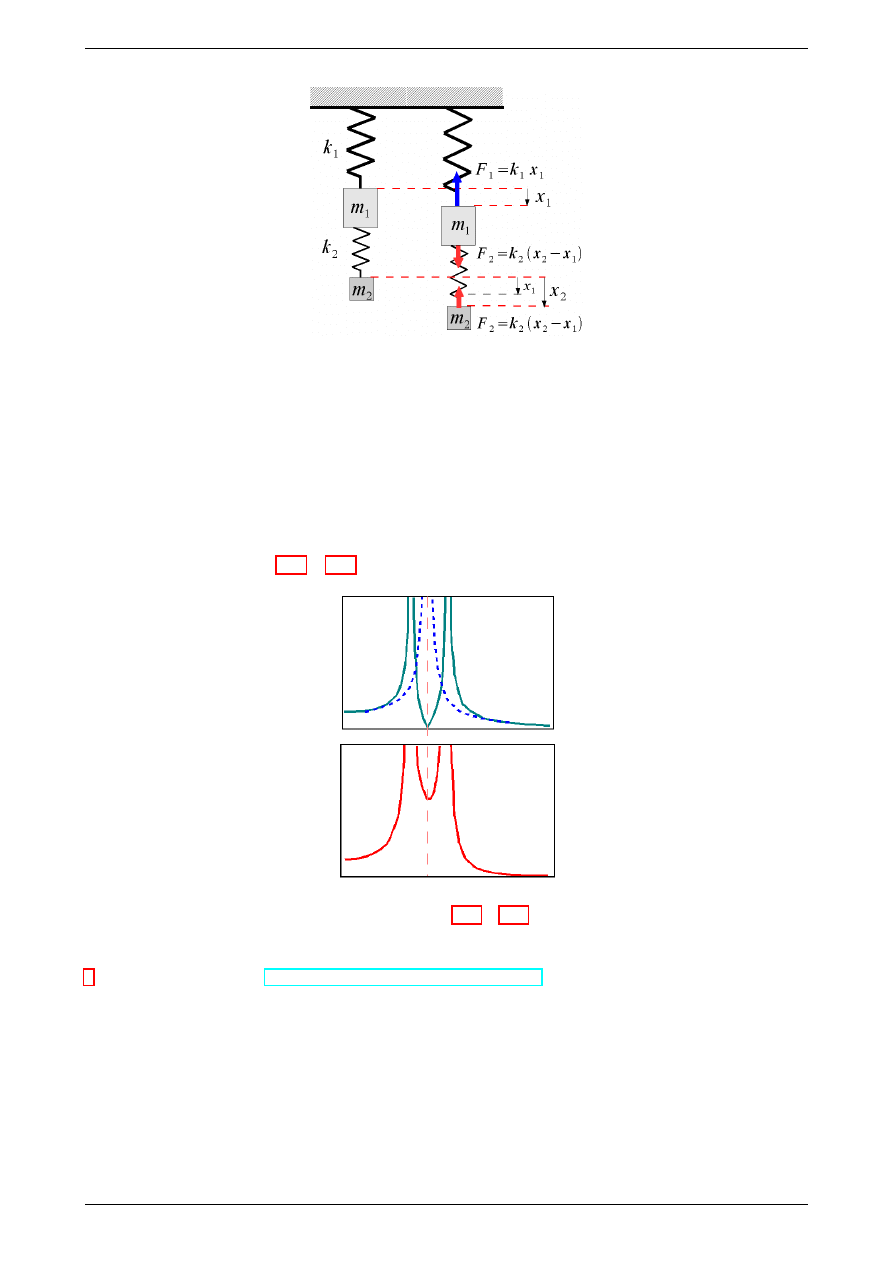
Rysunek 8: Siły działające na układ dwóch mas drgających. Ilustracja do opisu dynamicznego tłumika drgań.
Równania ruchu dla układu powyżej mają postać:
m
1
a
1
= −k
1
x
1
+ k
2
(x
2
− x
1
) + F
0
cos(ωt)
(4.11)
m
2
a
2
= −k
2
(x
2
− x
1
)
(4.12)
Rozwiązanie układu równań (4.11), (4.12) przedstawiono poniżej
Rysunek 9: Rozwiązanie układu równań (4.11), (4.12). Dodaj opisy na wykładzie.
Symulację pt. „Dynamiczny tłumik drgań”, przedstawiającą jak zachowuje się układ przedstawiony na rysunku
8 można znaleźć na stronie http://cmf.p.lodz.pl/markras/fizyka.
c
Mariusz Krasiński 2011
10
Document Outline
- III DRGANIA cd.
Wyszukiwarka
Podobne podstrony:
el inf 11 part02 drgania01
el inf 11 part05 fale02 id 1572 Nieznany
el inf 11 part10 QM1
el inf 11 part01 przyplywy
el inf 11 part09 dyfrakcjaplus
el mech 11 part06 drgania
el inf 11 part06 faleEM id 1572 Nieznany
el inf 11 part06 faleEM
el inf 11 part09 dyfrakcjaplus
el inf 11 part10 QM1
el inf 11 part05 fale02
el inf 11 part01 przyplywy
el inf zag 2016 s1
INF 11 REJESTRY
El en 11 12 seria1
System el en 11 12 1
El en 11 12 seria1 2
więcej podobnych podstron