Janusz KOWAL
Janusz KOWAL
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza
Hutnicza
Podstawy Automatyki
Podstawy Automatyki
Wykład 7
Stabilność liniowych
stacjonarnych układów
sterowania
Wykład 7
Wykład 7
Stabilno
Stabilno
ść
ść
liniowych
liniowych
stacjonarnych uk
stacjonarnych uk
ł
ł
ad
ad
ó
ó
w
w
sterowania
sterowania
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
2
9
Ogólne warunki stabilności
9
Matematyczne warunki stabilności
9
Kryterium Hurwitza
9
Kryterium Michajłowa
9
Kryterium Nyquista
9
Logarytmiczne kryterium stabilności
Plan wykładu:
Plan wykładu:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
3
9
Stabilność
układu sterowania jest
najważniejszą jego cechą charakteryzującą
zdolność układu do wykonywania zadań dla
których został on zbudowany.
Ogólne warunki stabilności
9
Stabilność
jest pojęciem określającym - w
potocznym znaczeniu - zdolność układu do
zachowania pewnego stanu.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
4
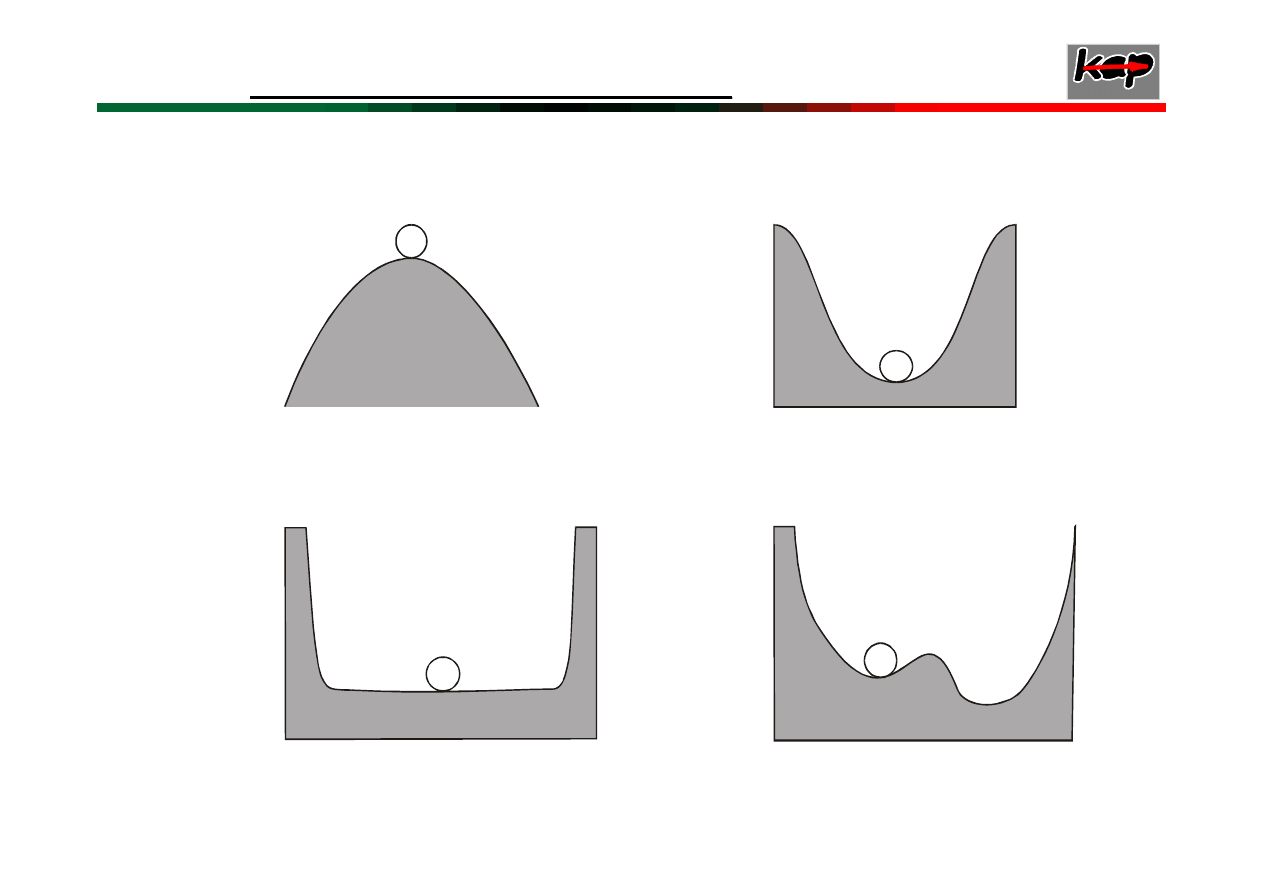
stabilna lokalnie
a)
c)
b)
d)
Rodzaje równowagi:
niestabilna
stabilna asymptotycznie
stabilna nieasymptotycznie
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
5
Przez
stabilność
układu automatycznej
regulacji (UAR), rozumiemy właściwość układu
polegającą na:
9
powrocie do stanu równowagi stałej po ustaniu
działania wymuszenia, które wytrąciło układ z
tego stanu, lub
9
osiągnięciu nowego stanu równowagi stałej,
jeśli wymuszenie pozostało na stałym poziomie.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
6
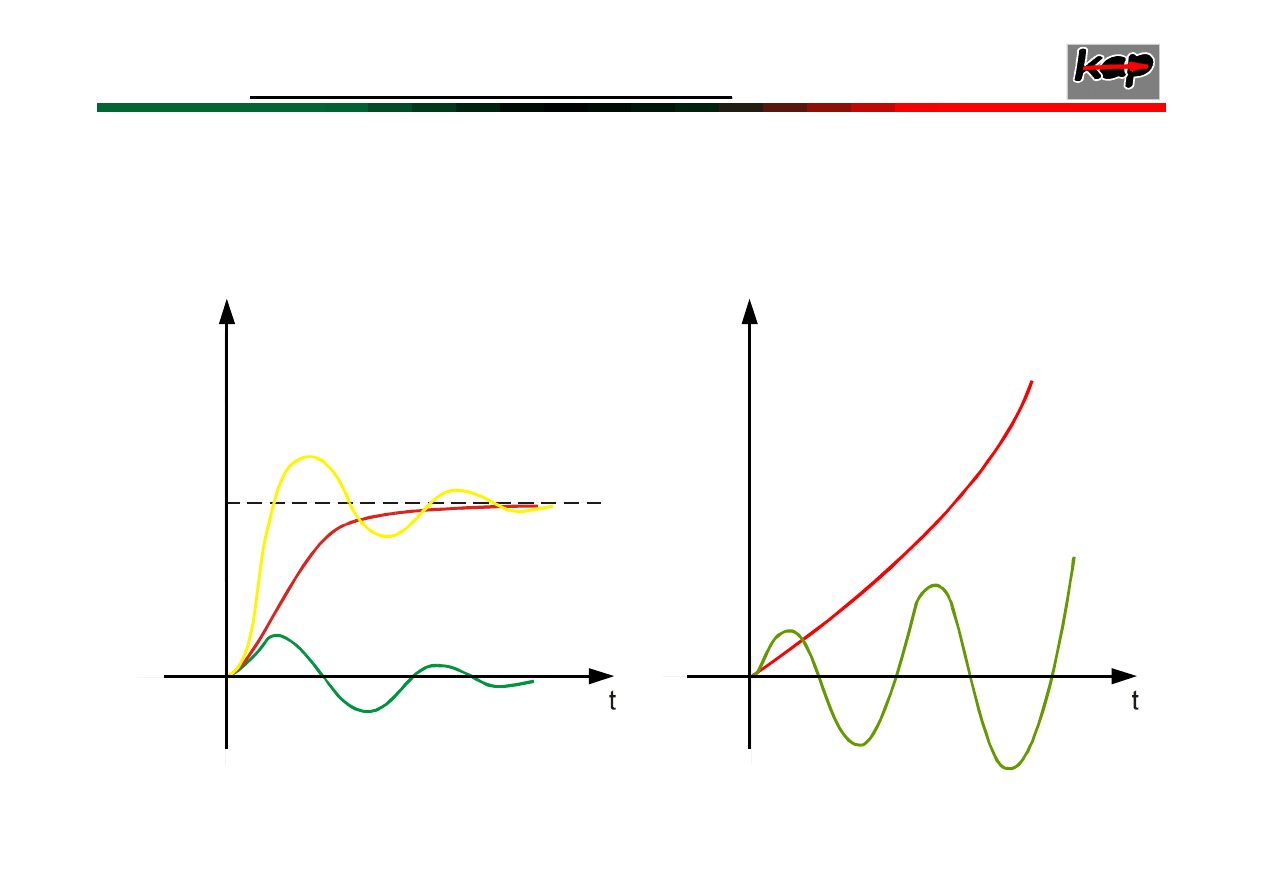
układów niestabilnych
y
y
Przykładowe charakterystyki czasowe
układów stabilnych
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
7
9
ogólnego
y
0
(t)
0
lim
0
=
∞
→
(t)
y
t
Analityczne sformułowanie warunków
stabilności -
korzystamy z równania różniczkowego opisującego
dynamikę układu
x
b
dt
dx
b
....
dt
x
d
b
y
a
dt
dy
a
....
dt
y
d
a
dt
y
d
a
m
m
n
n
n
n
n
n
0
1
0
0
1
1
1
+
+
+
=
+
+
+
+
−
−
Rozwiązanie tego równania jest sumą dwóch rozwiązań
Ponieważ rodzaj sygnału wejściowego nie ma znaczenia
przy badaniu stabilności, układ będzie stabilny gdy
9
szczególnego
y
s
(t)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
8
0
0
1
1
1
=
+
+
+
+
−
−
a
s
a
...
s
a
s
a
n
n
n
n
0
0
1
1
1
1
=
+
+
+
+
−
−
−
y
a
dt
dy
a
...
dt
dy
a
dt
dy
a
n
n
n
n
n
n
W celu sprawdzenia czy układ jest stabilny,
należy zbadać rozwiązanie ogólne równania
różniczkowego jednorodnego
Korzystając z przekształcenia Laplace’a
otrzymamy równanie
algebraiczne
zwane
równaniem charakterystycznym
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
9
Pierwiastki równania charakterystycznego mogą
przybrać wartości:
t
s
n
t
s
t
s
n
e
C
...
e
C
e
C
(t)
y
+
+
+
=
2
1
2
1
0
Rozwiązanie możemy zapisać w postaci
∑
=
=
n
i
t
s
i
i
e
C
(t)
y
1
0
gdzie: C
i
- stałe całkowania wynikające z warunków
początkowych
s
i
- pierwiastki równania charakterystycznego
9
rzeczywiste dodatnie lub ujemne,
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
10
9
zespolone z częścią rzeczywistą dodatnią,
zerową lub ujemną
W zależności od wartości pierwiastków
otrzymujemy różne przebiegi
t)
ω
A
t
ω
(A
e
t
ω
A
t
ω
(A
e
(t)
y
t
α
t
α
2
4
2
3
1
2
1
1
0
sin
cos
sin
cos
2
1
+
+
+
+
=
Jeżeli są pierwiastkami
tego równania to rozwiązanie ma postać:
2
2
3,4
1
1
2
,
1
s
,
ω
α
ω
α
j
j
s
±
=
±
=
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
11
0
t
1
A
Im
Re
Wpływ lokalizacji pierwiastków na stabilność układu
0
t
1
A
t
s
e
3
t
s
e
2
−
t
s
e
1
−
s
1
s
2
s
3
Im
Re
-j
ω
+j
ω
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
12
0
t
1
A
Im
Re
-j
ω
+j
ω
α
α
Wpływ lokalizacji pierwiastków na stabilność układu
Im
Re
-j
ω
+j
ω
-
α
-
α
0
1
A
t
t
ω
sin
t
α
e
−
t
ω
sin
e
t
α
−
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
13
9
jeżeli chociażby jedna z części rzeczywistych s
i
jest dodatnia to
y
0
(t)
zmierza do nieskończoności
czyli układ jest niestabilny
9
przebiegi y
o
(t) zanikają w funkcji czasu, jeżeli
pierwiastki równania charakterystycznego są
rzeczywiste ujemne lub zespolone o częściach
rzeczywistych ujemnych.
Z przedstawionych wykresów wynika, że:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
14
9
Koniecznym i dostatecznym warunkiem stabilności
asymptotycznej układu jest aby pierwiastki równania
charakterystycznego układu zamkniętego leżały w
lewej półpłaszczyźnie płaszczyzny zmiennej
zespolonej s (miały ujemne części rzeczywiste)
9
jeżeli równanie charakterystyczne ma pierwiastki w lewej
półpłaszczyźnie oraz jednokrotne na osi liczb urojonych, to
układ jest na granicy stabilności (nie jest stabilny
asymptotycznie)
9
jeżeli pierwiastki są zerowe lub są wielokrotne to układ jest
niestabilny
Re(s
k
)<0 i wtedy
0
lim
0
=
∞
→
(t)
y
t
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
15
Matematyczne warunki stabilności
9
stabilność układu w stanie swobodnym (gdy na
układ nie działają
sygnały zewnętrzne,
zarówno sterujące jak i zakłócające)
9
stabilność
układu poddanego działaniom
zewnętrznym
Wyróżniamy dwa rodzaje stabilności:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
16
Przyjmijmy, że jeżeli układ swobodny znajduje się
w
stanie równowagi
czyli
0
=
(t)]
t),...,y
F[y(t),y'(
(n)
Stan dynamiczny układu mo
ż
emy określić na
podstawie znajomości wektora y(t) w przestrzeni
fazowej.
to odpowiadający temu
punkt równowagi
w
przestrzeni fazowej umieszczamy w początku jej
układu współrzędnych.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
17
9
Jeżeli dla t
→∞
trajektoria nie wychodzi poza
pewien ograniczony obszar otaczający początek
układu współrzędnych, to układ jest
stabilny w
sensie Lapunowa
.
