ZASADY STATYKI
1. Zasada równoległoboku - dwie siły przyłożone do jednego punktu możemy zastąpić jedną siłą wypadkową, która jest przekątną równoległoboku zbudowanego na tych wektorach
2. Dwie siły przyłożone do ciała sztywnego są w równowadze gdy działają wzdłuż jednej prostej i mają te same wartości, ale przeciwne zwroty. Układ taki nazywamy zerowym.
3. Działanie układu sił nie ulegnie zmianie, gdy do układu tego dodamy układ wzajemnie równoważących się sił.
4. Zasada zesztywnienia działanie układu sił nie ulegnie zmianie przez zesztywnienie ciała na które działają te siły.
5. Każdemu działaniu towarzyszy równe co do wartości o przeciwnym zwrocie i leżące na tej samej prostej przeciwdziałanie.
6. Zasada oswobodzenia z więzów - każde ciało nieswobodne można oswobodzić z więzów zastępując je reakcjami. Wówczas można rozpatrywać takie ciało jako swobodne znajdujące się pod działaniem sił sztywnych i biernych.
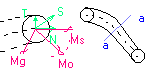
Momentem siły P względem punktu 0 nazywamy iloczyn wektorowy tej siły przez promień - wektor łączący 0 z dowolnym punktem na linii działania tej siły.
Momentem siły P względem osi l nawywamy moment rzutu siły F na płaszczyznę prostopadłą do osi z względem pkt 0 w którym os przebija plaszczyzne.
Para sił to układ sił równoległych o tych samych wartościach liczbowych lecz zwrotach przeciwnych.
Własności
-moment pary sił nie zależy od wyboru bieguna względem którego wyznaczamy i jest wartością stałą.
-każdą parę sił działającą w dowolnej płaszczyźnie możemy zastąpić inną parą sił działającą w tej samej płaszczyźnie o momencie równym momentowi pierwotnemu.
-pary sił działające w jednej płaszczyźnie możemy zastąpić jedną parą sił o momencie równym sumie momentów poszczególnych par sił
-pary sił działające w różnych płaszczyznach możemy zastąpić parą o momencie równym sumie geometrycznej momentów sił.
REDUKCJA DOWOLNEGO UKŁADU SIŁ
Mo=Σa=1nMa - moment główny układu sił
S=Σk=1nPk - wektor główny układu sił
M01=M0-r×s - wzór Bosma (moment siły S względem bieguna O gdzie r = OO1)
MO1•S= MOS=k=const Iloczyn momentu głównego względem dowolnego punktu ciała i wektora głównego układu jest równy iloczynowi mom. gł. układu względem bieguna redukcji O i jest stały = k.
S jest pierwszym niezmiennikiem układu sił.
k - parametr układu jest drugim niezmiennikiem układu sił.
Skrętnik - wynik redukcji dla którego wektor momentu głównego M.O jest wektorem równoległym do wektora głównego S
Oś centralna układu - prosta równoległa do wektora głównego S, na której leżą wszystkie bieguny redukcji, względem których układ redukuje się do skrętnika.
Równanie parametryczne osi centralnej
(Mx-(ySz-zSy))/Sx= (My-(zSx-xSz))/Sy= (Mz-(xSy-ySx))/Sz
TABLICA REDUKCJI
S |
M.O |
K |
Wynik |
S≠0 |
M.O≠0 |
K≠0 |
Skrętnik lub 2 siły równoległe |
S≠0 |
M.O≠0 |
K=0 |
Wypadkowa |
S≠0 |
M.O=0 |
K=0 |
Wypadkowa |
S=0 |
M.O≠0 |
K=0 |
Para sił |
S=0 |
M.O=0 |
K=0 |
Równowaga układu sił |
SZCZEGÓLNE UKŁADY SIŁ
Zbieżny układ sił - układ sił których linie działania przecinają się w jednym punkcie. Jeżeli wszystkie siły układu zbieżnego leżą w jednej płaszczyźnie układ taki nazywamy płaskim zbieżnym układem sił.
Każdy płaski układ sił można zredukować do wypadkowej
M0-(xΣi=1nPiy-Pix)=0 - równanie prostej działania wypadkowej
Warunki równowagi płaskiego układu sił M.O=0 , S=0
Układ sił równoległych - układ sił których linie działania są do siebie równoległe. Układ sił da się zredukować do wypadkowej k=0 lub pary sił gdy S=0. Środek sił równoległych to punkt zaczepienia ich wypadkowej
Środek sił równoległych - określa się jako współrzędne xs, ys, zs xs=(ΣxiPi)/ ΣPi; ys==(ΣyiPi)/ ΣPi; zs=(ΣziPi)/ ΣPi;
Moment statyczny punktu materialnego względem dowolnej płaszczyzny to iloczyn masy tego punktu i jego odległości od płaszczyzny.
