Politechnika Warszawska
Instytut Automatyki i Robotyki
Prof. dr hab. inż. Jan Maciej Kościelny
PODSTAWY AUTOMATYKI
część 10
Struktury układów regulacji
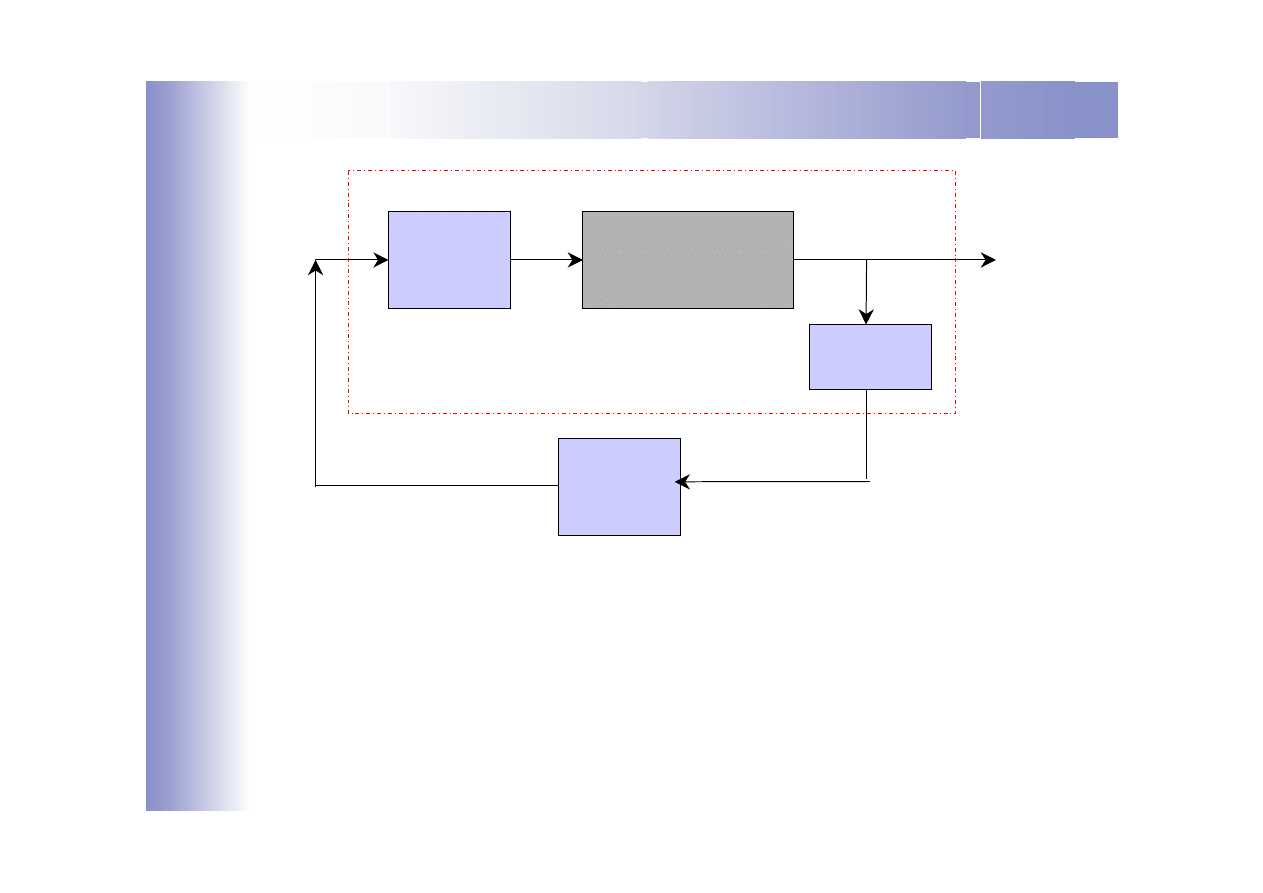
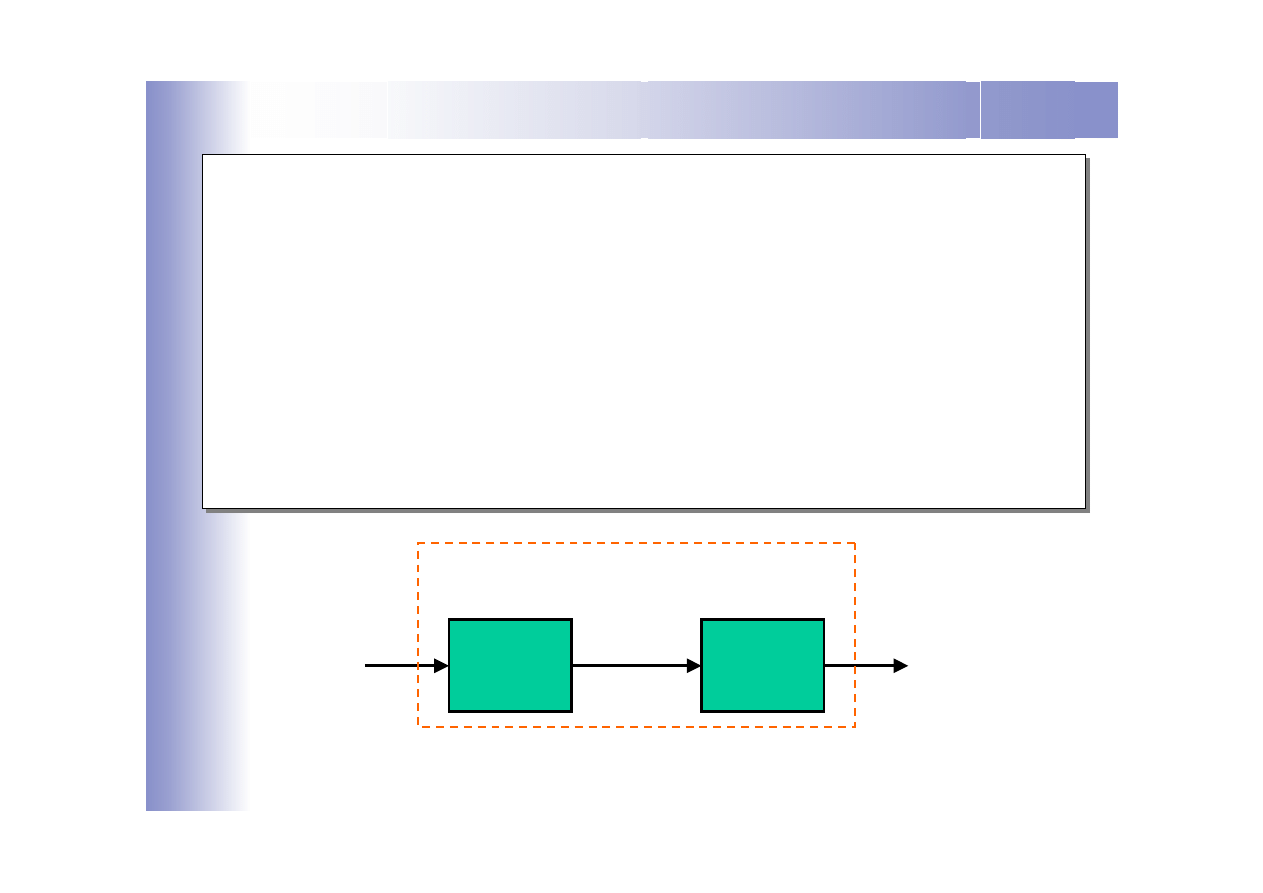
Obiekt regulacji
Regulator
Obiekt
regulacji
Przetwornik
pomiarowy
Element
wykonawczy
y
u
Własności zespołów wykonawczych i przetworników pomiarowych
włączone są do obiektu. Transmitancja obiektu opisuje więc
wypadkowe własności połączenia:
zespół wykonawczy + obiekt + przetwornik pomiarowy
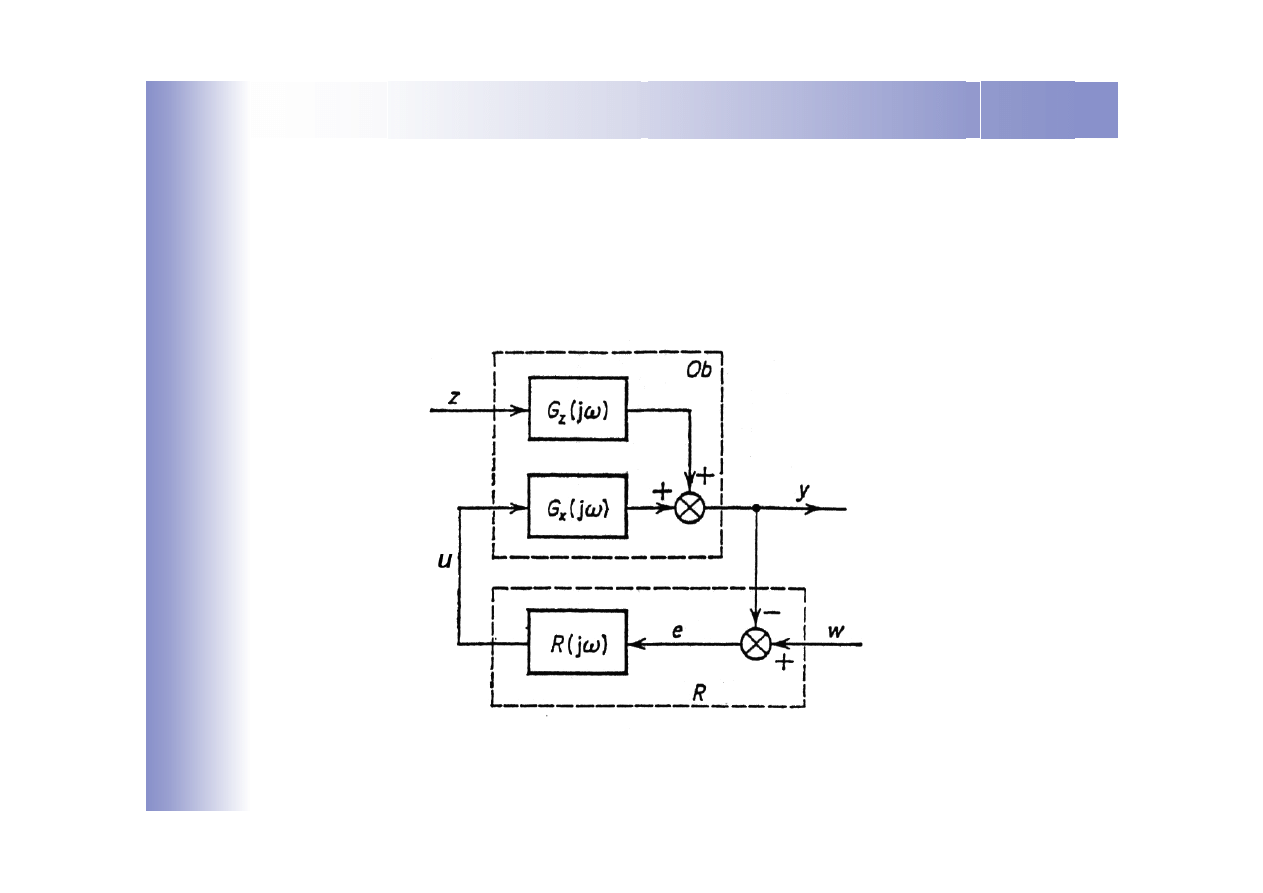
Uogólniona struktura jednoobwodowa
Transmitancja G
x
(s), opisująca związek pomiędzy sterowaniem u i
wyjściem y, może być inna niż transmitancja G
z
(s), opisująca związek
pomiędzy zakłóceniem z i wyjściem y
Regulacja kaskadowa
• franc. cascade = wodospad stopniowany
• w automatyce – regulacja w kolejnych obwodach
Kiedy stosujemy
Regulacja kaskadowa jest celowa dla obiektów:
• wieloinercyjnych,
• o stałych rozłożonych
• z opóźnieniem transportowym (w części G
2
),
Warunkiem utworzenia kaskadowego układu regulacji jest istnienie
w obiekcie mierzalnej pomocniczej wielkości regulowanej y
p
, która
szybciej reaguje na to zakłócenie niż główna wielkość regulowana y.