9
Jeżeli dla t
→∞
trajektoria oddala się
nieskończenie do początku układu
współrzędnych to układ jest
niestabilny.
9
Jeżeli dla t
→∞
trajektoria dąży do początku
układu współrzędnych (punkt równowagi) to
układ jest
stabilny asymptotycznie.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
18
Stabilność Lapunowa
zachodzi gdy dla liczby
dodatniej
ε
można znaleźć taką liczbę
δ
, żeby
przy
obowiązywała nierówność:
Przez
||
y
||
będziemy oznaczać w przestrzeni
fazowej będącej liniową przestrzenią wektorową,
normę wektora
y o składowych y
1
,y
2
,.....,y
n
równą:
[
]
(t)
y
...
(t)
y
(t)
y
(t)
y
y(t)
n
n
k
k
2
2
2
2
1
1
2
+
+
+
=
=
∑
=
||
y(t
0
)
|| <
δ
||
y(t)
|| <
ε
dla t>t
0
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
19
i dla t>t
0
trajektoria dążyła do początku układu
współrzędnych tzn.
Stabilność asymptotyczna
zachodzi gdy można
dobrać dodatnią liczbę
δ
żeby przy spełnionym
warunku
δ
)
y(t
<
0
0
→
+∞
→
t
y(t)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
20
9
lub dochodzi do obszaru określonego wzorem
Stabilność globalna
zachodzi w przypadku gdy układ
jest stabilny dla dowolnych warunków początkowych.
9
osiąga początek układu współrzędnych
(stabilność globalna asymptotyczna),
Wtedy trajektoria układu swobodnego wychodząca z
dowolnego punktu przestrzeni fazowej:
i pozostaje w nim (stabilność globalna w sensie
Lapunowa).
||
y(t)
|| <
ε
dla
t>t
0
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
21
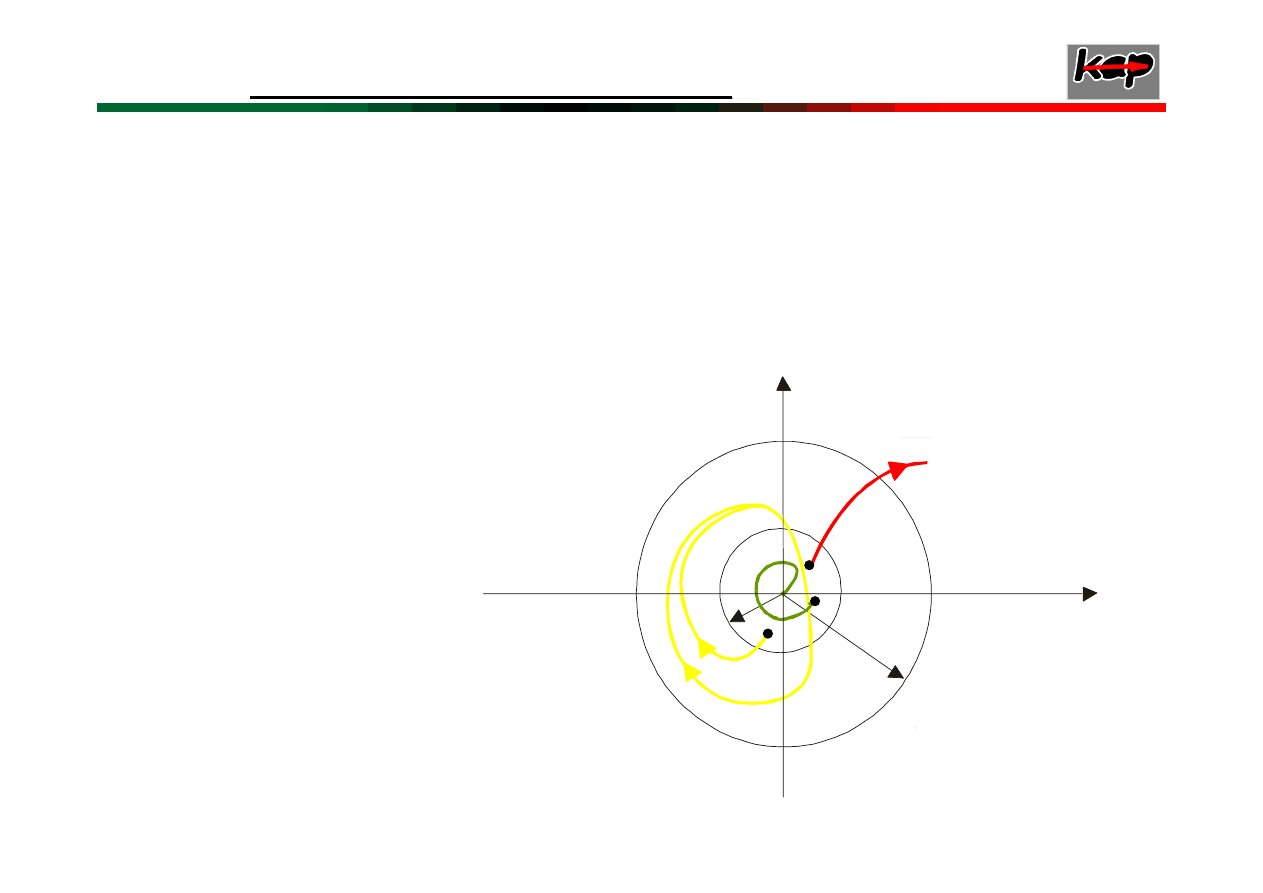
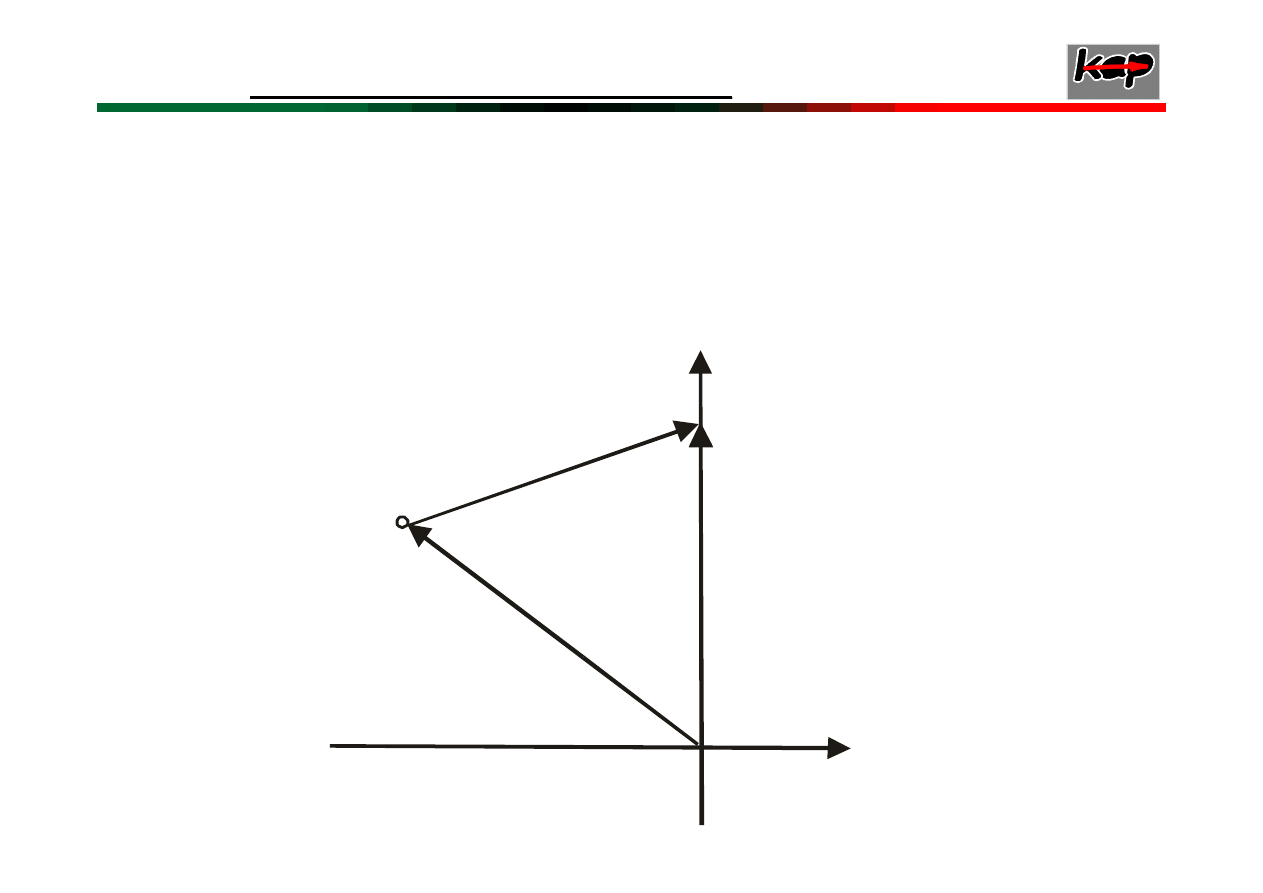
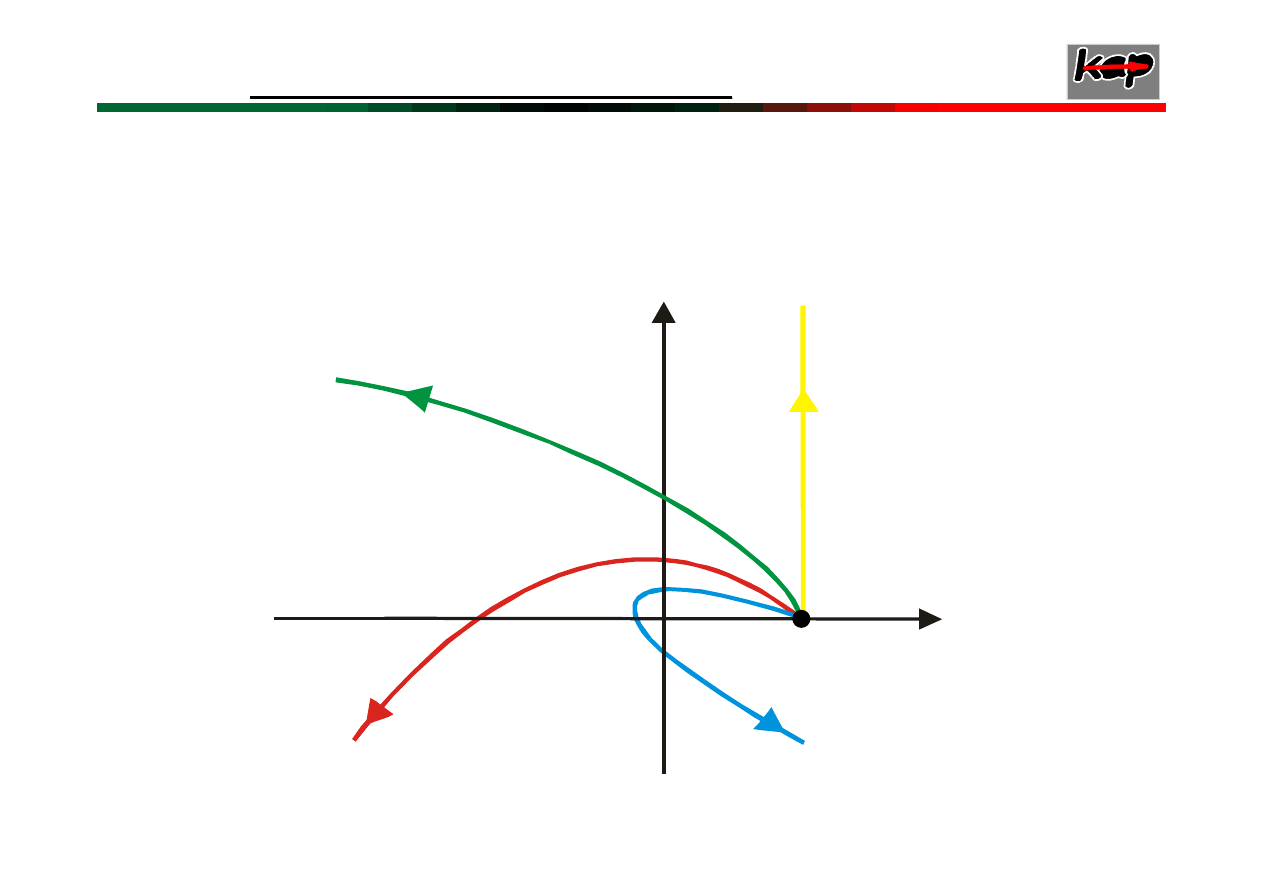
Przebiegi trajektorii fazowej dla układu II-go rzędu
wychodzące z punktu:
9
A
0
- dla układu stabilnego
w sensie Lapunowa,
9
B
0
- dla układu stabilnego
asymptotycznie,
9
C
0
- dla układu niestabilnego
B
0
0
C
C
0
A
0
δ
8
0
y
2
y
1
ε
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
22
W przypadku
układu liniowego
stan swobodny
jest opisany jednorodnym równaniem liniowym o
stałych współczynnikach
Rozwiązanie ogólne równania różniczkowego n-go
rzędu, zwyczajnego liniowego o stałych
współczynnikach i jednorodnego
zależy od
pierwiastków równania charakterystycznego
0
0
1
1
1
=
+
+
+
+
−
−
−
y(t)
a
dt
dy(t)
...
