1. Omówić równowagę trwałą, chwiejną i obojętną dla punktu materialnego.
2. Wyprowadzić zasadę zachowania pędu dla układu punktów materialnych.
3. Zderzenia elastyczne i nieelastyczne. Przykłady.
4. Ruch ciał o zmiennej masie. Równanie Ciołkowskiego.
5. Definicja wektora położenia środka masy, wektora prędkości, przyśpieszenia i pędu środka masy.
6. Pokazać, że w inercjalnym układzie odniesienia całkowita zmiana pędu układu cząstek jest proporcjonalna do wypadkowej sił zewnętrznych działających na ten układ.
7. Pokazać, że w inercjalnym układzie odniesienia pęd układu cząstek jest równy pędowi środka masy.
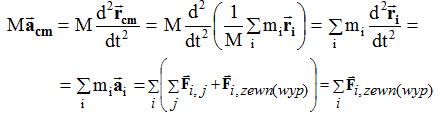
8. Pokazać, że w inercjalnym układzie odniesienia przyspieszenie środka masy układu cząstek jest proporcjonalne do wypadkowej sił zewnętrznych.
9. Definicja momentu siły i momentu pędu dla punktu materialnego.
10. Wyprowadzić II zasadę dynamiki dla ruchu obrotowego punktu materialnego r
(τ = r
Iα )
1. Jeżeli środek ciężkości znajduje się na linii pionowej przechodzącej przez punkt zawieszenia i środek ciężkości znajduje się w najniższym możliwym położeniu to ciała jest w równowadze trwałej.
Jeżeli w najbliższym otoczeniu środek ciężkości przy odchodzeniu od położenia równowagi nie zmienia się to mamy równowagę obojętną.
Jeżeli maleje – równowaga chwiejna.
2. Zasada zachowania pędu:
Jeśli układ cząstek jest izolowany, to całkowity pęd układu nie zmienia się.
p (t) = const.
Wyprowadzenie:
Sposób 1:
F12 = - F21
F12 = dp1 / dt F21 = dp2 / dt
dp1 / dt = - dp2 / dt dp1 / dt + dp2 / dt = 0 d/dt(p1 + p2) = dpc / dt = 0
pc = const.
Sposób 2 :
dp / dt = d/dt ∑
∑
i pi = ∑i dpi / dt = ∑i Fwyp, i = ∑i
i≠j Fij = 0
3. Zderzenia:
Vi – prędkość początkowa pi – pęd początkowy
Vf – prędkość końcowa pf – pęd końcowy
a) Jeśli cząstki przed lub po zderzeniu mają te same prędkości to zderzenie jest nieelastyczne:
m1V1i + m2V2i = (m1 + m2)Vf ,dla wektorów V
m1V1i + m2V2i = (m1 + m2)Vf ,skalarnie
pi = pf
b) Jeśli całkowita energia nie zmienia się to zderzenie jest elastyczne: m1V1i + m2V2i = m1V1f + m2V2f ,dla wektorów V
m
2
2
2
2
1V1i / 2 + m2V2i / 2= m1V1f / 2 + m2V2f / 2
m1V1i - m2V2i = m1V1f + m2V2f ,skalarnie
4.
V + dV
V
m
m-dmx
u V - u
V – prędkość rakiety w pewnym inercjalnym układzie odniesienia w chwili t u – prędkość gazów względem rakiety
(V – u) – prędkość gazów w inercjalnym układzie odniesienia
V + Dv – prędkość rakiety w chwili (t + dt)
m – dms – dms elementarna masa porcji wyrzucanych gazów
p1 = p2
mV = (m - dms)(V + dV) + dms(V – u)
mV = mV - dmsV + mdv - dmsdV + dmsV - dmsu ,dmsdV → 0
mdV = dmsu | :dt
mdV / dt = udms / dt
ma = udms / dt
Fciągu = u * dms/dt
Równanie Ciołkowsksiego (wyprowadzenie) :
mdV = dmsu
mdv = -dmu | * 1/mu
dV/u = -dm/m | ∫
V/u + c1 = -ln m + c2 ,c = c1 + c2
* V/u = -ln m + c
Niech dla t=0 v=v0 m=m0
1/u*V0 = -ln m0 + c
c = V0/u + ln m0 → *
u/V = -ln m + ln m0 + V0/u
V = V0 + u*ln m0/m
5.
a) Wektor położenia środka masy:
r
1
r
m r
cm =
∑
i i
M
i
b) Wektor prędkości środka masy:
1
V
m V
cm =
∑
i
i
M
i
c) Wektor przyspieszenia środka masy:
1
a
m a
cm =
∑
i
i
M i
d) Wektor pędu środka masy:
1
p
m p
cm =
∑ i i
M i
6. Wyprowadzenie:
݀
݉௨ݎŚெ = ݉ଵݎଵ + ݉ଶݎଶ + ⋯ + ݉ݎ | ݀ݐ
݀
݉௨ݒŚெ = ݉ଵݒଵ + ݉ଶݒଶ + ⋯ + ݉ݒ |݀ݐ
݀௨
݀ݐ = ݉ଵܽଵ + ݉ଶܽଶ + ⋯ + ݉ܽ
݀௨
݀ݐ = ܨ,௭௪ę௧௭.௪௬.
7. Wyprowadzenie:
݀ݎ
݀ 1
1
݀ݎ
1
1
1
ܸ
Śெ݉
Śெ =
݀ݐ = ݀ݐ ൭ܯ ݉ݎ൱ = ܯ ݉ ݀ݐ = ܯ ݉ݒ = ܯ = ܯ
ୀଵ
ୀଵ
ୀଵ
ୀଵ
Śெ = ܯܸŚெ
8. Wyprowadzenie:
r
r
Macm = ∑ F i, zewn( wyp) i
9. Moment siły dla punktu materialnego określamy wzorem:
r
r
r
τ ≡ r ×F
i definiujemy jako jako iloczyn wektorowy pomiędzy wektorami położenia i siły.
Kierunek momentu siły określami zgodnie z regułą śruby prawoskrętnej, a wartość momentu siły obliczamy ze wzoru M=rFsinα.
Moment pędu dla punktu materialnego określamy wzorem:
L ≡ r × p
I definiujemy jako iloczyn wektorowy pomiędzy wektorami położenia i pędu. Wektor L i jego wartość zależy od położenia punktu.
݀ܮ ݀(ܫϣ)
݀ϣ
߬ = ݀ݐ = ݀ݔ = ܫ ݀ݐ = ܫߙ
Wyszukiwarka
Podobne podstrony:
12., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
10., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
18., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
11., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
5., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
dr Żywczok - Zagadnienia 20-25, Semestr II, Teoria wychowania
Marketing polityczny - opracowane zagadnienia 20-38, Politologia - pliki, Marketing polityczny
15., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
22., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
zagadnienie-20, Pedagogika
4., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
28., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
7., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
Gr 2, testowe opracowania zagadnineń 20 29
9., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
20., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
21., LEKTURY, ZAGADNIENIA 20 - lecie międzywojenne
więcej podobnych podstron