Regulacja kaskadowa jest celowa dla obiektów:
• wieloinercyjnych,
• o stałych rozłożonych
• z opóźnieniem transportowym (w części G
2
),
Warunkiem utworzenia kaskadowego układu regulacji jest istnienie
w obiekcie mierzalnej pomocniczej wielkości regulowanej y
p
, która
szybciej reaguje na to zakłócenie niż główna wielkość regulowana y.
G
1
G
2
y
p
y
u
OBIEKT
)
(
)
(
)
(
2
1
s
G
s
G
s
G
o
=
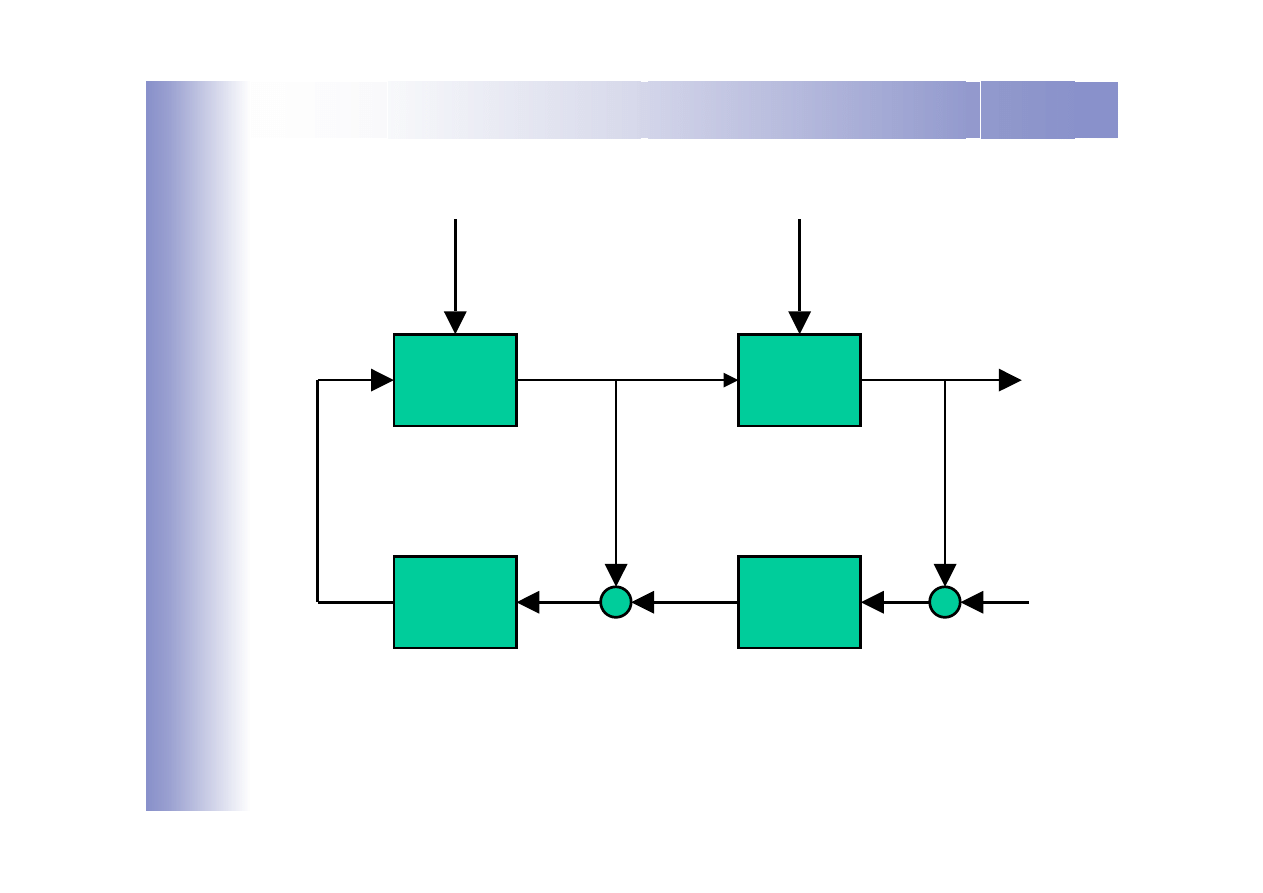
Schemat kaskadowego układu regulacji
G
1
G
2
R
2
R
1
-
+
-
+
z
1
z
2
y
y
0
u
1
u
2
y
p
e
Regulator pomocniczy
Regulator główny
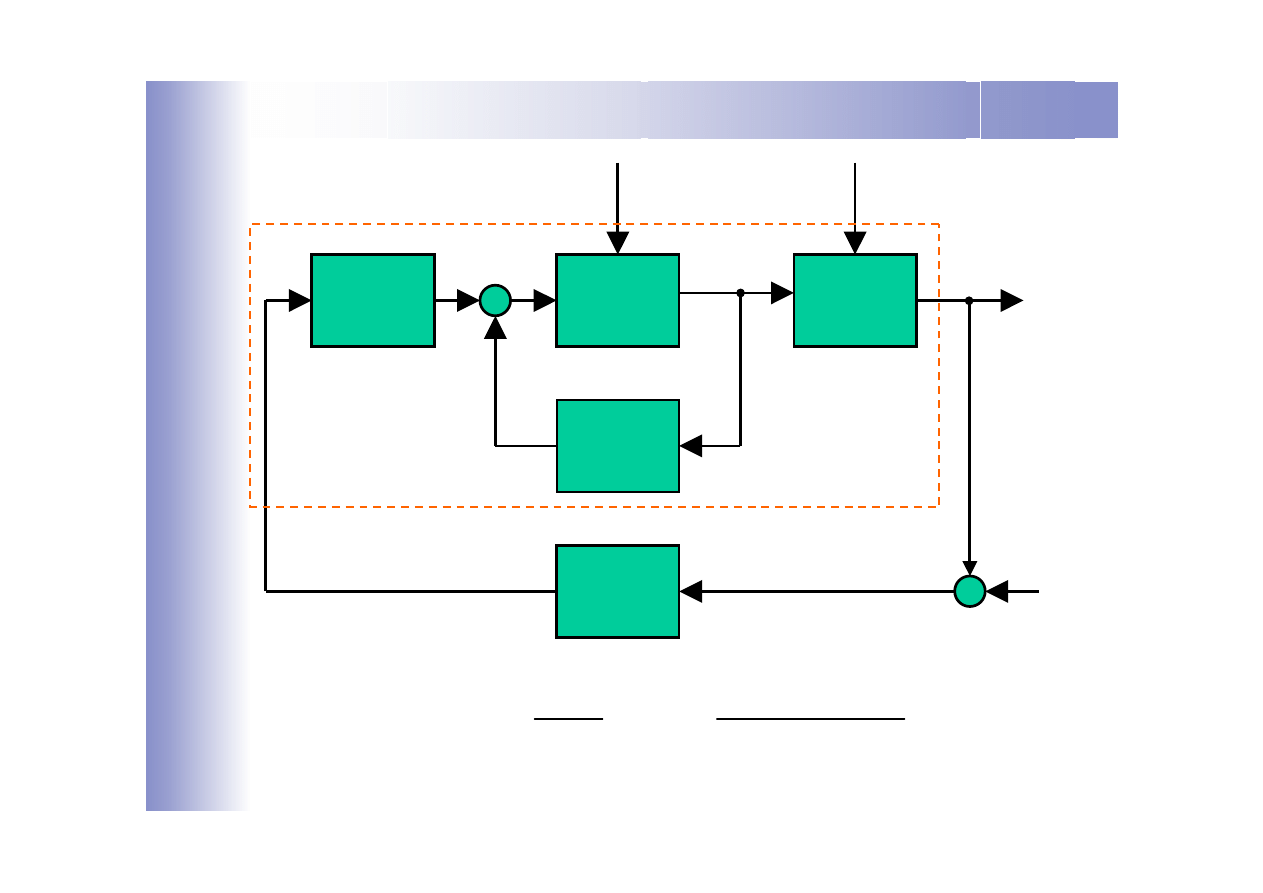
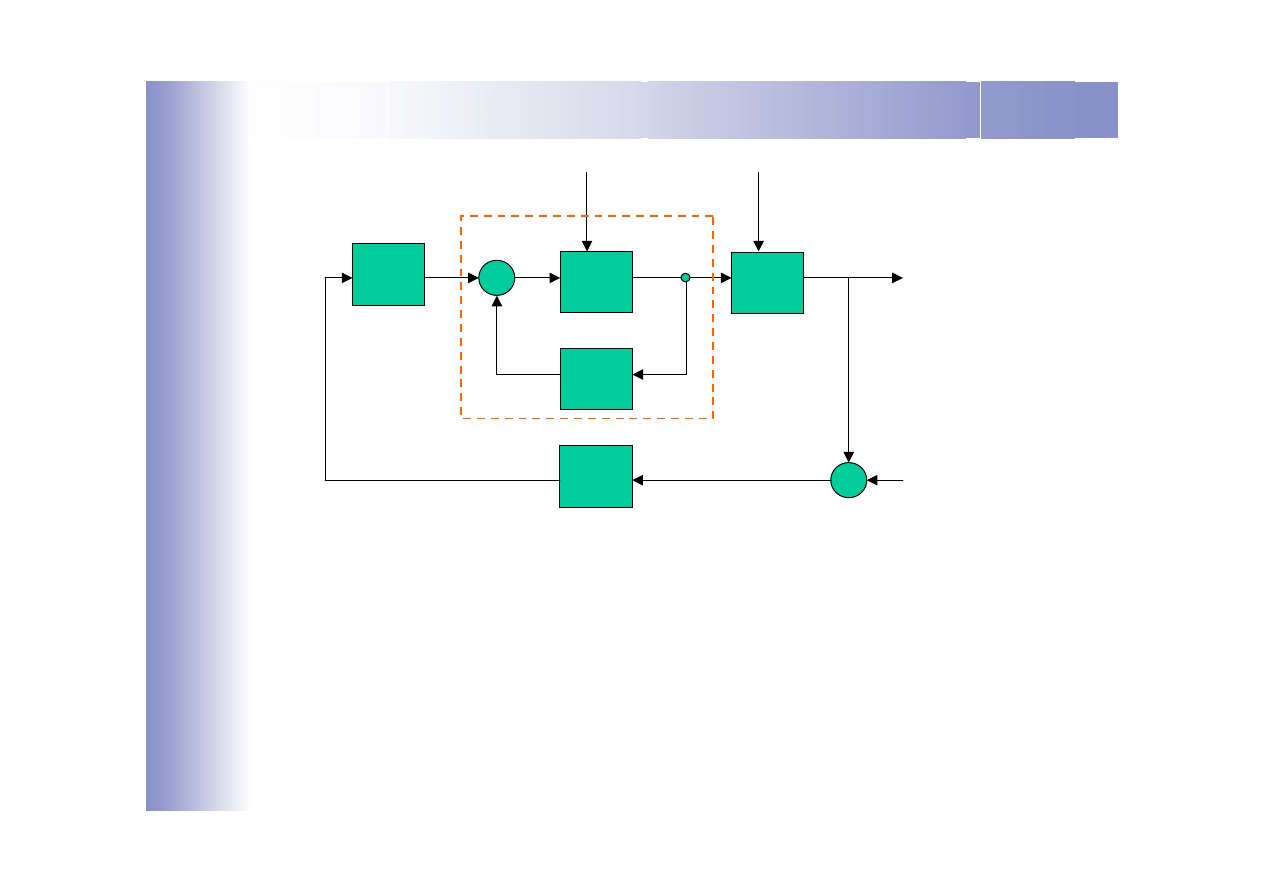
Schemat zmodyfikowany
+
-
+
-
G
1
G
2
R
2
R
1
z
1
z
2
y
y
0
u
1
u
2
y
p
R
2
e
Obiekt zmodyfikowany
)
(
)
(
1
)
(
)
(
)
(
)
(
)
(
)
(
2
1
2
1
2
1
.
s
R
s
G
s
R
s
G
s
G
s
u
s
y
s
G
m
ob
+
=
=
Neutralizacja właściwości dynamicznych
części G
1
obiektu
1
)
(
)
(
2
1
>>
ω
ω
j
R
j
G
)
(
)
(
1
)
(
)
(
)
(
)
(
)
(
)
(
2
1
2
1
2
1
.
s
R
s
G
s
R
s
G
s
G
s
u
s
y
s
G
m
ob
+
=
=
w paśmie częstotliwości, w którym zachodzi:
)
(