dt
y(t)
d
a
dt
y(t)
d
a
n
n
n
n
n
n
0
0
1
1
1
+
+
+
+
+
−
−
a
s
a
...
s
a
s
a
n
n
n
n
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
23
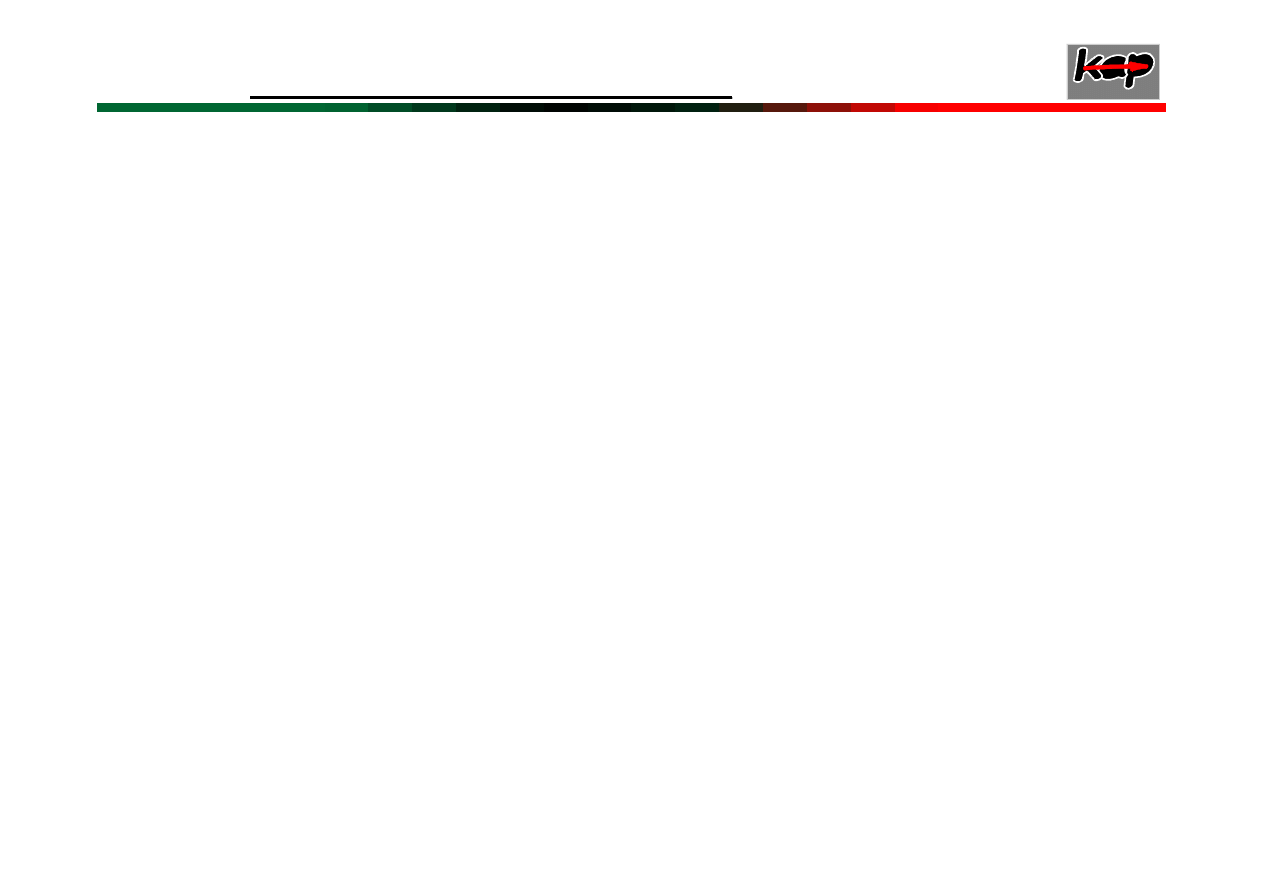
9
Równanie charakterystyczne ma wyłącznie
pojedyncze pierwiastki rzeczywiste ujemne
czyli układ jest stabilny asymptotycznie.
Dla przykładu rozpatrzymy szereg przypadków:
t
t
Be
Ae
s
B
s
A
L
)
)(s
(s
L(s)
L
g(t)
2
1
1
2
1
2
1
−
−
−
−
+
=
+
+
+
=
+
+
=
0
lim
=
∞
→
g(t)
t
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
24
9
Równanie charakterystyczne ma oprócz
pojedynczych ujemnych pierwiastków
rzeczywistych ma również wielokrotne
pierwiastki rzeczywiste ujemne
wtedy układ jest również stabilny asymptotycznie.
t
t
t
Cte
Be
Ae
s
C
s
B
s
A
L
)
)(s
(s
L(s)
L
g(t)
2
2
1
2
1
2
2
1
2
1
−
−
−
−
−
+
=
+
+
+
+
+
=
+
+
=
0
lim
=
∞
→
g(t)
t
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
25
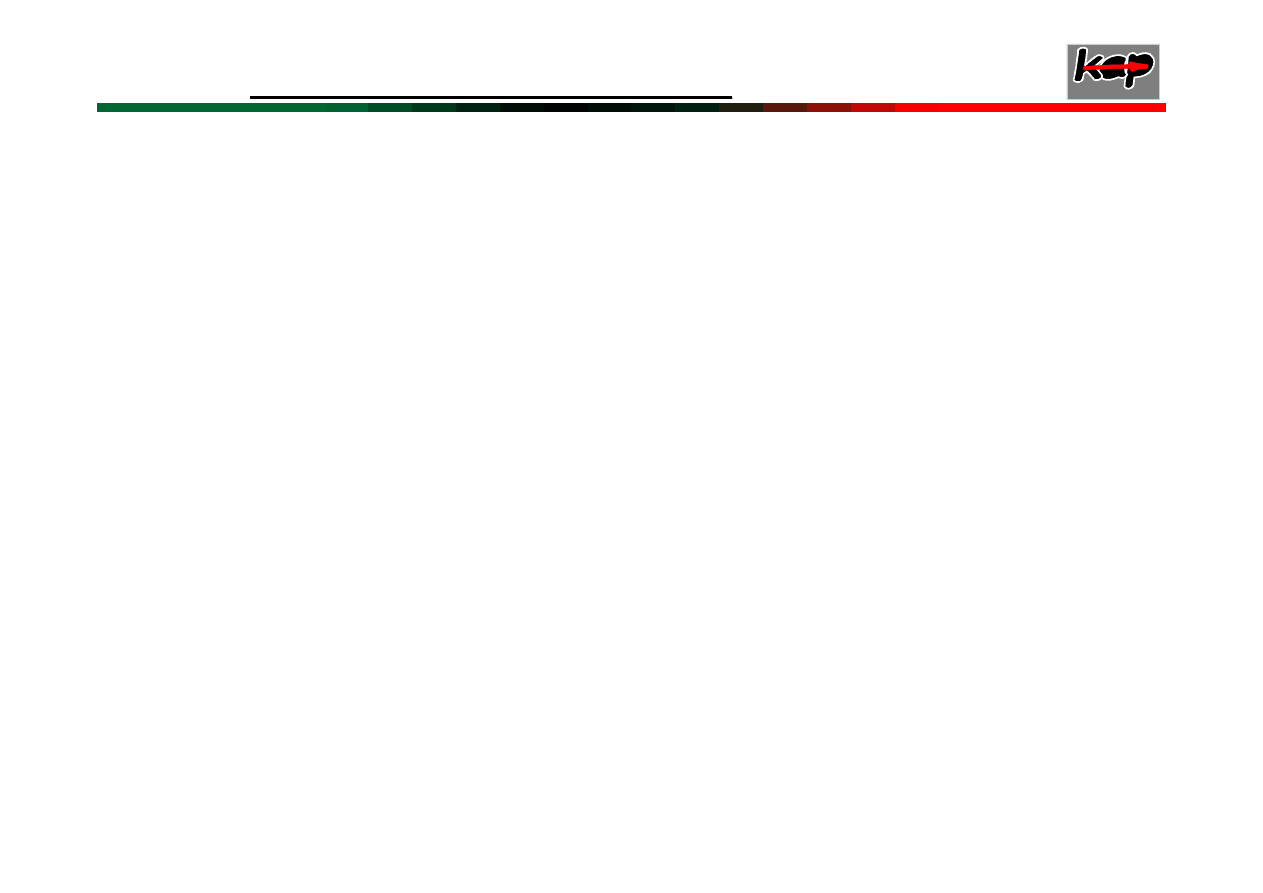
9
Równanie charakterystyczne ma rzeczywiste
pierwiastki ujemne i pierwiastki zespolone o
częściach rzeczywistych ujemnych
wtedy układ jest stabilny asymptotycznie, bo
występują sinusoidy o gasnącej amplitudzie.
3
sin
3
3
cos
4
2
1
4
2
1
2
1
2
1
⋅
−
+
+
=
=
+
+
+
+
+
=
+
+
+
=
−
−
−
−
−
t
e
B
C
t
Be
Ae
s
s
C
Bs
s
A
L
)
s
)(s
(s
L(s)
L
g(t)
t
t
t
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
26
9
Równanie charakterystyczne ma oprócz
pierwiastków o ujemnych częściach
rzeczywistych jeden pierwiastek zerowy
Stabilność nieasymptotyczna związana jest z
występowaniem jednego pierwiastka zerowego;
układ stabilny w sensie Lapunowa.
B
Ae
s
B
s
A
L
)s
(s
L(s)
L
g(t)
t
+
=
+
+
=
+
=
−
−
−
1
1
1
2
1
B
g(t)
t
=
∞
→
lim
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
27
9
Równanie charakterystyczne oprócz pierwiastków
ujemnych ma wielokrotny pierwiastek zerowy
wtedy układ jest niestabilny
Ct
B
Ae
s
C
s
B
s
A
L
)s
(s
L(s)
L
g(t)
t
+
+
=
+
+
+
=
+
=
−
−
−
2
1
2
1
1
1
∞
=
∞
→
g(t)
t
lim
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
28
9
Równanie charakterystyczne oprócz
pierwiastków ujemnych ma pierwiastki dodatnie
wtedy układ jest niestabilny
t
-
t
Be
Ae
s-
B
s
A
L
)
)(s-
(s
L(s)
L
g(t)
2
1
1
2
1
2
1
+
=
+
+
=
+
=
−
−
−
∞
=
∞
→
g(t)
t
lim
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
29
9
Równanie charakterystyczne oprócz
pierwiastków ujemnych ma pierwiastki
zespolone o dodatniej części rzeczywistej
wtedy układ jest niestabilny
=
+
−
+
+
+
=
+
−
+
=
−
−
4
2
1
4
2
1
2
1
2
1
s
s
C
Bs
s
A
L
)
s
)(s
(s
L(s)
L
g(t)
∞
=
∞
→
g(t)
t
lim
3
sin
3
3
cos
1
⋅
+
+
+
=
−
t
e
B
C
t
Be
Ae
t
t
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
30
9
Równanie charakterystyczne oprócz
pierwiastków ujemnych ma pierwiastki zespolone
o zerowych częściach rzeczywistych
wtedy występują
drgania niegasnące
- układ
stabilny w sensie Lapunowa.
t
C
t
B
Ae
s
B
s
A
L
)
)(s
(s
L(s)
L
g(t)
t
2
sin
2
2
cos
4
1
4
1
2
1
2
1
+
+
=
+
+
+
=
+
+
=
−
−
−
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
31
Warunek konieczny stabilności Lapunowa jest
następujący:
9
krotność par pierwiastków urojonych powinna
być co najwyżej równa jedności.
9
krotność pierwiastków rzeczywistych równych
zeru,
9
wszystkie pierwiastki rzeczywiste i
części
rzeczywiste pierwiastków zespolonych powinny
być ujemne,
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
32
9
występuje jeden pierwiastek rzeczywisty równy
zeru,
9
występują pojedyncze (nie wielokrotne) pary
pierwiastków urojonych,
9
przy jednym pierwiastku rzeczywistym równym
zeru występują pojedyncze (nie wielokrotne)
pary pierwiastków urojonych.
Gdy spełniony jest powyższy warunek konieczny,
układ jest stabilny w sensie Lapunowa gdy:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
33
Warunkiem koniecznym i wystarczającym
stabilności asymptotycznej jest, aby wszystkie
pierwiastki rzeczywiste oraz części rzeczywiste
pierwiastków urojonych były ujemne, możemy
zapisać:
Globalna stabilność asymptotyczna występuje
gdy układ jest stabilny asymptotycznie
0
)
Re(
<
k
s
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
34
Najbardziej znanymi są kryteria :
9
analityczne
Hurwitza
9
analityczne
Routha
9
kryterium graficzne
Michajłowa
9
analityczno-graficzne
Nyquista
Pierwsze dwa kryteria wymagają znajomości
transmitancji układu w postaci analitycznej.
