1
00503 Kinematyka D
TEORIA
00503
Podstawy kinematyki D
Część 3
Przyspieszenie.
Droga i prędkość w ruchu jednostajnym.
Wektorowy charakter prędkości
i przyspieszenia.
Twierdzenie o prędkości i drodze
Instrukcja dla zdającego
1.
Proszę sprawdzić, czy arkusz teoretyczny zawiera 10
stron. Ewentualny brak należy zgłosić.
2.
Do arkusza może być dołączona karta wzorów i sta-
łych fizycznych. Jeśli jest, należy ją dołączyć do od-
dawanej pracy.
3.
Proszę uważnie i ze zrozumieniem przeczytać zawar-
tość arkusza.
4.
Proszę precyzyjnie wykonywać polecenia zawarte w
arkuszu: rozwiązać przykładowe zadania, wyprowa-
dzić wzory, gdy jest takie polecenie.
5.
Proszę analizować wszelkie wykresy i rysunki pod
kątem ich zrozumienia.
6.
W trakcie obliczeń można korzystać z kalkulatora.
7.
Wszelkie fragmenty trudniejsze proszę zaznaczyć w
celu ich późniejszego przedyskutowania.
8.
Uzupełniaj wiadomości zawarte w arkuszu o informa-
cje zawarte w Internecie i dostępnej ci literaturze.
9.
Znak * dotyczy wiadomości wykraczających poza
ramy programu „maturalnego”.
ś
yczymy powodzenia!
(Wpisuje zdający przed rozpoczęciem pracy)
PESEL ZDAJĄCEGO
Aktualizacja
Kwiecień
ROK 2008
Dane osobowe właściciela arkusza
2
00503 Kinematyka D
TEORIA
Temat: 9 Przyspieszenie w ruchu prostoliniowym.
1.
Wszyscy w jakościowy sposób rozumiemy co to jest przyspieszenie. Możemy wywołać
przyspieszenie samochodu naciskając pedał gazu. Im więcej pedał ten naciskamy, tym
większe jest przyspieszenie. Gdy trwa przyspieszenie prędkość rośnie, a oparcia siedzeń
popychają plecy pasażerów. Ta ilość popychania jest ilościową miarą przyspieszenia. Na-
ciśniecie na pedał hamulca daje ten sam efekt, tyle tylko, że teraz mamy ujemne przyspie-
szenie (nazywane opóźnieniem). Przyspieszenie jest miarą zmiany prędkości.
2.
Przyspieszenie jednostajne. Z definicji ciało porusza się z jednostajnym, czyli stałym
przyspieszeniem, gdy jego prędkość rośnie jednostajnie z czasem. Przyspieszenie a jest
stałe, gdy:
(1)
v v
0
= a·t, czyli:
(2) a
v
v
t
=
−
0
, gdzie v - v
0
jest przyrostem prędkości
w czasie t.
3.
Przyspieszenie chwilowe. Jeżeli przyspieszenie zmienia się z czasem, musimy wtedy
mierzyć zmianę prędkości
∆
v w ciągu krótkiego czasu
∆
t. Wtedy:
(3) a
v
t
dv
dt
t
=
=
→
∆
∆
∆
0
lim
4.
Przyspieszenie grawitacyjne. Jest godnym uwagi faktem doświadczalnym, że w pobliżu
powierzchni Ziemi każdy przedmiot upuszczony swobodnie spada ku środkowi Ziemi z
przyspieszeniem równym:
g
m
s
=
9 81
2
,
Zadziwiające jest, że to przyspieszenie jest niezależne od masy ciała, jego składu ani prędko-
ś
ci (chyba, że jest znaczny opór powietrza, wtedy przyspieszenie będzie mniejsze).
Suplement*:
Wartość 9 81
2
,
m
s
jest wartością przybliżoną.
Przy uwzględnianiu dalszych cyfr znaczących ujawnia się zależność g od szerokości geogra-
ficznej i wysokości punktu nad poziomem morza, w szczególności dla Nowego Jorku
g
m
s
=
9 82067
2
,
, dla Warszawy g
m
s
=
9 8123
2
,
.Będziemy zawsze przyjmować wielkość g jako
dodatnią. Jeżeli więc oś x skierujemy w górę, to przyspieszenie będzie równe a = -g.
3
00503 Kinematyka D
TEORIA
Temat: 10
Droga i prędkość w ruchu jednostajnym prostoliniowym.
1.
Jeżeli punkt materialny porusza się po linii prostej ruchem jednostajnym , to droga poko-
nywana w dowolnym czasie t, liczonym od chwili rozpoczęcia obserwacji (t
0
= 0), jest
wprost proporcjonalna do czasu trwania ruchu, co oznacza, że w równych, dowolnie ma-
łych odstępach czasu, punkt materialny przebywa równe drogi .
2.
Wiemy już, że stosunek dwóch wielkości, które są do siebie wprost proporcjonalne ma
wartość stałą. A więc i stosunek drogi s do odpowiadającego jej czasu t w ruchu jedno-
stajnym prostoliniowym ma wartość stałą. Zatem ruch jednostajny prostoliniowy, to ruch
odbywający się ze stałą prędkością (v = const. )
(1)
v
s
t
=
3.