Środek ciężkości to punkt w którym skupiona masa układu ma względem dowolnej płaszczyzny lub osi taki sam moment statyczny jak cały układ materialny
TWIERDZENIA DOTYCZĄCE ŚRODKA MASY:
1)środek masy układu płaskiego leży w płaszczyźnie tego układu
2)środek masy linii prostej leży na tej linii
3)środek masy dwóch punktów materialnych leży na prostej łączącej te punkty i dzieli ją na odcinki o długościach odwrotnie proporcjonalnych do ich mas.
4)Środek masy układu mającego środek symetrii leży w tym środku. Jeżeli układ ma 2 lub więcej osi symetrii to środek leży w punkcie przecięcia się tych osi
5)Rzut środka ciężkości figury płaskiej na dowolną płaszczyznę jest środkiem ciężkości rzutu tej figury na dowolną płaszczyznę.
6)Moment statyczny względem osi lub płaszczyzny przechodzącej przez środek ciężkości jest zawsze równy 0.
7)Moment statyczny nie zmieni się jeżeli zamiast części układu wprowadzimy punkt materialny o masie równej masie danej części leżący w środku ciężkości tej części masy.
TARCIE KINETYCZNE
QGR=μG; TMAX=μT; 0≤Q≤ QGR; 0≤T≤TGR
tgϕgr= TGR/N=μN/N=μ ; ϕgr=arctgμ ; 0≤ϕ≤ϕGR
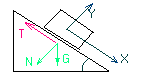
Tarcie na równi pochyłej
Suma PX=0 Gsinα-T=0
Suma PY=0 N-Gcosα=0
TMAX=μT; TMAX= Gsinαmax; tgαmax=μ
αmax=arctgμ warunek samohamowalności równi
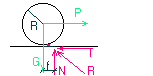
Tarcie przy toczeniu
QR=NT f- współ. tarcia przy toczeniu
NfMax=MT moment tarcia przy toczeniu
0≤ MT≤QR=Nf
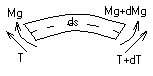
Tarcie pasów o koła
S=S1eαμ; α- kąt opasania; S,S1 - siła naciągu pasa
PRĘT
Pręt - bryła której jeden wymiar wyraźnie dominuje nad pozostałymi. Pręt powstaje w wyniku przesuwania figury płaskiej A wzdłuż krzywej k, tak że figura pozostaje zawsze prostopadła do krzywej k, a jej środek ciężkości zawsze znajduje się na krzywej k. Figurę płaską nazywamy przekrojem normalnym pręta a krzywą k - osią pręta.
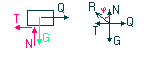
T- siła poprzeczna
N - siła normalna
Ms - moment skręcający
Mg - moment gnący
Siłą normalną w przekroju aa nazywamy sumę rzutów wszystkich sił znajdujących się po jednej stronie przekroju na kierunek normalny do przekroju (dodatnia jeżeli powoduje rozciąganie).
Siłą poprzeczną w przekroju aa nazywamy sumę wszystkich sił znajdujących się po jednej stronie przekroju (względem jego środka ciężkości) na kierunek prostopadły do osi przekroju.
Moment zginający przekroju aa nazywamy rzut wektora momentu będącego sumą momentów wszystkich sił znajdujących się po jednej stronie przekroju na kierunek styczny do przekroju (dodatni gdy powoduje wygięcie wypukłe w dół).