Kryteria graficzne oparte są na charaktery-
stykach częstotliwościowych.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
35
Kryterium Hurwitza
Warunkiem koniecznym i wystarczającym
, żeby
układ liniowy stacjonarny ciągły był
stabilny
asymptotycznie jest aby:
1) wszystkie współczynniki równania charakterystycznego
0
0
1
1
1
=
+
+
+
+
−
−
a
s
a
...
s
a
s
a
n
n
n
n
,...,n
,
,
,i
a
i
2
1
0
0
=
>
były różne od zera i jednakowego znaku
2) wszystkie podwyznaczniki główne (
minory
) wyznacznika
Hurwitza były większe od zera.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
36
0
2
4
1
3
0
2
1
3
1
3
1
4
2
5
3
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
n
n
n
n
n
n
n
n
n
n
n
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
∆
−
−
−
−
−
−
−
−
−
0
1
1
>
=
∆
−
n
a
0
2
3
1
2
>
=
∆
−
−
−
n
n
n
n
a
a
a
a
0
0
3
1
4
2
1
5
3
1
3
>
=
∆
−
−
−
−
−
−
−
−
n
n
n
n
n
n
n
n
a
a
a
a
a
a
a
a
;
;
Kryterium Hurwitza pozwala na sprawdzenie czy równanie
algebraiczne dowolnego stopnia ma wyłącznie pierwiastki
ujemne lub o ujemnych częściach rzeczywistych.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
37
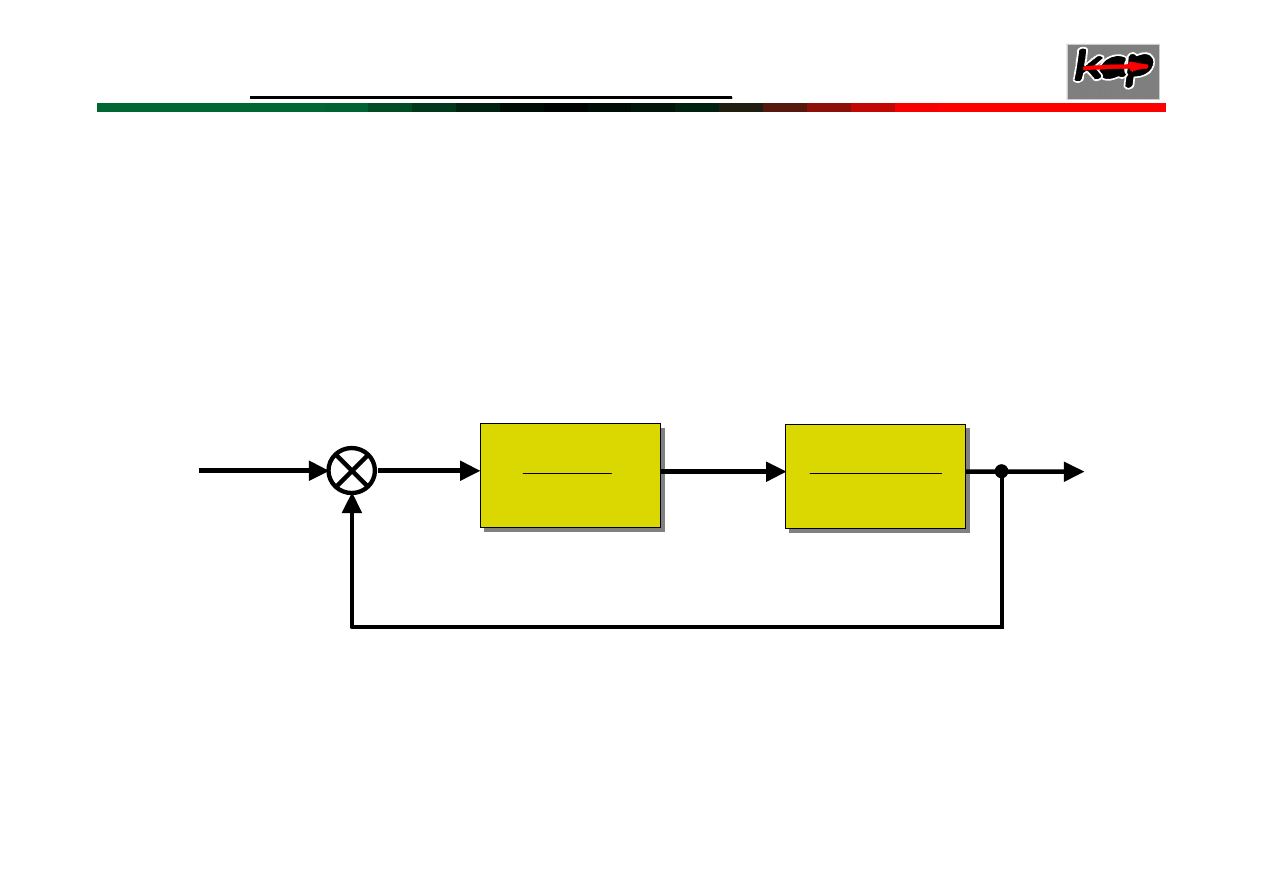
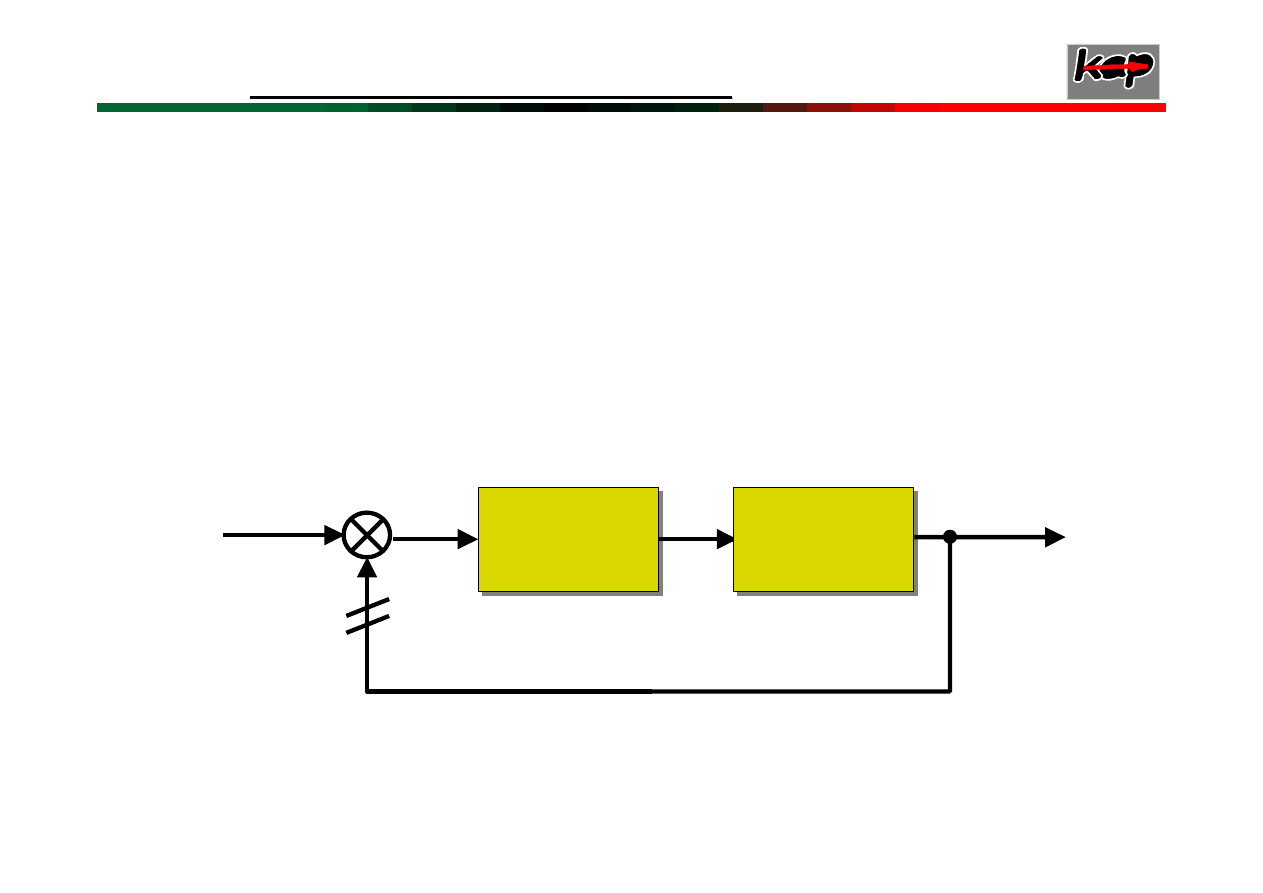
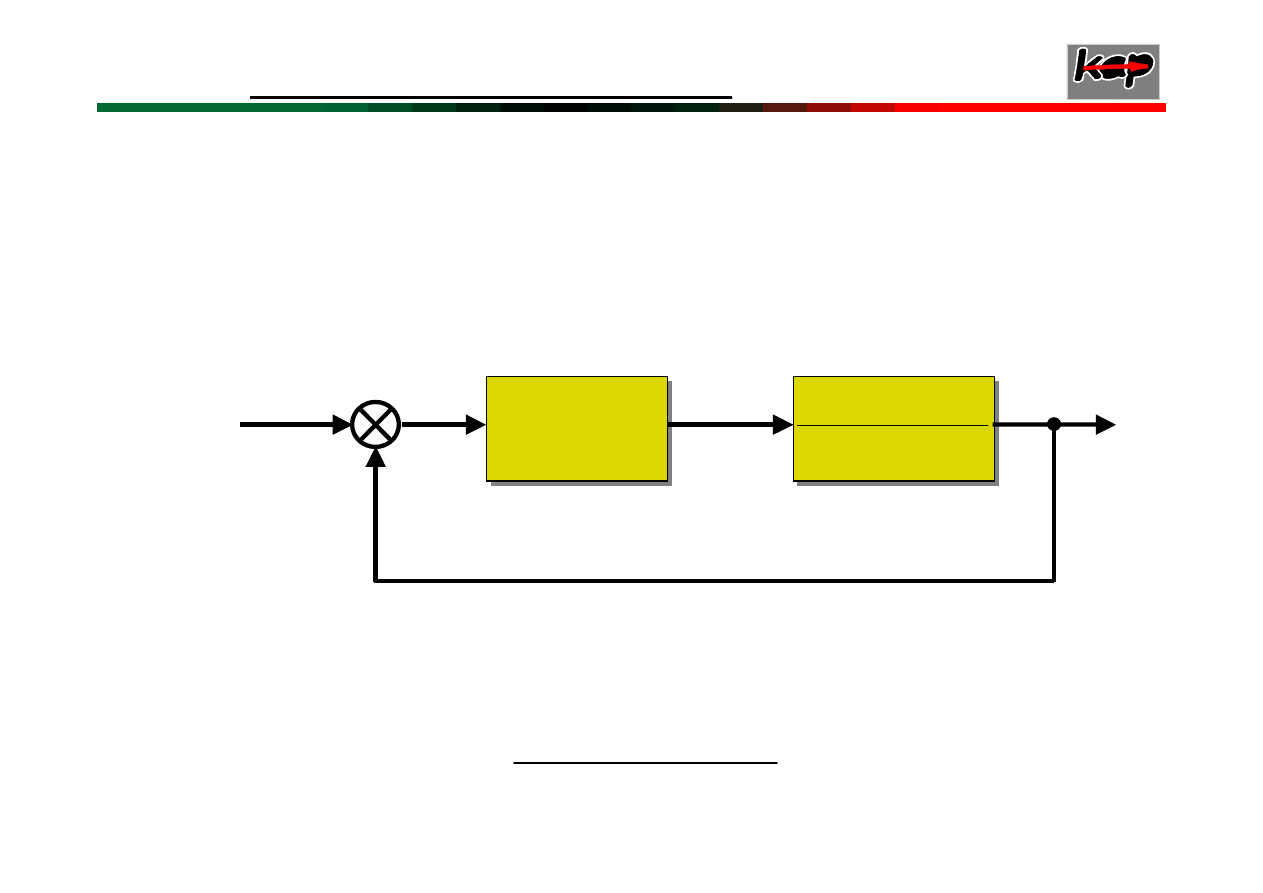
Przykład 1
Dany jest układ regulacji automatycznej o
schemacie przedstawionym na rysunku i
transmitancjach:
E(s)
U(s)
1
s
T
K
1
1
+
Y(s)
)
1
s
T
(
s
K
2
2
+
–
W(s)
Wyznaczyć zakresy parametrów K
1
, K
2
, T
1
, i T
2
,
przy których układ jest stabilny.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
38
Transmitancja operatorowa
układu zamkniętego
2
1
2
1
2
1
0
0
1
1
1
K
K
)
s
)(T
s
s(T
K
K
G
G
G
G
G(s)
R
R
+
+
+
=
+
=
Równanie charakterystyczne
ma postać
a po przekształceniu
0
2
1
2
2
1
3
2
1
=
+
+
+
+
K
K
s
)s
T
(T
s
T
T
W tym przypadku n=3, należy więc zbadać tylko
wyznacznik drugiego stopnia
0
1
1
2
1
2
1
=
+
+
+
K
K
)
s
)(T
s
s(T
2
1
2
1
2
1
2
1
2
1
2
1
1
0
3
2
2
1
T
T
K
K
T
T
K
K
T
T
T
T
a
a
a
a
∆
−
+
=
+
=
=
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
39
Aby układ był stabilny, parametry regulatora T
1
i K
1
muszą spełniać warunek
2
1
2
1
1
1
K
K
T
T
>
+
Aby układ był na
granicy stabilności
, musi
zachodzić zależność
2
1
2
1
1
1
K
K
T
T
=
+
Wówczas równanie charakterystyczne ma postać
0
1
2
1
2
2
1
=
+
+
)
K
K
)(s
s
T
(T
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
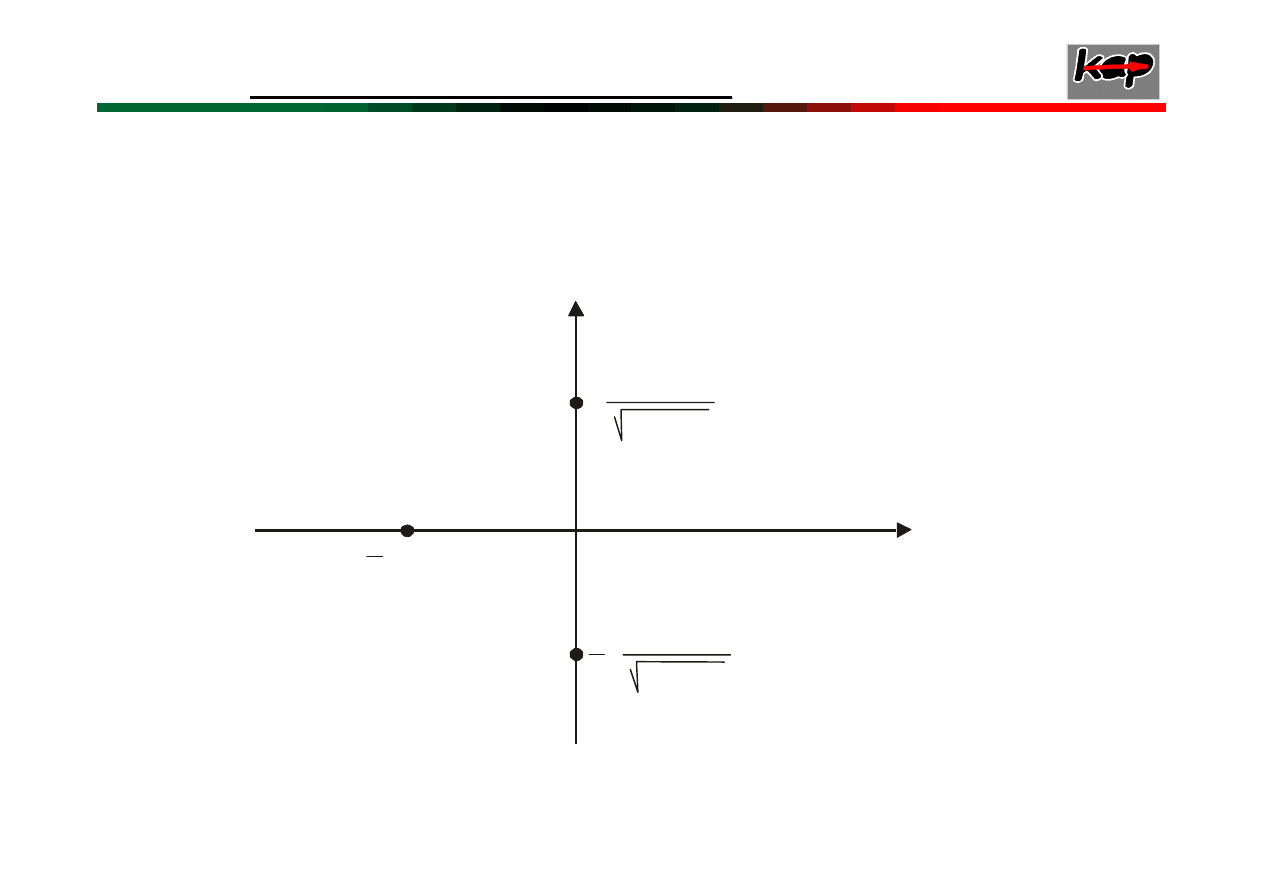
40
Rozkład
pierwiastków
tego równania pokazano
na poniższym rysunku
Im
Re
1
K
1
K
2
1
T
1
T
2
T
1
T
2
j
j
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
41
Kryterium Hurwitza umożliwia stwierdzenie
stabilności:
Możliwość wystąpienia stabilności nieasympto-
tycznej zachodzi wtedy, kiedy w równaniu
charakterystycznym współczynnik a
0
=0.
9
asymptotycznej
9
nieasymptotycznej
Po podzieleniu stron równania przez s,
otrzymujemy równanie stopnia n-1 w odniesieniu
do którego stosujemy kryterium Hurwitza.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
42
Kryterium Michajłowa
Kryterium Michajłowa
służy do oceny stabilności
układu liniowego jednowymiarowego, a właściwie
do uzyskania
metodą graficzną odpowiedzi na
pytanie:
ile pierwiastków równania charaktery-
stycznego leży w prawej półpłaszczyźnie?
Umożliwia ono badanie stabilności na podstawie
przebiegu na płaszczyźnie zmiennej zespolonej
wykresu funkcji N(j
ω
), otrzymanej z wielomianu
