
Laboratorium Podstaw Automatyki
- 1 -
•
•
•
•
MODELOWANIE UKŁADÓW REGULACJI
Badanie w dziedzinie częstotliwości
1. Wprowadzenie
W ćwiczeniu tym analiza układów w dziedzinie częstotliwości wykorzystana jest do badania
właściwości elementów i układów regulacji. Do wykreślania charakterystyk
częstotliwościowych wykorzystywany jest program CC.
W ramach przygotowania teoretycznego należy zapoznać się z:
pojęciami transmitancja operatorowa i transmitancja widmowa, sposobami ich zapisu
(funkcja wymierna, postać „zera-bieguny”, suma ułamków prostych, z wyróżnieniem stałych
czasowych),
sposobami wykreślania charakterystyk częstotliwościowych (Bodego, Nyquista, Nicholsa),
sposobami określania stabilności układu regulacji na podstawie rozkładu biegunów
transmitancji i charakterystyk częstotliwościowych,
metodami wyznaczania transmitancji zastępczej układów złożonych.
2. Uwagi ogólne o programie symulacyjnym CC.
Program CC umożliwia symulację komputerową zarówno ciągłych "ANALOG MODE", jak
i nieciągłych (impulsowych) "DIGITAL MODE" liniowych układów automatycznej regulacji.
Program umożliwia analizę zarówno w dziedzinie czasu (odpowiedzi skokowe i impulsowe
jak i w dziedzinie częstotliwości (charakterystyki Bodego zwykłe, logarytmiczne i
asymptotyczne, charakterystyki Nyquista, charakterystyki Nicholsa). Program ma trzy istotne
ograniczenia:
a) Konieczność wprowadzania transmitancji wszystkich elementów układu w postaci
wielomianowej z ewentualnym rzeczywistym czasem opóźnienia. Wyznaczanie transmitancji
zastępczej układu złożonego możliwe jest poprzez wpisanie wzoru wiążącego transmitancję
zastępczą z transmitancjami elementów układu. Wzór ten musi być wyprowadzony poza
programem, na podstawie schematu zastępczego układu.
b) Niemożność wprowadzenia nawet najprostszych członów nieliniowych.
c) Brak możliwości zmiany jakiegokolwiek parametru wprowadzonej transmitancji – zmienianą
transmitancję trzeba wprowadzić w całości.
2.1. Podstawowe zasady posługiwania się programem.
Posługiwanie się programem polega na wydawaniu poleceń w trybie tekstowym. Wykaz
najważniejszych poleceń podano w tabeli 1.
Poszczególne wprowadzane transmitancje oznacza się unikalną nazwą (np. „K1” lub „Obiekt”)
przydatną przy dalszej analizie układów zawierających daną transmitancję.
Wprowadzenie transmitancji poleceniem „GENTER” lub „DENTER” odbywa się wg
ustalonego porządku przedstawianego kolejno na ekranie a mianowicie:
• liczba (ozn. #) wielomianów w liczniku (ang. numerator), a następnie w kolejnych
wierszach rząd i współczynniki kolejnych wielomianów licznika (od najwyższej potęgi),
• analogicznie liczba wielomianów w mianowniku (ang. denominator), rząd i współczynniki
kolejnych wielomianów mianownika.
Laboratorium Podstaw Automatyki
Modelowanie – dziedzina częstotliwości
- 2 -
Uwaga: Separatorem współczynników jest przecinek, a znakiem oddzielającym część
ułamkową liczby jest kropka.
Możliwe jest przejście na ekwiwalentną (tj. opisującą obiekt o analogicznych właściwościach
dynamicznych) transmitancję dyskretną przez wprowadzenie polecenia "CONVERT" po
wprowadzeniu odstępu próbkowania. Odstępu próbkowania dla danej transmitancji nie można
zmieniać inaczej niż za pomocą wyjścia do trybu analogowego "ANALOG" i powtórnej
konwersji na tryb cyfrowy "DIGITAL" z nowym odstępem próbkowania.
Postać analityczną transmitancji można przedstawić w formie wyeksponowania zer i biegunów
"FZF", stałych czasowych "TCF", ułamków prostych "PFE".
Wartość czasu opóźnienia rzeczywistego "DELAY" wprowadza się dla wszystkich
analizowanych transmitancji. Powrót do układu bez czasu opóźnienia następuje po ponownym
wprowadzeniu "DELAY" z czasem "0".
