
Politechnika Poznańska
Wydział Budowy Maszyn i Zarządzania
Instytut Technologii Mechanicznej
Laboratorium Elementów i Układów
Automatyzacji
Sterownik programowalny – wejścia/wyjście binarne
Instrukcja do ćwiczenia

2
OGÓLNE ZASADY BEZPIECZEŃSTWA
PODCZAS WYKONYWANIA ĆWICZEŃ LABORATORYJNYCH
!
Przed przystąpieniem do ćwiczenia należy zapoznać się z instrukcją
dydaktyczną.
!
Dokonać oględzin urządzeń, przyrządów i przewodów używanych podczas
ć
wiczenia. W przypadku zauważenia nieprawidłowości lub uszkodzeń
bezzwłocznie powiadomić prowadzącego.
!
Zabrania się samodzielnego załączania stanowiska bez sprawdzenia połączeń i
wydaniu zgody przez prowadzącego.
!
Zmian parametrów lub konfiguracji stanowiska przy użyciu dostępnych
przełączników
i
potencjometrów
można
dokonywać
po
uprzednim
przeanalizowaniu skutków takich działań.
!
Zmian w konfiguracji obwodów elektrycznych polegających na zmianie
połączeń przewodów lub wymianie przyrządów, należy dokonywać po
uprzednim wyłączeniu zasilania stanowiska.
!
Zabrania się wykonywania przełączeń (przewodów, urządzeń) w układzie
znajdującym się pod napięciem.
!
Przy obsłudze stanowisk, które zawierają elementy zasilane napięciem
elektrycznym wyższym niż napięcie bezpieczne, należy zachować szczególną
ostrożność w celu uniknięcia porażenia prądem elektrycznym.
!
Stosowanie ustawień i procedur innych niż opisane w instrukcji lub zalecone
przez prowadzącego może spowodować nieprzewidziane działanie, a nawet
uszkodzenie stanowiska.
!
Przekroczenie dopuszczalnych parametrów (napięć, prądów) może doprowadzić
do uszkodzenia elementów stanowiska, pożaru lub porażenia prądem.
!
W przypadku nieprawidłowego działania urządzeń lub wystąpienia objawów
uszkodzeń (np. iskrzenie, zapach spalenizny) należy natychmiast wyłączyć
stanowisko i powiadomić prowadzącego.
3
1.
Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową, zasadą działania i sposobem
programowania wejść i wyjść binarnych sterownika programowalnego OMRON
CPM1.
2.
Wstęp teoretyczny
2.1.
Sterownik programowalny OMRON CPM1
Sterownik programowalny (PLC, Programmable Logic Controller) jest
mikrokomputerem przemysłowym, który przyjmuje sygnały wejściowe z
wyłączników i czujników, na podstawie ich stanów wykonuje zadany program i
steruje urządzeniami wyjściowymi. W systemach automatyzacji opartych na
przekaźnikach i układach logicznych program sterujący jest określany poprzez
odpowiedni sposób okablowania. Zastosowanie PLC pozwala na definiowanie
algorytmu sterującego przy pomocy oprogramowania. Instalacja sprzętowa kończy
się na podłączeniu pozostałych elementów automatyzacji do wejść i wyjść
sterownika. Takie rozwiązanie zapewnia „elastyczność” systemu – w przypadku
zmian w procesie sterowania nie jest wymagane czasochłonne i kosztowne
„przerabianie” całej instalacji, wystarczy wprowadzić poprawki do programu
realizowanego przez sterownik.