Jeżeli punkt materialny porusza się ruchem jednostajnym prostoliniowym z prędkością v
w czasie t, to wartość przebytej drogi wyraża równanie:
(2)
s = v·t
zwane
równaniem ruchu jednostajnego prostoliniowego.
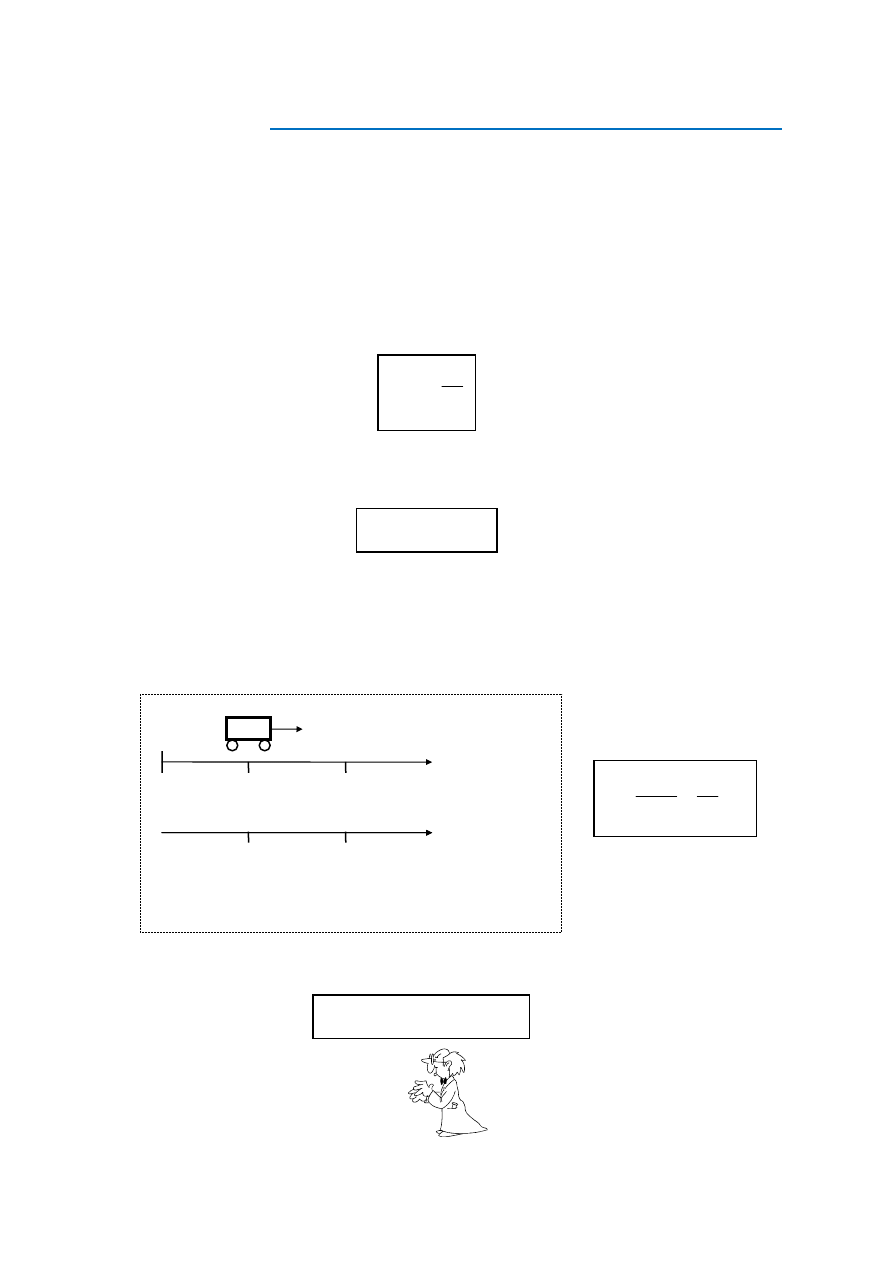
4.
Jeżeli obserwację ciała poruszającego się ruchem jednostajnym prostoliniowym rozpoczę-
to w chwili t
0
, w której znajdowało się ono w odległości s
0
od przyjętego punktu odnie-
sienia (rys. 1), to wartość prędkości określamy wzorem (3):
0
s
0
s droga [metr]
(3)
v
s
s
t
t
s
t
=
−
−
=
0
0
∆
∆
0
t
0
t czas [sekunda]
Rys. 1
5.