Za pomocą "TIME" dla układów analogowych i "DTIME" dla układów dyskretnych otrzymuje
się odpowiedzi czasowe skokowe i impulsowe zarówno układu otwartego jak i zamkniętego.
Analizę w dziedzinie częstotliwości poprzedzić musi obliczenie transmitancji
częstotliwościowej, inicjowane poleceniem "FREQUENCY", dla której należy określić granice
częstotliwości i liczbę punktów, w których oblicza się wartości transmitancji. Wyniki tego
obliczania umieszczone są w pliku o domyślnej nazwie FREQ i służą jako dane do wykreślania
charakterystyk częstotliwościowych (polecenia BODE, NYQUIST, NICHOLS). Dalsza analiza
następuje tylko dla transmitancji, dla której ostatnio obliczono wartości w dziedzinie
częstotliwości, a zatem nie jest potrzebne podawanie za każdym razem nazwy transmitancji.
Raz wprowadzone i oznaczone unikalną nazwą transmitancje zapisywane są na dysku w postaci
zestawu współczynników. Możliwe jest ich ponowne wykorzystanie, aż do momentu
wprowadzenia pod tą samą nazwą innych transmitancji.
Zgłoszenie programu po uruchomieniu:
CC>
- prompt dla trybu analogowego (transformata Laplace’a)
DIG>
- prompt dla trybu impulsowego (transformata Z)
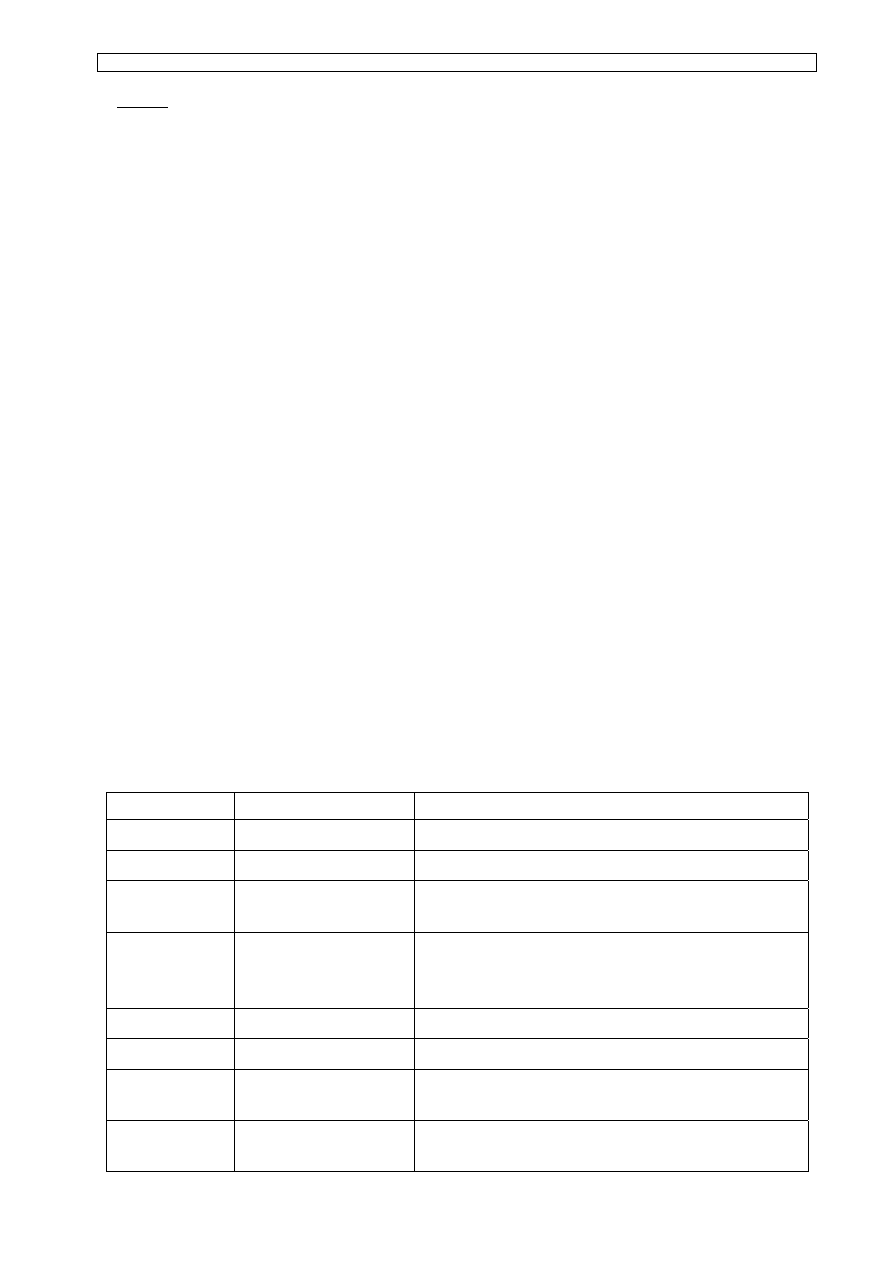
Tabela 1. Najważniejsze polecenia programu CC
Polecenie Parametry
Opis
ANALOG
przełączenie w tryb analogowy
DIGITAL [,Tp]
przeł. w tryb impulsowy (Tp – czas próbkowania)
ENTER
wprowadzenie dowolnej transmitancji wybranej z
listy
GENTER [Ki,licznik,mianown.]