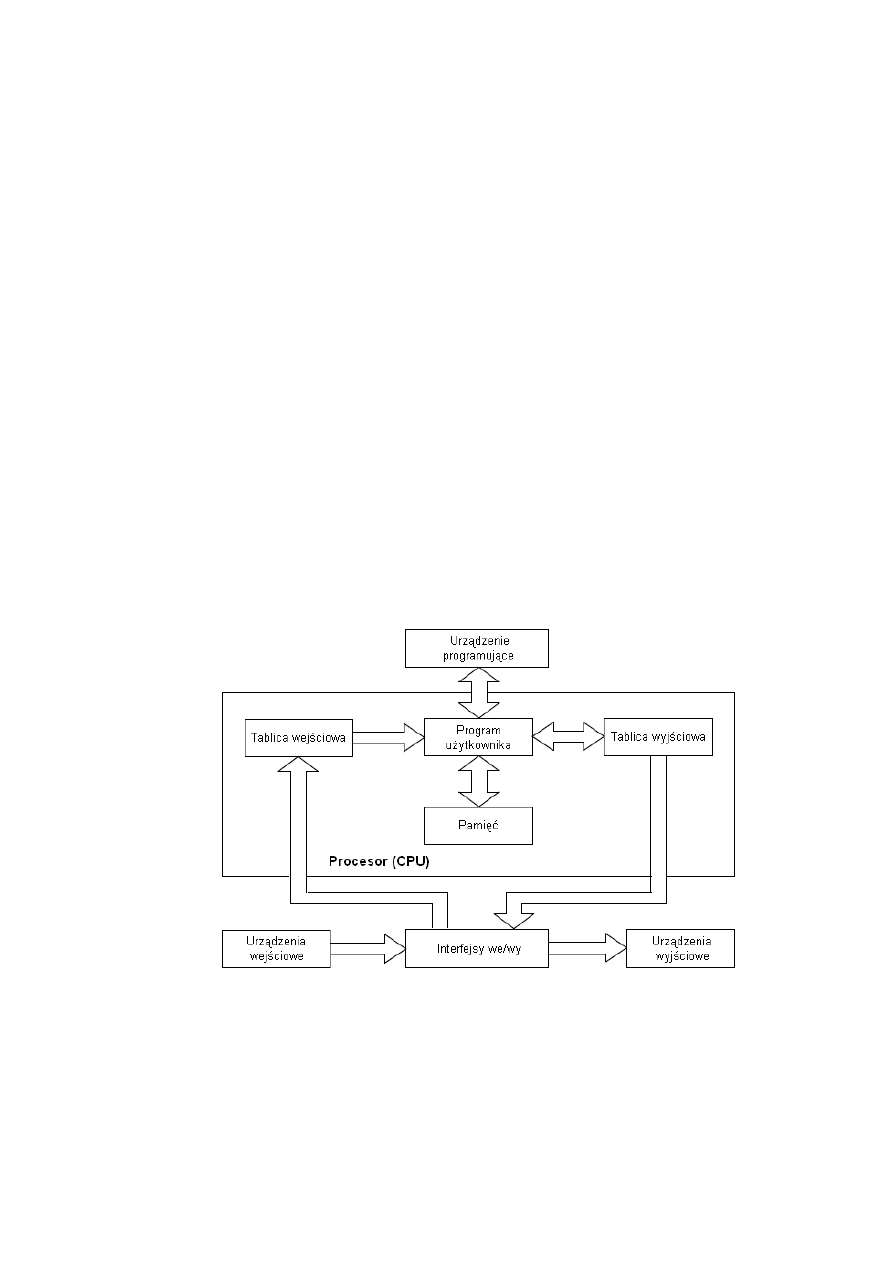
Sterowniki PLC zbudowane są z modułów wejściowych, jednostki centralnej
(CPU), modułów wyjściowych oraz interfejsów zapewniających komunikację z
innymi urządzeniami (Rys. 1).
Rys. 1. Schemat blokowy sterownika PLC
Wejścia PLC akceptują różne sygnały wejściowe, cyfrowe lub analogowe,
pochodzące z zewnętrznych urządzeń (czujników), które są następnie przetwarzane
do postaci sygnałów logicznych, akceptowalnych przez CPU. Procesor podejmuje
decyzje i wykonuje funkcje sterowania bazując na instrukcjach programowych
zawartych w pamięci. Instrukcje programowe określają, co powinien wykonać PLC
przy określonym stanie wejść i w danej sytuacji. Dodatkowy interfejs operatorski
4
Inicjalizacja cyklu
Czytanie stanów
wejść
Wykonanie
programu
użytkownika
Aktualizacja
stanów wyjść
Obsługa urządzeń
zewnętrznych
Wykonanie funkcji
diagnostycznych
(pulpit sterowniczy) umożliwia wyświetlanie informacji o realizowanym procesie
sterowania, pozwala na jego kontrolę i wprowadzanie parametrów.
