ZASADY STATYKI
0≤ M ≤
T QR=Nf
Prawo superpozycj i: m a = P 1 + P 2 + ... + P n przyśpieszenie punktu
Przyrost krętu ciała materialnego względem dowolnego bieguna
1. Zasada równoległoboku – dwie siły przyłożone do jednego punktu
materialnego na który działają siły P 1... P n równe jest sumie wywołamy działaniem siły chwilowej jest równy momentowi jej
możemy zastąpić jedną siłą wypadkową, która jest przekątną
Tarcie pasów o koła
geometrycznej przyśpieszeń, które miałby ten punkt gdyby każda siła
impulsu względem przyjętego bieguna.
równoległoboku zbudowanego na tych wektorach
αµ
S=S
działała z osobna
1e
; α- kąt opasania; S,S1 – siła naciągu pasa
2. Dwie siły przyłożone do ciała sztywnego są w równowadze gdy
PRĘT
Bezwładnościowy układ odniesienia – układ względem którego
Uderzenie proste – przypadek w którym prędkości punktów
działają wzdłuż jednej prostej i mają te same wartości, ale przeciwne
Pręt – bryła której jeden wymiar wyraźnie dominuje nad pozostałymi.
obowiązują prawa dynamiki Newtona. Każdy układ odniesienia
stykających się ciał leżą na jednej prostej normalnej do powierzchni
zwroty. Układ taki nazywamy zerowym.
Pręt powstaje w wyniku przesuwania figury płaskiej A wzdłuż
poruszający się względem układu bezwładnościowego jednostajnym
obu ciał.
3. Działanie układu sił nie ulegnie zmianie, gdy do układu tego
krzywej k, tak że figura pozostaje zawsze prostopadła do krzywej k, a
ruchem postępowym jest także układem bezwładnościowym.
Uderzenie środkowe – jeżeli normalna uderzeniowa przechodzi przez
dodamy układ wzajemnie równoważących się sił.
jej środek ciężkości zawsze znajduje się na krzywej k. Figurę płaską
Zasada krętu – pochodna wektora krętu względem czasu t jest równa
środek mas uderzających o siebie ciał.
4. Zasada zesztywnienia działanie układu sił nie ulegnie zmianie przez
nazywamy przekrojem normalnym pręta a krzywą k – osią pręta.
momentowi siły działającej na punkt materialny obliczanego
zesztywnienie ciała na które działają te siły.
T- siła poprzeczna
względem tego samego punktu co kręt.
Hipoteza Poissona – Impuls s ’’ odpowiadający drugiemu okresowi 5. Każdemu działaniu towarzyszy równe co do wartości o przeciwnym
N – siła normalna
d K 0/dt = M 0
uderzenia (prędkości są sobie równe siła wzajemnego oddziaływania
zwrocie i leżące na tej samej prostej przeciwdziałanie.
M
Zasada zachowania krętu – jeżeli w pewnym okresie czasu moment
maleje do 0) związany jest z impulsem s’ odpowiadającemu
s – moment skręcający
6. Zasada oswobodzenia z więzów – każde ciało nieswobodne można
M
siły działającej na punkt materialny jest stale równy 0, wówczas kręt
pierwszemu okresowi uderzenia (rozpoczynającym się w momencie
g – moment gnący
oswobodzić z więzów zastępując je reakcjami. Wówczas można
jest stały.
zetknięcia, aż do momentu w którym prędkości na skutek
rozpatrywać takie ciało jako swobodne znajdujące się pod działaniem
Siłą normalną w przekroju aa nazywamy sumę rzutów wszystkich sił
Zasada względności mechaniki klasycznej – Za pomocą żadnych
odkształceniom nie zrównają się) związkiem:
sił sztywnych i biernych.
znajdujących się po jednej stronie przekroju na kierunek normalny do
zjawisk
mechanicznych
nie
możemy
wykazać
istnienia
przekroju (dodatnia jeżeli powoduje rozciąganie).
