Projekt „Informatyka – inwestycją w przyszłość”
współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Biuro Projektu:
Politechnika Radomska im. Kazimierza Pułaskiego
26-600 Radom, ul. Chrobrego 27, pok. nr 44, tel. 48 361 78 50, 48 361 70 81
www.zamawiane.pr.radom.pl; e-mail: informatyka@pr.radom.pl
Zajęcia wyrównawcze z fizyki -Teoria
dr M.Gzik-Szumiata
Zestaw 2. Kinematyka,cz.1. Przemieszczenie, prędkość, przyspieszenie, droga. Ruch
jednostajny prostoliniowy, jednostajnie przyspieszony i jednostajnie opóźniony. Składanie
ruchów: Prędkość względna, prędkość wypadkowa.
Pod pojęciem ruchu rozumiemy zmiany wzajemnego położenia jednych ciał względem drugich wraz z
upływem czasu. Położenie określamy względem układu odniesienia tzn. wybranego ciała lub
układu ciał.
W matematycznym opisie zjawiska ruchu położenie ciała określamy w układzie współrzędnych dwu-
lub trójwymiarowym, w przypadku ruchu jednowymiarowego (ruch wzdłuż linii prostej) podajemy
jedynie współrzędną x.
Prędkość definiujemy jako zmianę położenia ciała w jednostce czasu.
t
x
v
sr
prędkość średnia
dt
dx
v
ch
prędkość chwilowa
Ruch jednostajny prostoliniowy.
.
const
v
t
v
x
x
o
wzór określający położenie ciała w danej chwili czasu t.
Ruch jednostajnie przyspieszony
Przyspieszeniem nazywamy tempo zmian prędkości.
Jeżeli ciało przyspiesza lub hamuje i jego prędkość zmienia się jednostajnie z czasem to
przyspieszenie a tego ciała jest stałe
.
const
a
, a ruch nazywamy jednostajnie zmiennym.
Projekt „Informatyka – inwestycją w przyszłość”
współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Biuro Projektu:
Politechnika Radomska im. Kazimierza Pułaskiego
26-600 Radom, ul. Chrobrego 27, pok. nr 44, tel. 48 361 78 50, 48 361 70 81
www.zamawiane.pr.radom.pl; e-mail: informatyka@pr.radom.pl
t
v
v
t
v
a
o
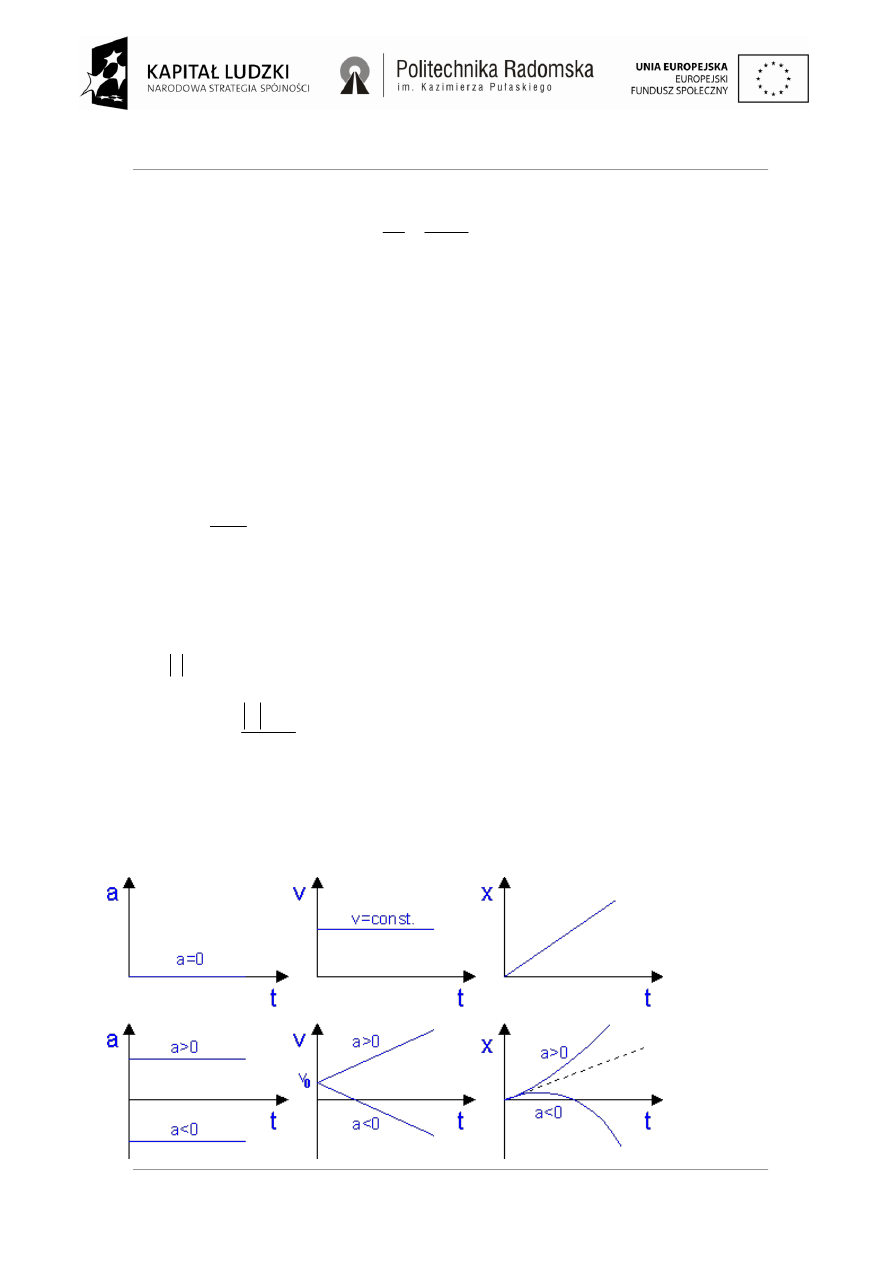
Gdy prędkość rośnie (a > 0) to ruch nazywamy
jednostajnie przyspieszonym
, a gdy prędkość maleje
(a < 0) to ruch określamy jako
jednostajnie opóźniony
.
W ruchu jednostajnie przyspieszonym:
t
a
v
v
o
2
2
t
a
t
v
x
x
o
o
W ruchu jednostajnie opóźnionym:
t
a
v
v
o
2
2
t
a
t
v
x
x
o
o
Jako podsumowanie, pokazane jest graficzne przedstawienie ruchu prostoliniowego jednostajnego i