Sterowniki programowalne są używane w wielu gałęziach przemysłu do
automatyzacji maszyn, urządzeń i linii technologicznych. Są niedrogie, łatwe w
instalacji i proste w obsłudze. Doskonale nadają się do wielu praktycznych
zastosowań. Zbierają one informację o przebiegu procesu przy pomocy różnego
rodzaju
czujników:
wyłączników,
czujników
zbliżeniowych,
układów
pomiarowych, liczników impulsów, przetworników impulsowo obrotowych itp.
Informacje te są wykorzystywane do sterowania procesem. Ich wartości mogą być
monitorowane, rejestrowane i przesyłane do innych urządzeń poprzez łącza
komunikacyjne. PLC realizują również funkcje diagnostyki programowej i
sprzętowej.
Elementami
wyjściowymi
sterowników
są
np.:
styczniki,
elektrozawory, falowniki, wskaźniki.
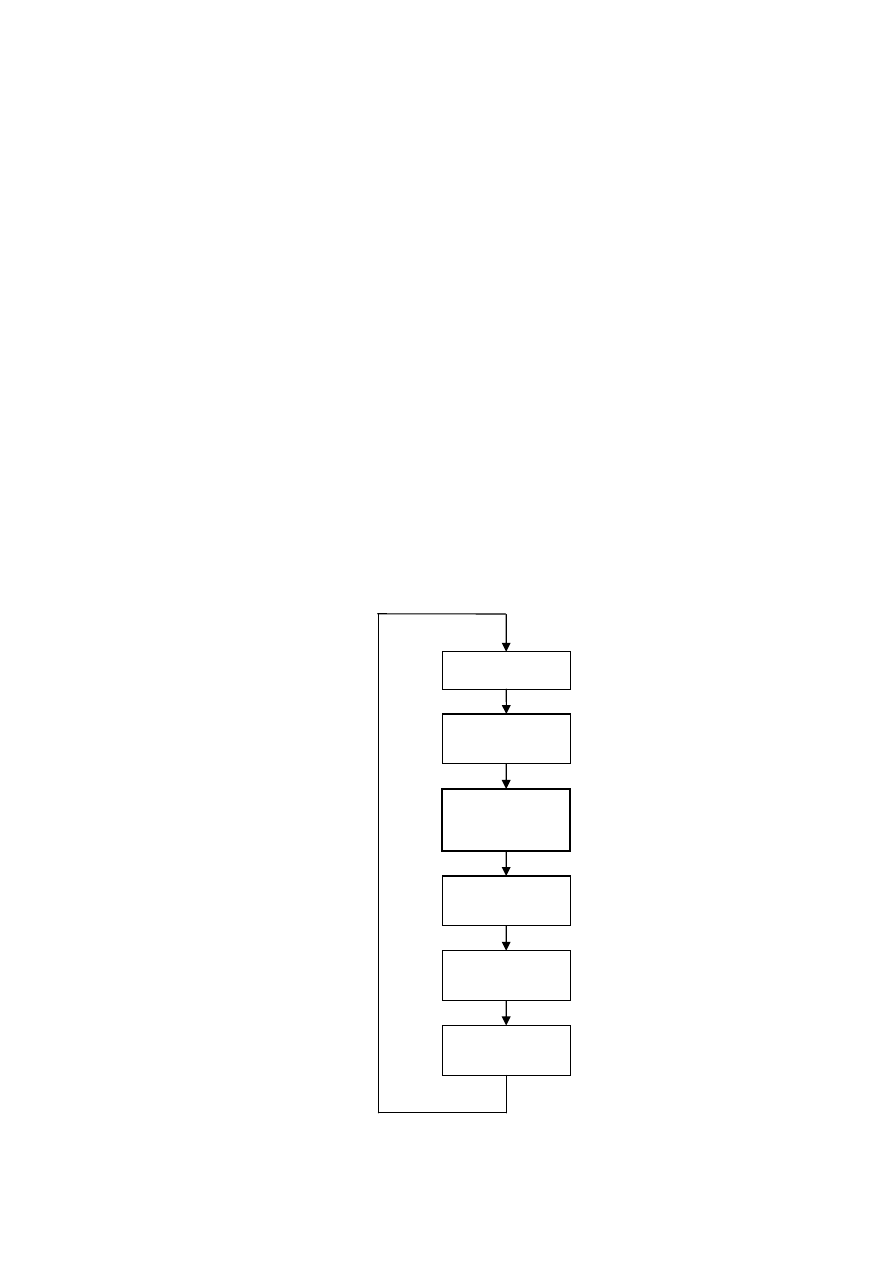
Sterownik pracuje w sposób szeregowo-cykliczny (Rys. 2), tzn. wykonuje
kolejno po sobie pojedyncze rozkazy programu w takiej kolejności, w jakiej są one
zapisane w programie. Na początku każdego cyklu program odczytuje i zapisuje w
pamięci stany wejść sterownika. Po wykonaniu wszystkich rozkazów i określeniu
aktualnego dla danej sytuacji stanu wyjść, sterownik wpisuje do pamięci stany
wyjść, a następnie steruje odpowiednimi wyjściami, włączając bądź wyłączając
podłączone do nich elementy wykonawcze. Niektóre z faz cyklu programowego
mogą
być