)
(
2
.
ω
ω
j
G
j
G
m
ob
≈

Tłumienie wpływu zakłóceń
Skuteczność kompensacji zakłóceń Z1 i Z2 ocenia się
w oparciu o częstotliwościowy wskaźnik jakości.
Dla Z2 wskaźnik jakości wynosi:
)
(
)
(
1
)
(
)
(
)
(
)
(
1
1
)
(
'
)
(
)
(
1
2
1
2
2
1
2
ϖ
ϖ
ϖ
ϖ
ϖ
ϖ
ϖ
ϖ
ϖ
j
G
j
R
j
G
j
R
j
R
j
G
j
E
j
E
j
q
Z
⋅
+
⋅
+
=
=
Dla Z1 wskaźnik jakości wynosi:
)
(
)
(
1
1
)
(
)
(
1
2
2
1
ϖ
ϖ
ϖ
ϖ
j
G
j
R
j
q
j
q
Z
Z
⋅
+
=
Zakłócenia Z1 są kompensowane
silniej niż zakłócenia Z2.
)]
(
)
(
1
[
1
2
ϖ
ϖ
j
G
j
R
⋅
+
Linearyzacja charakterystyki statycznej
Charakterystyka statyczna obiektu: y
p
=f(u
2
)
Charakterystyka zmodyfikowana: y
p
=f(A)
u
2
=A-B → A=u
2
+B
y
0
G
1
+
-
R
2
R
2
G
2
R
1
A
B
y
p
y
+
-
e
u
1
z
1
z
2
u
2
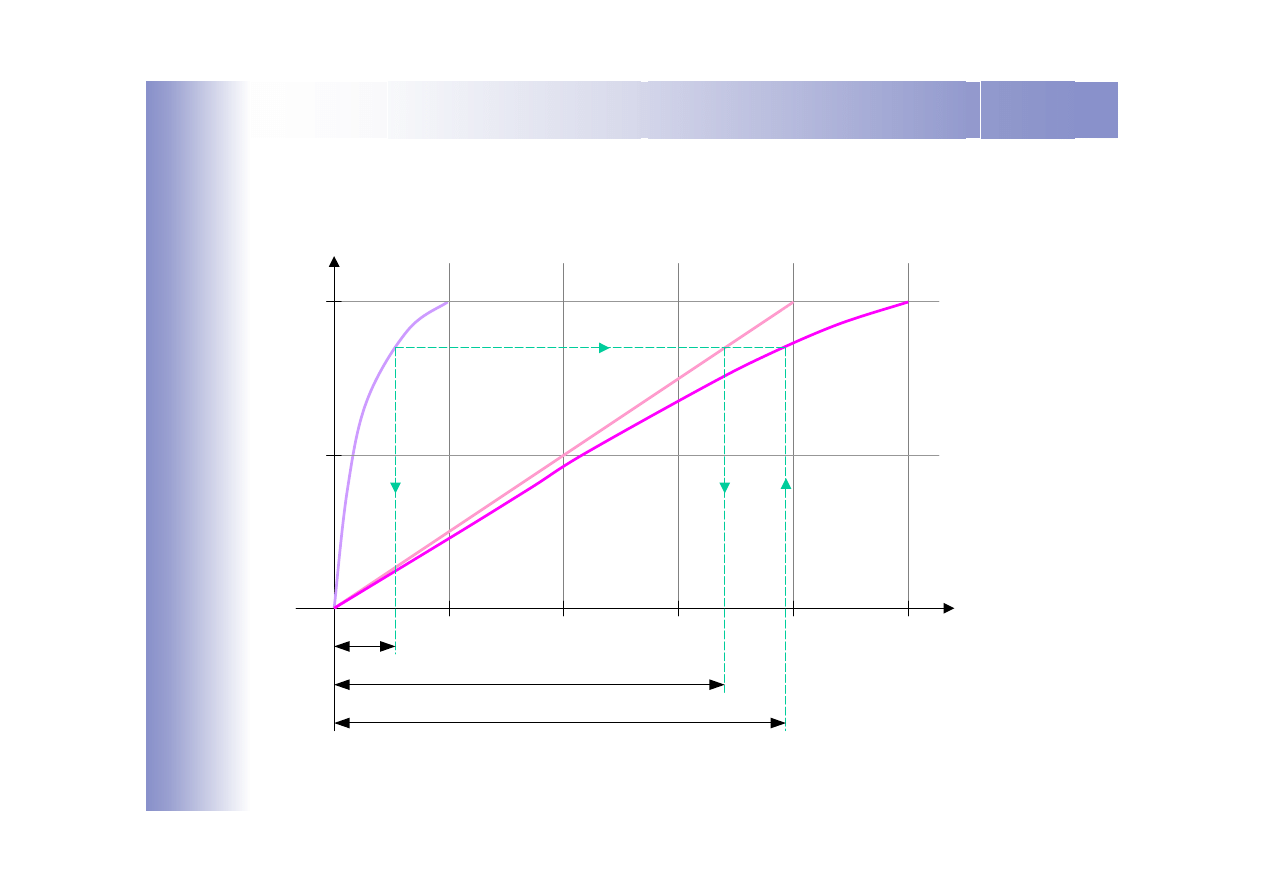
Linearyzacja charakterystyki statycznej
części G1 obiektu
wejście
y
p
0
0,5
1
1
2
3
4
5
u
2
B
A=u
2
+B
y
p
=f(u
2
)
y
p
=f(B)
y
p
=f(A)
Kompensacja zakłóceń z
1
+
-
+
-
G
1
G
2
R
2
R
1
z
1
z
2
y
y
0
u
1
u
2
y
p
R
2
e
Zakłócenia z
1
kompensowane są
krotnie silniej niż w układzie jednoobwodowym z regulatorem R
1
.
