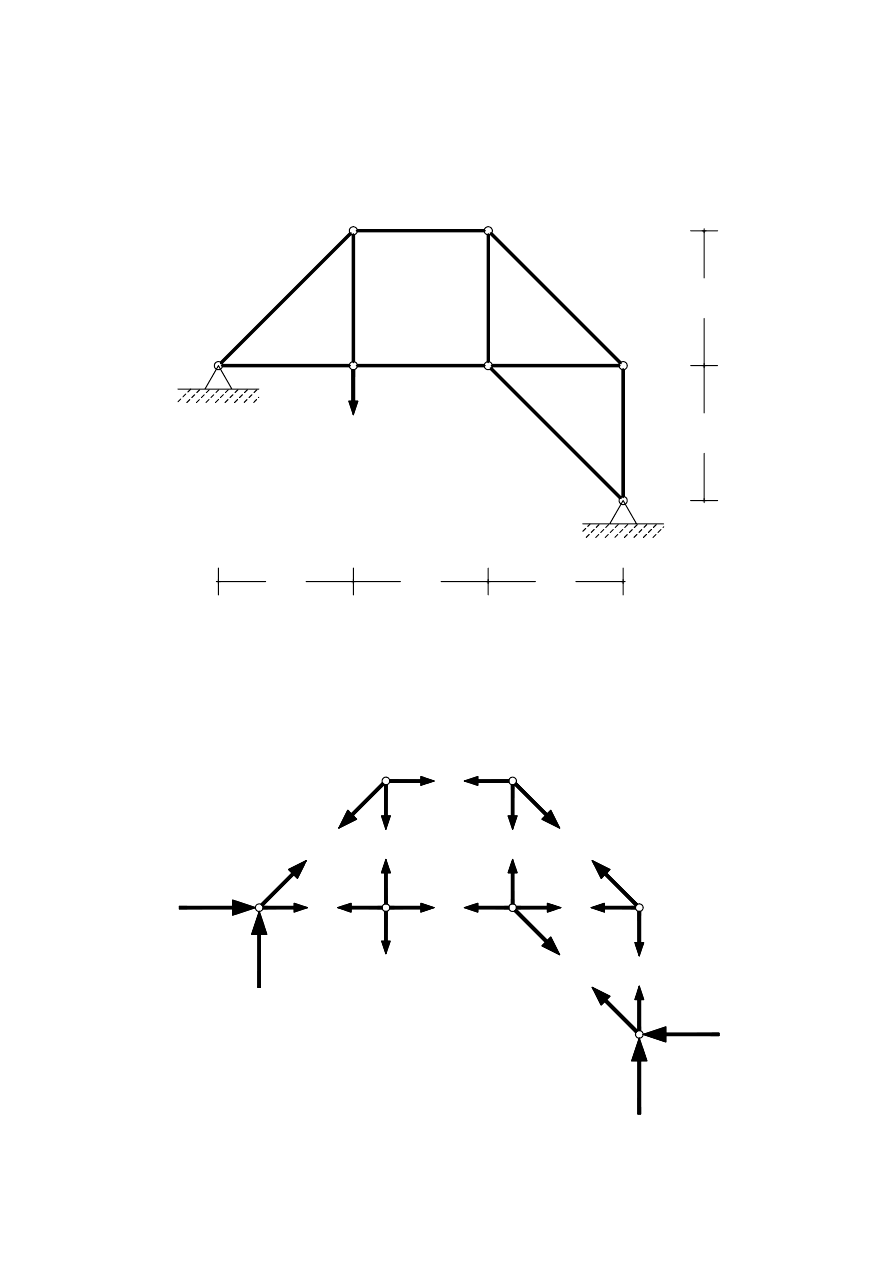
Przykład 1.3. Kratownica płaska
Czy pokazana na rysunku płaska kratownica jest statycznie wyznaczalna?
a
a
a
a
a
P
7
6
5
4
3
2
1
7
6
5
4
3
2
1
Rozwiązanie: Zgodnie z definicją układu statycznie wyznaczalnego warunki równowagi
powinny wystarczyć do jednoznacznego wyznaczenia reakcji podpór i sił przekrojowych w
rozpatrywanym układzie. W przypadku kratownicy jako warunki równowagi możemy przyjąć
równania równowagi węzłów kratownicy.