jednostajnie zmiennego w postaci wykresów x(t), v(t) oraz a(t).
Projekt „Informatyka – inwestycją w przyszłość”
współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Biuro Projektu:
Politechnika Radomska im. Kazimierza Pułaskiego
26-600 Radom, ul. Chrobrego 27, pok. nr 44, tel. 48 361 78 50, 48 361 70 81
www.zamawiane.pr.radom.pl; e-mail: informatyka@pr.radom.pl
Gdy przyspieszenie ciała nie jest stałe, to ruch taki nazywamy niejednostajnie zmiennym, a
przyspieszenie obliczamy wtedy ze wzoru:
dt
dv
a
, czyli przyspieszenie jest pochodną
prędkości względem czasu.
Prędkość wypadkowa jest to wektorowa suma wszystkich prędkości z jakimi
równocześnie porusza się ciało:
2
1
v
v
v
wyp
[Przykładowo v
1
to prędkość własna samolotu, mierzona względem powietrza, v
2
to prędkość wiatru,
a v
wyp
to wypadkowa prędkość samolotu względem Ziemi.]
Wartość prędkości wypadkowej oblicza się zgodnie z regułami dodawania wektorów.
Prędkość względna: Prędkość względna jest to prędkość obiektu mierzona przez obserwatora,
który również jest w ruchu.
2
1
.
v
v
v
wzgl
Przykładowo: Gdy dwa samochody jadą w tych samych kierunkach, to wartość ich prędkości
względnej
jest równa różnicy wartości ich prędkości, gdy dwa samochody jadą w przeciwnych kierunkach, ich
wartość prędkości względnej jest równa sumie wartości ich prędkości.
Wyszukiwarka
Podobne podstrony:
Zestaw 02 id 587899 Nieznany
zestaw29 02, Zestaw 29
zestaw24 02, Zestaw 24
Laboratorium z PO Zestaw 02
2011 10 20 Zestaw 02
zestaw28 02, Zestaw 28
h 02 teoria
zestaw 02
Zestaw 02 InzB id 587902 Nieznany
zestaw23 02, Zestaw 23
ZestawNTP, studia, teoria pola
IP - test (zestaw 02), Studia UMK FiR, Licencjat, II rok - moduł Rachunkowość, Ochrona własności int
02 Teoria prawa - OGÓLNA REFLEKSJA NAD PRAWEM, PRAWO UŁ, IV rok, Teoria i filozofia prawa
MEO teoria, Studia, SiMR, II ROK, III semestr, Metrologia i zamienność, Metrologia, metrola, sciaga+
cw 02 teoria id 121357 Nieznany
Zestaw 02 2 id 587900 Nieznany
Sciągi, ZESTAW 02, POSZERZENIE TORÓW KOLEJOWYCH
fizyka zadania zestaw 02
ZESTAW III - teoria-1, ~FARMACJA, I rok, CHEMIA OGÓLNA I NIEORGANICZNA, Egzamin chemia
więcej podobnych podstron