[
]
)
(
)
(
1
2
1
ω
ω
j
R
j
G
+
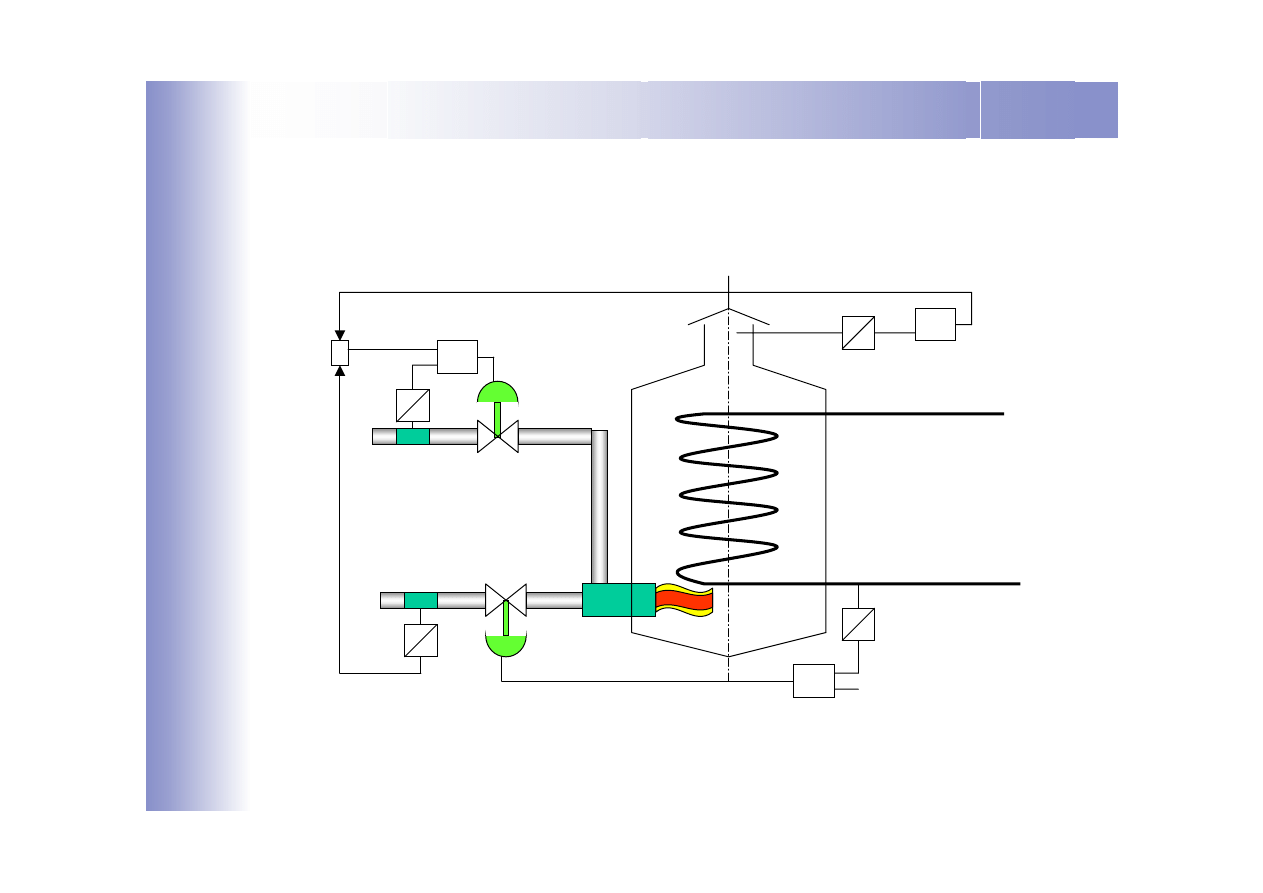
Układ regulacji temperatury
R
para
y
y
0
x
Kaskadowy układ regulacji temperatury
R
g
R
p
para
y
y
0
x
1
y
p
x
2
Kaskadowy układ regulacji temperatury
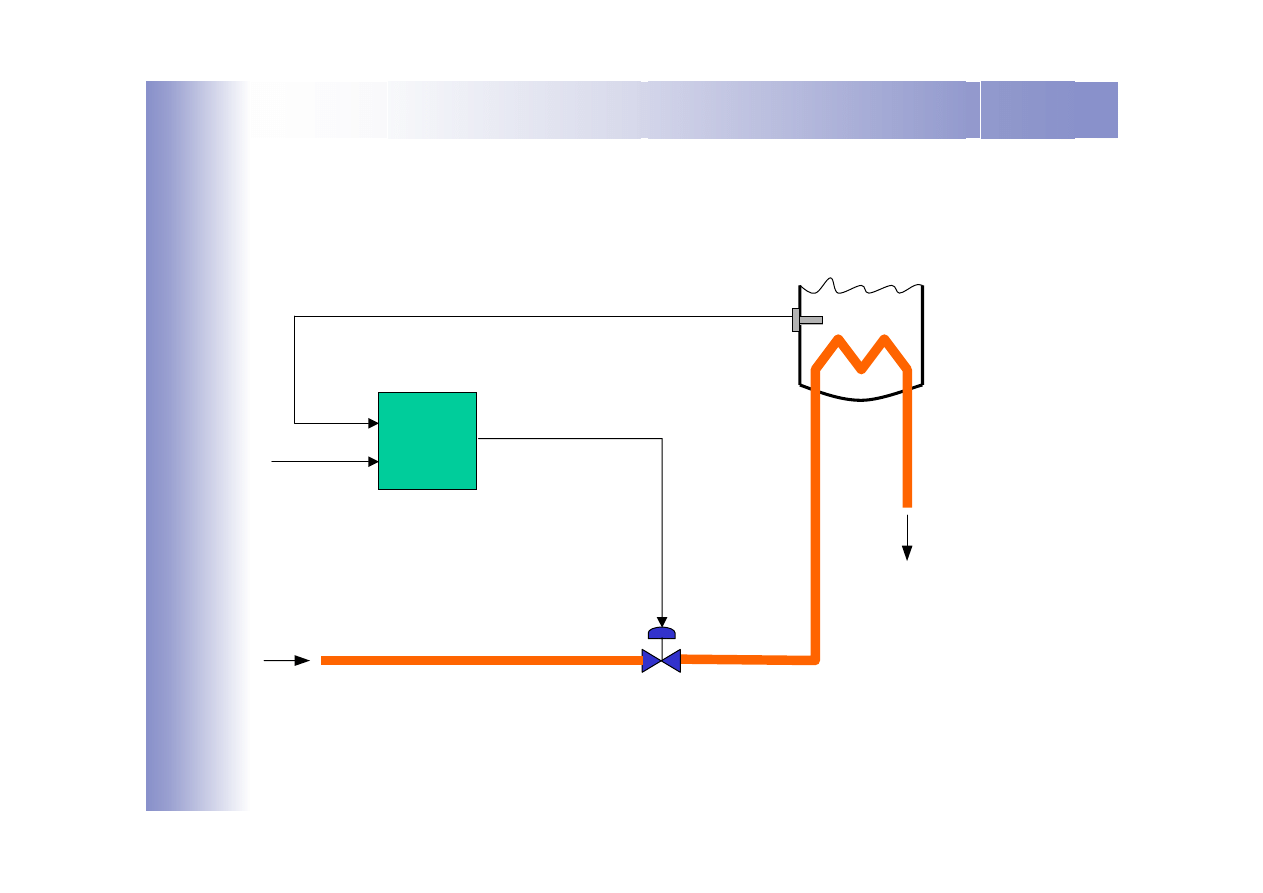
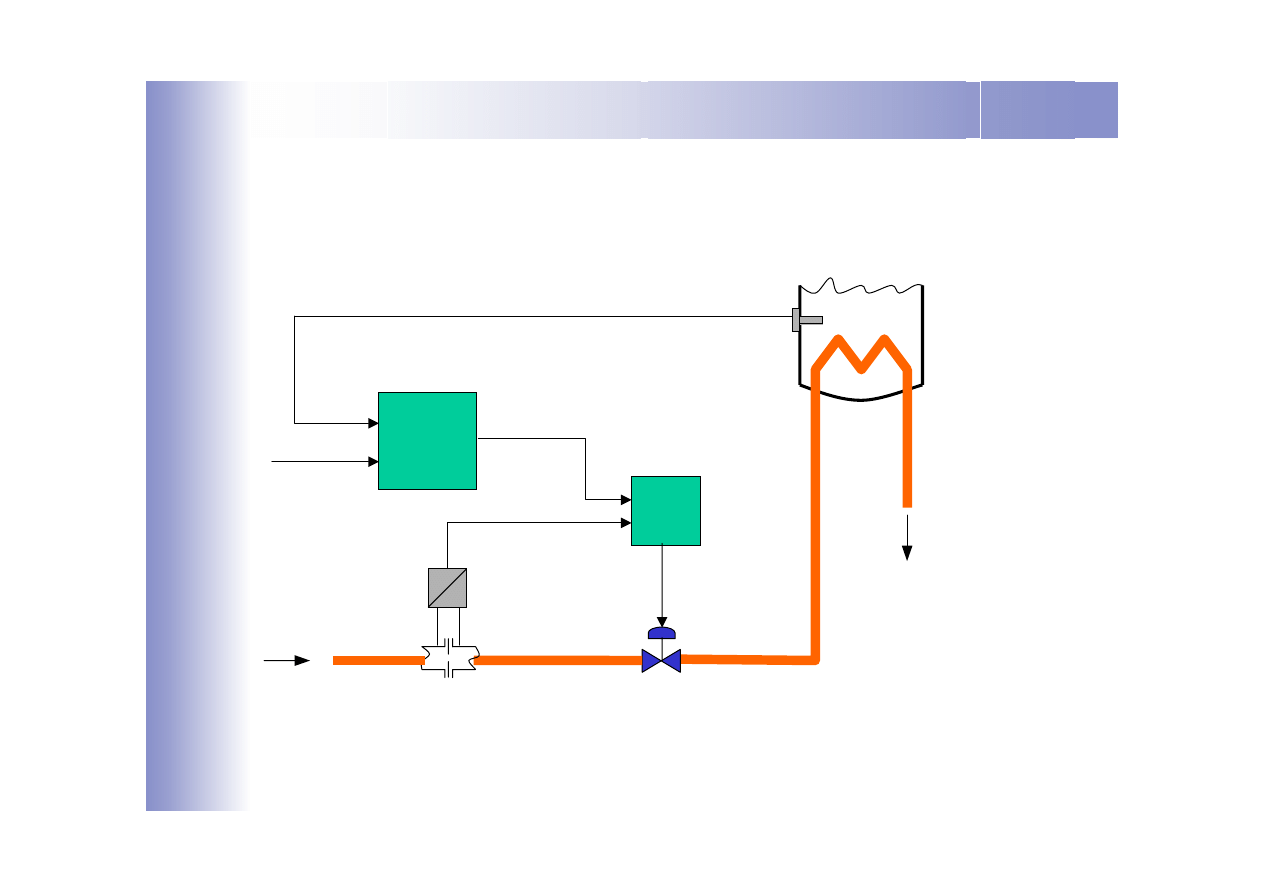
Układ regulacji poziomu na półce zasilającej kolumny
rektyfikacyjnej.