Ze wzoru (3) otrzymujemy bardziej ogólne równanie ruchu jednostajnego prostoliniowe-
go:
(4)
s
s
v t
t
= +
−
0
0
(
)
4
00503 Kinematyka D
TEORIA
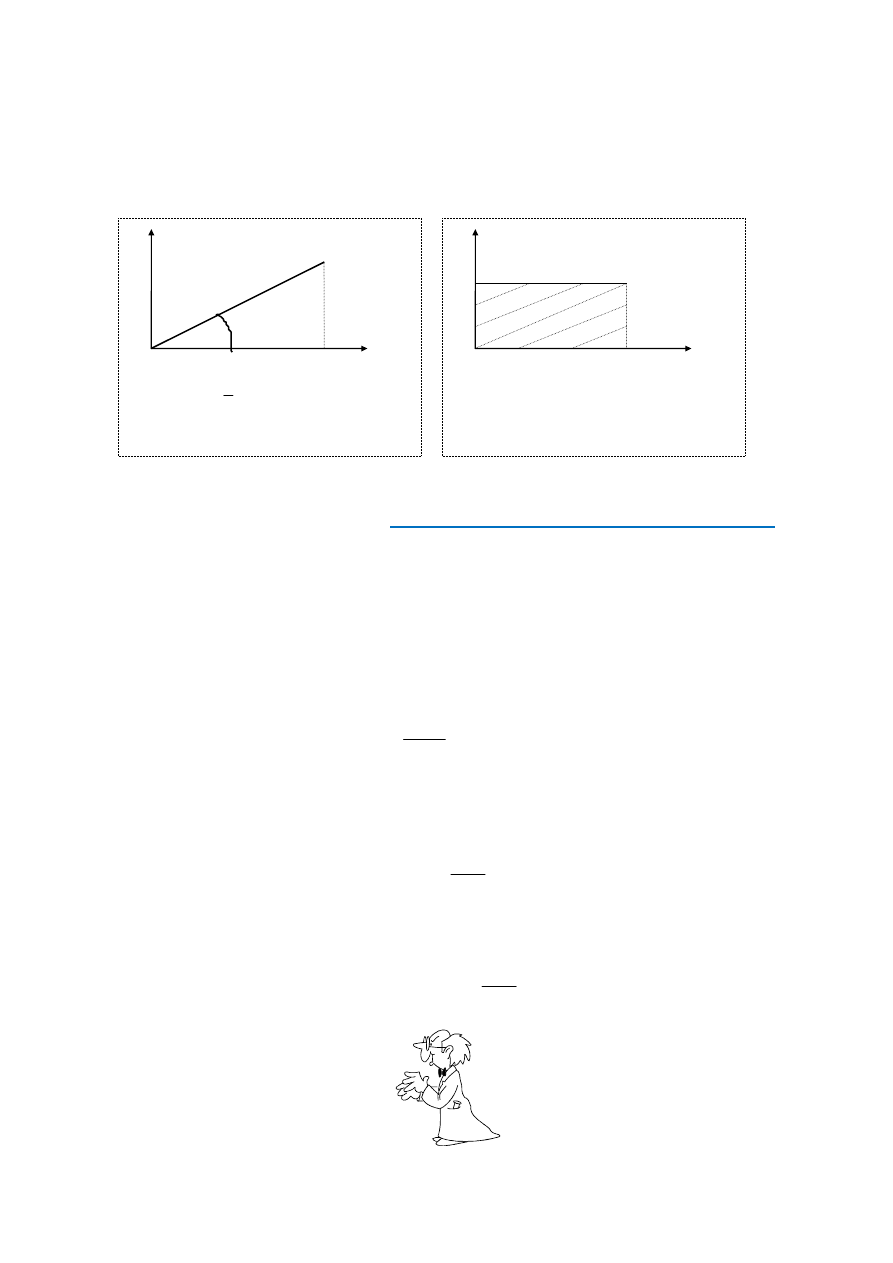
6.
Ruchy punktów materialnych mogą być ilustrowane graficznie za pomocą wykresów.
Najczęściej są stosowane wykresy prędkości w układzie współrzędnych v,t oraz drogi w
układzie współrzędnych s,t co przedstawiono na rysunkach 2 i 3.
S v
α
s = v·t
0 t 0 t
v
s
t
==
= tg
α
Rys. 2 rys. 3
Temat: 11
Ruch jednostajnie przyspieszony.
1.
Dotychczas korzystaliśmy ze związku, który określał nam jaka jest prędkość, gdy znamy
przyspieszenie i czas. Często jednak chcemy znać położenie punktu materialnego, a nie
jego prędkość. Chcemy więc uzyskać równanie, które wyraża drogę s przez przyspiesze-
nie a i czas t, a także przez prędkość początkową v
0
.
2.
Drogę przebytą ruchem prostoliniowym jednostajnie zmiennym w czasie t można wyrazić
graficznie jako pole trapezu OABC (rys. 1) Pole to ma wartość:
(1) s
v
v
t
=
+
0
2
Podstawiając zamiast v wyrażenie
(2)
v
v
a t
= + ⋅
0
,
mamy
(3)
s
v t
a t
= ⋅ +
⋅
0
2
2
3.
Jeżeli w chwili rozpoczęcia obserwacji punkt materialny przebył już drogę s
0
, wtedy
równanie ruchu jednostajnie zmiennego prostoliniowego przyjmuje postać:
(4)
s
s
v t
a t
= + ⋅ +
⋅
0
0
2
2
5
00503 Kinematyka D
TEORIA
Widzimy, że droga przebyta przez punkt materialny, który na początku był w spoczynku
i który ulega stałemu przyspieszeniu, rośnie jak kwadrat czasu.
v
v
0
Ruch jednostajnie przyspieszony,
to ruch, w którym w jednakowych
odstępach czasu punkt materialny
doznaje jednakowych przyrostów
prędkości.