prostoliniowego
jednostajnego
ruchu
postępowego
układu
s’’ = k * s’ k – współczynnik restytucji wyznaczmy na podstawie
Momentem siły P względem punktu 0 nazywamy iloczyn wektorowy
Siłą poprzeczną w przekroju aa nazywamy sumę wszystkich sił
odniesienia.
doświadczeń
tej siły przez promień – wektor łączący 0 z dowolnym punktem na
znajdujących się po jednej stronie przekroju (względem jego środka
k=1 dla ciał doskonale sprężystych
linii działania tej siły.
ciężkości) na kierunek prostopadły do osi przekroju.
PRACA, MOC, ENERGIA
Momentem siły P względem osi l nazywamy rzut wektora momentu
Moment zginający przekroju aa nazywamy rzut wektora momentu
Więzy – czynniki ograniczające ruch ciała
siły obliczonego względem dowolnego punktu na osi l na kierunek tej
będącego sumą momentów wszystkich sił znajdujących się po jednej
Praca mechaniczna – praca siły stałej na drodze prostoliniowej,
Reakcje – siły oddziaływania więzów
siły.
stronie przekroju na kierunek styczny do przekroju (dodatni gdy
kierunek działania siły pokrywa się z drogą.
Klasyfikacja więzów :
powoduje wygięcie wypukłe w dół).
Przesunięcie elementarne – nieskończenie mały wektor d s o Geometryczne - równanie więzów zawiera tylko współrzędne punktów
Para sił to układ sił równoległych o tych samych wartościach
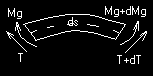
Tw.
Schwedlera.
pochodna
momentu
gnącego
względem
wielkości równej różniczce łuku drogi.
Kinematyczne - równanie więzów zależy od prędkości
liczbowych lecz zwrotach przeciwnych.
współrzędnej pokrywającej się z osią pręta jest równa sile poprzecznej
d s = dx i +dy j + dz k
Reonomicze, niestacjonarne - zależy od czasu
Własności
d M
Elementarną praca siły zmiennej P na elementarnym przesunięciu d s
Skleronomiczne, stacjonarne - niezależne od czasu
g/ ds. =T; d2M.g/dx2=dT/dx=-q; q – gęstość obciążenia
-moment pary sił nie zależy od wyboru bieguna względem którego
KRATOWNICE
nazywamy iloczyn skalarny tej siły przez przesunięcie.
Auholonomiczne – zależne od prędkości
wyznaczamy i jest wartością stałą.
Pręt prosty nieobciążony na długości i zakończony przegubami to pręt
δL = P• ds ; δL =Pxdx + Pydy + Pzdz ; LAB = ∫AB(δL) = ∫AB(Pxdx +
Gładkie, idealne – więzy w których nie występują reakcje sztywne
-każdą parę sił działającą w dowolnej płaszczyźnie możemy zastąpić
przegubowy
Pydy + Pzdz)
Obustronne φj(x, y, z ... xn, yn, zn) = 0
inną parą sił działającą w tej samej płaszczyźnie o momencie równym
ϕ
Kratownica to układ pr
B
ętów przegubowych połączonych ze sobą
dla toru kołowego: δL = M0dϕ ; LAB = ∫ϕA (M0dϕ)
Jednostronne φj(x, y, z ... xn, yn, zn) =< 0, >= 0
momentowi pierwotnemu.
przegubami. Kratownica jest płaska jeśli pręty i obciążenia leżą w
Moc – praca odniesiona do jednostki czasu
Holonomiczne – niezależne od prędkości
-pary sił działające w jednej płaszczyźnie możemy zastąpić jedną parą
jednej płaszczyźnie
N = dW/dt = P*(d r/dt) = P• v
sił o momencie równym sumie momentów poszczególnych par sił
Warunek konieczny na to aby kratownica była geometrycznie
dla ruchu obrotowego: N = (M
ω
Współrzędne uogólnione – odpowiednio dobrane niezależne
0dϕ)/dt = M0
-pary sił działające w różnych płaszczyznach możemy zastąpić parą o
niezmienna – P=2W-3; P- pręty; W – węzły (przeguby)
Sprawność – stosunek pracy użytecznej do pracy włożonej
parametry pozwalające określić położenie nieswobodnego układu
momencie równym sumie geometrycznej momentów sił.