w pewnych trybach pracy sterownika pomijane. Czas cyklu wynosi kilka
milisekund, zależy od rozmiaru programu, liczby wejść/wyjść oraz od liczby
niezbędnych procesów komunikacji.
Rys. 2. Praca szeregowo-cykliczna sterownika PLC
5
Rozróżniamy trzy tryby pracy sterownika programowalnego: STOP/PROGRAM,
MONITOR i RUN.
Tryb STOP/PROGRAM jest wykorzystywany do wprowadzania zmian w
oprogramowaniu sterownika. Sterownik jest wtedy zatrzymany (nie wykonuje
programu), jego wyjścia są nieaktywne i pozostają w stanie wyłączonym.
W trybie MONITOR możemy śledzić przebieg programu realizowanego przez
sterownik. Istnieje wtedy możliwość wpływu na wartości sygnałów wejściowych i
wyjściowych, wartości liczników i układów czasowych.
Normalnym trybem pracy sterownika (wykonywania programu) jest RUN. Nie
mamy wtedy możliwości wprowadzania zmian w oprogramowaniu sterownika.
Pamięć sterownika jest podzielona na tzw. obszary robocze w których mieści się
zarówno przetwarzania danych, matematyczne, logiczne, sterujące, systemowe oraz
wymiany danych. Adresy wejść oznaczone są symbolami 000.xx i 001.xx, wyjść
010.xx i 011.xx, a rejestrów DMxxxx, gdzie xx to numer wejścia/wyjścia/obszaru
pamięci. W pamięci zapisywane są w również stany poszczególnych wejść i wyjść
układu, liczników, przekaźników, oraz dane potrzebne do komunikowania się
sterownika z innymi urządzeniami.