PID
F
L
PID
G1(s) – przepływ, szybki obiekt
G2(s) – poziom, dłuższe stałe czasowe
Z1 – główne zakłócenie, wahania przepływu
Dobór regulatorów i nastaw
Zazwyczaj:
– regulator główny typu PI lub PID
– regulator pomocniczy typu P lub PD
nastawy regulatora pomocniczego jak dla układu
jednoobwodowego (obwód pomocniczy),
nastawy regulatora głównego jak dla układu jednoobwodowego
(obiekt zmodyfikowany)
nastawy regulatora pomocniczego jak dla układu
jednoobwodowego (obwód pomocniczy),
nastawy regulatora głównego jak dla układu jednoobwodowego
(obiekt zmodyfikowany)
Zalety i ograniczenia
neutralizacja własności dynamicznych części G1 obiektu
silna kompensacja zakłóceń z1
linearyzacja charakterystyki statycznej części G1 obiektu
brak poprawy jakości regulacji względem zakłóceń z2
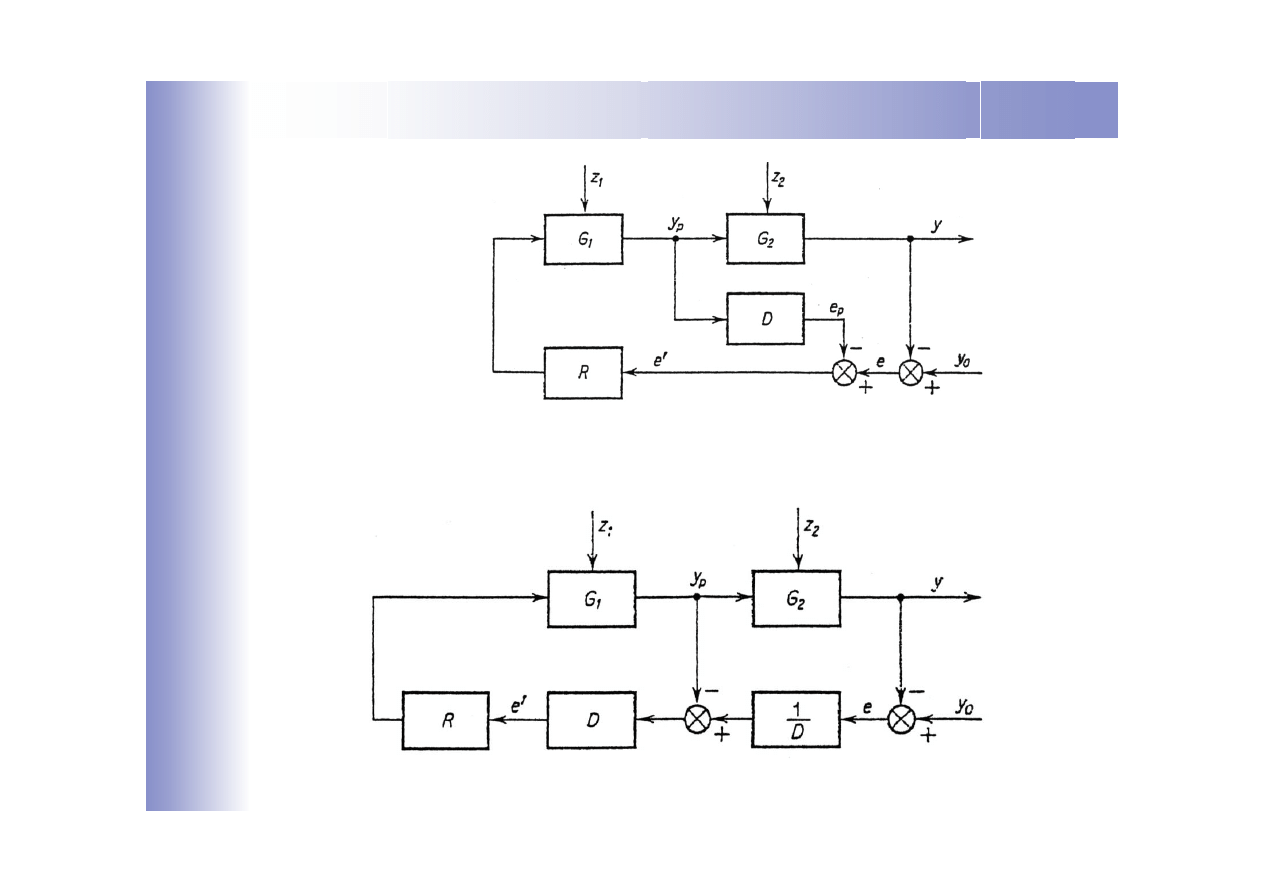
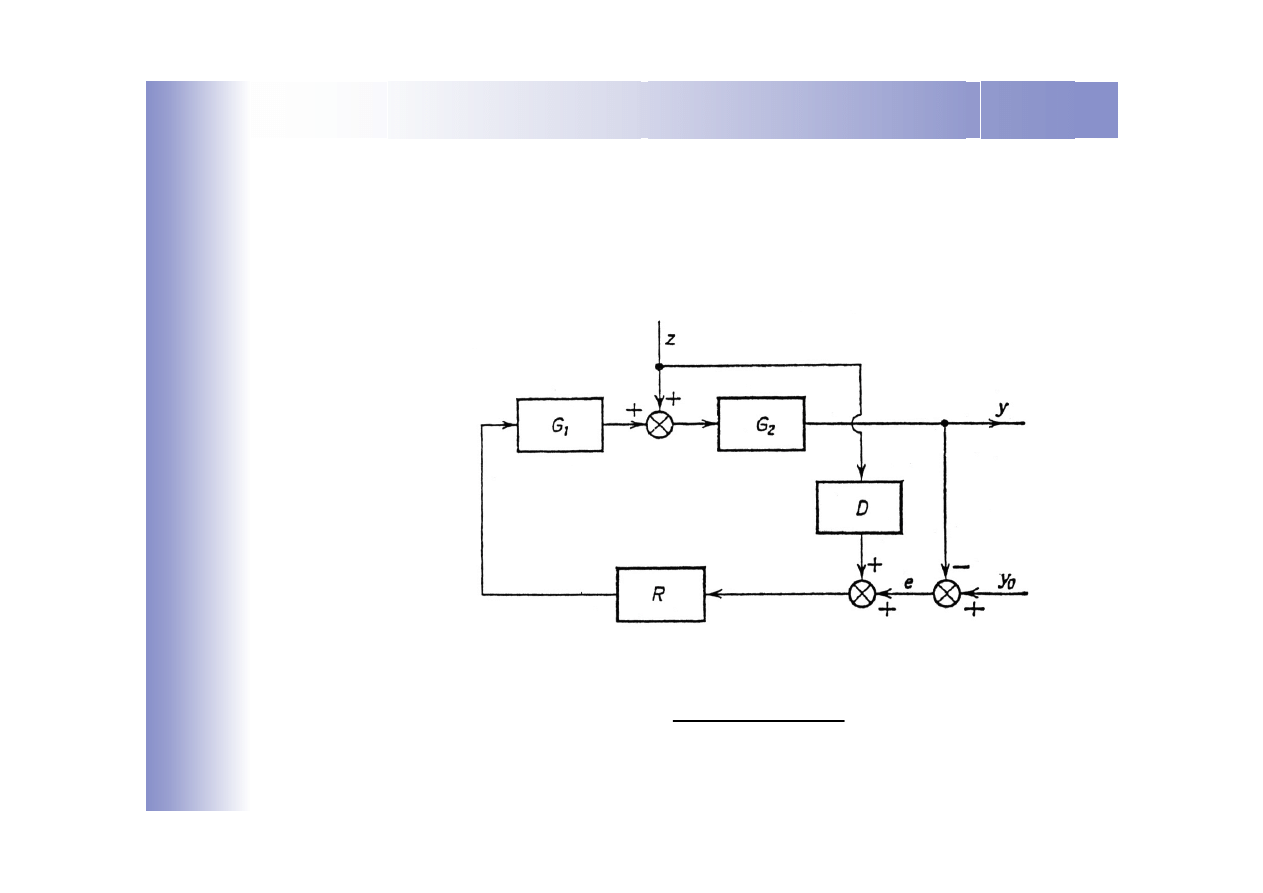
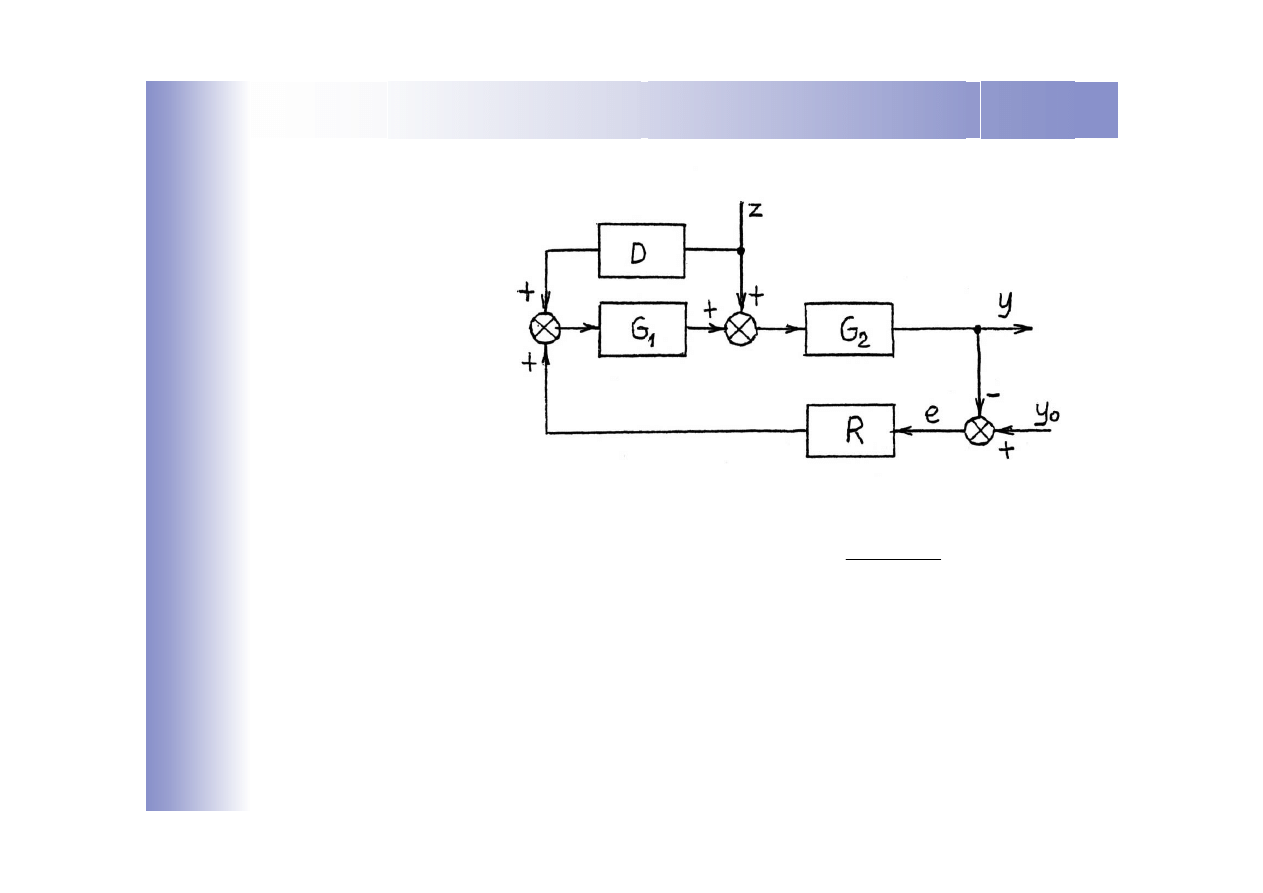
Układy z pomocniczą korekcją dynamiczną
Struktura pierwotna
Struktura przekształcona do równoważnego układu kaskadowego
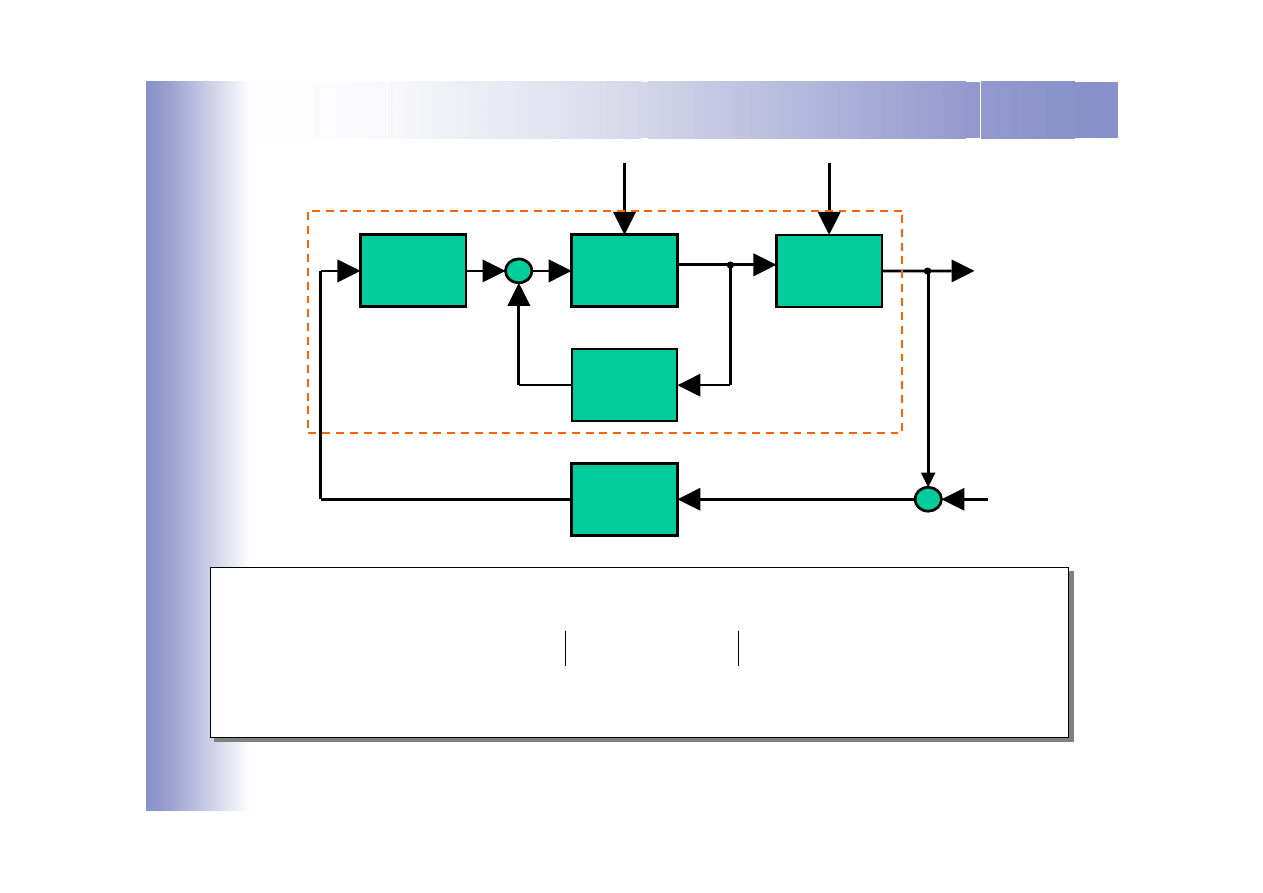
Układy z pomocniczą korekcją dynamiczną
1
)
(
+
=
Ts
Ts
s
D
)
1
1
(
)
(
s
T
k
s
R
i
p
+
=
s
T
s
D
i
1
1
)
(
1
+
=
p
k
s
D
s
R
=
)
(
)
(
co odpowiada, dla T=T
i
, użyciu w układzie kaskadowym regulatora
głównego typu PI:
Najczęściej:
oraz regulatora pomocniczego typu P:
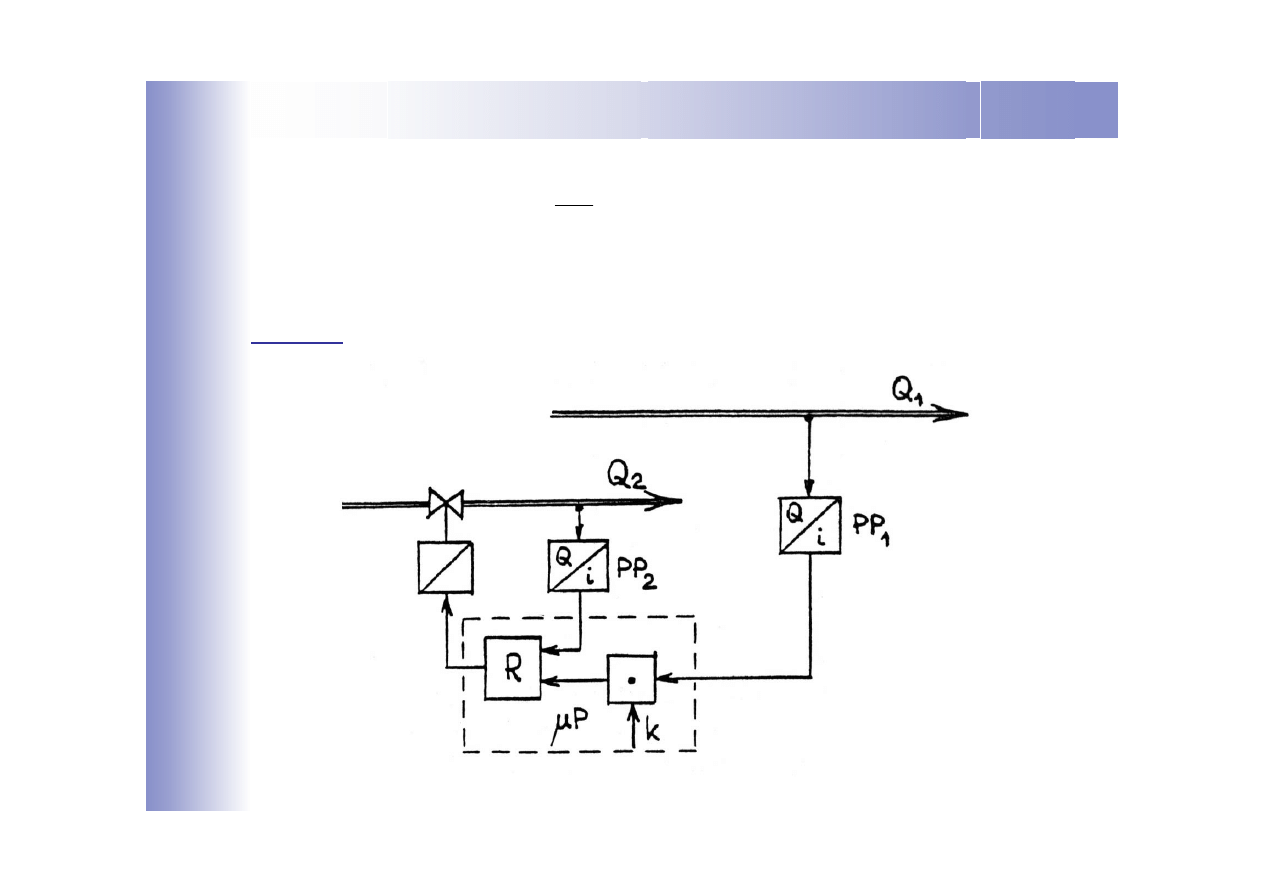
Regulacja stosunku
k
Q
Q =
1
2
Regulacja stosunku:
z możliwością oddziaływania jedynie na Q
2
.