0 t
Rys. 1
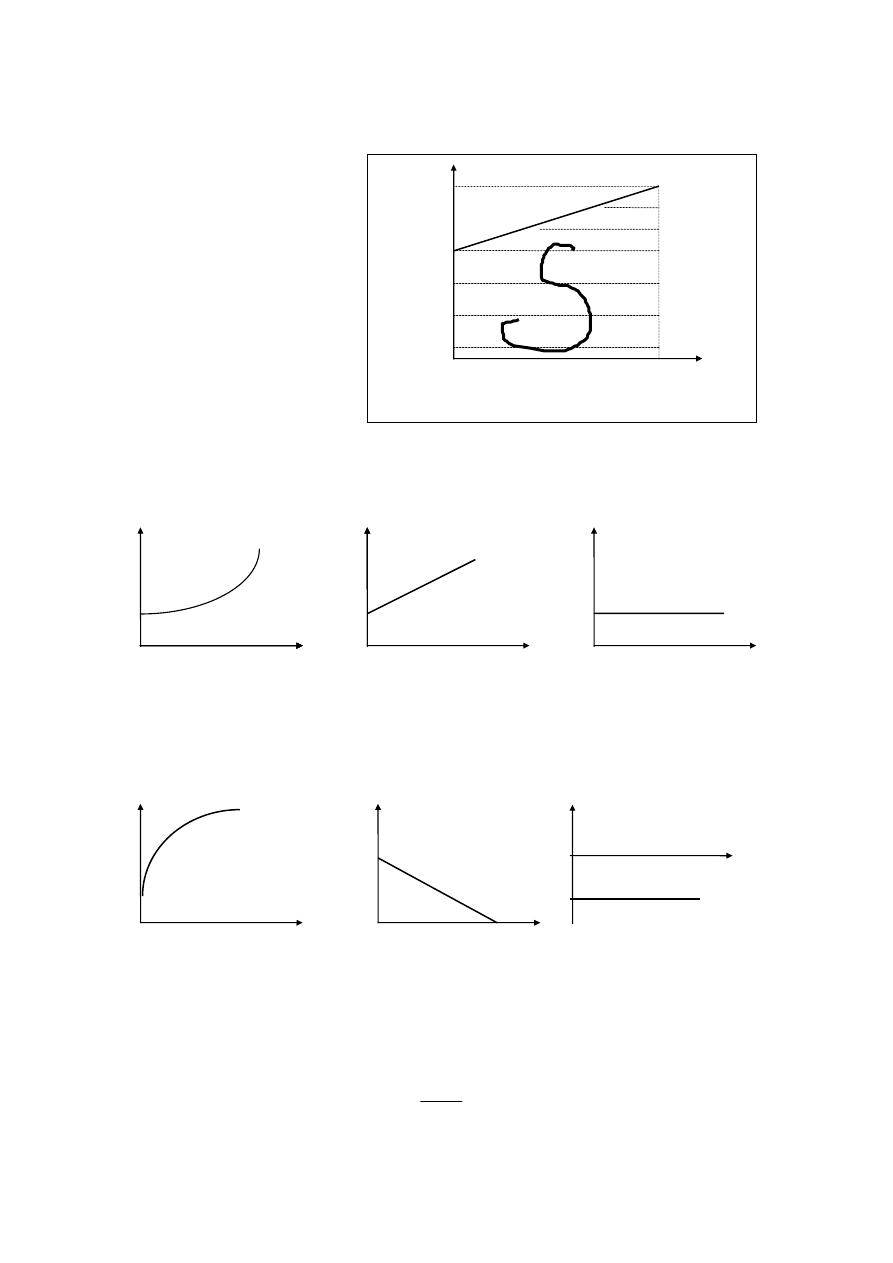
4.
Na rysunku 2 wykreślono równanie (4), na rysunku 3 - równanie (2), wreszcie na rysunku
4 przedstawiono zależność przyspieszenia od czasu w opisywanym rodzaju ruchu.
s v a
s
0
v
0
a
0
0 t 0 t 0 t
Rys. 2 Rys. 3 Rys. 4
O ile rysunki 2, 3 i 4 opisują graficznie
ruch jednostajnie przyspieszony, tak za pomocą
rysunków 5, 6 i 7 można zilustrować
ruch jednostajnie opóźniony:
s v a
v
0
0
t
s
0
-a
0 t 0 t
Rys. 5 Rys. 6 Rys. 7
5.
Związek między prędkością a odległością. Wygodnie jest nieraz znać zależność między
odległością i prędkością. Można to uzyskać rozwiązując równanie
(5)
a
v
v
t
=
−
0
6
00503 Kinematyka D
TEORIA
względem czasu t i podstawiając wynik do równania (4):
(6)
s
s
v
v
v
a
a
v
v
a
s
v
v
a
= + ⋅
−
+
⋅
−
= +
−
0
0
0
0
2
0
2
0
2
1
2
2
.
Zatem przy stałym a mamy:
(7)
v
v
a s
s
2
0
2
0
2
−
=
⋅ −
(
)
Często stawiać będziemy s
0
= 0
(8)
v
v
as
2
0
2
2
−
=
To warto wiedzieć:
⇒
ruch po linii prostej ze stałą prędkością opisuje równanie
s
s
v t
= + ⋅
0
,
⇒
*prędkość chwilowa wynosi
v
ds
dt
=
,
⇒
*przyspieszenie określamy według wzoru a
dv
dt
d s
dt
=
=
2
2
,
⇒
przy stałym przyspieszeniu, czyli a = const., mamy:
s
s
v t
at
o
= + ⋅ +
0
2
2
oraz
v
v
a s
s
2
0
2
0
2
−
=
⋅ −
(
) ,
7
00503 Kinematyka D
TEORIA
Temat:12 Wektorowy charakter prędkości i przyspieszenia.