4
R
3
R
2
R
1
R
10
9
8
7
6
5
4
3
2
1
S
S
S
S
S
S
S
S
S
S
10
9
8
7
6
5
4
3
2
1
S
S
S
S
S
S
S
S
S
S
P
Wtedy niewiadomymi będą reakcje podporowe R
1
,...R
4
oraz siły normalne S
1
,... S
10
.
Warunkiem koniecznym statycznej wyznaczalności jest zgodność liczby równań równowagi z
liczbą niewiadomych, czyli dla rozpatrywanej kratownicy płaskiej
5
4
3
2
1
2 w = p + r
gdzie:
w – liczba węzłów,
p – liczba prętów,
r – liczba reakcji.
W naszym przypadku mamy
w = 7;
p = 10;
r = 4
a zatem warunek konieczny statycznej wyznaczalności jest spełniony. Z teorii układów
algebraicznych równań liniowych wiadomo, że warunkiem dostatecznym istnienia
jednoznacznego rozwiązania jest, aby wyznacznik główny układu równań był niezerowy.
Warunek ten jest niewygodny do sprawdzenia. Prościej jest spróbować rozwiązać zagadnienie
równowagi układu dla przykładowego obciążenia.
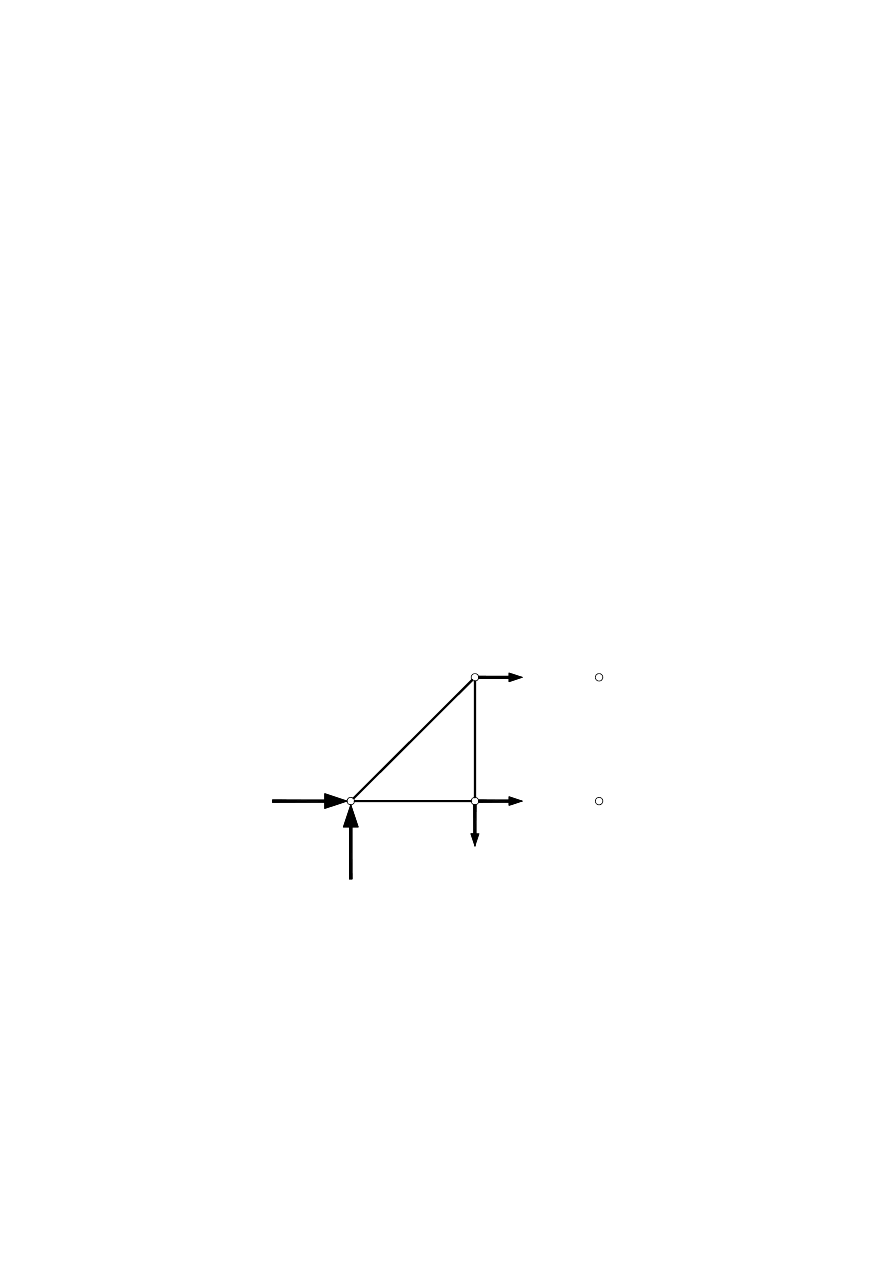
