1. 2
2. 1
3. 3
4. Łańcuch kinematyczny otwarty to łańcuch, w którym tylko 1 z członów zewnętrznych jest połączony ruchowo z podstawą (ostoją).
5. Łańcuch kinematyczny zamknięty to łańcuch, w którym co najmniej 2 człony zewnętrzne są połączone ruchowo z podstawą.
6. w 3 n ∑ହ୧ୀ
ସ i 3 p lub w 3 n p
2 p
୧
ସ
ହ
7. w 6 n ∑ହ୧ୀଵ i p୧
8. ruchliwość lokalna w mechanizmach – określana jest w przypadkach, kiedy mechanizm posiada człony kinematycznie zbędne (mówimy wtedy o lokalnych stopniach swobody) [str.22-23 J.Felis]
9. 3
10. ???
11. ruch płaski
12. ruch postępowy krzywoliniowy
13. promień krzywizny i prędkość liniową lub promień krzywizny i prędkość kątową
14. a୬ ୴మ lub a୬ ωଶr
୰
15. w przypadku mechanizmów jarzmowych
16. najogólniej: w mechanizmach złożonych, w których ruch unoszenia jest ruchem obrotowym a ruch względny jest ruchem postępowym; warunki jakie muszą być spełnione: ωu ≠0 i vw ≠0 oraz wektor vw nie może być równoległy do wektora ωu
17. a
2ω x v
ୡ୭୰
୳
୵
18. 1. narysować mechanizm w podziałce kl w położeniu przewidzianym do analizy kinematycznej 2. określić ruchliwość i klasę mechanizmu
3. wskazać człon lub człony napędzające
4. oznaczyć cyframi człony mechanizmu, poczynając od członu napędzającego
5. oznaczyć dużymi literami istotne punkty mechanizmu
6. określić parametry kinematyczne członu napędzającego
7. napisać równania wektorowe określające relacje pomiędzy prędkościami punktów mechanizmu 8. rozwiązać wykreślnie równania wektorowe, rysując w podziałce kv odpowiednie wieloboki wektorowe na tzw. planie prędkości, wychodząc z jednego punktu biegunowego
9. analogicznie rozwiązać zadanie dotyczące przyspieszeń korzystając z wartości wyznaczonych na podstawie planu prędkości i narysować je w postaci tzw. planu przyspieszeń w podziałce ka 19. 1. przedstawić mechanizm w postaci zamkniętego wieloboku wektorowego
2. przyjąć do obliczeń 2n-2 parametrów mechanizmu (parametry te muszą być znane i należy je przyjąć jako dane w momencie definiowania mechanizmu)
3. zrzutować wielobok na osie płaskiego układu współrzędnych (x,y) → otrzymujemy 2 równania skalarne (układ równań)
4. na podstawie ww. układu równań można wyznaczyć 2 szukane parametry geometryczne np. 2
długości, długość i kąt lub 2 kąty
5. zróżniczkować ww. równania względem czasu → otrzymujemy 2 równania (układ równań) 6. na podstawie powstałego układu równań wyznaczyć 2 szukane prędkości liniowe lub kątowe 7. zróżniczkować równania z punktu 5. względem czasu → otrzymujemy 2 równania (układ równań)
8. wyznaczyć 2 szukane przyspieszenia liniowe lub kątowe
20. przekładnia obiegowa w odróżnieniu od przekładni zwykłej cechuje się tym, że środki niektórych kół
(satelit) poruszają się po torach kołowych wokół osi geometrycznej przekładni z tym, że środki tych torów leżą w geometrycznej osi przekładni
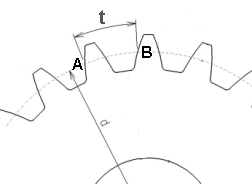
21. podziałka zazębienia jest to odległość między punktami A i B, mierzona
po łuku na średnicy podziałowej d (długość jednego cyklu).