Metody wyznaczania sił w prętach kratownicy
L
materialnego. Ilość współrzędnych uogólnionych jest równa liczbie
c = Lµ + Lst - straty
analogiczne
η = (L
swobody układu.
µ/Lc) < 1
REDUKCJA DOWOLNEGO UKŁADU SIŁ
1)równoważenia węzłów – wycinamy węzły w kratownicach i
Zasada równoważności pracy i energii kinetycznej: Skończony
Przesunięcia możliwe – zgodne z więzami
M
n
o=Σa=1 M a – moment główny układu sił
piszemy warunki równowagi dla każdego z osobna
przyrost energii kinetycznej układu mechanicznego ciał materialnych
S=Σ
n
k=1 P k – wektor główny układu sił
z położenia o konfiguracji elementów A do położenia o konfiguracji
Przesunięcia przygotowane (wirtualne) – przesunięcia proporcjonalne
M 01= M 0- r× s - wzór Bosma (moment siły S względem bieguna O
elementów B jest równy sumie prac całkowitych układów sił
do prędkości możliwych (zgodnych z więzami).
gdzie r = OO 1)
zewnętrznych i zewnętrznych na tym przemieszczeniu
Praca przygotowana – elementarna praca siły P na przygotowanym
M •
2
2
przesunięciu jej punktu przyłożenia
O1 S= M O S=k=const Iloczyn momentu głównego względem mVB /2 – mVA /2 = LAB ; EkB – EkA = LAB
dowolnego punktu ciała i wektora głównego układu jest równy
Przyrost E
Zasada Lagrange’a-d’Alemberta (prac przygotowanych) – WKW
k w czasie od t1 do t2 jest równy pracy wykonanej przez siłę
iloczynowi mom. gł. układu względem bieguna redukcji O i jest stały
działającą na punkt materialny w tym samym czasie.
równowagi układu materialnego jest, aby suma prac przygotowanych
= k.
z wszystkich sił czynnych i reakcji więzów przy dowolnym
S jest pierwszym niezmiennikiem układu sił.
P O L A P O T E N C J A L N E
przesunięciu przygotowanym była równa zero.
n
k – parametr układu jest drugim niezmiennikiem układu sił.
2)przecięć Rittera – piszemy 3 warunki momentów (tylko 1
Pole wektorowe - ograniczony obszar w którym każdemu punktowi
Σ
δ
i=1 Pi ri = 0
niewiadoma)
przyporządkowano wektor.
Siły uogólnione - siły wykonujące pracę elementarną na
Skrętnik – wynik redukcji dla którego wektor momentu głównego M.O
wykreślne
Pole wirowe niezachowawcze, niepotencjalne – pola, w których
odpowiadającej współrzędnej uogólnionej
jest wektorem równoległym do wektora głównego S
1)Cremana
L
praca zależy od kształtu toru.
δL = Σ
δ
k=1 Qk qk Qj = d/dt( ∂Ek/∂qj) - ∂Ek/∂qj 2)Cluman
L
Siła uogólniona jest równa zmianie w czasie pochodnej E
AB = ∫AB(Pxdx + Pydy + Pzdz)
k układu
Oś centralna układu – prosta równoległa do wektora głównego S, na
Pole potencjalne – to pole sił, w którym praca nie zależy od drogi względem odpowiedniej prędkości uogólnionej, pomniejszonej o
której leżą wszystkie bieguny redukcji, względem których układ
KINEMATYKA
przejścia, lecz tylko od położenia punktu początkowego i końcowego.
pochodną Ek względem współrzędnej uogólnionej.
redukuje się do skrętnika.