charakterystycznego po podstawieniu s=j
ω
0
1
1
1
a
s
a
...
s
a
s
a
N(s)
n
n
n
n
+
+
+
+
=
−
−
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
43
Wyrażenie to zapiszemy w postaci
)
s
.(s
).........
s
)(s
s
(s
a
N(s)
k
n
−
−
−
=
2
1
gdzie: s
k
(k=1,2,...,n)
po obraniu s= j
ω
otrzymujemy
m)π
(n
mπ
m)π
(n
)
N(jω
arg
∆
2
−
=
−
−
=
lub inaczej
jΦ
e
)
N(j ω
)
N(j ω
=
gdzie:
n
n
s
jω
...
s
jω
a
)
N(j ω
−
−
=
2
n
s
jω
arg
....
s
jω
arg
)
N(jω
arg
Φ
−
+
+
−
=
=
1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
44
Wektor
odpowiadający j
ω
jest położony na osi
urojonej i końce poszczególnych wektorów
przedstawiających czynniki (j
ω−
s
k
) znajdują się
na tej osi na rysunku poniżej.
S
Re
Im
k
S
k
jω−
j
ω
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
45
Jeżeli będziemy zmieniać pulsację
ω
, w zakresie
od
−
∞
do
+
∞
, to stwierdzimy, że
zmiana
argumentu wektora
(j
ω−
s
k
) zależy od położenia
punktu odpowiadającego s
k
na płaszczyźnie
zmiennej zespolonej.
9
W przypadku gdy punkt ten leży w
lewej
półpłaszczyźnie
wektor (j
ω−
s
k
) przy zmianie
−
∞
<ω<+
∞
obróci się w kierunku przeciwnym do
ruchu wskazówek zegara o kąt
+π
9
Natomiast gdy punkt odpowiadający s
k
leży w
prawej półpłaszczyźnie
to wektor (j
ω−
s
k
) przy
zmianie
−
∞
<ω<+
∞
obróci się w kierunku
zgodnym z ruchem wskazówek zegara o kąt
− π
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
46
Jeżeli z liczby wszystkich pierwiastków n, m
pierwiastków znajduje się
w
prawej
półpłaszczyźnie
a (n-m) w lewej to zmiana
argumentu N(j
ω
) przy
−
∞
<ω<+
∞
Ponieważ
warunkiem stabilności jest aby
wszystkie pierwiastki miały
ujemne części
rzeczywiste
(czyli m=0), to:
m)π
(n
mπ
m)π
(n
)
N(jω
arg
∆
2
−
=
−
−
=
−
∞
<ω<+
∞
−
∞
<ω<+
∞
R
e
s
k
<
0
jeżeli
∆
argN(j
ω
)=n
π
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
47
Układ regulacji automatycznej jest stabilny
wtedy i tylko wtedy, gdy zmiana argumentu
krzywej N(j
ω
) przy zmianie pulsacji
−
∞
<ω<+
∞
wynosi n(
π
/2) gdzie n oznacza stopień równania
charakterystycznego tzn.
Kryterium Michajłowa
można sformułować
następująco :
2
nπ
)
N(jω
arg
∆
=
−
∞
<ω<+
∞
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
48
Przykładowe wykresy
Michajłowa
układów
stabilnych asymptotycznie rzędu od n=4 do n=1
n=4
n=3
n=2
n=1
0
=
ω
(
)
(
ω
jQ
)
ω
P
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
49
Przykład 2
Dany jest układ regulacji automatycznej jak na
rysunku. Zbadać stabilność układu, wykorzystując
kryterium Michajłowa, jeśli T
1
=0.14s, T
2
=2s i
K=10. Jakie powinno byś K by układ znalazł się na
granicy stabilności?
Schemat blokowy układu regulacji
U(s)
2
1
)
1
s
T
(
K
+
Y(s)
s
T
1
2
–
W(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
50
Transmitancja zastępcza układu zamkniętego
Przekształcając
mianownik
transmisji
G
z
(s),
otrzymujemy wielomian charakterystyczny układu
po podstawieniu danych
10
2
56
0
04
0
2
3
+
+
+
=
s
s
,
s
,
N(s)
K
)
s
s(T
T
s
KT
s
T
)
s
(T
K
)
s
(T
K
(s)
G
z
+
+
=
⋅
+
+
+
=
2
1
2
2
2
1
2
1
1
1
1
1
1
K
s
T
s
T
T
s
T
T
N(s)
+
+
+
=
2
2
2
1
3
2
2
1
2
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
51
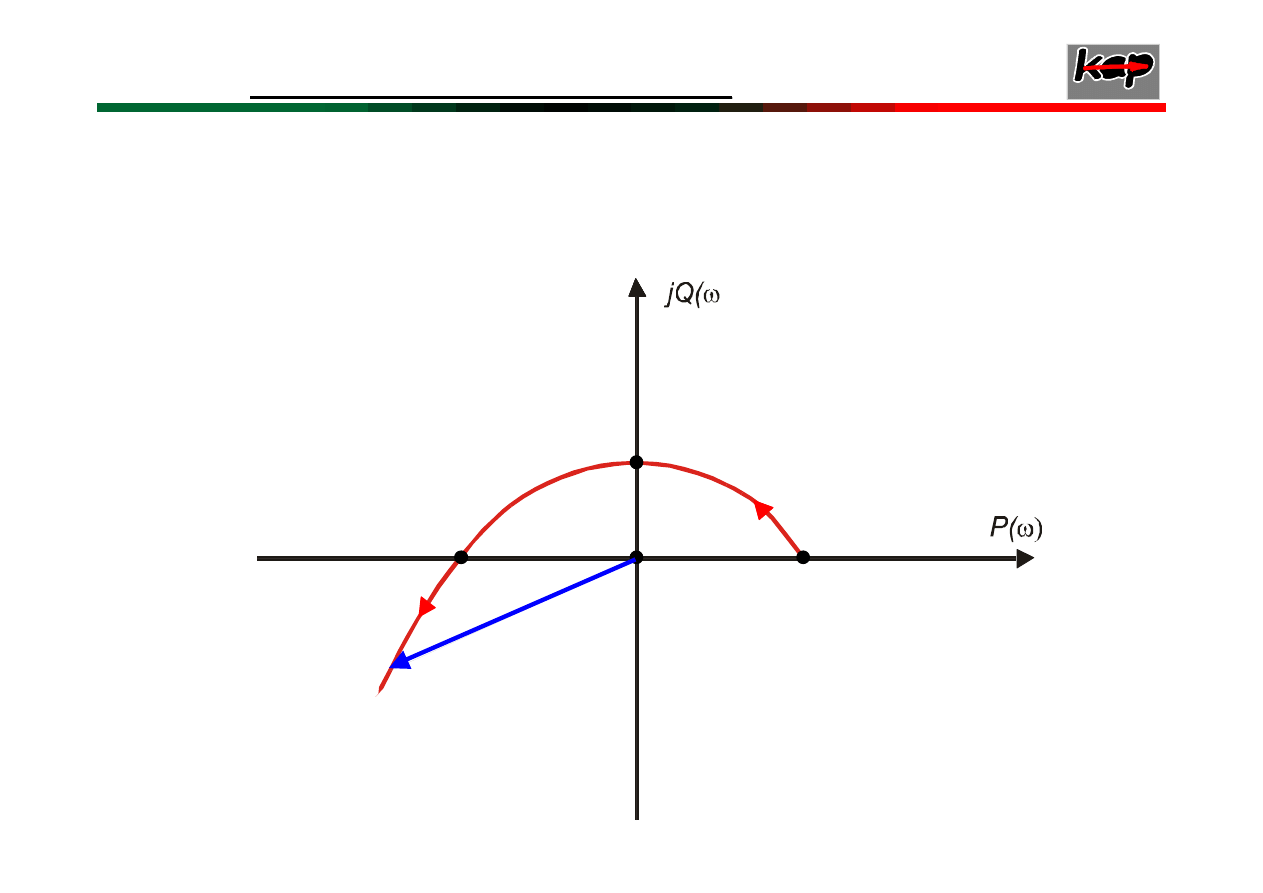
Podstawiając s=j
ω
oraz wyodrębniając część
rzeczywistą i urojoną
otrzymamy
Następnie rozwiązujemy równania P(
ω
)=0
i
Q(
ω
)=0 znajdując w ten sposób punkty, przy
których wykres Michajłowa przecina osie.