1.
Wektor prędkości w ruchu prostoliniowym. Rozważając takie wielkości jak prędkość i
przyspieszenie należy pamiętać, że są to wielkości wektorowe. W ruchu prostoliniowym
prędkość jest oczywiście skierowana wzdłuż toru (rys. 1).
a A
r
v
B
Rys. 1
Prędkość w ruchu prostoliniowym jednostajnym jest stała zarówno co do wartości jak i
kierunku i zwrotu. W ruchu prostoliniowym zmiennym kierunek i zwrot wektora prędkości
jest stały, ale jego wartość ulega zmianie.
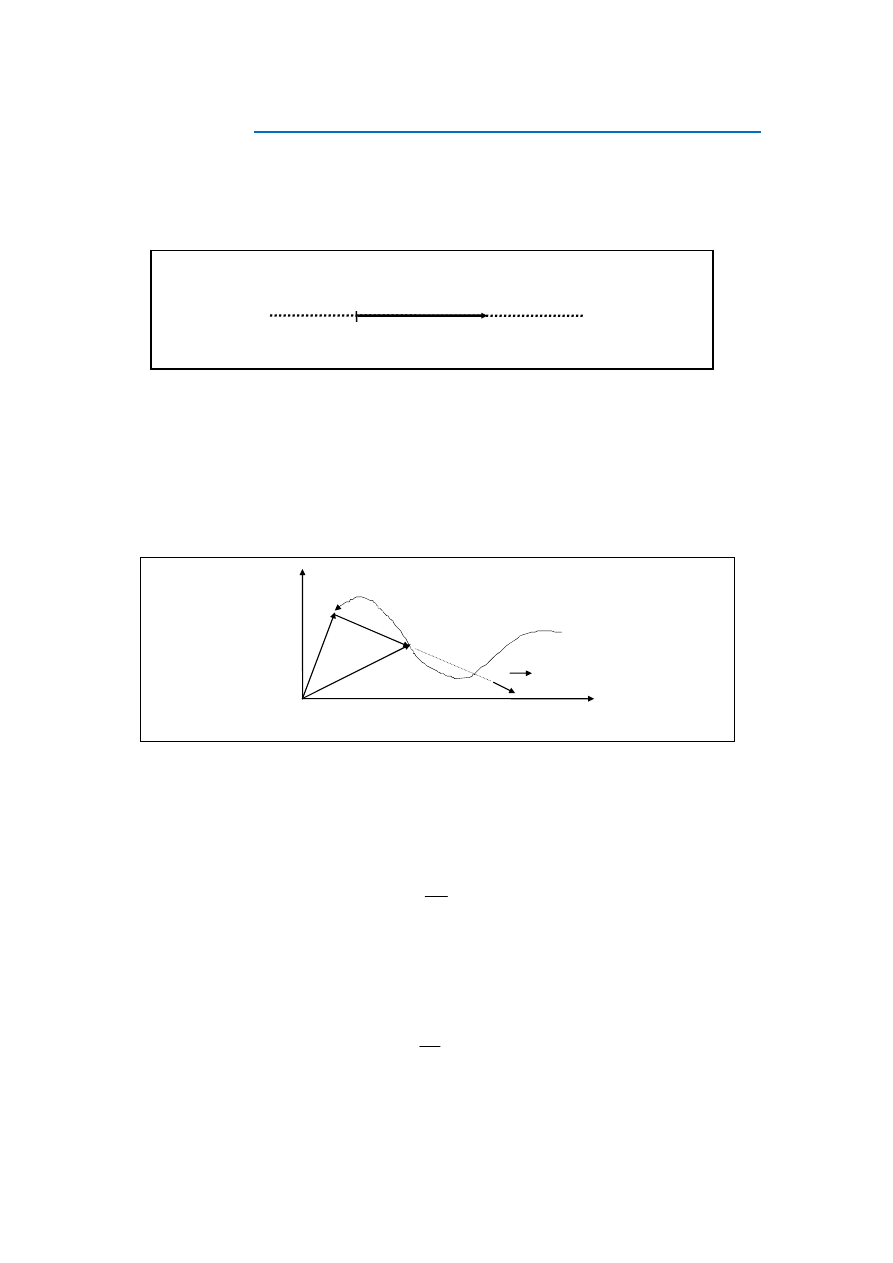
2.
Prędkość w ruchu krzywoliniowym. Stopniując trudności w rozważaniach kinematycz-
nych przejdziemy od ruchu prostoliniowego do krzywoliniowego płaskiego. Rozpatrzmy
ruch krzywoliniowy płaski przedstawiony na rysunku 2.
y
A
∆
s
B
r
r
1
Rys. 2
r
r
2
v
O
x
Niech wektory
r
r
1
i
r
r
2
przedstawiają promienie wodzące odpowiednio w chwilach t
1
i t
2.
Wektor
∆
r
r
r
r
r
r
= −
2
1
jest przyrostem wektora promienia wodzącego w czasie
∆
t = t
2
- t
1
.