wprowadzenie transmitancji układu ciągłego,
wielomiany licznik i mianown. wprowadza się wg
wzorca podanego na ekranie
DENTER [Ki,licznik,mianown.]
wprowadzenie transmitancji układu impulsowego
CONVERT [,Ki,Kj,opcje,Tp] przejście na ekwiwalentną transmitancję dyskretną
ILT ,Ki
wyznacza odwrotną transformatę Laplace’a dla
funkcji operatorowej Ki
IZT Ki
wyznacza odwrotną transformatę Z dla funkcji
operatorowej Ki
Laboratorium Podstaw Automatyki
Modelowanie – dziedzina częstotliwości
- 3 -
TCF ,Ki
wyświetla transmitancję w postaci iloczynu członów
inercyjnych
PFE ,Ki
wyświetla transmitancję w postaci ułamków
prostych
PZF ,Ki
wyświetla transmitancję w formie zer i biegunów
DELAY ,time
wprowadzenie czasu opóźnienia
TIME [,Ki,typ,AUTO]
wykreśla odpowiedź czasową układu o podanej
transmitancji
FREQUENCY [,Ki,low,high,#pts,typ] tworzy plik z punktami do wykreślenia
charakterystyk częstotliwościowych układu Ki
low, high – dolna, górna częstotliwość
#pts – ilość punktów na wykresie
typ - ozn. rodzaj skali częstotliwości
BODE [,typ,AUTO] wykreśla ch-kę częstotliwościową w układzie
Bodego
ASYMPTOTE [Ki,type,AUTO]
wykreśla ch-ki częstotliwościowe asymptotyczne
NYQUIST
wykreśla ch-kę częstotliwościową w układzie