Prędkości i przyspieszenia
Praca po linii zamkniętej w polu potencjalnym wynosi 0. Jeżeli
istnieje funkcja pola F(x,y,z), z której różniczka: dF = (∂F/∂x)dx +
Równanie Lagrange’a I rodzaju:
Równanie parametryczne osi centralnej
f
(∂F/∂y)dy + (∂F/∂z)dz , to pole nazywamy potencjalnym.
R
λ
ix = Σj=1
j*( ∂Fj/∂xj) = mix’’i - xi
(M
f
x-(ySz-zSy))/Sx= (My-(zSx-xSz))/Sy= (Mz-(xSy-ySx))/Sz
Potencjał pola sił – taka skalowana funkcja położenia V(x,y,z), której
R
λ
iy = Σj=1
j*( ∂Fj/∂yj) = miy’’i - yi
f
pochodne cząstkowe podług odpowiednich kierunków są równe
R
λ
iz = Σj=1
j*( ∂Fj/∂zj) = miz’’i - zi
TABLICA REDUKCJI
składowym siły pola w tych kierunkach wziętych ze znakiem „-”.
S
M.O
K
Wynik
Miejsce geometryczne punktów, w których funkcja V przyjmuje
Równanie Lagrange’a II rodzaju:
S≠0
M. ≠
jednakową wartość, nazywamy powierzchnią izoskalarną, lub
Q
O 0
K≠0
Skrętnik lub 2 siły równoległe
j = d/dt( ∂Ek/∂qj) - ∂Ek/∂qj j=1,2,,....,k
S≠0
M. ≠
ekwipotencjalną. Aby pole było potencjalne to: rot P = 0 ; rot P =
O 0
K=0
Wypadkowa
(∂P
Twierdzenie Vorginiona – moment siły wypadkowej dowolnego
S≠0
M.
z/∂y - ∂Py/∂z)i + (∂Px/∂z - ∂Pz/∂x)j + (∂Py/∂x - ∂Px/∂y)k
O=0
K=0
Wypadkowa
Zasada zachowania energii mechanicznej – w polu potencjalnym
układu sił względem dowolnego punktu równy jest sumie momentów
S=0
M. ≠
O 0
K=0
Para sił
V= d r/dt=d r/ds. * ds./dt=ds./dt * τ
suma energii kinetycznych i potencjalnej jest wartością stałą.
wszystkich sił składowych tego układu względem tego punktu.
S=0
M.O=0
K=0
Równowaga układu sił
| V|=ds./dt V=V*τ
E
Kr
kA + VA = EkB + VB
ęt k= r× p; k= r ×m V
a=d V/dt=d/dt(V*τ)=dV/dt * τ + V*dτ/dt
Wnioski dotyczące pól potencjalnych:
SZCZEGÓLNE UKŁADY SIŁ
a= d 2 s/dt2 * τ + V2/r * n
1)Potencjał jest to skalarna funkcja położenia, określona jako: gradV
Zbieżny układ sił – układ sił których linie działania przecinają się w
= - P
jednym punkcie. Jeżeli wszystkie siły układu zbieżnego leżą w jednej
Stopnie swobody – liczba niezale
2)Potencjał istnieje w polu, w którym: rot P = 0
żnych parametrów potrzebnych do
płaszczyźnie układ taki nazywamy płaskim zbieżnym układem sił.
określenia położenia ciała sztywnego w przestrzeni.
