
Do obliczania całki Mohra można wykorzystać formułę
Simpsona. Sposób ten daje dokładne wartości rozwiązania, jeżeli
jedna z funkcji jest funkcją liniową (
2
1
, M
M
są takie zawsze),
a druga z funkcji jest, co najwyżej drugiego stopnia (M
p
w tych
przedziałach, co obciążenie q równomiernie rozłożone).
Układ równań MS ma postać:
0
p
Δ
X
Δ
Macierz podatności układu jest równa:
M
A
M
Δ
T
gdzie:
,
,
2
1
M
M
M
– macierz momentów jednostkowych
A – jest quasi diagonalną macierzą zbudowaną z macierzy A
p
podatności na zginanie:
2
1
1
2
6EI
p
p
p
l
A
tam gdzie wykres M
p
jest
liniowy
1
0
0
0
4
0
0
0
1
6EI
p
p
p
l
A
tam gdzie wykres M
p
jest
2-go stopnia
Wektor wyrazów wolnych jest równy:
p
T
p
M
A
M
Δ
gdzie: M
p
– wektor momentu zginającego powstającego jako
skutek działania obciążenia zewnętrznego na UP
Rozwiązaniem jest wektor:
p
1
Δ
Δ
X
Moment zginający w układzie statycznie niewyznaczalnym:
X
M
M
M
p
Politechnika Rzeszowska, Katedra Mechaniki Konstrukcji, 10'2003
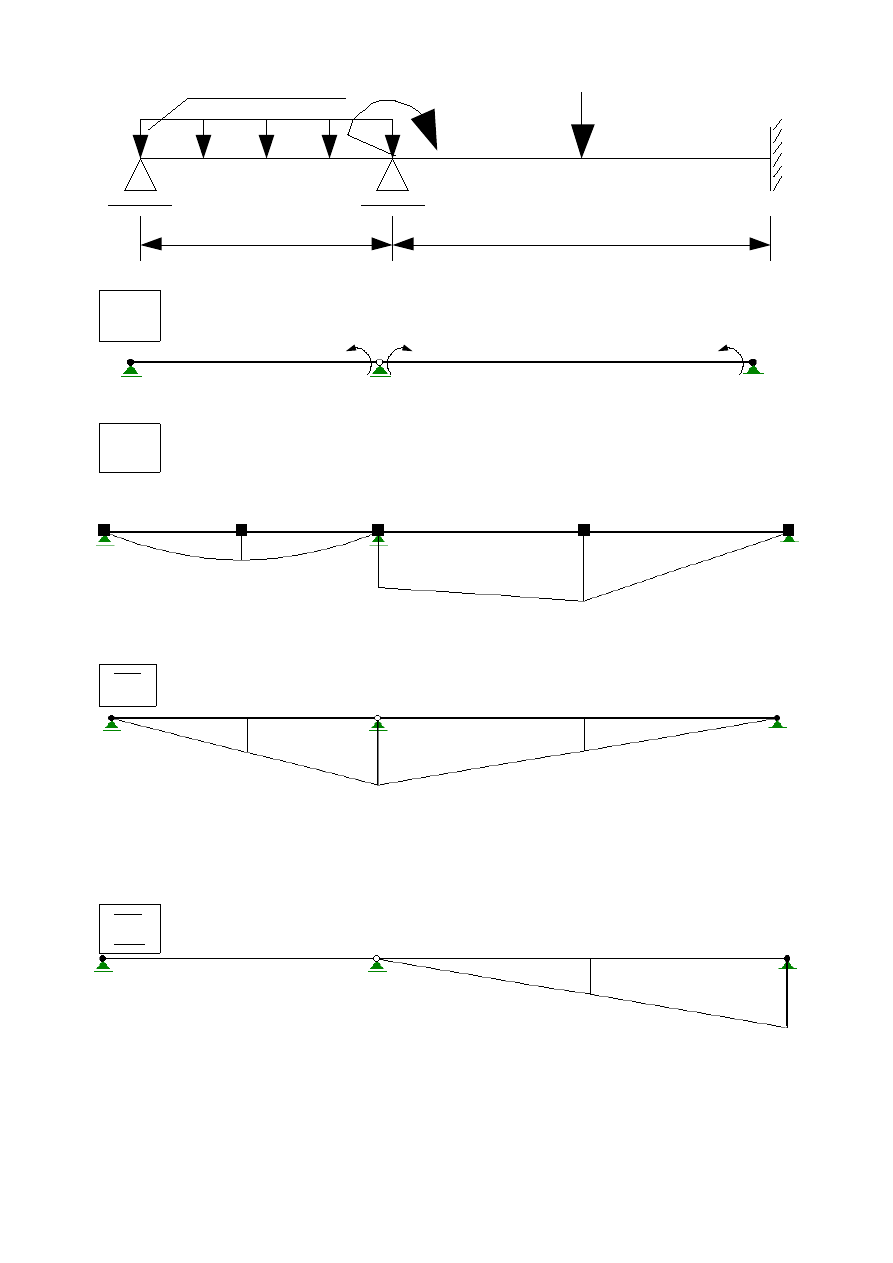
q=1,0 kN/m
4,0 m
6,0 m
EI
2EI
M=4 kNm
P=2 kN
X
1
X
1
X
2
I przedział
II przedział
III przedział
wykres opisany jedną
wykres liniowy
inny wykres liniowy
funkcją 2go stopnia
1
3 4
5 6
7
2
2,0
5,0
4,0
0]
5;
5;
4;
0;
2;
[0;
p
M
0,5
1,0
0,5
0]
1/2;
1/2;
1;
1;
1/2;
[0;
M1
0,5
1,0
1]
1/2;
1/2;
0;
0;
0;
[0;
M2
Politechnika Rzeszowska, Katedra Mechaniki Konstrukcji, 10'2003
UP
1
M
2
M
1
M
p
M

%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Metoda sil w ujeciu macierzowym
% Belka dwukrotnie stat. niewyzn.
% Matlab: G. Piatkowski 10.2002
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear all
% Wektory momentow jednostkowych
% ##### Wprowadzic rzedne wykresow jednostkowych Mi
M1 = [0; 0.5; 1; 1; 0.5; 0.5; 0]