1
22. moduł zaziębienia jest to iloraz podziałki zazębienia i liczby „π”: m ୲
23. przełożenie kierunkowe jest to iloraz prędkości kątowej członu czynnego (napędzającego) „a” i biernego
(napędzanego) „b” przy unieruchomionym członie „c” → iୡ ఠ
ୟୠ
ఠ
24. przełożenie kierunkowe jest dodatnie gdy zwroty prędkości kątowych członu napędzającego i napędzanego są zgodne (przekładnia o zazębieniu wewnętrznym)
25. ruch złożony
୨
୨
26. i
னିன i 1 ன 1 iୠ dla przekładni o 1 stopniu swobody$
ୟୠ
ன
ୟୠ
ୟ୨
ିன
ன
27. w przekładni falowej członem wyjściowym jest elastyczny pierścień zębaty natomiast w typowej przekładni obiegowej jest to satelita
28. 2
29. 1
30. mechanizm różnicowy (dyferencjał)
31. P
R B 0
୧
୧
୧
(dla ruchu postępowego)
M M M 0
୧
ୖ୧
୧
(dla ruchu obrotowego)
dla ruchu płaskiego oba równania!
32. B
m a
୧
୧ ୱ୧
33. M
J ε
୧
ୱ୧ ୱ
34. siły te różnią się „mocą” → siła czynna (napędzająca) to siła, której moc jest dodatnia (N>0) natomiast siła bierna (oporu) to siła której moc jest ujemna (N<0)
35. dwie
36. kierunek reakcji leży na prostej normalnej do obydwu krzywizn i przechodzącej przez ich środki 37. siłą bezwładności jest w tym przypadku siła odśrodkowa, a więc: kierunek siły bezwładności leży na promieniu jarzma (jest równoległy do jarzma) i zwrot ma na zewnątrz
38. siła równoważąca jest to siła, która zapewnia równowagę dynamiczną mechanizmu obciążonego układem sił zewnętrznych przy założonym prawie ruchu członu napędzającego
39. moment równoważący jest to moment, który zapewnia równowagę dynamiczną mechanizmu obciążonego układem sił zewnętrznych przy założonym prawie ruchu członu napędzającego 40. stosując metodę Culmana można wyznaczyć wykreślnie wartości trzech sił dla układu czterech sił o znanych kierunkach leżących w jednej płaszczyźnie, nie tworzących układu środkowego ani równoległego, z których tylko jedna siła jest znana co do wartości [str.153 J.Felis]
41. metody mocy chwilowych pozwala wyznaczyć uogólnioną siłę równoważącą działającą na mechanizm bez konieczności wyznaczania reakcji w parach kinematycznych
42. kąt tarcia ruchowego w odniesieniu do (kąta) tarcia spoczynkowego jest mniejszy
43. wspólna strefa tarcia (WST) jest to część wspólna przekrojów stożków tarcia, a zatem jest to obszar wyznaczony przez kierunki reakcji całkowitych, jakimi prowadnica oddziaływuje
44. najogólniej: mechanizmy zaciskowe i wyciskowe (np. ścisk stolarski, wycisk do silikonu) 45. system ABS nie dopuszcza do blokady kół czyli do wystąpienia tarcia ślizgowego kinetycznego opon o asfalt
46. samohamowność mechanizmu jest to właściwość, która uniemożliwia ruch mechanizmu obciążonego siłami (przyłożonymi w odpowiednich miejscach) mimo ruchliwości dodatniej tego mechanizmu (krótko: mechanizm nie jest zdolny do wykonania ruchu pomimo ruchliwości dodatniej)
47. zwrot siły tarcia jest zgodny z liniową prędkością względną
48. zwrot momentu od sił tarcia jest zgodny z kątową prędkością względną
2
49. moc tracona w parze kinematycznej mechanizmu to moc oporów nieużytecznych (w szczególności moc sił tarcia w parach kinematycznych)