3)W polu potencjalnym praca elementarna jest równa różniczce
Każdy płaski układ sił można zredukować do wypadkowej
Ciało swobodne (nie poddawane działaniu więzów posiada 6 stopni
zupełnej potencjału ze znakiem „-” δL = -dV
M
n
0-(xΣi=1 Piy-Pix)=0 – równanie prostej działania wypadkowej
swobody) n = 6 – w . Funkcje określające położenie ciała nazywamy
4)Praca całkowita w polu potencjalnym jest równa różnicy
równaniami ruchu ciała sztywnego (ich ilość równa jest ilości stopni
potencjałów i nie zależy od kształtu drogi
Warunki równowagi płaskiego układu sił M.O=0 , S=0
swobody)
5)Praca całkowita w polu potencjalnym po torze zamkniętym jest
Ruch kulisty – taki ruch ciała sztywnego, podczas którego jeden jego
równa 0
Układ sił równoległych – układ sił których linie działania są do siebie
punkt pozostaje nieruchomy (środek ruchu kulistego). W ruchu
6)Siły pola są prostopadłe do powierzchni izoskalarnych
równoległe. Układ sił da się zredukować do wypadkowej k=0 lub pary
kulistym torami punktu ciała są krzywe, które leżą na powierzchniach
7)Siły pola są zwrócone od powierzchni wyższego potencjału do
sił gdy S=0. Środek sił równoległych to punkt zaczepienia ich
kul o promieniach równych odległościom tych punktów od punktu
powierzchni niższego potencjału.
wypadkowej
nieruchomego.
Pole stałe – pole, w którym siła jest stała co do kierunku, zwrotu i Środek sił równoległych – określa się jako współrzędne xs, ys, zs
v = ω × r ; a = ε × r
wartości.
xs=(ΣxiPi)/ ΣPi; ys==(ΣyiPi)/ ΣPi; zs=(ΣziPi)/ ΣPi;
Ruch obrotowy – ruch wokół prostej łączącej dwa nieruchome
Pole centralne (środkowe) – wielkość siły w dowolnym punkcie pola
zależy tylko od odległości od jego środka.
Moment statyczny punktu materialnego względem dowolnej
Moment bezwładności punktu materialnego względem płaszczyzny,
płaszczyzny to iloczyn masy tego punktu i jego odległości od
osi lub bieguna nazywamy iloczyn masy punktu przez kwadrat
płaszczyzny.
odległości tego punktu od danej płaszczyzny osi, czy bieguna.
Środek ciężkości to punkt w którym skupiona masa układu ma
Promień bezwładności – taka odległość od płaszczyzny, osi lub
względem dowolnej płaszczyzny lub osi taki sam moment statyczny
bieguna, której kwadrat pomnożony przez masę układu da nam jego
jak cały układ materialny
moment bezwładności.
Masa zredukowana – masa, która pomnożona przez kwadrat
TWIERDZENIA DOTYCZĄCE ŚRODKA MASY:
odległości od osi, płaszczyzny lub bieguna da nam moment
1)środek masy układu płaskiego leży w płaszczyźnie tego układu
bezwładności.
2)środek masy linii prostej leży na tej linii
punkty ciała sztywnego. Prostą nazywamy osią obrotu.
Momentem zboczenia (dewiacji) układu punktów materialnych
3)środek masy dwóch punktów materialnych leży na prostej łączącej
ω = dϕ/dt ; | aτ| = ε*r = [d2ϕ/dt2]*r | a n| = ω2*r ; v = ω × r
względem dwóch wzajemnie prostopadłych płaszczyzn nazywamy
te punkty i dzieli ją na odcinki o długościach odwrotnie
sumę iloczynów mas tych punktów przez odległości od tych
proporcjonalnych do ich mas.
Ruch postępowy – ruch, w którym dowolna prosta sztywno związana
płaszczyzn.
4)Środek masy układu mającego środek symetrii leży w tym środku.
z poruszającym się ciałem pozostaje stale równoległa do położenia,
I
m
m
m
xy = Σi=1 (mixiyi) ; Iyz = Σi=1 (miyizi) ; Izx = Σi=1 (mizixi) ; Ixy =
Jeżeli układ ma 2 lub więcej osi symetrii to środek leży w punkcie
jakie zajmowała w dowolnie obranej chwili czasu t, na przykład w
∫m(xy)dm ...
przecięcia się tych osi
chwili początkowej.
