
Łukasz Skrodzki, gr. I6Y3S1
1/10
Warszawa, dn. 22.01.2008r.
Wojskowa Akademia Techniczna
im. Jarosława Dąbrowskiego
w Warszawie
Laboratorium przedmiotu
'Wprowadzenie do automatyki'
zajęcia 7
Temat:”
Badanie stabilności liniowego układu regulacji
”
Słuchacz
:
Łukasz Skrodzki
grupa
:
I6Y3S1
rok akademicki
:
2007/2008
semsetr:
III
prowadzący
:
mgr inż. Małgorzata Rudnicka – Schmidt
data przeprowadzenia ćwiczenia
: 22.01.2008r.
Łukasz Skrodzki, gr. I6Y3S1
2/10
I. Zadanie
1.
Układ statyczny
Transmitancja układu otwartego ma postać:
)
1
s
T
)(
1
s
T
)(
1
s
T
(
k
)
s
(
H
3
2
1
+
+
+
=
1.1
Należy zbudować model badanego układu, jako wymuszenie
zastosować generator skoku jednostkowego.
1.2
Zmieniając wartość k współczynnika wzmocnienia układu otwartego należy
znaleźć współczynnik wzmocnienia granicznego k
gr
. Jest to wartość
wzmocnienia, przy której w odpowiedzi skokowej układu zamkniętego
występują niegasnące drgania.
1.3
Zmieniając k od ok. 0.1k
gr
do k
gr
zmierzyć:
- wartość ustaloną sygnału wyjściowego y
ust
,
- wartość maksymalną sygnału wyjściowego y
max
,
- czas regulacji t
r
.
1.4
Dla wartości k z punktu 1.3 wyznaczyć bieguny transmitancji
układu zamkniętego.
2.
Układ astatyczny
Transmitancja układu otwartego ma postać:
s
)
1
s
T
)(
1
s
T
(
k
)
s
(
H
2
1
+
+
=
2.1 Należy zbudować model badanego układu. Jako wymuszenie
zastosować generator skoku jednostkowego.
2.2
Zmieniając wartość współczynnika wzmocnienia k układu otwartego należy
znaleźć współczynnik wzmocnienia granicznego k
gr
.
2.3
Zmieniając k od ok. 0.1k
gr
do k
gr
zmierzyć:
- czas regulacji t
r
,
- wartość maksymalną sygnału wyjściowego y
max
.
2.4 Zmienić wymuszenie na liniowo rosnące. Zmierzyć uchyb
ustalony dla wartości k z punktu 2.3.
Uwaga: W celu uzyskania wymuszenia liniowo rosnącego należy zastosować
blok Ramp z biblioteki Sources. Aby zmierzyć uchyb ustalony, blok Out
lub To Workspace należy podłączyć za węzeł sumacyjny.
2.5
Dla wartości k z punktu 2.3 wyznaczyć bieguny transmitancji
układu zamkniętego.
Łukasz Skrodzki, gr. I6Y3S1
3/10
II. Metod rozwiązania
1)Układ statyczny:
Moje dane to:
T1 = 0.25
T2 = 0.40
T3 = 0.75
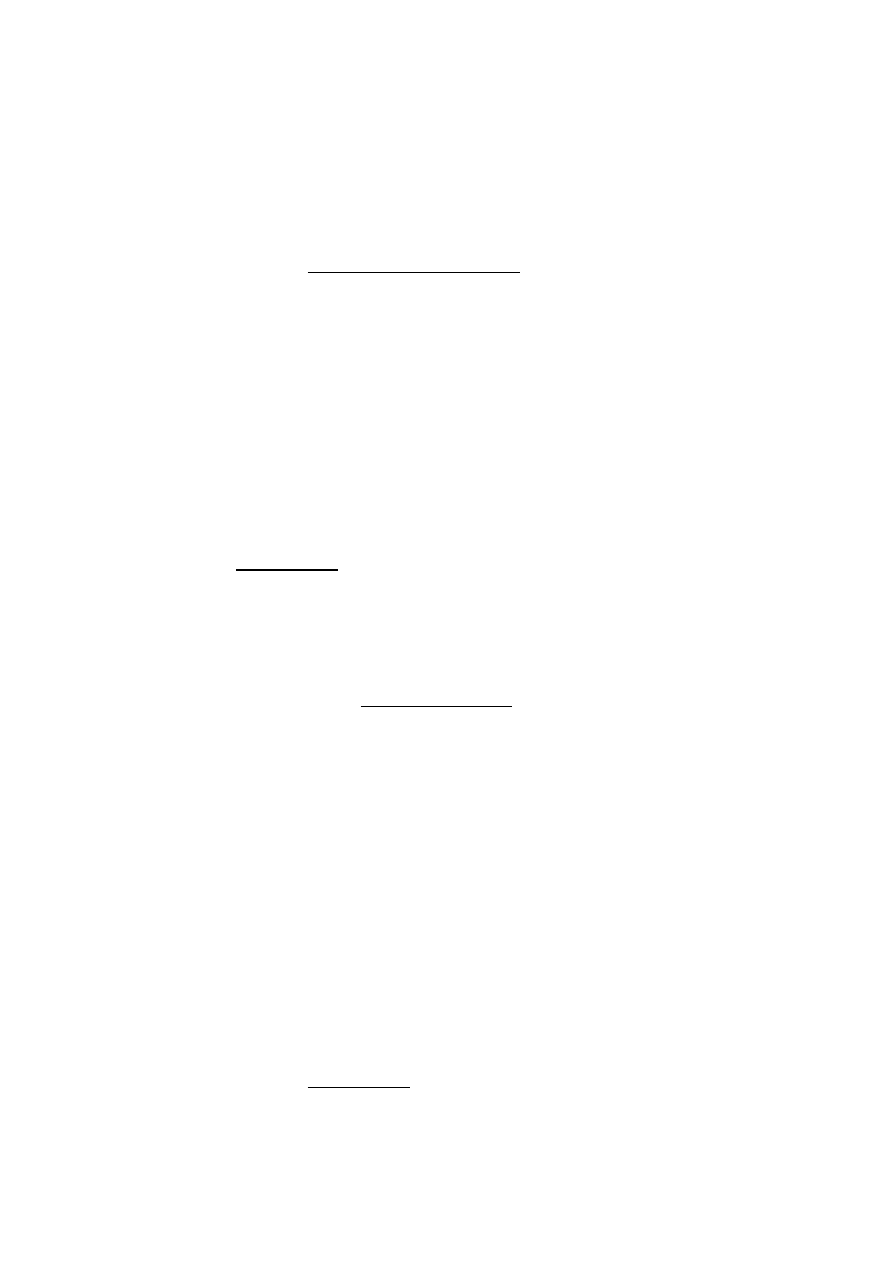
Schemat badanego układu:
Dla przedstawionego układu i wymienionych powyżej danych graniczny współczynnik
wzmocnienia ma wartość
k
gr
=
9.98
.
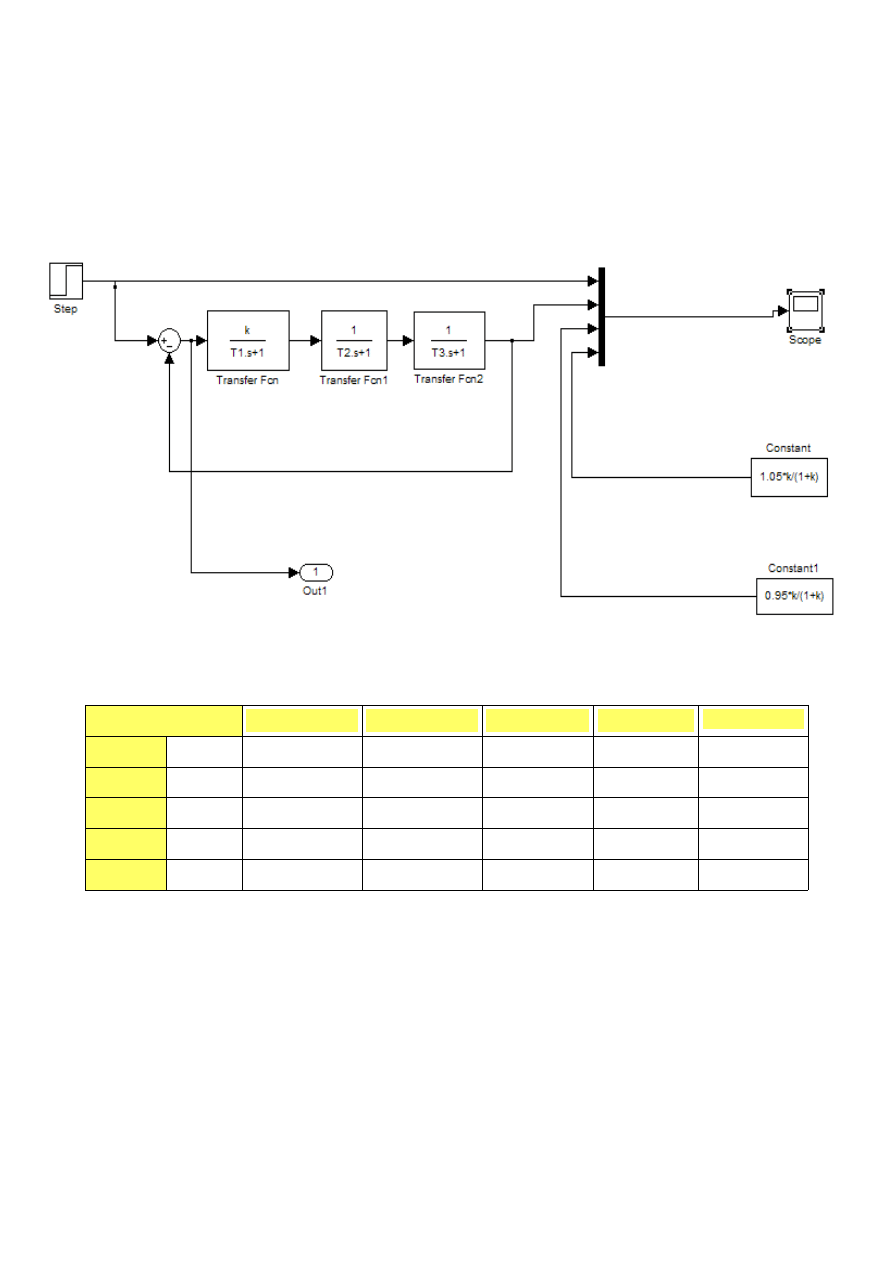
Dla k = 0.5 k
gr
= 4.99 wykres odpowiedzi skokowej przedstawia się następująco:
k
y
ust
y
max
e
ust
t
r
0.1
k
gr
0,998