)
ω
,
(
jω
ω
,
)
jQ(ω
)
P(ω
)
N(jω
2
2
04
0
2
56
0
10
−
+
−
=
+
=
Wykres krzywej N(j
ω
) przedstawiono na rysunku
poniżej.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
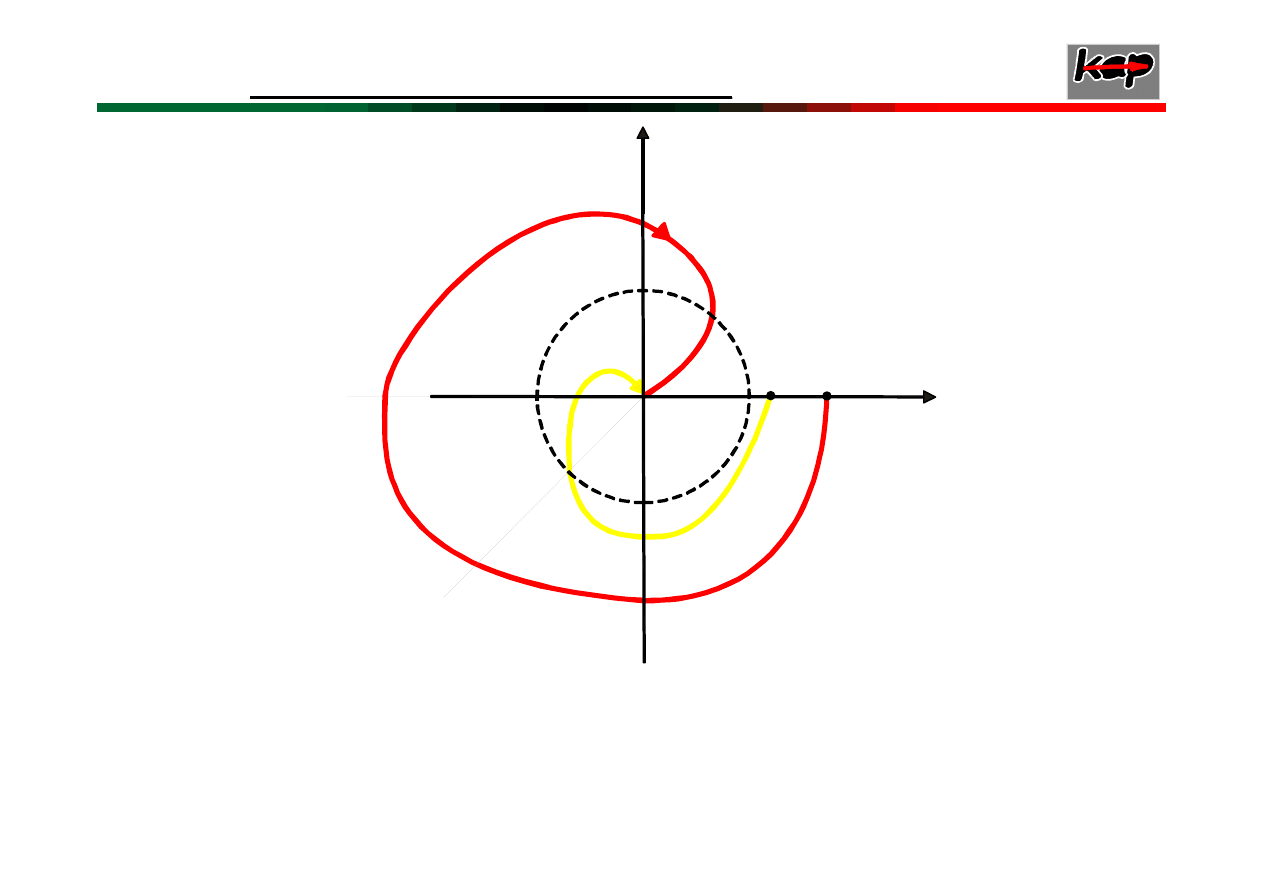
52
0
)
Wykres tego przechodzi kolejno przez trzy ćwiartki
płaszczyzny zmiennej zespolonej, więc układ jest
stabilny.
ω
1
5,44
-18
ω
3
ω
2
= 0
10
ω =
8
N j
)
( ω
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
53
Uzupełnieniem
kryterium Michajłowa
jest
następujące twierdzenie:
)
,
(
ω
π
m)
(n
N(jω(
∆
∞
∈
⋅
−
=
0
2
2
arg
Całkowita
zmiana argumentu
wielomianu
charakterystycznego N(j
ω
) niestabilnego układu
liniowego
jednowymiarowego rzędu n-tego,
którego m pierwiastków leży w prawej
półpłaszczyźnie wynosi:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
54
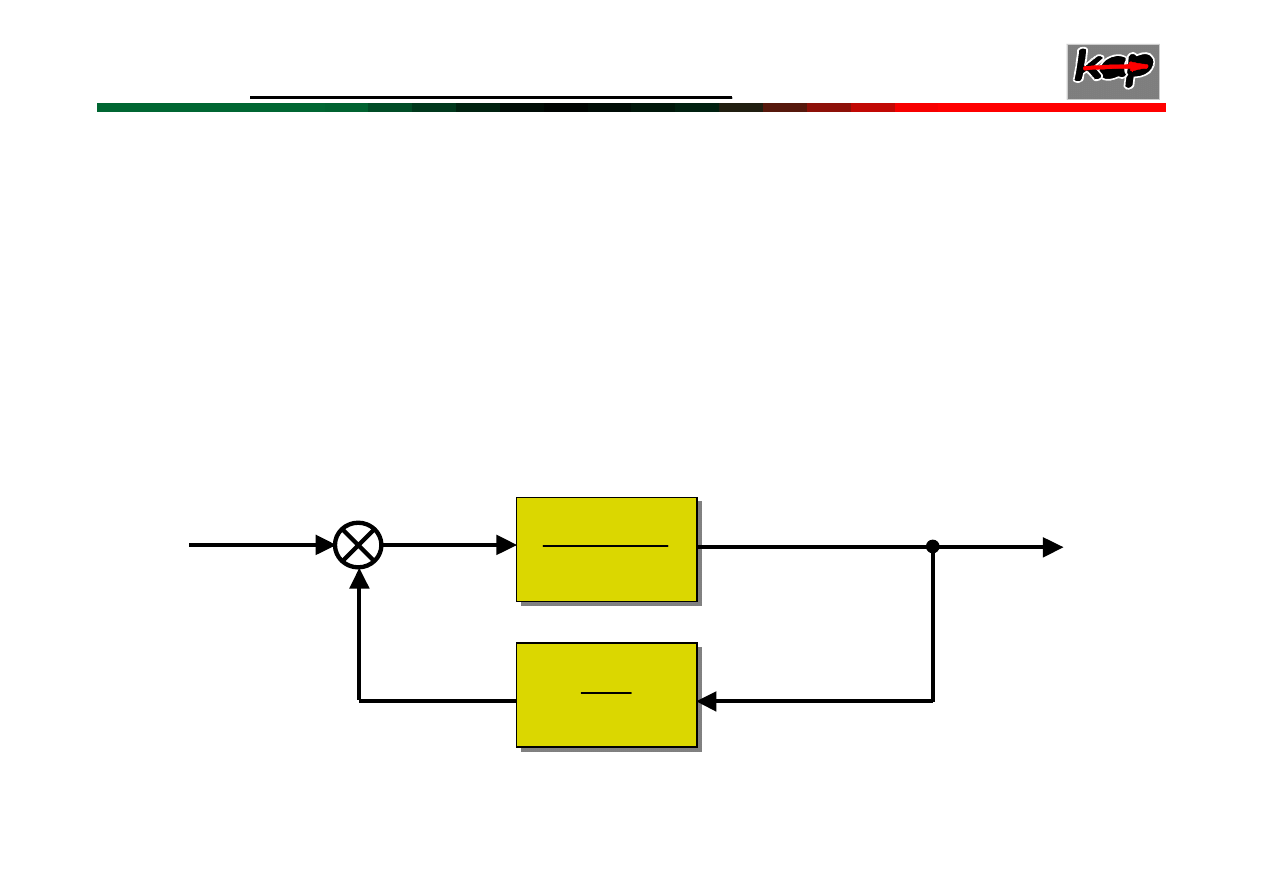
Kryterium Nyquista
Kryterium Nyquista
jest graficznym sposobem
oceny stabilności układu zamkniętego na podstawie
znajomości
charakterystyki częstotliwościowej
układu otwartego.
Schemat blokowy układu regulacji
)
s
(
G
R
Y(s)
)
s
(
G
O
–
W(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
55
Transmitancja operatorowa
układu otwartego,
otrzymanego poprzez przerwanie pętli sprzężenia
zwrotnego wynosi:
(s)
(s)G
G
W(s)
Y(s)
G(s)
R
0
=
=
Przedstawiając tę transmitancję w postaci ilorazu
wielomianów zmiennej s, otrzymamy
N(s)
M(s)
G(s)
=
(s)
N
(s)
M
G(s)
G(s)
(s)
(s)G
G
(s)
(s)G
G
G(s)
Z
Z
R
R
+
=
+
=
1
1
0
0
przy czym N(s)=0 jest
równaniem charaktery-
styczne
n-tego stopnia układu otwartego.
Transmitancja układu zamkniętego wynosi:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
56
lub po uwzględnieniu wyrażenia
otrzymujemy
Równanie charakterystyczne układu zamkniętego
jest również stopnia n.
(s)
N
(s)
M
G(s)
=
M(s)
(s)
N
(s)
M
G(s)
+
=
0
=
+
=
M(s)
N(s)
(s)
N
Z
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
57
Wnioskujemy zatem, że równanie charakterystyczne N
z
(s)
ma te same miejsca zerowe co wyrażenie w mianowniku
transmitancji
czyli:
(s)
N
(s)
M
G(s)
G(s)
(s)
(s)G
G
(s)
(s)G
G
(s)
G
Z
Z
R
R
Z
=
+
=
+
=
1
1
0
0
[
]
)
arg
)
arg
)
1
arg
0
0
(j ω
N
∆
(j ω
N
∆
(j ω
G
∆
Z
−
=
+
[
]
[
]
)
arg
)
)
arg
)
1
arg
0
0
(jω
N
∆
(jω
N
(jω
M
∆
(jω
G
∆
Z
Z
−
+
=
+
Przyrost
argumentu
wyrażenia 1+G
0
(j
ω
) przy zmianach
częstości
ω
od 0 do +
∞
wyniesie:
0
<ω<
∞
0
<ω<
∞
0
<ω<
∞
0
<ω<
∞
0
<ω<
∞
0
<ω<
∞
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
58
Rozpatrzmy teraz dwa przypadki:
9
Układ otwarty jest stabilny
Układ zamknięty będzie
stabilny
, jeżeli
2
)
arg
π
n
N(jω
∆
⋅
=
2
)
arg
π
n
(jω
N
∆
Z
⋅
=
Równanie charakterystyczne układu otwartego
posiada wszystkie pierwiastki w lewej
półpłaszczyźnie
s.
Zgodnie z kryterium
Michajłowa
0
<ω<
∞
0
<ω<
∞
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
59
Warunek stabilności układu zamkniętego można
wtedy zapisać:
Ten sam warunek odniesiony do charakterystyki
amplitudowo-fazowej
układu otwartego G
0
(j
ω
)
będzie sformułowany następująco:
[
]
0
)
1
arg
=
+ G(jω
∆
Jeżeli otwarty układ regulacji jest stabilny i jego
charakterystyka amplitudowo-fazowa G
0
(j
ω
) dla
pulsacji 0
<ω< ∞
nie obejmuje punktu
(-1,j0) to
wtedy i tylko wtedy po zamknięciu będzie on
również stabilny.
0
<ω<
∞
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
60
Charakterystyki amplitudowo fazowe:
b) układów
niestabilnych
a) układów
stabilnych
)
(
ω
jQ
)
(
ω
P
0
=
ω
0
=
ω
(-1,j0)
a
b
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
61
9
Układ otwarty jest niestabilny.
2
2
)
arg
π
m)
(n
N(jω
∆
−
=
Równanie charakterystyczne układu otwartego ma
(n-m) pierwiastków w
lewej półpłaszczyźnie
zmiennej s oraz m pierwiastków w
prawej
półpłaszczyźnie
. Zgodnie ze wzorem:
0
<ω<
∞
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
62
Warunek stabilności układu zamkniętego można
więc zapisać
Układ zamknięty będzie
stabilny
, jeżeli
2
2
)
arg
π
m)
(n
(jω
N
∆
Z
−
=
[
]
π
m
G(jω
∆
2
2
)
1
arg
⋅
=
+
0
<ω<
∞
0
<ω<
∞
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
63
Warunek
ten odniesiony do charakterystyki
amplitudowo-fazowej układu otwartego
G(j
ω
)
możemy sformułować następująco:
Jeżeli otwarty układ automatyki jest niestabilny i
posiada m pierwiastków w
prawej półpłaszczyźnie
zmiennej s, to po zamknięciu będzie on stabilny,
wtedy i tylko wtedy, gdy charakterystyka
amplitudowo-fazowa
układu
otwartego
dla
częstości zmieniającej się od 0 do
∞
, okrąża
razy m/2 punkt (-1,j0) w kierunku dodatnim
(przeciwnym do ruchu wskazówek zegara).