Nyquista
NICHOLS
wykreśla ch-kę częstotliwościową w układzie
Nicholsa
ROOT LOCUS
podaje położenie biegunów transmitancji
CLS
kasowanie ekranu tekstowego
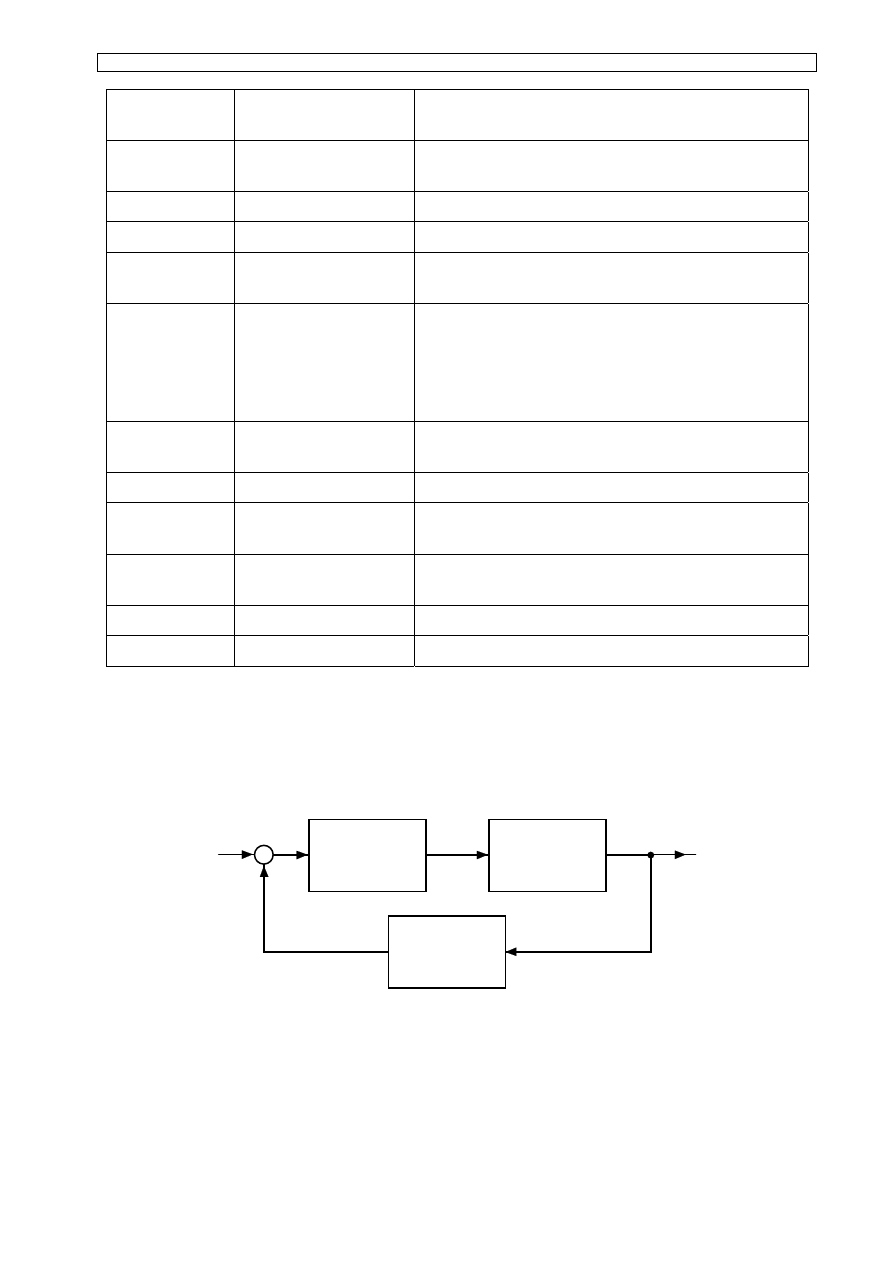
3. Program ćwiczenia
Przy wykorzystaniu charakterystyk częstotliwościowych analizowane są właściwości
zamkniętego układu regulacji pokazanego na rysunku 1 oraz poszczególnych jego elementów.
Dane i założenia przyjęte w kolejnych etapach analizy zawarto w tabeli 2.
+
-
Yz
Yp
Y
U
ε
Kr
Regulator
Ko
Obiekt
Kp
Układ
pomiarowy
Rys. 1. Schemat układu regulacji badanego w ćwiczeniu
W kolejnych wierszach tabeli przedstawiono różne sytuacje, które należy uwzględnić przy
analizowaniu układu regulacji. Dana jest transmitancja obiektu, zakłada się pożądaną
transmitancję całego układu lub regulatora, a poszukiwana jest odpowiednio transmitancja
regulatora lub zastępcza całego układu. Istotnym zagadnieniem jest zbadanie stabilności układu.
W tym celu, dla poszczególnych przypadków, analizowane są charakterystyki częstotliwościowe
Laboratorium Podstaw Automatyki
Modelowanie – dziedzina częstotliwości
- 4 -
K
otw
(s) otwartej pętli regulacji (metoda Nyquista) lub położenie biegunów transmitancji układu
zamkniętego.