Tw. Schwedlera. pochodna momentu gnącego względem współrzędnej pokrywającej się z osią pręta jest równa sile poprzecznej dMg/ds.=T; d2M.g/dx2=dT/dx=-q; q - gęstość obciążenia
KRATOWNICE
Pręt prosty nieobciążony na długości i zakończony przegubami to pręt przegubowy
Kratownica to układ prętów przegubowych połączonych ze sobą przegubami. Kratownica jest płaska jeśli pręty i obciążenia leżą w jednej płaszczyźnie
Warunek konieczny na to aby kratownica była geometrycznie niezmienna - P=2W-3; P- pręty; W - węzły (przeguby)
Metody wyznaczania sił w prętach kratownicy
analogiczne
1)równoważenia węzłów - wycinamy węzły w kratownicach i piszemy warunki równowagi dla każdego z osobna
2)przecięć Rittera - piszemy 3 warunki momentów (tylko 1 niewiadoma)
wykreślne
1)Cremana
2)Cluman
KINEMATYKA
Prędkości i przyspieszenia
V=dr/dt=dr/ds. * ds./dt=ds./dt * τ
|V|=ds./dt V=V*τ
a=dV/dt=d/dt(V*τ)=dV/dt * τ + V*dτ/dt
a= d2s/dt2 * τ + V2/r * n
Stopnie swobody - liczba niezależnych parametrów potrzebnych do określenia położenia ciała sztywnego w przestrzeni.
Ciało swobodne (nie poddawane działaniu więzów posiada 6 stopni swobody) n = 6 - w . Funkcje określające położenie ciała nazywamy równaniami ruchu ciała sztywnego (ich ilość równa jest ilości stopni swobody)
Ruch kulisty - taki ruch ciała sztywnego, podczas którego jeden jego punkt pozostaje nieruchomy (środek ruchu kulistego). W ruchu kulistym torami punktu ciała są krzywe, które leżą na powierzchniach kul o promieniach równych odległościom tych punktów od punktu nieruchomego.
v = ω × r ; a = ε × r
Ruch obrotowy - ruch wokół prostej łączącej dwa nieruchome punkty ciała sztywnego. Prostą nazywamy osią obrotu.
ω = dϕ/dt ; |aτ| = ε*r = [d2ϕ/dt2]*r |an| = ω2*r ; v = ω × r
Ruch postępowy - ruch, w którym dowolna prosta sztywno związana z poruszającym się ciałem pozostaje stale równoległa do położenia, jakie zajmowała w dowolnie obranej chwili czasu t, na przykład w chwili początkowej.
Ruch płaski - ruch, w którym wszystkie punkty ciała poruszają się w płaszczyznach równoległych do pewnej płaszczyzny zwanej płaszczyzną kierującą.
VB = VA + ω × AB ; VB = VA + VBA ; aB = aA + aBA ; aB = aA + asBA + anBA
Chwilowy środek prędkości w ruchu płaskim - jeżeli chwilowa prędkość kątowa jest niezerowa to musi istnieć taki punkt, którego prędkość jest równa zero.
Chwilowy środek przyśpieszeń - w ruchu płaskim jeżeli ω i ε nie są jednocześnie równe zero istnieje punkt, którego przyśpieszenie jest równe zero.
Ruch unoszenia - ruch układu ruchomego względem nieruchomego układu odniesienia.
Ruch względny - ruch punktu względem układu ruchomego.
Ruch bezwzględny - ruch punktu względem układu nieruchomego.
Prędkość bezwzględna - jest równa wektorowej sumie prędkości względnej i unoszenia Vb = Vw + Vu
Przyśpieszenie bezwzględne - jest wektorową sumą przyśpieszenia względnego, unoszenia i Coriolisa
ab = aw + au + ac
gdzie aw - przyśpieszenie punktu względem ruchomego układu odniesienia
au - przyśpieszenie punktu układu ruchomego pokrywającego się z danym punktem
ac = 2ω×Vw przyśp. Coriolisa
Wyszukiwarka
Podobne podstrony:
Sciaga z mechany duza
dokumenty word Sciąga mechanika
Ściąga mechanika gruntów
ściąga mechanika płynów
sciaga CNC duża
ściaga mechanika
ściąga mechanika 3
ściąga mechanika płynów 2
sciaga 4 mechanika, Zaawansowane materiały i nanotechnologia UJ, Fizyka, Mechanika
Ściąga Z Mechaniki, Studia - Budownictwo, Mechanika ogólna
Sciąga mechanika gruntów
ściąga mechanika
mechanika, sciaga mechana(2), 1 zasada dynamiki-jeśli na ciało nie działa żadna siła lub siły działa
ŚCIĄGI, Sciaga 1, Mechanika płynów - część mechaniki teoretycznej, zajmuje się badaniem ruchu płynów
ŚCIĄGA Z MECHANIKI GRUNTÓW, AGH-materiały, TPEZ Technika Podziemnej Eksploatacji Złóż
ściąga mechana
ściąga mechana
ściąga mechana
OSN ściąga, Mechanika i Budowa Maszyn, sem. 6, Obrabiarki CNC, Zaliczenie
więcej podobnych podstron