50. η ି lub η
ା
51. sprawność mechanizmu to iloraz mocy użytecznej do mocy dostarczonej → η
52. przyczyną niewyrównoważenia jest reakcja dynamiczna spowodowana siłami bezwładności członów ruchomych mechanizmu (reakcje dynamiczne są obciążeniami okresowo zmiennymi ze względu na cykliczność ruchu maszyny)
53. skutkami niewyrównoważenia są:
- drgania elementów i naprężenia zmęczeniowe
- nadmierne zużywanie się łożysk
- drgania korpusów, fundamentów i otoczenia maszyny oraz związany z tymi zjawiskami hałas 54. Mx ∑୬
My ∑୬୧ୀଵ m y 0
୧ୀଵ m x 0,
ୗ
୧ ୧
ୗ
୧ ୧
czyli: x =0 oraz y =0
s
s
55. 1. Mx ∑୬
My ∑୬୧ୀଵ m y 0
୧ୀଵ m x 0,
ୗ
୧ ୧
ୗ
୧ ୧
czyli: x =0 oraz y =0
s
s
2. D
∑୬
D ∑୬୧ୀଵ m y z 0
୧ୀଵ m x z 0,
୶
୧ ୧ ୧
୷
୧ ୧ ୧
56. B
0 dla a 0 a 0 dla v const lub v 0
ୗ
ୗ
ୗ
ୗ
57. jedna
58. dwie
59. ruch ustalony maszyny to taki ruch, w którym: prędkość kątowa członu roboczego maszyny jest stała, praca sił zewnętrznych jest równa zero
ruch nieustalony maszyny to taki ruch, w którym: prędkość kątowa członu roboczego maszyny nie jest stała, praca sił zewnętrznych nie jest równa zero
60. ruch okresowy ustalony maszyny to taki ruch, w którym dla okresu cyklu praca sił czynnych = praca sił
biernych
61. człon redukcji to model dynamiczny mechanizmu posiadający jeden stopień swobody budowany jako zastępczy uproszczony model fizyczny tego mechanizmu dla łańcucha kinematycznego mechanizmu o ruchliwości 1 (może nim być dowolny człon mechanizmu wykonujący ruch obrotowy lub postępowy) ଶ
ଶ
62. m ∑୬୧ୀଵ /m 0୴1 2 J 0 ன 1 3
୰
୧
୴
ୱ୧
୴
୴
ன
୬
୬
63. P ∑୧ୀଵ P cosα 6 ∑୨ୀଵ M
୰
୧
୴
୧
୨
୴
ୢ୴
ୢ୫
64. P P
P
m
౨ ଵ
౨ vଶ
୰
୰ୡ
୰ୠ
୰
dla członu redukcji poruszającego się r. postępowym
ୢ୲
ଶ ୢୱ
୰
౨
ୢன
ୢ
M M
M
J
౨ ଵ ౨ ωଶ
୰
୰ୡ
୰ୠ
୰
dla członu redukcji poruszającego się r. obrotowym
ୢ୲
ଶ ୢ
୰
౨
65. M M dφ d ଵ J ωଶ
M dφ ଵ J ωଶ J ωଶ
ୡ
ୠ
lub M
ଶ ୰
ୡ
ୠ
୰୧
୧
୰୭
బ
ଶ
66. - zredukowany moment sił biernych okresowo zmienny w czasie lub w funkcji kąta obrotu
- zredukowany moment sił czynnych okresowo zmienny w czasie lub w funkcji kąta obrotu
- zredukowany moment sił bezwładności okresowo zmienny w czasie lub w funkcji kąta obrotu 67. δ னିன lub δ ୴ି୴
னś
୴ś
68. J miଶ ୋୈమ
ସ
69. dobór wstępny (dobór rodzaju silnika):
- rodzaj pracy maszyny roboczej
- zmienność obciążenia
- możliwość sterowania
dobór wielkości silnika (mocy nominalnej Nn):
- wymagana prędkość obrotowa wału ns
- wymagana wartość momentu nominalnego Mn
- wymagana wartość momentu maksymalnego Mk
- wymagana wartość momentu rozruchowego Mr
- dopuszczalny czas rozruchu tr układu napędowego
70. 1. moment rozruchowy silnika
2. moment bezwładności układu
3. moment oporów
3
Wyszukiwarka
Podobne podstrony:
Projekt TMM
Prog wyk TMM AiR 2010
Prog lab TMM 2006 2007
zaliczenie - pytania i odp2, Politechnika Lubelska Wydział Mechaniczny, Semestr II, Podstawy Elektro
tmm
Sprawozdanie TMM Przekładnie
TMM projekt, Studia Mechatronika, Semestr 4, TMM, Projekty
TMM Projekt 1 2 wariant 8
fiz odp2 1 , Fizyka 2
odp2
sciaga tmm egz
Prog wyk TMM AiR 2011
MiBM wykL,ady TMM stacjonarne20 Nieznany
więcej podobnych podstron