0.50
0,5495
0,50
2,53
0,099
0.2
k
gr
1,996
0.6682
0,8246
0,318
3,076
0,234
0.5
k
gr
4,99
0.8351
1,2896
0,1649
5,8449
0,544
0.7
k
gr
6,896
0.8752
1,4892
0,1248
10,196
0,702
0.8
k
gr
7,984
0.8897
1,5677
0,1103
15,991
0,7535
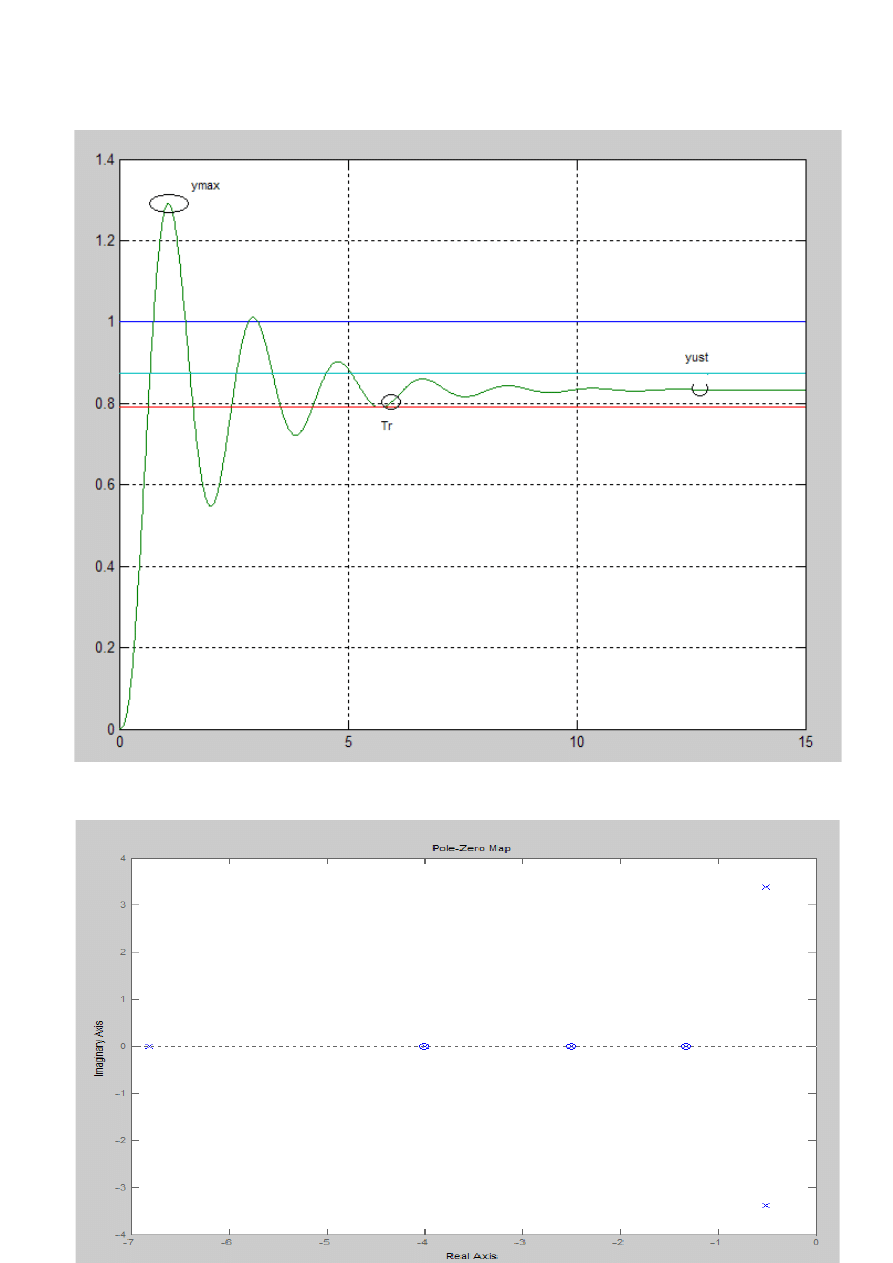
Bieguny transmitancji układu zamkniętego to:
P1 = -6.8140
P2 = -0.5097 + 3.3854i
P3 = -0.5097 - 3.3854i
P4 = -4.0000
P5 = -2.5000
P6 = -1.3333
Łukasz Skrodzki, gr. I6Y3S1
4/10
Wykres położenia biegunów transmitancji:
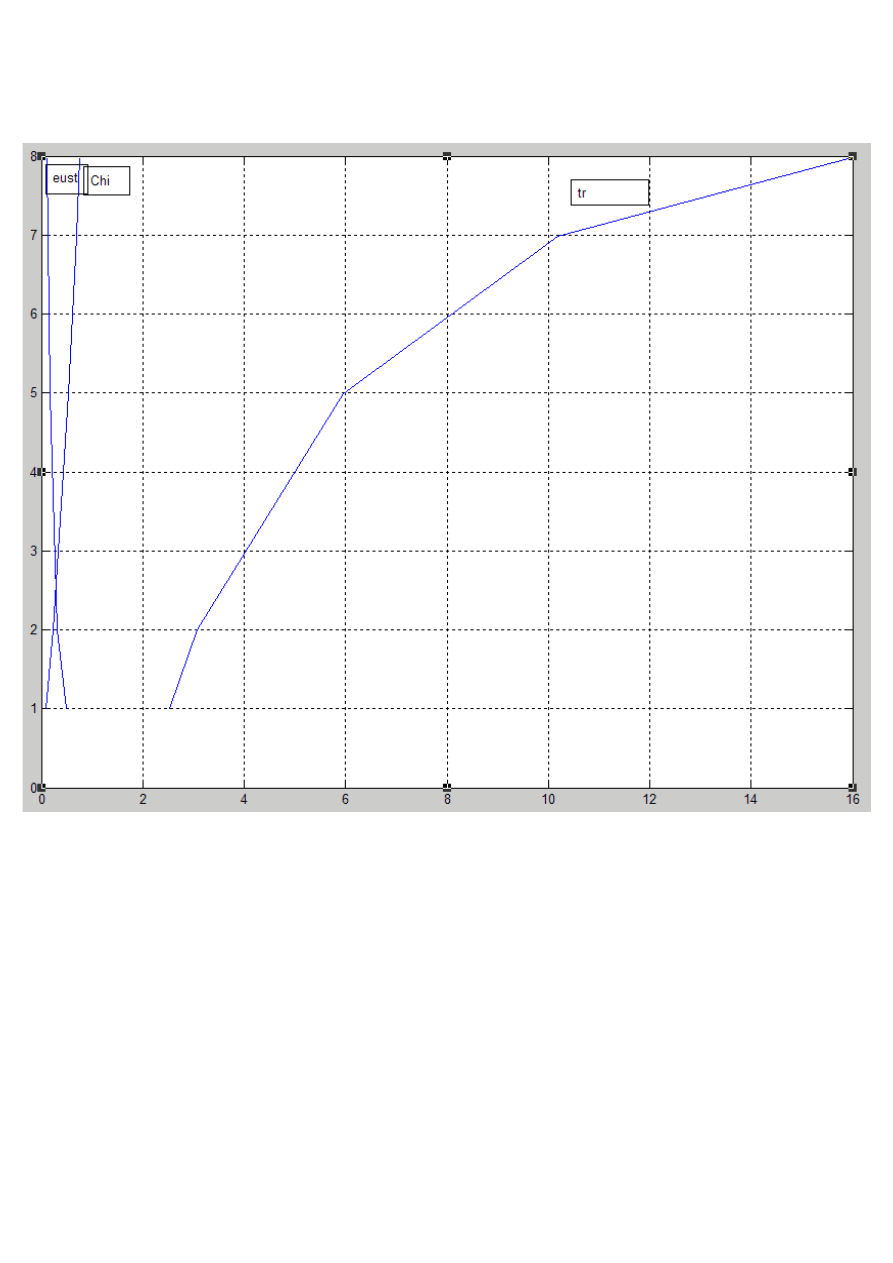
Zależności na wspólnym wykresie:
Łukasz Skrodzki, gr. I6Y3S1
5/10
Łukasz Skrodzki, gr. I6Y3S1