Twierdzenie Steinera – moment bezwładności względem dowolnej
5)Rzut środka ciężkości figury płaskiej na dowolną płaszczyznę jest
Ruch płaski – ruch, w którym wszystkie punkty ciała poruszają się w
osi jest równy momentowi osi równoległej i przechodzącej przez
środkiem ciężkości rzutu tej figury na dowolną płaszczyznę.
płaszczyznach równoległych
do
pewnej
płaszczyzny zwanej
środek masy układu powiększonemu o iloczyn masy całkowitej i
6)Moment statyczny względem osi lub płaszczyzny przechodzącej
płaszczyzną kierującą.
kwadratu odległości między tymi osiami. I = I0 + md2
przez środek ciężkości jest zawsze równy 0.
V B = V A + ω × AB ; V B = V A + V BA ; a B = a A + a BA ; a B = a A + a sBA Główne momenty bezwładności – pierwiastki równania sekularnego
7)Moment statyczny nie zmieni się jeżeli zamiast części układu
+ a nBA
I1>I2>I3 , gdzie I1 = Imax, I3 = Imin
wprowadzimy punkt materialny o masie równej masie danej części
Chwilowy środek prędkości w ruchu płaskim – jeżeli chwilowa
leżący w środku ciężkości tej części masy.
prędkość kątowa jest niezerowa to musi istnieć taki punkt, którego
1)Każda oś symetrii jest osią główną.
prędkość jest równa zero.
2)Każda prosta prostopadła do płaszczyzny symetrii jest też osią
Chwilowy środek przyśpieszeń – w ruchu płaskim jeżeli ω i ε nie są
główną.
jednocześnie równe zero istnieje punkt, którego przyśpieszenie jest
3)Każda prosta, na której leżą środki mas warstw elementarnych
równe zero.
otrzymywanych przez podział ciała płaszczyznami prostopadłymi do
Ruch unoszenia – ruch układu ruchomego względem nieruchomego
tej prostej też jest osią główną.
układu odniesienia.
4)Momenty dewiacji względem głównych osi bezwładności są równe
Ruch względny – ruch punktu względem układu ruchomego.
zero.
Ruch bezwzględny – ruch punktu względem układu nieruchomego.
5)Jeżeli główne osie bezwładności przechodzą przez środek masy
Prędkość bezwzględna – jest równa wektorowej sumie prędkości
układu to nazywamy je centralnymi.
względnej i unoszenia V b = V w + V u
Ruch i własności dynamiczne środka masy
Przyśpieszenie bezwzględne – jest wektorową sumą przyśpieszenia
6)Pęd ogólny układu punktów materialnych równa się pędowi masy
względnego, unoszenia i Coriolisa
całkowitej układu umieszczonej w środku masy.
a b = a w + a u + a c
7)Środek masy układu punktów materialnych porusza się tak jakby
gdzie a w – przyśpieszenie punktu względem ruchomego układu
była w nim skupiona całkowita masa układu poddana działaniu sumy
TARCIE KINETYCZNE
odniesienia
wszystkich sił.
a u – przyśpieszenie punktu układu ruchomego pokrywającego się z 8)Pochodna pędu głównego układu punktów materialnych równa się
danym punktem
sumie wszystkich sił działających na układ.
Q
a
Twierdzenie Kóniga – energia kinetyczna ciała sztywnego równa się
GR=µG; TMAX=µT; 0≤Q≤ QGR; 0≤T≤TGR
c = 2 ω×Vw przyśp. Coriolisa
sumie energii kinetycznej ruchu postępowego całej masy skupionej w
tgϕ
D Y N A M I K A
środku masy oraz energii kinetycznej ruchu obrotowego ciała
gr= TGR/N=µN/N=µ ; ϕgr=arctgµ ; 0≤ϕ≤ϕGR
Zasada pędu – pochodna wektora pędu względem czasu t jest równa
sztywnego dookoła osi przechodzącej przez środek masy.