(Uwaga: wpływ zakresów pomiarowych przetworników PP
1
i PP
2
)
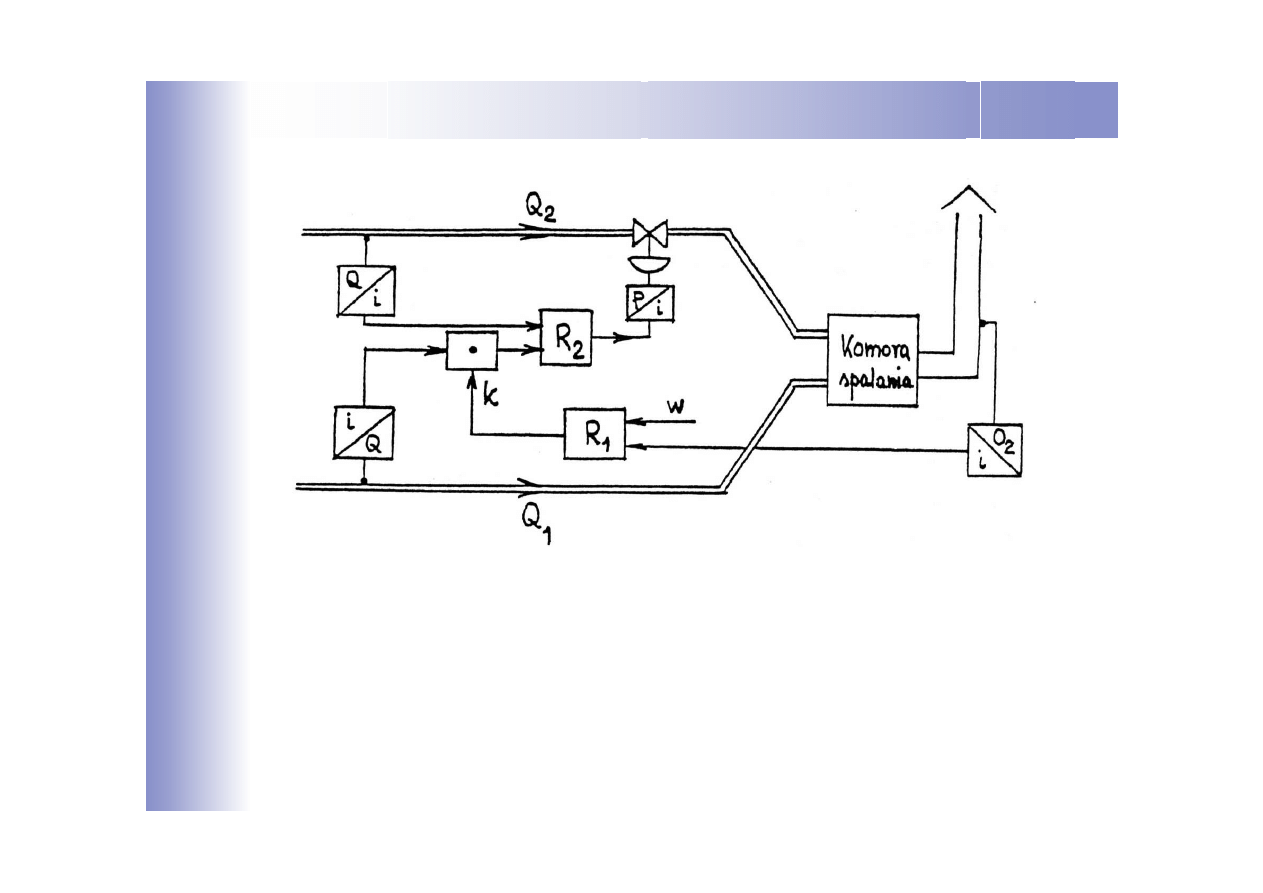
Kaskadowa regulacja stosunku
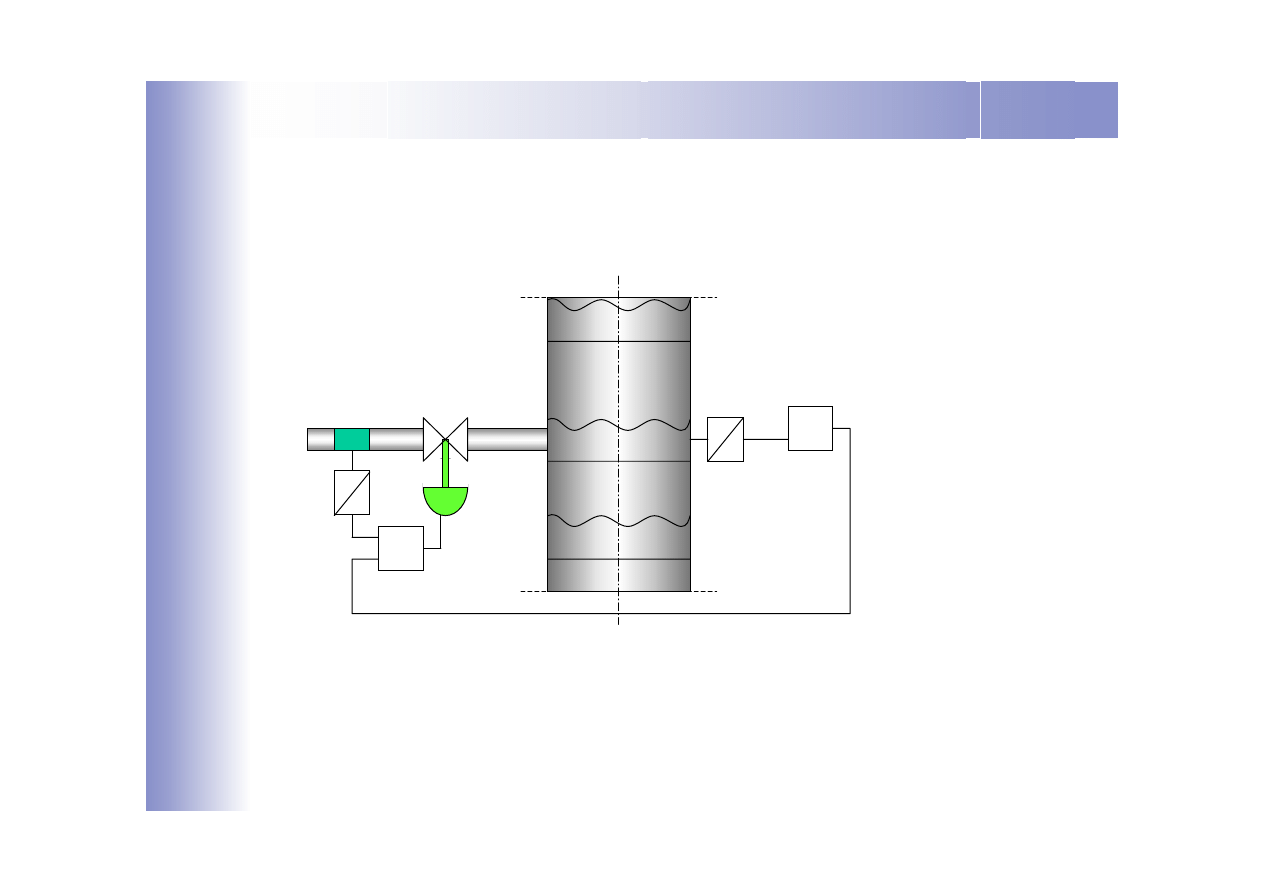
Przykład optymalizacji procesu spalania przez utrzymywanie stałej
zawartości O
2
w spalinach
paliwo
powietrze
PID
F
Q
PID
F
PID
T
x
ROPA
POWIETRZE
OLEJ
Regulacja zawartości tlenu w spalinach
Kaskadowa regulacja stosunku
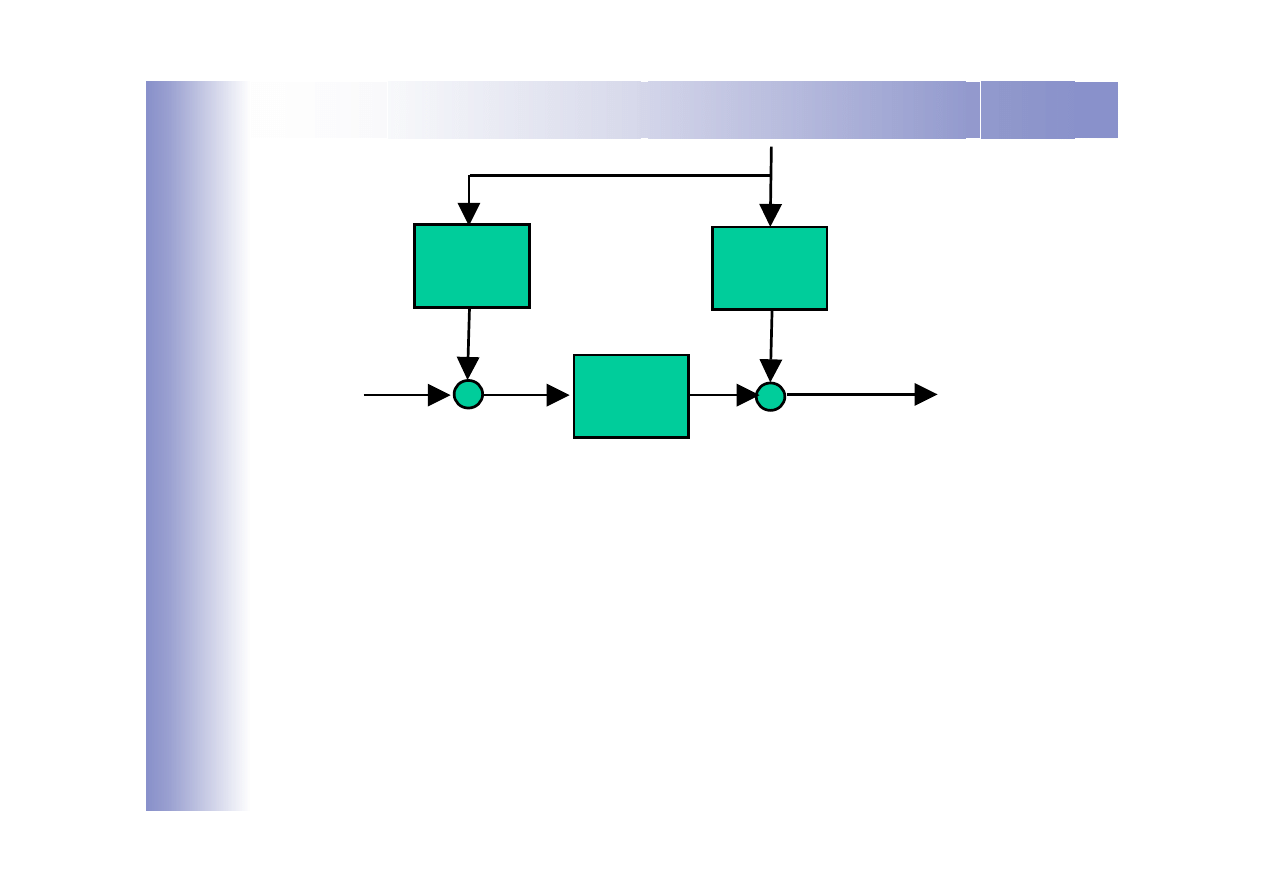
Zasada kompensacji zakłóceń
K
G
ob
+
+
z
y
G
z
u
+
+
Warunek realizacji:
możliwość pomiaru zakłócenia
znajomość własności dynamicznych obiektu G
ob
i toru zakłócenia G
z
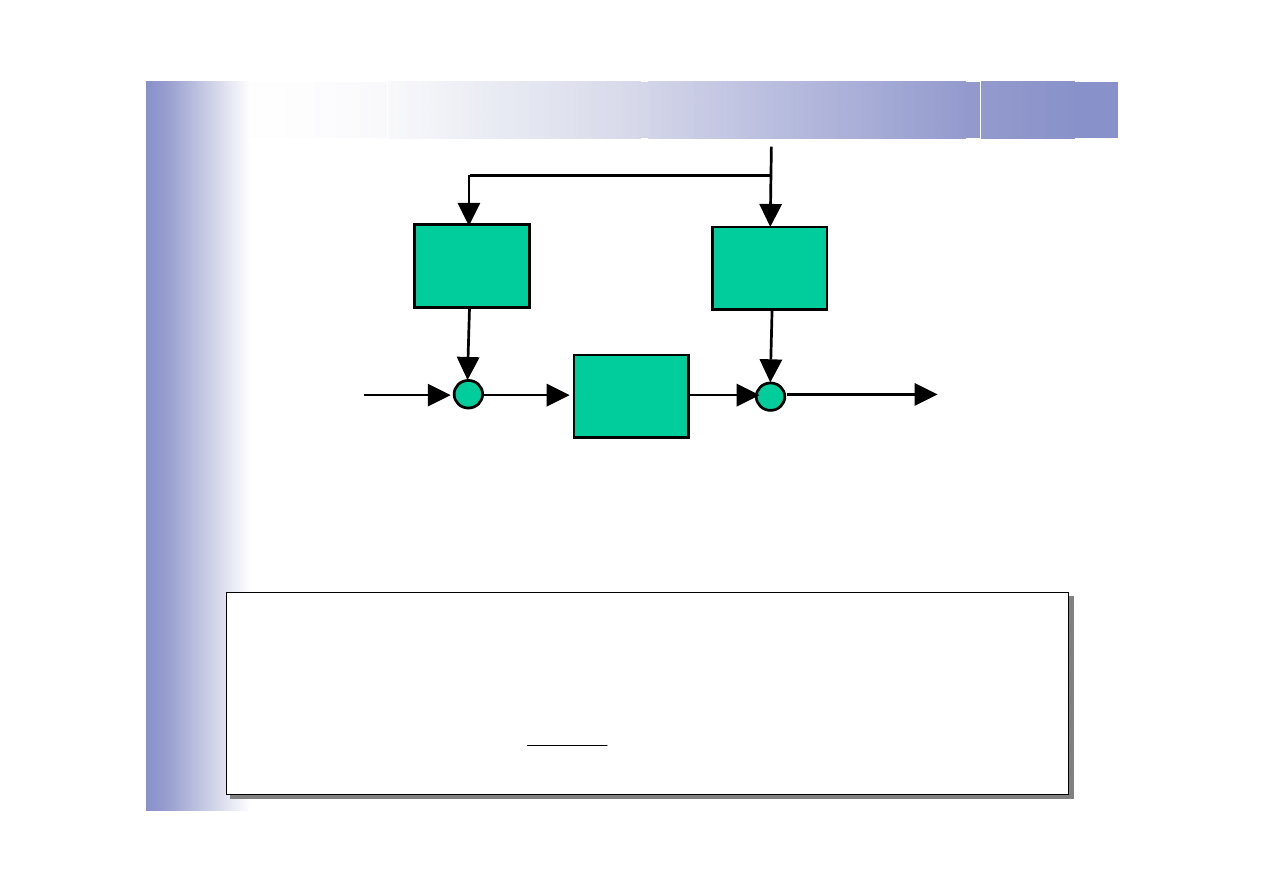
Zasada kompensacji zakłóceń
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
s
z
s
G
s
K
s
z
s
G
s
u
s
G
s
y
ob
z
ob
+
+
=
0
)
(
)
(
)
(
=
+
s
G
s
K
s
G
ob
z
K
G
ob
+
+
z
y
G
z
u
+
+
)
(
)]
(
)
(
)
(
[
)
(
)
(
)
(
s
z
s
G
s
K
s
G
s
u
s
G
s
y
ob
z
ob
+
+
=
)
(
)
(
)
(
s
G
s
G
s
K
ob
z
−
=
Warunek absolutnej inwariantności: y(s)/z(s)=0
Wpływ zakłócenia jest całkowicie
skompensowany
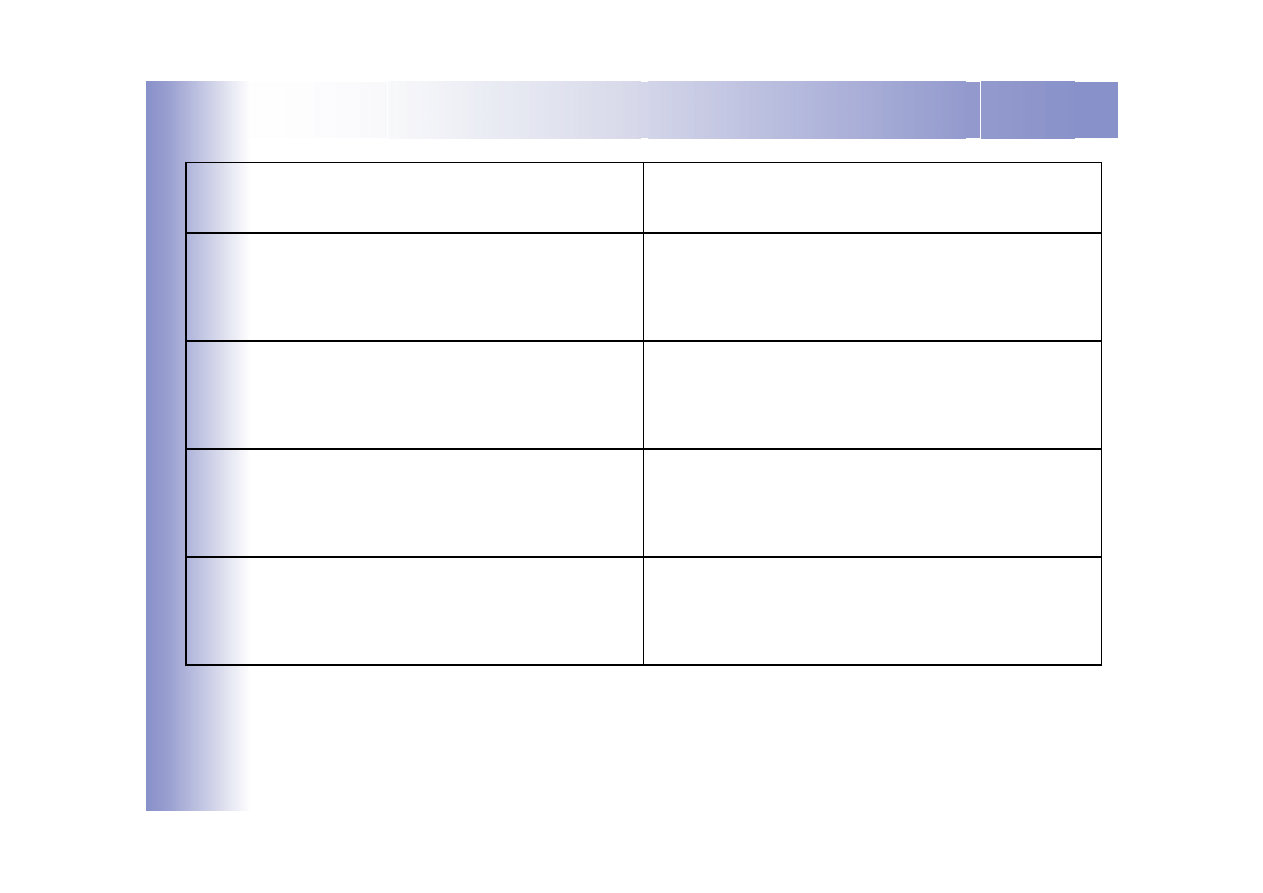
Kompensacja a regulacja
błyskawiczne działanie
wolniejsze działanie
mała odporność na zmiany parametrów
obiektu
duża odporność na zmiany parametrów
obiektu
kompensuje wpływ tylko jednego
zakłócenia na wielkość sterowaną
zabezpiecza przed wpływem wszystkich
zakłóceń na wielkość regulowaną
teoretycznie jest możliwa całkowita
eliminacja wpływu zakłócenia na wyjście
obiektu
nie jest możliwa całkowita eliminacja
wpływu zakłócenia na wyjście obiektu