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
64
Przykład 3
Transmitancja układu otwartego :
1
2
2
2
3
+
+
+
=
s
s
s
K
G(s)
P
Sprawdzić na podstawie kryterium Nuquista, czy
układ zamknięty, którego schemat podano na
rysunku jest stabilny przy K
p
= 10.
E(s)
U(s)
p
K
Y(s)
1
s
2
s
2
s
1
2
3
+
+
+
–
W(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
65
Stosując
kryterium Hurwitza
sprawdzamy czy układ
otwarty jest stabilny:
0
3
1
4
2
1
1
2
2
>
=
−
=
=
∆
Układ otwarty jest
stabilny
.
2)
1)
1 , 2 , 2 , 1 > 0
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
66
Transmitancja widmowa
układu otwartego
2
2
2
2
2
2
2
2
1
1
)
Im
)
ω
(
ω
)
ω
(
)
ω
(
K
G(jω
P
−
+
−
−
=
2
2
2
2
2
2
2
2
1
2
1
)
Re
)
ω
(
ω
)
ω
(
)
ω
(
K
G(jω
P
−
+
−
−
=
2
2
2
2
2
2
2
2
1
1
)
Im
)
ω
(
ω
)
ω
(
)
ω
(
K
G(jω
P
−
+
−
−
=
stąd
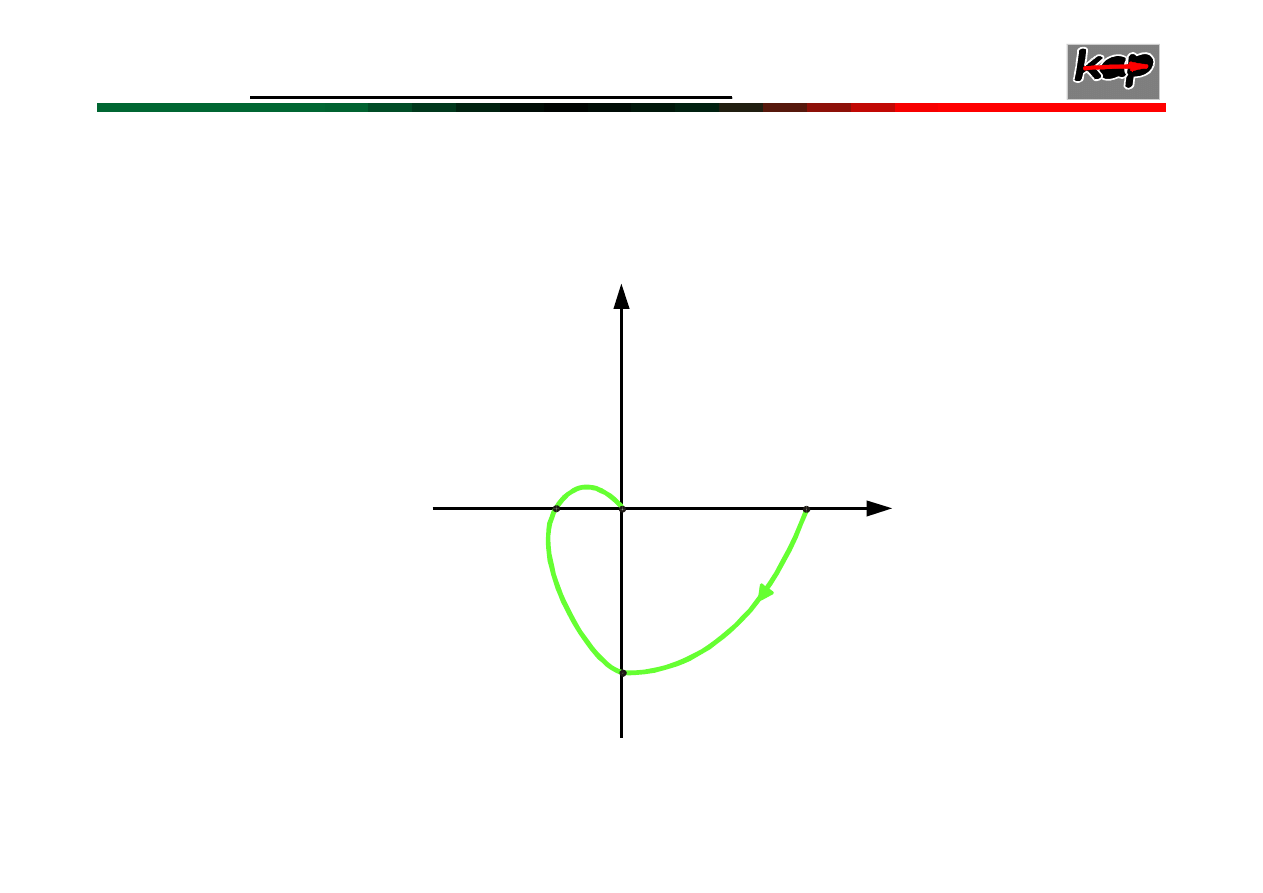
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
67
Im
Re
Po podstawieniu K
p
= 10 wykreślono poniżej
charakterystykę amplitudowo-fazową.
-3,3
-9,45
ω=
8
ω=
10
ω=0
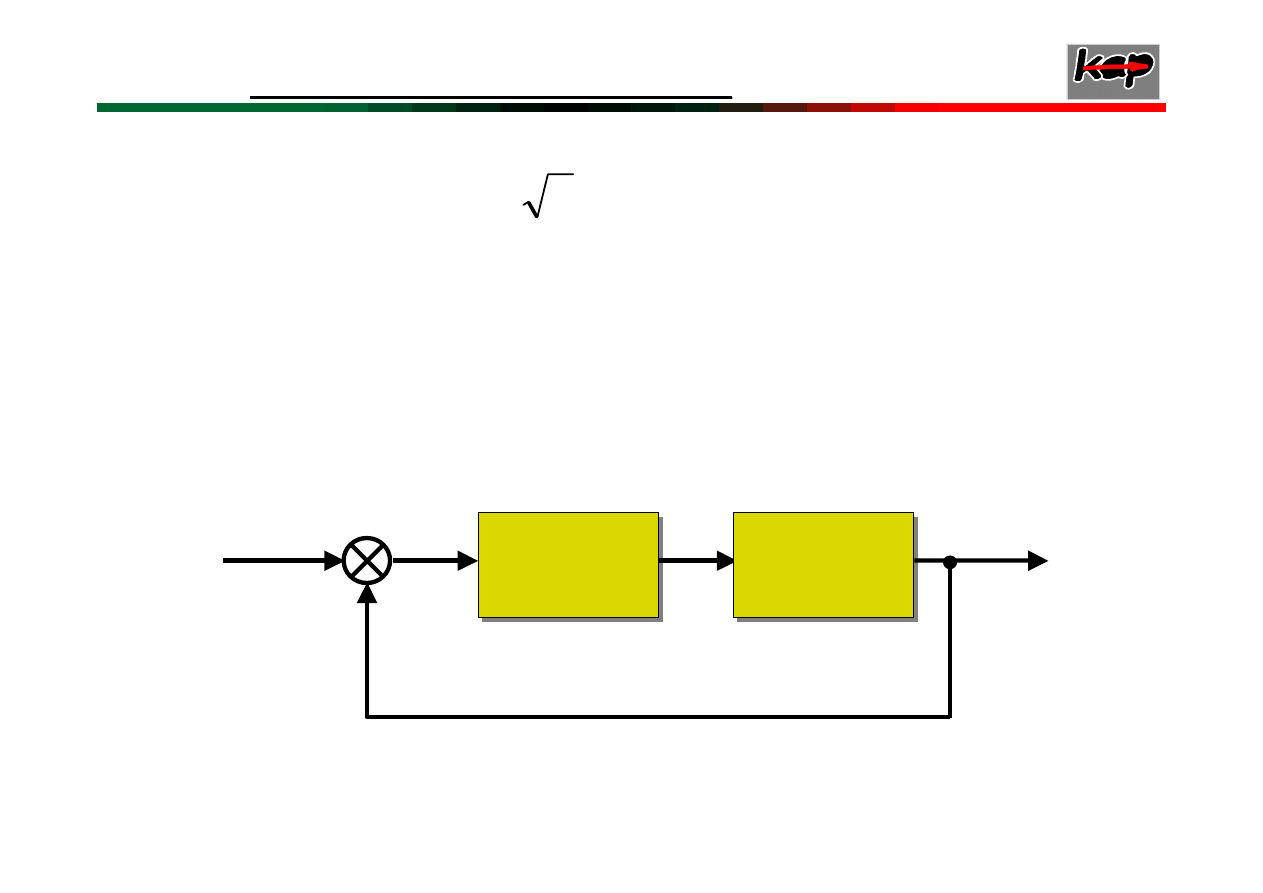
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
68
Wykres G(j
ω
) przecina oś rzeczywistą przy
częstości
w punkcie (-3.3,j0) i w
związku z tym obejmuje punkt (-1,j0). Układ
zamknięty będzie więc niestabilny.
2
=
p
ω
Jedną z zalet
kryterium Nyquista
jest, iż można
je stosować
dla układów zamkniętych
zawierających elementy opóźniające
Schemat blokowy układu zamkniętego z elementem
opóźniającym
τ
−s
e
Y(s)
)
s
(
G
–
W(s)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
69
Transmitancja widmowa
układu otwartego
ma postać
Moduł
transmitancji widmowej
Kąt przesunięcia fazowego
gdzie: |G
otw
(j
ω
)| i |
ϕ
otw
(j
ω
)| są modułem i fazą
układu otwartego bez opóźnienia.
ωτ)
j
ωτ
(jω
G
e
(jω
G
(jω
G
jω
otw
sin
)(cos
)
)
−
=
=
−
τ
)
sin
cos
)
)
2
2
(jω
G
ω
ωτ
(jω
G
(jω
G
otw
=
+
=
τ
ωτ
(ω
ωτ
ωτ
arctg
(ω
(ω
otw
otw
−
=
−
=
)
cos
sin
)
)
ϕ
ϕ
ϕ
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
70
Dla pewnej częstości
ω
x
, dla której |G(j
ω
x
)|=1
istnieje krytyczna stała czasowa opóźnienia
τ
kr
taka, że:
czyli
Wtedy wykres przechodzi przez punkt (-1,j0) a
układ zamknięty znajduje się
na granicy
stabilności.
π
τ
ω
)
(ω
kr
x
x
otw
−
=
−
ϕ
x
x
otw
kr
ω
π
)
(ω
τ
+
=
ϕ
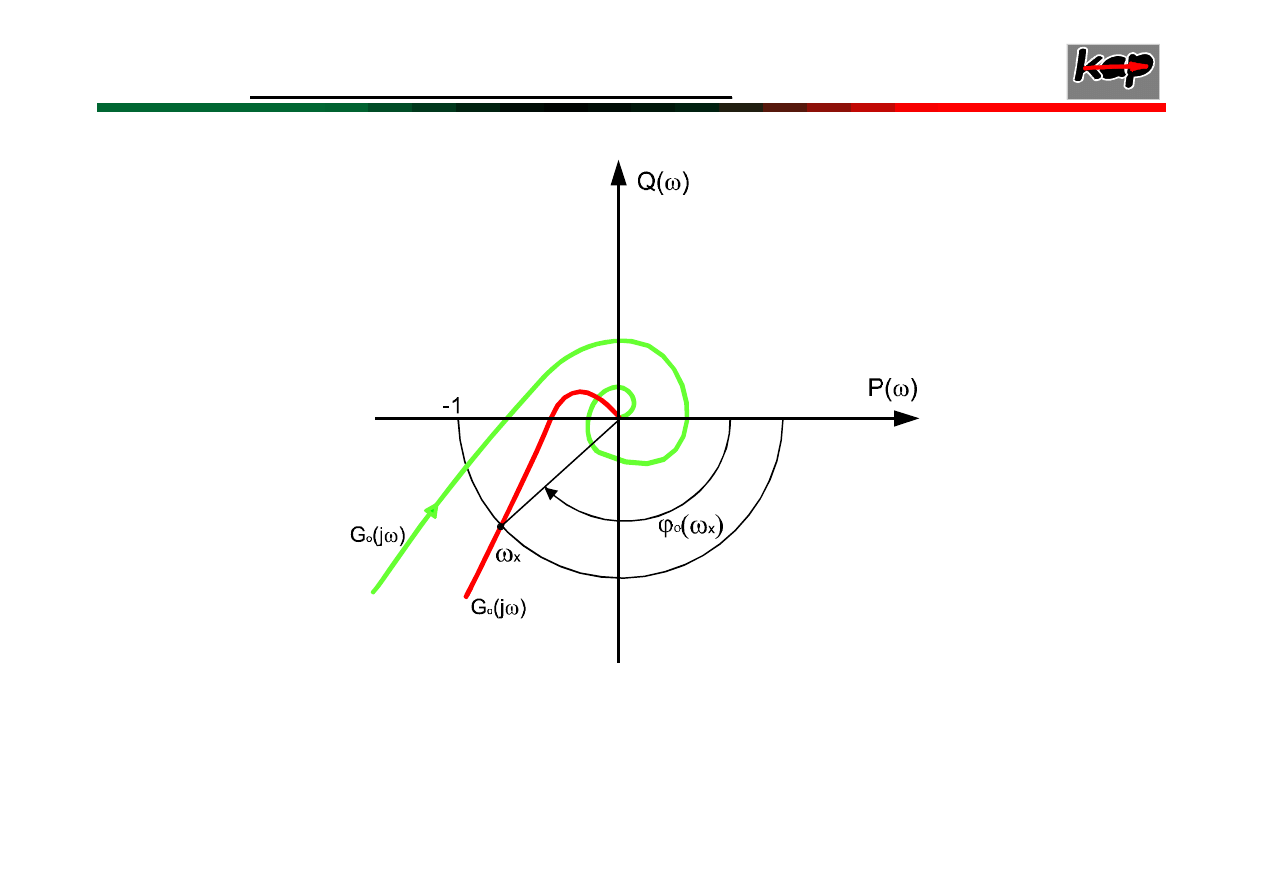
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
71
Wpływ elementu opóźniającego na przebieg
charakterystyki amplitudowo-fazowej układu otwartego
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
72
Logarytmiczne kryterium stabilności
Z kryterium Nyquista
wynika, że moduł
transmitancji widmowej układu otwartego dla
częstości
ω
x
, dla której argument tej transmitancji
jest równy
−π
, powinien być mniejszy od jedności.