Uwaga. Analogiczne układy regulacji badane są metodą modelowania w dziedzinie czasu – patrz
instrukcja „Modelowanie ciągłych i dyskretnych układów regulacji - Badania w dziedzinie
czasu”
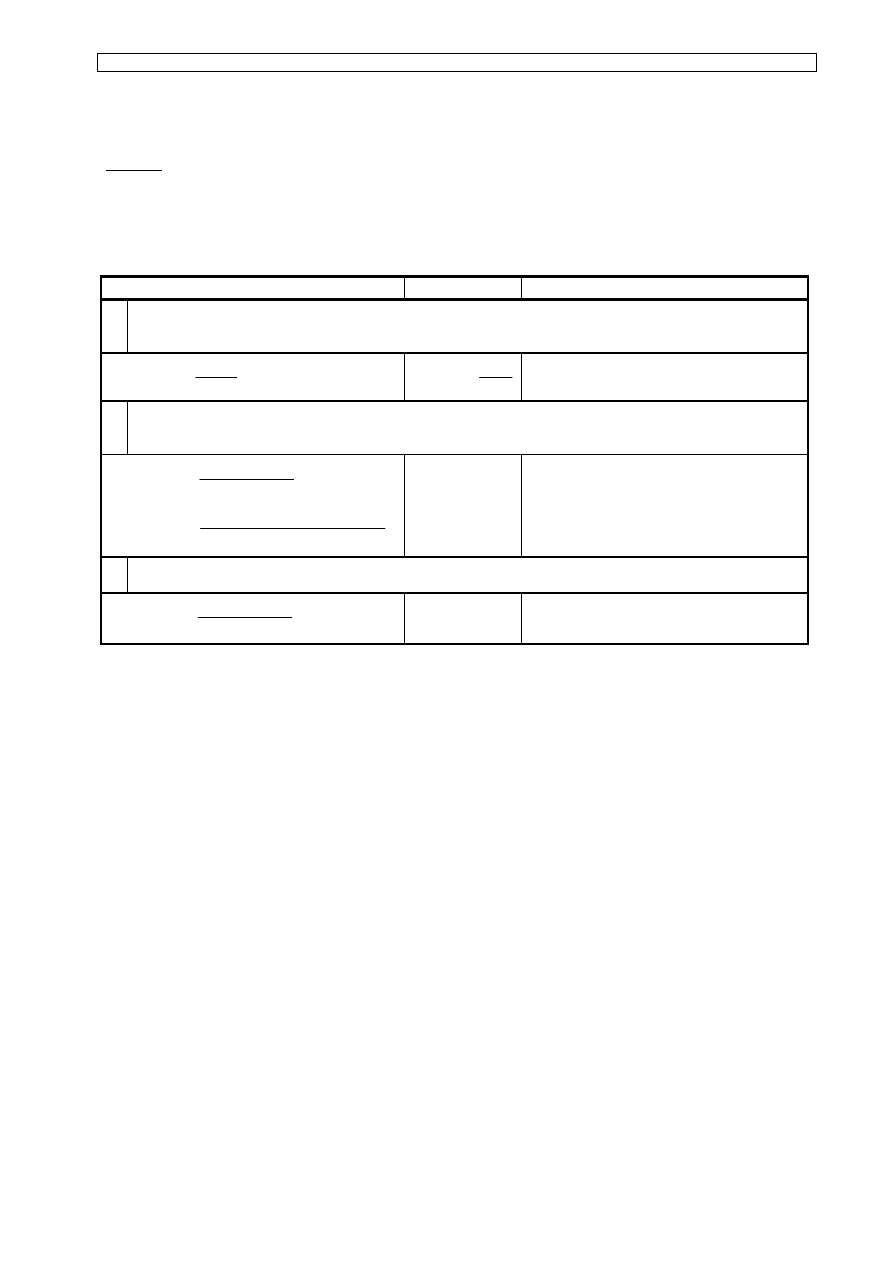
Tabela 2.
Dane Założone Poszukiwane
1 Transmitancja obiektu uzyskana w wyniku uproszczonej identyfikacji na podstawie odpowiedzi skokowej.
Zakłada się skrócenie czasu odpowiedzi układu zamkniętego w stosunku do czasu odpowiedzi obiektu. Należy
zaprojektować odpowiedni regulator.
( )
1
1
1
+
=
s
s
K
Z
( )
(
s
K
s
K
otw
R
1
1
,
( )
1
5
1
1
+
=
s
s
K
O
)
2 Rzeczywista transmitancja obiektu różni się od przyjętej w punkcie poprzednim (np. wskutek błędu w
identyfikacji) i opisana jest zależnością (a) lub (b). Zastosowano jednak regulator zaprojektowany w
poprzednim punkcie. Należy zbadać jak w tej sytuacji zachowuje się układ.