6/10
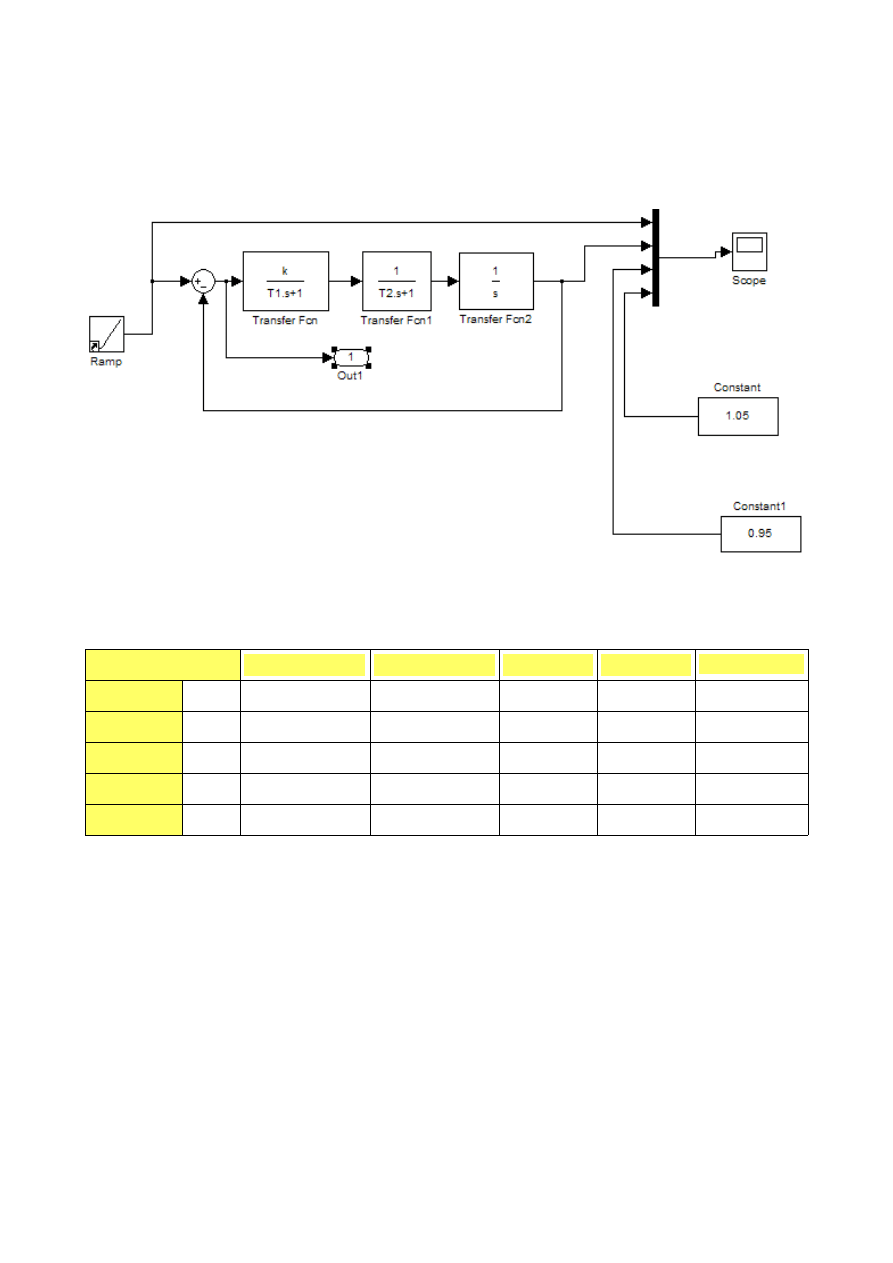
2)Układ astatyczny:
Moje dane:
T1 = 0.05
T2 = 1.5
Schemat układu:
Graniczny współczynnik wzmocnienia dla tego układu ma wartość 20.71
k
y
max
y
ust
e
ust
t
r
0.1 k
gr
2,07
1,4345
0.5613
0.4387
9.2512
0.6087
0.3 k
gr
6,21
1,6979
0.7931
0.2069
12.8687
0.5389
0.5 k
gr
10,35
1,8214
0.8625
0.1375
18.3525
0.5265
0.7 k
gr
14,49
1,8944
0.9064
0.0936
30.89
0.5215
0.8 k
gr
16,56
1,9200
0.9211
0.0789
47.9455
0.5200
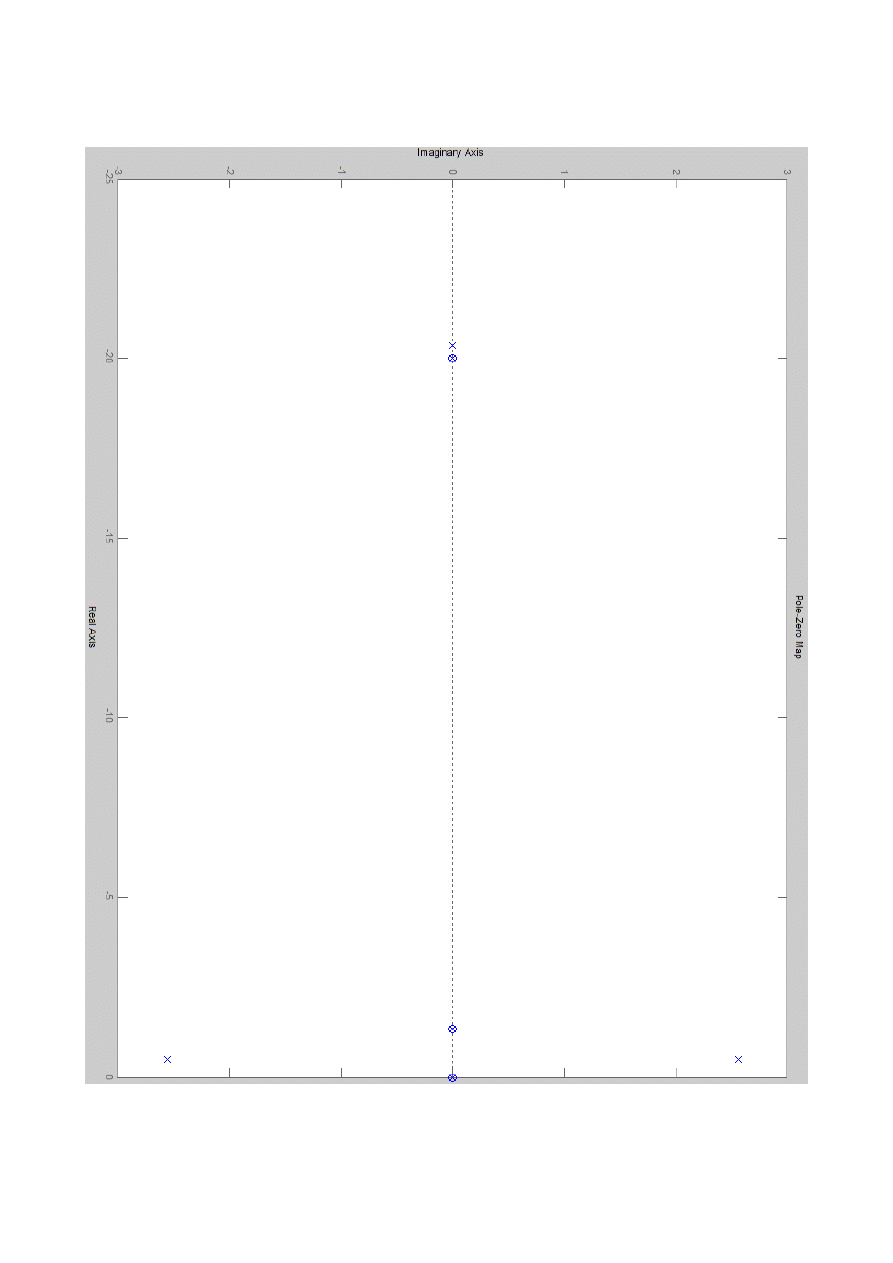
Bieguny tej transmitancji to:
P1 = 0
P2 = -20.3564
P3 = -20.0000
P4 = -0.4885 + 2.5575i
P5 = -0.4885 - 2.5575i
P6 = -1.3333