Wtedy bowiem charakterystyka amplitudowo-
fazowa nie obejmuje punktu (-1,j0).
Zapas stabilności
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
73
Otrzymujemy zatem warunki:
oraz
Warunek |G(j
ω
x
)|
<
1 w skali logarytmicznej przyjmie
postać
1
)
<
G(jω
-π
)
G(jω
x
=
arg
0
lg
20
<
=
)
G(jω
)
(ω
L
x
x
m
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
74
Na podstawie przedstawionych zależności można
sformułować
kryterium Nyquista
oparte na
charakterystykach logarytmicznych :
Jeśli
układ otwarty
jest
stabilny
, a jego
charakterystyka amplitudowa logarytmiczna
przecina oś 0 dB przy częstości mniejszej od
częstości przecięcia osi
−π
przez charakterystykę
fazową, to układ zamknięty jest
stabilny
.
W przeciwnym razie układ zamknięty jest
niestabilny
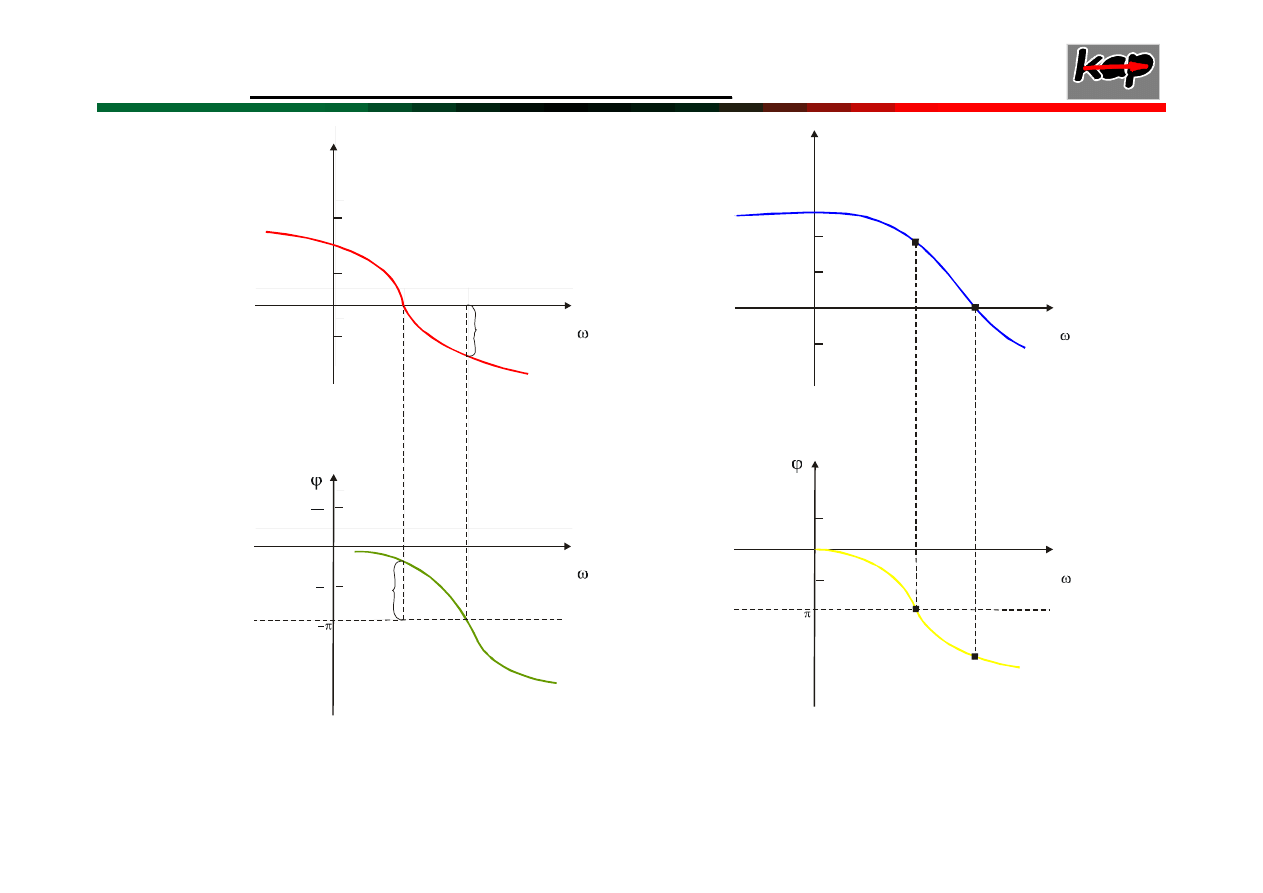
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
75
Charakterystyki logarytmiczne: a) układu
stabilnego
b) układu
niestabilnego
Lm G
dB
Lg
0
0
Lg
0
ϕ
∆
m
L
∆
π
2
1
π
2
1
−
X
ω
a)
Lm G
dB
Lg
0
Lg
0
π
2
1
π
2
1
−
b)
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
76
Na podstawie przebiegu charakterystyk
logarytmicznych można również określić tzw.
„
zapas stabilności
”. Jest to pewien margines
bezpieczeństwa, dający projektantowi układu
regulacji pewność, że układ pozostanie stabilny,
pomimo pewnych zmian jego parametrów
Wyróżnia się przy tym dwa rodzaje zapasu
stabilności:
9
zapas modułu:
9
zapas fazy:
0
m
∆L
0
ϕ
∆
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
77
Zapas modułu
zwany też zapasem wzmocnienia
określa wartość, o którą może być zwiększone
wzmocnienie układu otwartego aby układ znalazł
się na
granicy stabilności
Zapas fazy
określa wartość zmiany argumentu
transmitancji widmowej przy stałym wzmocnieniu,
które spowodowałoby że układ zamknięty
znalazłby się na
granicy stabilności
)
lg
20
0
G(jω
∆L
m
−
=
π
∆
−
=
0
ϕ
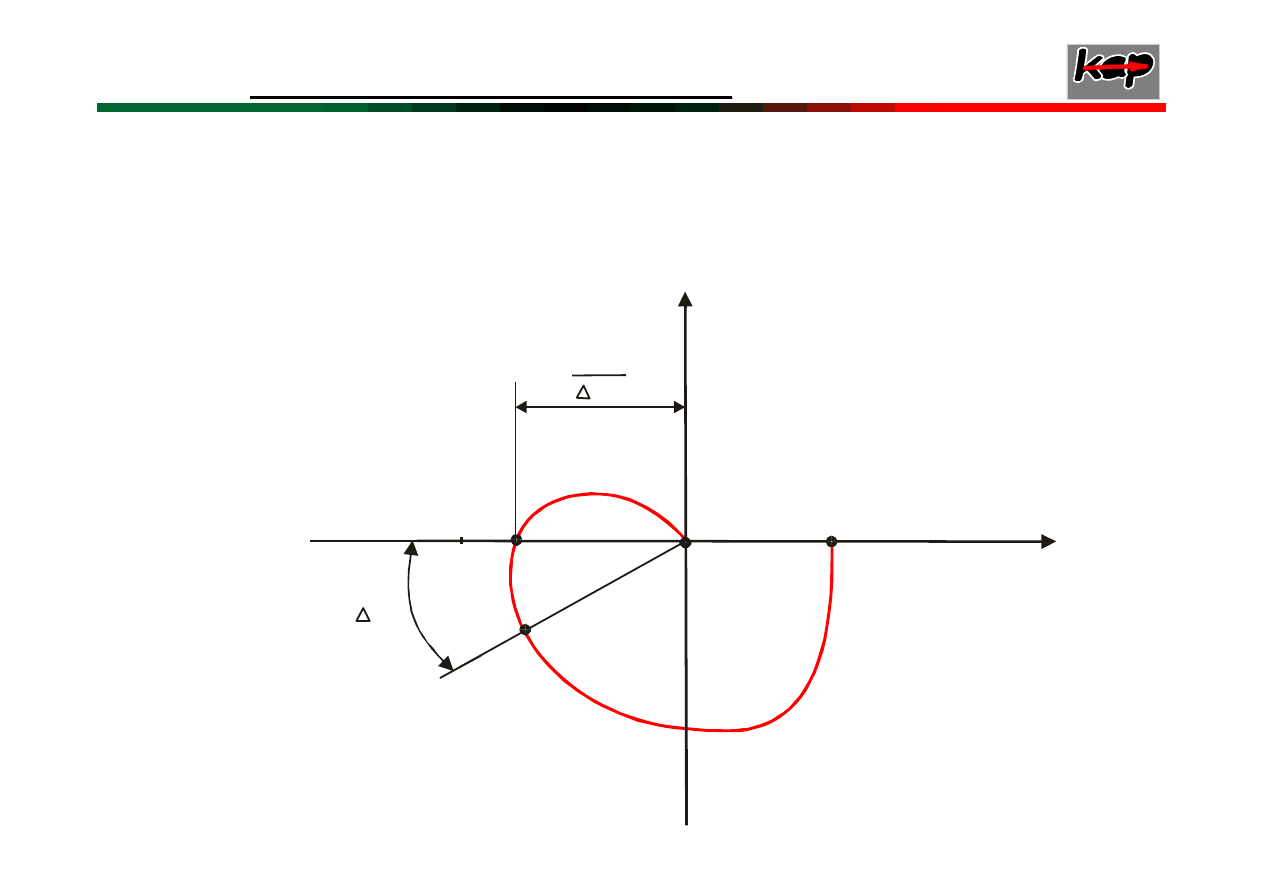
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
78
Zapas stabilności
można również określić na
podstawie charakterystyki amplitudowo-fazowej
układu otwartego
Im
Re
8
ω=
ω=0
ο
-1
ω
x
ϕ
K
1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Temat wykładu: Stabilność liniowych stacjonarnych układów sterowania
Temat wykładu:
Temat wykładu:
Stabilność liniowych stacjonarnych układów sterowania
Stabilność liniowych stacjonarnych układów sterowania
Podstawy Automatyki
Podstawy Automatyki
79
Zapas modułu
można wyznaczyć
W tym przypadku
miarą zapasu stabilności
układu jest oddalenie charakterystyki amplitudowo-
fazowej od punktu krytycznego (-1,j0).
)
1
G(jω
∆K
=
π
−
=
ϕ
Wyszukiwarka
Podobne podstrony:
07 Stabilność liniowych stacjonarnych układów sterowania
Politechnika Białostocka 07 Realizacja pneumatycznych układów sterowania z przekaźnikami czasowymi
Wykład 6 Stabilność liniowych układów automatyki (2013)
Politechnika Białostocka 07 Realizacja pneumatycznych układów sterowania z przekaźnikami czasowymi
Wykład 6 Stabilność liniowych układów automatyki (2013)
sprawozdanie 6 ?danie elektronicznych układów sterowania
Żołnierka, teoria systemów, METODY OPISU CIĄGŁYCH LINIOWYCH JEDNOMIAROWYCH OBIEKTÓW STEROWANIA (2)
Obliczanie układów sterowanych prądowo i napięciowo
14 Eksploatowanie układów sterowania, sygnalizacji i łączności
Politechnika Białostocka 06 Realizacja pneumatycznych układów sterowania z licznikiem zdarzeń
07 Stabilnoscid 6780
Diagnozowanie układów sterowania silnikami w samochodach Lanos cz 1 pdf
39 Badanie układów sterowania z regulatorami nieciągłymi
Elektornika teoria Stabilizatory liniowe
Synteza sekwencyjnych układów sterowania logicznego sprawozdanie
Politechnika Białostocka 05 Realizacja pneumatycznych układów sterowania sekwencyjnego
04 Stosowanie układów sterowania i regulacji
14 Eksploatowanie układów sterowania, sygnalizacji i łącznościid 15402
więcej podobnych podstron