Długość tego wektora tym mniej różni się od długości przebytej drogi s, im krótszy jest
czas obserwacji
∆
t (rys. 2). Wyrażenie:
(1)
r
r
v
r
t
=
∆
∆
przedstawia wektor prędkości średniej zgodny co do kierunku z wektorem
∆
r
r
.
Analogicznie jak poprzednio, wektor prędkości chwilowej w ruchu krzywoliniowym
( i w każdym innym ruchu) wyrażamy jako:
(2)
r
r
v
dr
dt
ch
=
8
00503 Kinematyka D
TEORIA
Zatem wektor prędkości chwilowej w danym punkcie toru jest wektorem stycznym z krzywą
określającą tor w tym punkcie (rys. 3).
r
v
1
Rys. 3
r
v
2
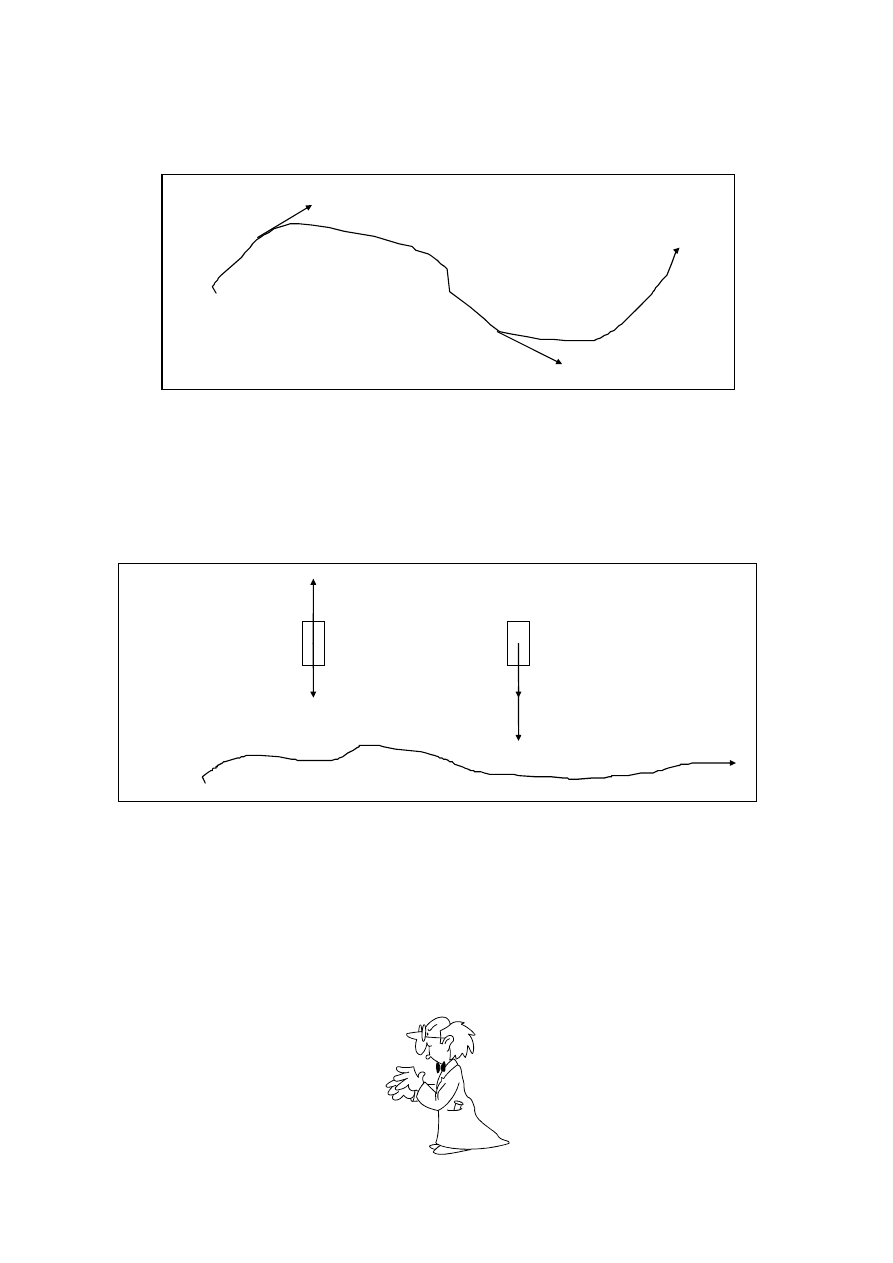
3.
Przyspieszenie w ruchu prostoliniowym. W ruchu prostoliniowym zmiennym występuje
przyspieszenie mające zwrot zgodny ze zwrotem prędkości w ruchu przyspieszonym, a
przeciwny w ruchu opóźnionym. Tak na przykład w rzucie pionowym do góry prędkość
jest stale skierowana pionowo w górę, a przyspieszenie (grawitacyjne) - stale pionowo w
dół. Podczas swobodnego spadku ciała prędkość i przyspieszenie są skierowane zgodnie
w dół (rys. 4).
r
v
a) b)
Ciało porusza się zaczyna spadać
pionowo do góry pionowo w dół.
i ...