(a)
( ) ( )( )
1
1
4
1
2
+
+
=
s
s
s
K
O
(b)
( )
(
)
(
)
1
095
0
1
0
1
5
1
2
2
+
+
+
=
s
.
s
,
s
s
K
O
( )
s
K
R1
( )
(
s
K
s
K
otw
Z
2
2
,
)
dla (a) i (b)
3
Przyjmując założenie jak w punkcie 1 i uwzględniając rzeczywistą transmitancję obiektu (punkt 2a lub 2b)
zaprojektowano nowy regulator K
R2
( ) ( )( )
( )
s
K
Z1
( )
(
s
K
s
K
otw
R
3
2
,
)
1
1
4
1
2
+
+
=
s
s
s
K
O
W trakcie ćwiczenia należy:
a) wyznaczyć poszukiwane transmitancje,
b) wykreślić charakterystyki częstotliwościowe Bodego, asymptotyczne i Nyquista
poszczególnych elementów, całego układu oraz otwartych pętli regulacji
c) wyznaczyć położenie biegunów transmitancji poszczególnych elementów w celu
sprawdzenia ich stabilności
W sprawozdaniu skomentować uzyskane wyniki uwzględniając spodziewany charakter
odpowiedzi skokowej układu, stabilność układu, spełnienie założenia o skróceniu czasu
odpowiedzi. Porównać charakterystyki częstotliwościowe kolejnych modeli obiektu.
Wykorzystując odpowiednie charakterystyki częstotliwościowe wyznaczyć graficznie parametry
poszczególnych elementów i porównać je z wartościami wynikającymi z analitycznych postaci
transmitancji tych elementów.
Powyższy program ćwiczenia należy traktować jako przykładowy. Prowadzący zajęcia
może zaproponować inny program.
4. Pytania kontrolne.
1. Omówić pojęcia transmitancji operatorowej i widmowej (częstotliwościowej) układu. Na
czym polega różnica między nimi?

Laboratorium Podstaw Automatyki
Modelowanie – dziedzina częstotliwości
- 5 -
2. Jaki są sposoby wykreślania charakterystyk częstotliwościowych?
3. Naszkicować charakterystyki częstotliwościowe podstawowych układów dynamicznych.
4. Jak wykorzystać charakterystyki częstotliwościowe do określenia odpowiedzi ustalonej
układu na sygnały harmoniczne, okresowe nieharmoniczne?
5. Czy możliwe jest określenie odpowiedzi układu na skokową zmianę amplitudy sygnału
harmonicznego? W jaki sposób?
6. Jak określić stabilność układu na podstawie charakterystyk częstotliwościowych?
7. Co to jest wskaźnik regulacji? Jak wyznaczyć przebieg wskaźnika regulacji na podstawie
charakterystyk częstotliwościowych układu?
(HUk), plik: Sym_F_27-01.doc
Document Outline
- DIG> - prompt dla trybu impulsowego (transformata Z)
- Parametry
- Opis
- ANALOG
- DIGITAL
- ENTER
- wprowadzenie dowolnej transmitancji wybranej z listy
Wyszukiwarka
Podobne podstrony:
Modelowanie układów regulacji., Automatyka
SYM T 27-01.DOC, MODELOWANIE CIĄGŁYCH I DYSKRETNYCH UKŁADÓW REGULACJI
cwiczenie 4 modelowanie dyskretnych ukladów regulacji
modelowanie ciągłych i dyskretnych układów regulacji
Modelowanie ciągłych i dyskretnych układów regulacji w dziedzinie czasu by Gabcio
pais modelowanie obiektów ciągłych i dyskretnych układów regulacji
8 ocena jakości układów regulacji
Metoda projektowania układów regulacji za pomocą linii pierwiastkowych
Korekcja liniowych układów regulacji
L2 PAA Modelowanie układu regulacji automatycznej z wykorzystaniem pakietu MATLAB Simulink(1)
modelowanie ukladow przelaczaja Nieznany
Modelowanie układów mechanicznych
cw 7?danie ukladow regulacji dwupolozeniowej
08 Ocena jakości liniowych układów regulacji
IMW W03 Modelowanie ukladow id Nieznany
więcej podobnych podstron