Łukasz Skrodzki, gr. I6Y3S1
7/10
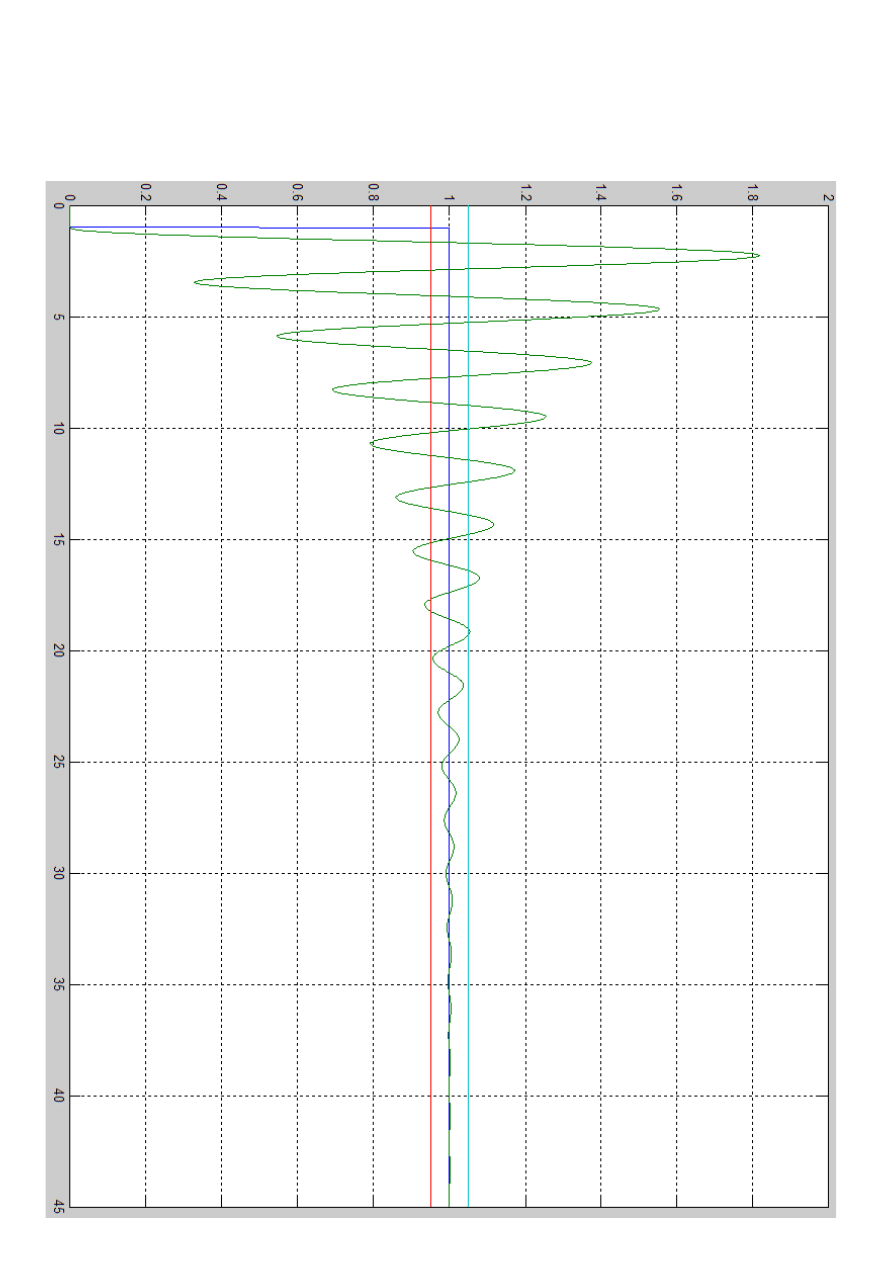
Wykres odpowiedzi skokowej układu dla k = 0.5 *
k
gr
Łukasz Skrodzki, gr. I6Y3S1
8/10
Położenie biegunów transmitancji:
Łukasz Skrodzki, gr. I6Y3S1
9/10
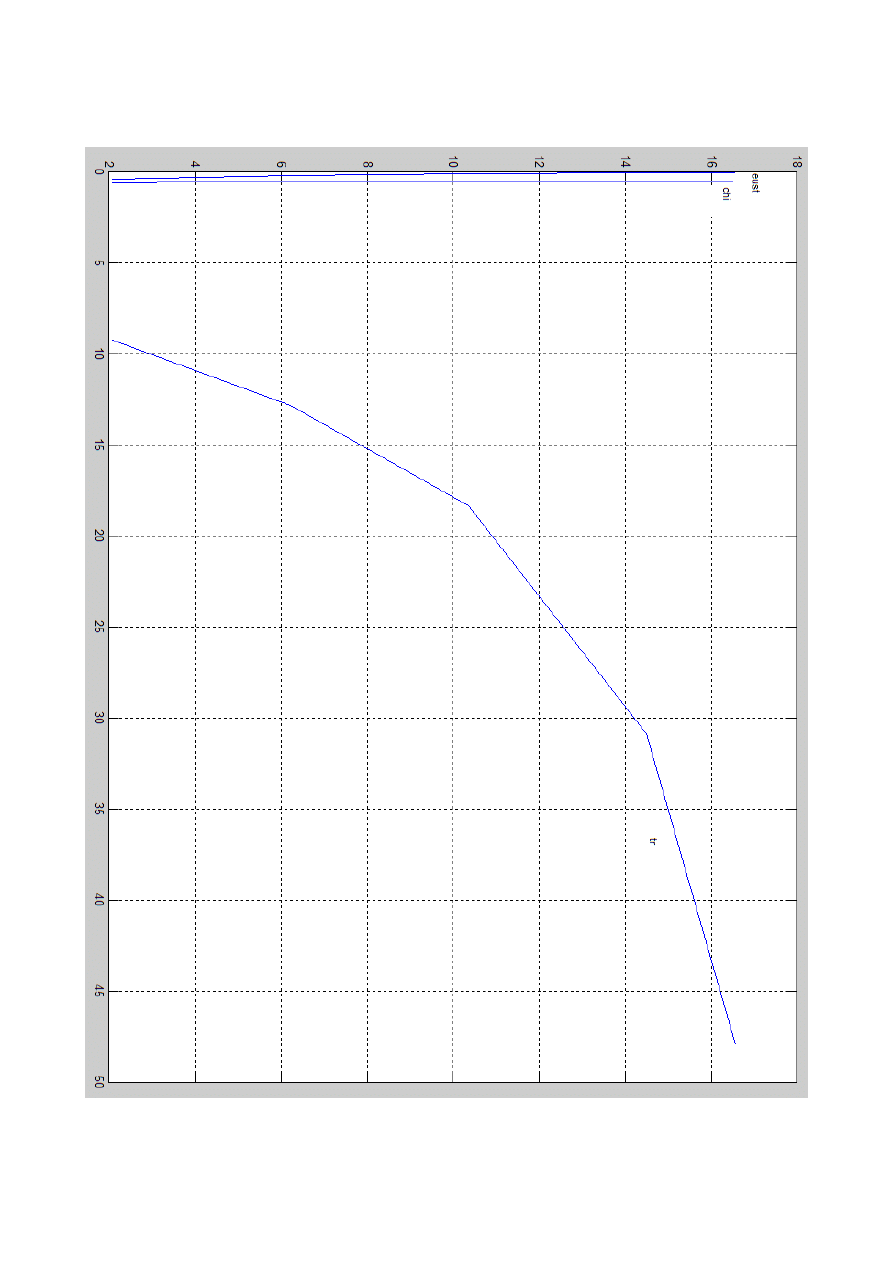
Wykres zależności od k:

Łukasz Skrodzki, gr. I6Y3S1
10/10
Wnioski:
Widać, że dla k równego k granicznemu układ zachowuje się stabilnie i oscyluje
wciąż utrzymuje się wokół tej samej wielkości. Przy zmniejszaniu k w stosunku do k
granicznego wpółczynnik przeregulowania zmniejsza się dążąc do ½. Natomiast w miarę
zmniejszania k uchyb ustalony rośnie, przy jednoczesnym zwiększaniu się wielkości czasu
regulacji układu.
Wyszukiwarka
Podobne podstrony:
WdA Lab2 Lukasz Skrodzki
WdA lab5 Lukasz Skrodzki
WdA Lab4 Lukasz Skrodzki
WdA Lab3 Lukasz Skrodzki
WdA lab6 Lukasz Skrodzki
WdA Lab1 Lukasz Skrodzki
WdA lab8 Lukasz Skrodzki
WDA LAB7
wda lab7
cpp z ccfd, pocpp lab7
Zestawienie pow stare, od Łukasza
EGZAMIN skrodzka
Lab7
PE LAB7 generatory
lab7 3 6
dsp lab7 id 144062 Nieznany
Metody godne Łukaszenki
WYKAZ WSPÓŁRZĘDNYCH po scaleniu i podziale, od Łukasza
Rachunkowosc - wyklad - dr V.Skrodzka - 27.09.2008r, rachunkowość, rachunkowość
więcej podobnych podstron