r
g
r
v
r
g
Rys. 4
Powierzchnia Ziemi
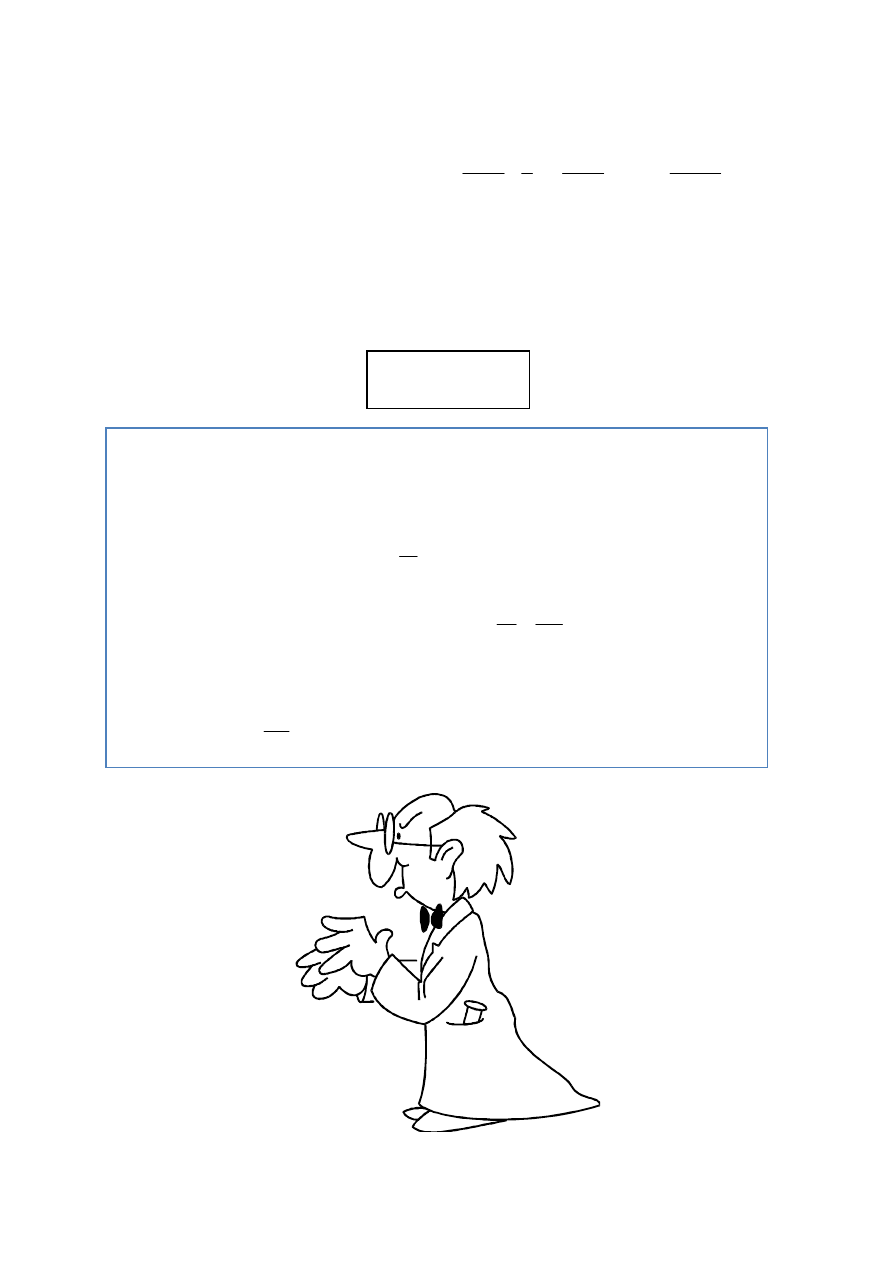
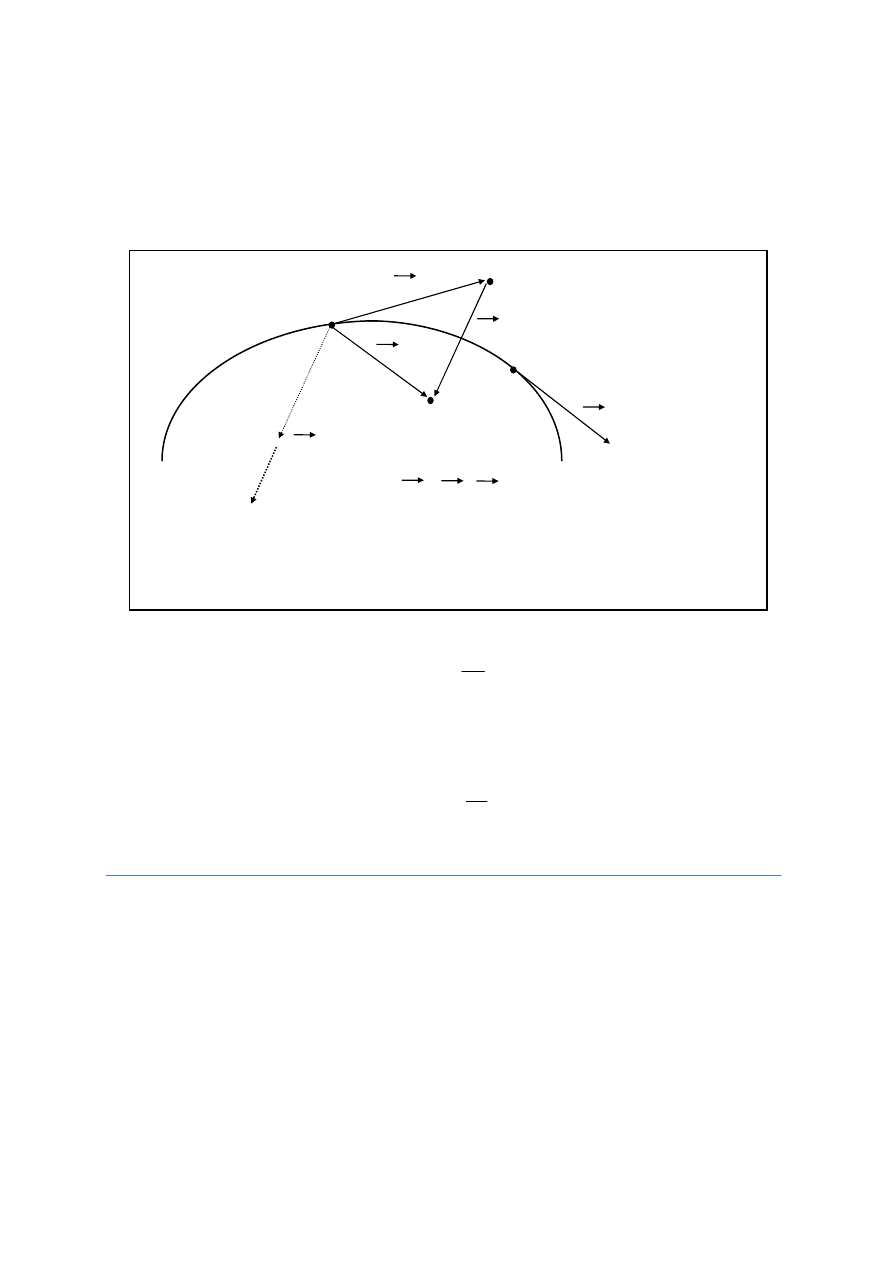
4.
Przyspieszenie w ruchu krzywoliniowym. W ruchu krzywoliniowym jednostajnym dłu-
gości wektorów prędkości w różnych punktach toru są jednakowe, kierunki ich jednak
ciągle zmieniają się, czyli nawet w ruchu krzywoliniowym jednostajnym wektor prędko-
ś
ci nie jest stały.
Zatem w każdym ruchu krzywoliniowym (jednostajnym i niejedno-
stajnym) można wyznaczyć wektorowy przyrost prędkości, a co za tym idzie przy-
spieszenie. Sposób określania graficznego przyspieszenia pokazuje rysunek 5. Widać, że
wektor przyspieszenia średniego różni się od przyspieszenia chwilowego zarówno warto-
ś
cią, kierunkiem, jak i zwrotem.
9
00503 Kinematyka D
TEORIA
Wniosek:
Prędkość stała oznacza, że przyspieszenie jest równe zeru, lecz stała wartość
prędkości może lub nie odpowiadać przyspieszeniu równemu zeru .Prędkość ciała poruszają-
cego się po krzywej ze stałą co do wartości prędkością zmienia jednak kierunek i zwrot, a
więc ma ono przyspieszenie. Działanie przyspieszenia odczuwamy, np. gdy samochód mija
szybko zakręt.
v
1
A
∆
v
v
2
B
v
2
∆
v
r
a
∆
v = v
2
- v
1
Rys. 5
Wyrażenie:
(3)
r
r
a
v
t
=
∆
∆