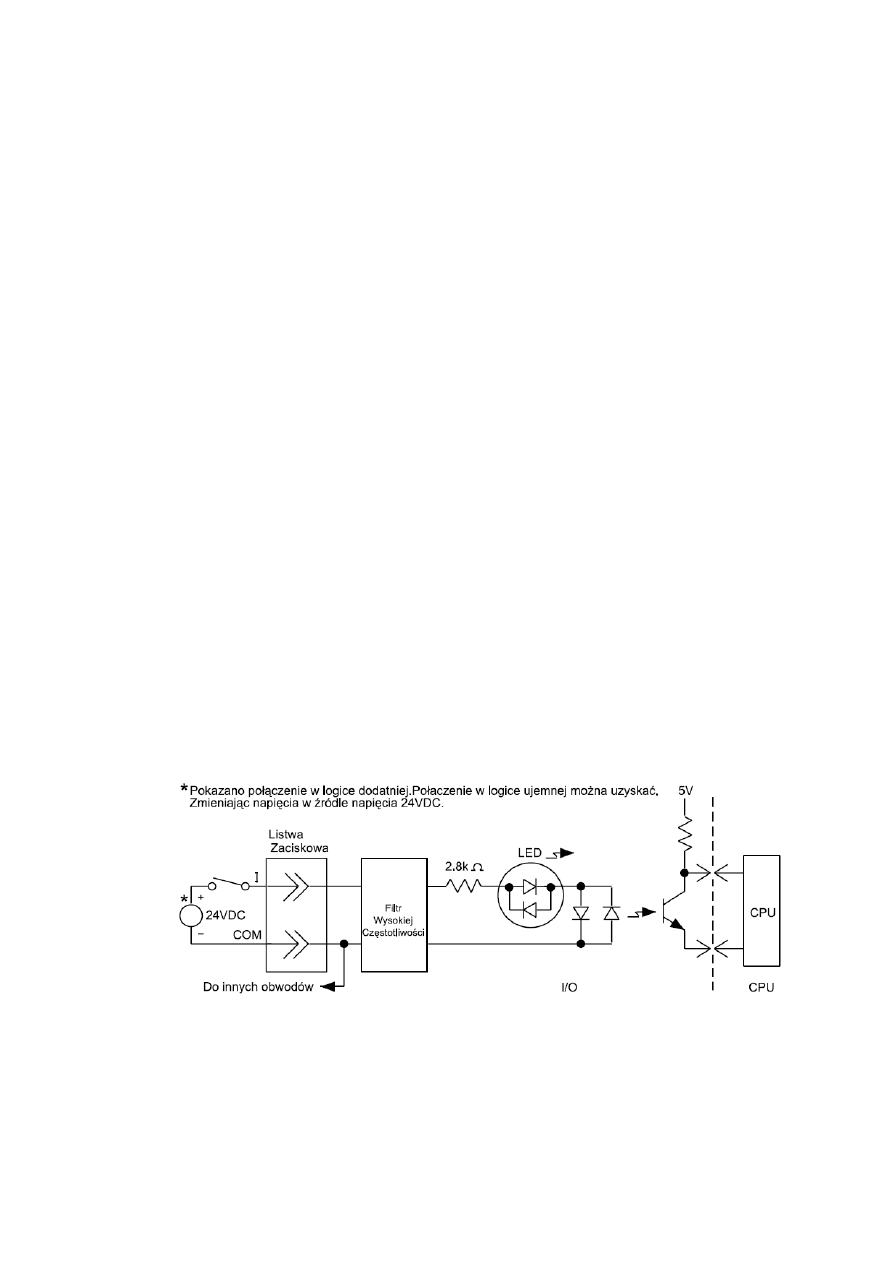
Wejście cyfrowe (dyskretne), może znajdować się w jednym z dwóch stanów:
załączone (ON) lub wyłączone (OFF). Można do niego podłączyć przyciski,
przełączniki dwustanowe, wyłączniki krańcowe lub czujniki zbliżeniowe. Kiedy
przycisk zostaje wciśnięty, napięcie zostaje dołączone do wejścia PLC. Odpowiada
to logicznej jedynce lub stanowi wysokiemu. W stanie wyłączenia dyskretne
wejście odpowiada logicznemu zeru lub stanowi niskiemu. Wejścia sterownika są
izolowane optoelektrycznie od obwodów zewnętrznych przy pomocy transoptorów
(Rys 3). Załączenie wejścia jest sygnalizowane świeceniem diody LED. Wejścia
mogą pracować zarówno w logice dodatniej (ze wspólną masą) lub logice ujemnej
(ze wspólnym plusem zasilania). W programie sterującym symbolem pierwszego
wejścia jest 000.00, drugiego 000.01, itd.