Układy kompensacji
Układy regulacji
Układy zamknięto-otwarte
W układach tych wykorzystuje się bezpośredni pomiar zakłócenia
do wytworzenia oddziaływania kompensującego wpływ tego
zakłócenia na wyjście obiektu
)
(
)
(
1
)
(
1
ω
ω
ω
j
G
j
R
j
D
−
=
Struktura 1
Układy zamknięto-otwarte
Struktura 2
)
(
1
)
(
1
ω
ω
j
G
j
D
−
=
Ograniczenia:
a)
zwykle zakłóceń jest wiele, część z nich może być trudna lub
niemożliwa do zmierzenia
b)
właściwości obiektu G
1
nie są stałe w czasie
Wyszukiwarka
Podobne podstrony:
10 Struktury ukladow regulacjiid 1
4 Dyskretne układy regulacji, rozdział 6 Podstawowe struktury układów regulacji
8 ocena jakości układów regulacji
Metoda projektowania układów regulacji za pomocą linii pierwiastkowych
Korekcja liniowych układów regulacji
cw 7?danie ukladow regulacji dwupolozeniowej
08 Ocena jakości liniowych układów regulacji
2010 Lab 10 struktury drzewiaste
Podstawy zarządzania Franciszek Tomaszewski, zarzadz-10, STRUKTURA ORGANIZACYJNA PRZEDSIĘBIORSTWA
SYM T 27-01.DOC, MODELOWANIE CIĄGŁYCH I DYSKRETNYCH UKŁADÓW REGULACJI
cwiczenie 4 modelowanie dyskretnych ukladów regulacji
modelowanie ciągłych i dyskretnych układów regulacji
cw 7?danie ukladow regulacji dwupolozeniowej
Ćw 7 Korekcja liniowych układów regulacji
Korekcja liniowych układów regulacji, Elektrotechnika, SEM4, ARA ćwiczenia
Modelowanie ciągłych i dyskretnych układów regulacji w dziedzinie czasu by Gabcio
10. Struktura i funkcje kwasów nukleinowych, biologia, licencjat eksperyment
modelowanie układów regulacji
więcej podobnych podstron