M2 = [0; 0; 0; 0; 0.5; 0.5; 1]
% Wektor momentu od obciazenia zewnetrznego
% ##### Wprowadzic rzedne wykresu Mp
Mp = [0; 2; 0; 4; 5; 5; 0]
% Utworzenie macierzy momentow jednostkowych
% ##### Uwzglednic liczbe macierzy Mi
M = [M1 M2]
% Wspolcz. do calk. wg formuly Simpsona
% ##### Uwzglednic liczbe przedzialow,
% ##### ich dlugosci i sztywnosc
% ##### oraz stopien wykresu
A1 = 4/(6*1)*[1 0 0; 0 4 0; 0 0 1];
A2 = 3/(6*2)*[2 1; 1 2];
A3 = 3/(6*2)*[2 1; 1 2];
% Deklaracja macierzy A
wym = length(M1);
A = zeros(wym);
ip = 1;
% Zbudowanie quasi diagonalnej macierzy podatnosci
% Petla powtarza obliczenia dla kolejnych macierzy A1, A2, A3, ...
% ##### Zmienic liczbe powtorzen „i” adekwatnie do liczby przedzialow
for i=1:3
% okreslenie rozmiaru kolejnej macierzy A1, A2, A3, ...
r = eval(['length(','A',int2str(i),')']);
% Obliczenie indeksu koncowego
ik = ip + (r - 1)
% wbudowanie na przekatna macierzy A kolejnej macierzy A1, A2, A3, ..
A(ip:ik, ip:ik) = eval(['A',int2str(i)])
% aktualizacja indeksu poczatkowego
ip = ik + 1;
end
% Obliczenie macierzy podatnosci
d = M'*A*M
% Obliczenie wektora wyrazow wolnych
dp = M'*A*Mp
% Rozwiazanie rownania MS
X = -inv(d)*dp
% Obliczenie rzednych wykresu momentu zginajacego
Mk = Mp + M*X
Politechnika Rzeszowska, Katedra Mechaniki Konstrukcji, 10'2003
Wyszukiwarka
Podobne podstrony:
mms belka
mms belka sprezyste
mms belka
mms belka statyczne
mms belka pozastatyczne
DYD 9 PRAWO KARNE Folie
Hala CECHOWANIE BELKA SPRĘŻONA ok
folie dachowe ruukki
10 Laczenie, podzial, przekszta lcanie spolek FOLIE
belka spr podl
kratownica belka 57
wyklad 3-folie, Różności
Folie-CZ-SK-3wyklad, Turystyka i rekreacja wykłady, Turystyka w Czechach i Słowacji
Ściąga PNS na folię
js soc folie
więcej podobnych podstron