przedstawia wektor przyspieszenia średniego zgodny co do kierunku z wektorem
∆
r
v
.
Z kolei wektor przyspieszenia chwilowego wyrazimy za pomocą wzoru (4):
(4)
r
r
a
dv
dt
=
Koniec

10
00503 Kinematyka D
TEORIA
Notatki
Wyszukiwarka
Podobne podstrony:
00504 Kinematyka D part 4 2008 teoria ruch w polu Ziemi i po okręgu(1)
00502 Kinematyka D part 2 2008 teoria opis ruchu, prędkość w ruchu prostoliniowym(1)
00501 Kinematyka D part 1 2008 teoria wektory, układ SI(1)
00508 Bryła sztywna D part 1 2008 teoria kinematyka bryły(1)
3 RUCH JEDNOSTAJNIE ZMIENNY
Ruch jednostajnie zmienny
ruch jednostajnie zmienny, AGH górnictwo i geologia, II SEM, Fizyka I, ćwiczenia
00506 dynamika D part 2 2008 teoria siły kontaktowe i dośrodkowe, pęd, równia(1)
00509 Bryła sztywna D part 2 2008 teoria dynamika bryły(1)
00505 dynamika D part 1 2008 teoria zasady dynamiki(1)
4. Ruch prostoliniowy jednostajnie zmienny, Fizyka
Zadania Ruch jednostajnie prostoliniowy Ruch prostoliniowy jednostajnie zmienny
Ruch prostoliniowy jednostajnie zmienny, fizyka(1)
Nowy Mendel cz1 KINEMATYKA RUCH JEDNOSTAJNY
17 Ruch prostoliniowy jednostajnie zmienny doświadczenie
ruch jednostajny, Fizyka
ruch jednostajny, AGH górnictwo i geologia, II SEM, Fizyka I, ćwiczenia
więcej podobnych podstron