Rozpocznijmy analizę od warunków równowagi pokazanej części kratownicy
3
S
1
S
2
R
1
R
P
0
=
∑
y
F
;
P
R
=
⇒
1
.
Z równowagi całej kratownicy wnioskujemy
0
=
∑
y
F
; 0
3
=
⇒
;
R
0
1
=
∑ M
;
P
R
−
=
⇒
;
4
0
7
=
∑ M
;
P
R
−
=
⇒
2
.
2
4
R
3
R
2
R
1
R
P
7
6
5
4
3
2
1
Przejdźmy teraz do warunków równowagi poszczególnych węzłów wg kolejności
numerowania:
,
=
+
1
2
S
5
2
R
1
0
=
− −
S
4
1
2
S
8
2
0
,
=
−
−
1
2
S
5
2
S
6
0
=
−
−
1
2
S
9
2
R
4
0
,
=
−
1
2
S
8
2
S
10
0
=
− +
S
1
1
2
S
8
2
0
,
=
+ +
1
2
S
9
2
S
10
R
3
0
=
− + +
S
3
S
4
1
2
S
9
2
0
,
=
− −
S
7
1
2
S
8
2
0
=
−
S
1
1
2
S
5
2
0
,
=
−
S
7
1
2
S
9
2
0
=
− +
S
2
S
3
0
,
=
−
S
6
P 0
=
+
+
S
2
1
2
S
5
2
R
2
0
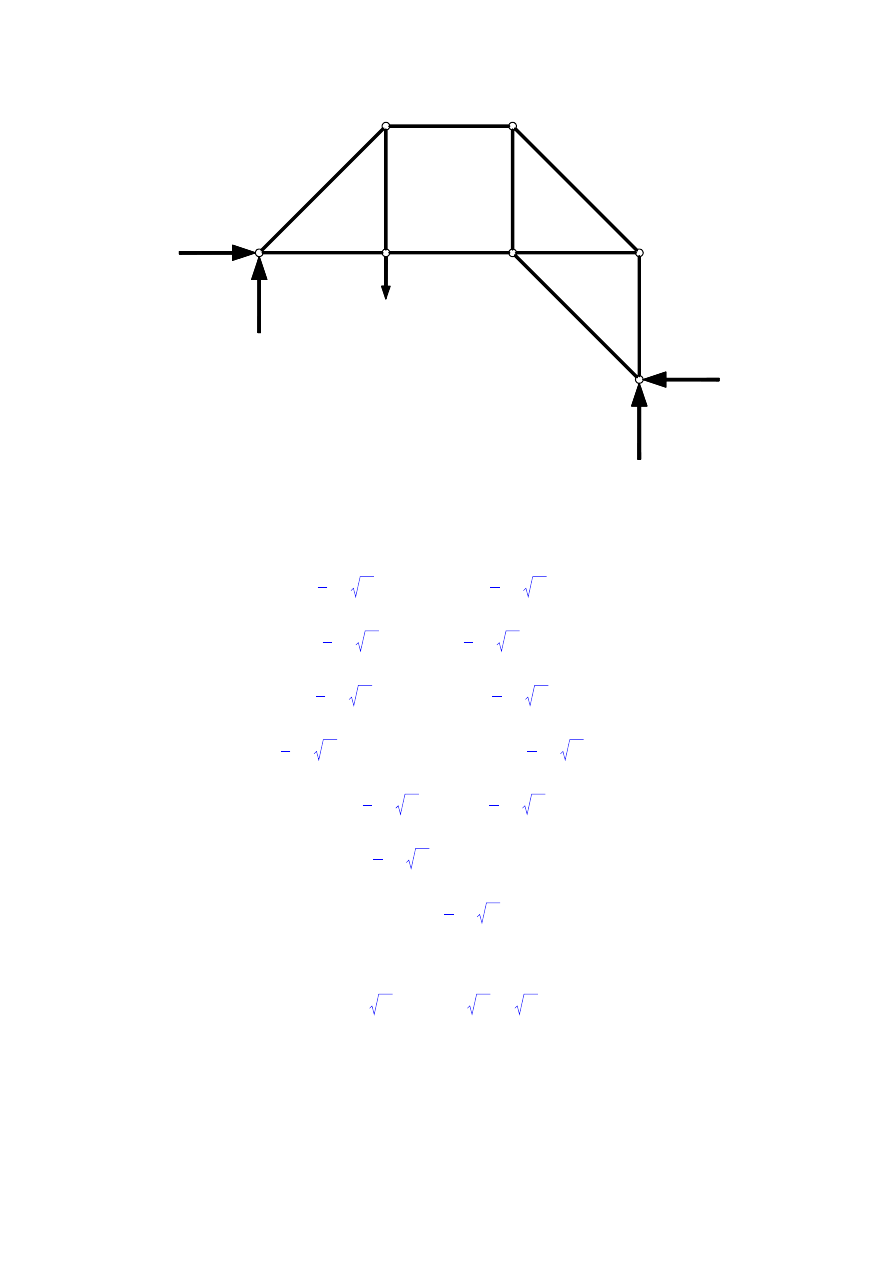
Wynika z nich, że S
1
,... S
10
oraz R
1
,...R
4
wynoszą kolejno:
[
,
,
, ,
, , ,
,
,
, ,
, ,
−P 2 P 2 P P −P
]
2 P P
−P 2 P 2 −P P −P 0 −P
Zatem kratownica jest statycznie wyznaczalna.
3
Document Outline
Wyszukiwarka
Podobne podstrony:
Mechanika Techniczna I Skrypt 4 1 6 Kratownica płaska
Mechanika Techniczna I Skrypt 4 1 9 Kratownica płaska
Mechanika Techniczna I Skrypt 4 1 4 Kratownica płaska
Mechanika Techniczna I Skrypt 4 1 7 Kratownica płaska
Mechanika Techniczna I Skrypt 4 3 5 Kratownica złożona
Mechanika Techniczna I Skrypt 4 1 10 Kratownica płaska
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Mechanika Techniczna I Skrypt 1 2 1 Okreslenie i rodz
Mechanika Techniczna I Skrypt 5 03
Mechanika Techniczna I Skrypt 3 14
Mechanika Techniczna I Skrypt 5 02
Mechanika Techniczna I Skrypt 3 7
Mechanika Techniczna I Skrypt 3 1
Mechanika Techniczna I Skrypt przyklady do rozwiazania id 291
Mechanika Techniczna I Skrypt 2 8 Prety, układy pretów
Mechanika Techniczna I Skrypt 5 10
Mechanika Techniczna I Skrypt 5 06
Mechanika Techniczna I Skrypt 3 12
więcej podobnych podstron