Rys. 3. Schemat elektryczny wejścia dyskretnego PLC
Wyjście cyfrowe może przyjmować dwie wartości: włączone (ON) lub
wyłączone (OFF). Przykładowymi urządzeniami wykonawczymi podłączanymi do
wyjść dyskretnych są styczniki, elektrozawory i wskaźniki. Wyjściami sterownika
są styki przekaźników, normalnie otwarte, izolowane, o maksymalnej obciążalności
styków 2A. Do prawidłowego działania układu wykonawczego konieczne jest
doprowadzenie do styków napięcia z zewnętrznego źródła zasilania. Wyjścia
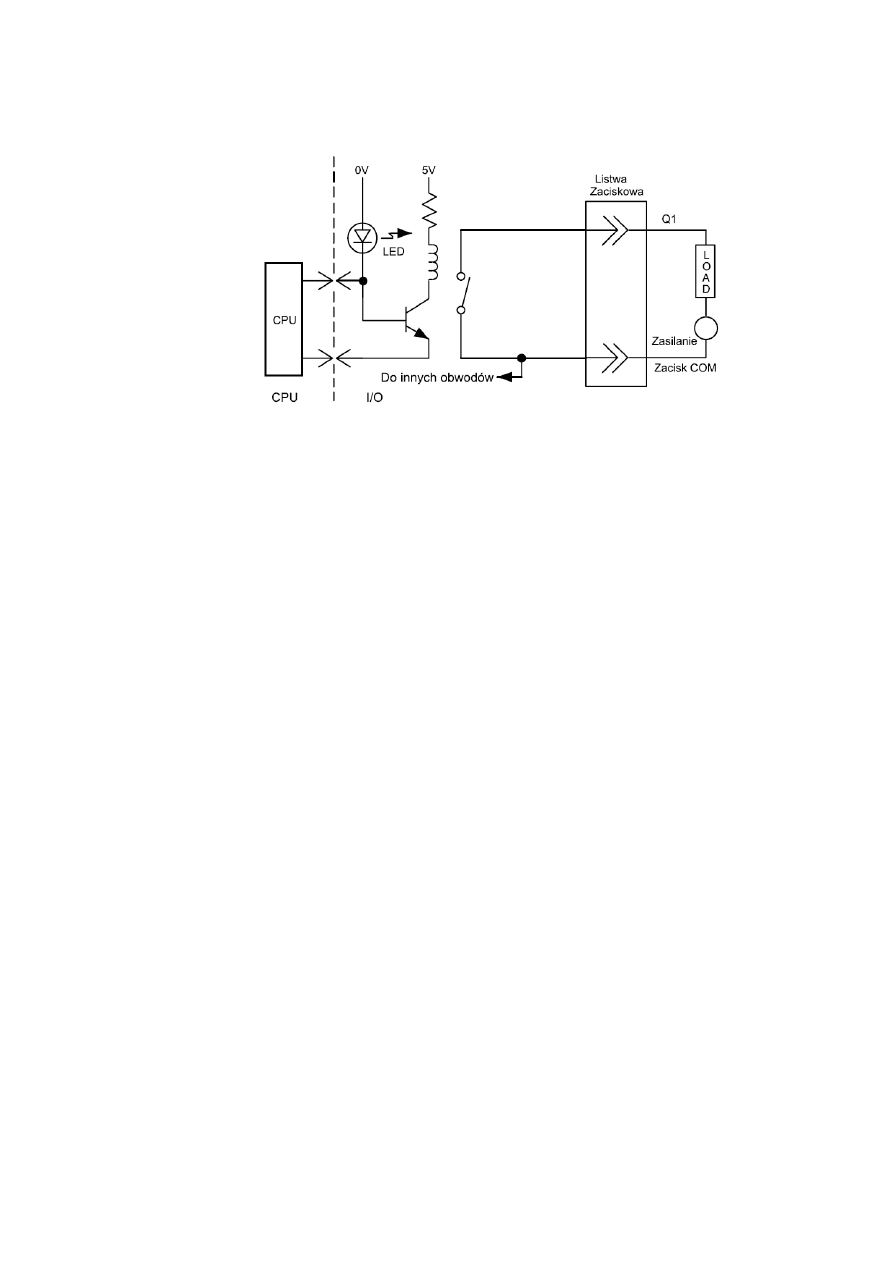
6
przekaźnikowe nie są wyposażone w bezpieczniki. Schemat elektryczny wyjścia
dyskretnego przedstawiono na Rysunku 4.