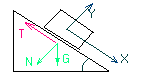
Tarcie na równi pochyłej
sile działającej na punkt materialny
E
ω2
k = mu2/2 + Ik
F = d p/dt
Reakcje dynamiczne łożysk osi obrotu
Zasada zachowania pędu – jeżeli na ciało nie działają żadne siły lub
RAz = (-ω2/l)Iyz ; RAx = (-ω2/l)Ixy ; ROx = (ω2/l)Ixy - ω2xsm ; ROz =
Suma P
działające pozostają w równowadze ( P = 0) to pęd ciała jest stały p =
(ω2/l)I
X=0 Gsinα-T=0
yz - ω2zsm
Suma P
const.
Y=0 N-Gcosα=0
Prawa dynamiki Newtona
T
Jeżeli reakcje dynamiczne są niezerowe układ jest dynamicznie nie
MAX=µT; TMAX= Gsinαmax; tgαmax=µ
α
1)Jeżeli na punkt materialny w pewnym okresie czasu nie działają
wyważony. Reakcje dynamiczne będą zerowe jeżeli oś obrotu będzie
max=arctgµ warunek samohamowalności równi
żadne siły lub siły działające wzajemnie się równoważą, to punkt
jedną z głównych centralnych osi bezwładności wirującego ciała.
pozostaje w spoczynku, lub porusza się ruchem jednostajnym po linii
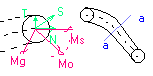
Żyroskop – ciało symetryczne obracające się dookoła materialnej osi
prostej.
symetrii, przy czym jeden z punktów osi jest nieruchomy.
2)Przyśpieszenie
punktu
materialnego
ma
wartość
wprost
Precesja – ruch, jaki powstaje jeżeli ciało wprowadzimy w obrót z
proporcjonalną do wartości działającej siły i ma jej kierunek i zwrot F
prędkością kątową wokół materialnej osi symetrii, a równocześnie osi
= m a
symetrii nadamy ruch obrotowy dookoła osi w ustalonej przestrzeni.
3)Jeżeli na punkt materialny A działa punkt materialny B to również
punkt materialny B działa na punkt materialny A siłą równą co do
TEORIA UDERZENIOWA
wartości i kierunku o zwrocie przeciwnym. Siły te leżą na prostej
Siły chwilowe – siły które działając na ciało materialne w ciągu łączącej oba te punkty.
bardzo krótkiego czasu osiągają bardzo duże wartości w porównaniu z
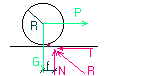
Tarcie przy toczeniu
Prawo
powszechnego
ciążenia
–
dwa
punkty
materialne
siłami np. ciężkości.
oddziaływują na siebie siłami ≈ (m1m2)/r2 ; | P| = k*(m1m2)/r2
QR=NT f- współ. tarcia przy toczeniu
Siła bezwładności. Zasada d’Alamberta: P + B = 0 Siły działające τ
Impuls - ∫ Pdt = s
0
na ciało są w równowadze z siłą bezwładności.
NfMax=MT moment tarcia przy toczeniu
Wyszukiwarka
Podobne podstrony:
Sciaga z mechany duza
Sciaga z mechany duza
Mechanika techniczna(12)
Mechanika Semest I pytania egz
MOTORYKA DUŻA i mała
wykl 8 Mechanizmy
mechanizm mycia i prania
MECHANIKA II DYN
METODY KOMPUTEROWE W MECHANICE 2
08 BIOCHEMIA mechanizmy adaptac mikroor ANG 2id 7389 ppt
Mechanizm obrzęków
Mechanizmy swoistej immunoterapii alergii 3
mechanika kwantowa
Mechanizmy nadwrażliwości
więcej podobnych podstron