Rys. 4. Schemat elektryczny wyjścia dyskretnego PLC
Wymiana danych pomiędzy sterownikiem OMRON CPM1, a urządzeniem
programującym odbywa się poprzez interfejs komunikacyjny pracujący w
standardzie RS-232. Programowania sterownika można dokonywać przy pomocy
następujących metod:
używając oprogramowania komputerowego SysWin,
używając oprogramowania komputerowego Omron CX-One,
używając programatora ręcznego.
Użytkownik definiuje program sterujący w języku schematów drabinkowych LD
(Ladder Diagram). Jest to język graficzny, zbliżony do schematów stykowych
obwodów przekaźnikowych. Umożliwia realizację zadania sterowania za pomocą
standaryzowanych symboli graficznych. Symbole te umieszcza się w obwodach w
sposób podobny do „szczebli”. Wykonanie programu w języku LD polega na
"przepływie prądu" z lewej strony „szczebla” do prawej, analogicznie jak w
schemacie drabinkowym dla systemu przekaźników elektromechanicznych (Tab. 1).
Po wybraniu funkcji na ekranie zostaje wyświetlone okno dialogowe, w którym
możemy wprowadzić parametry, numer wejścia, wyjścia, wartości dla licznika.
Adresy wejść i wyjść składają się z dwóch części oddzielonych znakiem kropki.
Pierwsza część oznacza numer kanału, a druga oznacza numer bitu w słowie.
Podanie tylko numeru kanału oznacza operację na całym słowie. Ostatnią funkcją
programu musi być instrukcja END.
7
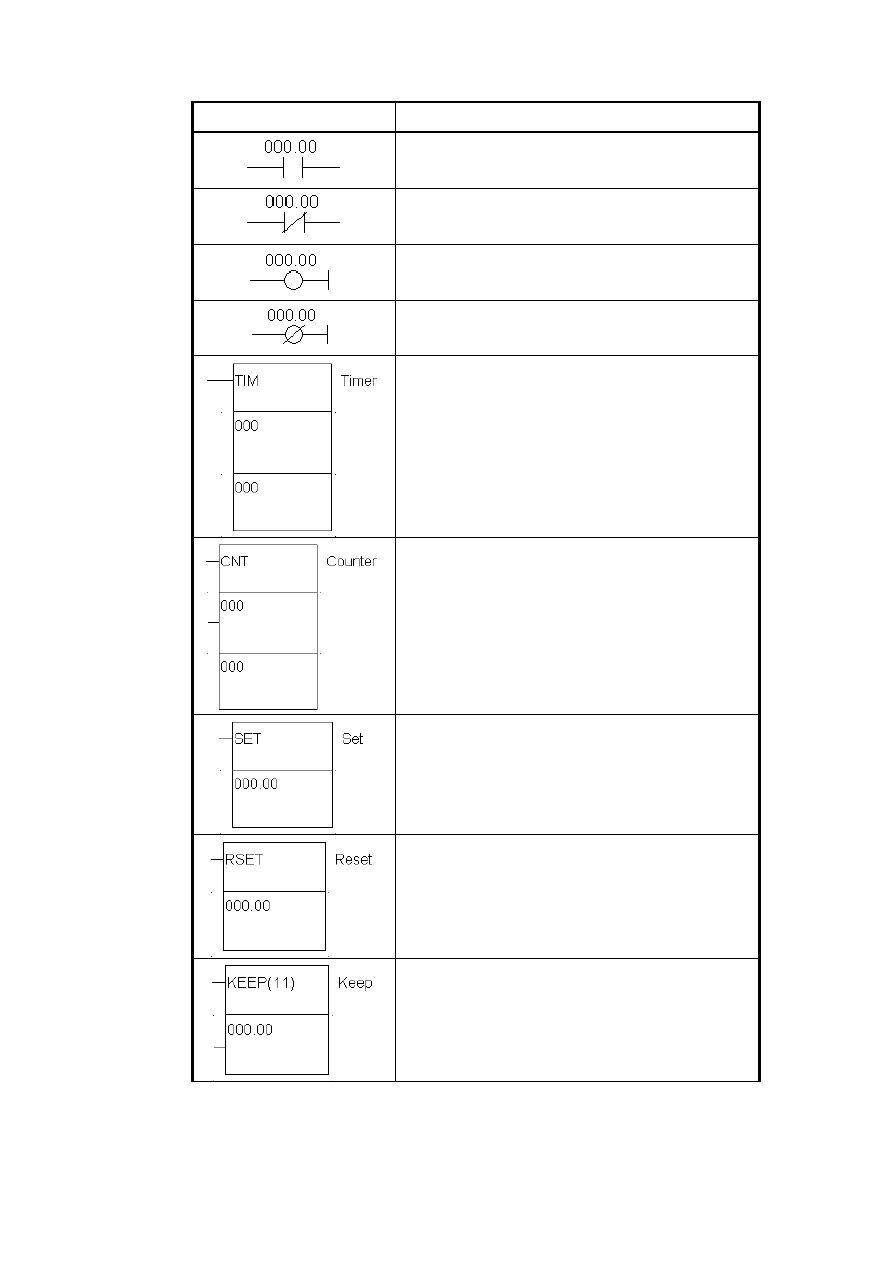
Tablica 1. Podstawowe symbole graficzne w języku schematów drabinkowych
Symbol
Znaczenie
Wejście cyfrowe aktywne stanem wysokim.
Wejście cyfrowe aktywne stanem niskim.
Wyjście cyfrowe aktywne stanem wysokim.
Wyjście cyfrowe aktywne stanem niskim.
Timer (czasomierz).
Licznik.
Funkcja
ustawiająca
wartość
bitu
(ustawiająca stan wysoki).
Funkcja kasująca wartość bitu (ustawiająca
stan niski).
Funkcja ustawiająca/kasująca wartość bitu.

8
3.
Przebieg ćwiczenia
A.
Zapoznać się z budową stanowiska laboratoryjnego. Zidentyfikować wejścia i
wyjścia sterownika. Określić ich adresy.
B.
Napisać program realizujący funkcję włącz/wyłącz przy użyciu dowolnego
wyłącznika i elementu wyjściowego.
C.
Napisać program realizujący funkcję logiczną AND lub OR (do wyboru) przy
użyciu dowolnych dwóch wyłączników i elementu wyjściowego.
D.
Napisać program zawierający funkcje TIM i CNT.
E.
Napisać program wykorzystujący funkcje pamięciowe SET/RSET lub KEEP
(do wyboru).
F.
Udzielić odpowiedzi na następujące pytania:
–
Do czego służą sterowniki przemysłowe?
–
Jaka jest główna różnica pomiędzy cyfrowymi systemami sterowania
produkcją opartymi na technice przekaźnikowej lub TTL, a systemami
zbudowanymi na sterownikach PLC?
4.
Sprawozdanie z ćwiczenia
W sprawozdaniu należy zamieścić opis czynności wykonanych podczas
ć
wiczenia, schematy drabinkowe, odpowiedzi na postawione pytania oraz własne
uwagi, komentarze i wnioski.
5.
Zagadnienia
budowa i zasada działania sterownika programowalnego, język schematów
drabinkowych, sterownik OMRON CPM-1,
6.
Literatura
[1]
www.omron.pl
Wyszukiwarka
Podobne podstrony:
3 instr eiua plc programowanie BR
7-instr-eiua-wzmacniaczhbmmvd2555
7 instr eiua wzmacniaczhbmmvd2555
1 instr eiua czujbkontaktid 103 Nieznany
2 instr eiua przekczasoweid 211 Nieznany (2)
6 instr eiua falownik
7 instr eiua wzmacniaczhbmmvd2555
2 instr eiua przekczasowe
Prezentacja PLC
W 5g PLC LICZNIKI
Sterowniki PLC
INSTR KLASYF DLUZNE
instr 2011 pdf, Roztw Spektrofoto
więcej podobnych podstron