Zaznacz typowe zastosowania robotów humanoidalnych
rozrywka
praca w recepcji, obsługa gości
praca w środowisku niebezpiecznym (np. zagrożonym wybuchem)
praca w przemyśle (np. przy montażu)
autonomiczny pilot/kierowca statków i pojazdów
prace domowe (sprzątanie, zmywanie naczyń, gotowanie, itp.)
badania mechaniki kończyn, badania z dziedziny interakcji ludzi z maszynami
Słowo "robot" zostało po raz pierwszy użyte:
w sztuce "Rossum's Universal Robots"
w powieści "Frankenstein"
w zbiorze opowiadań "I, Robot"
w powieści "Gwiezdne wojny"
Jaka jest minimalna liczba współrzędnych potrzebna do opisania położenia ciała sztywnego w przestrzeni trójwymiarowej?
1
2
3
4
5
6
9
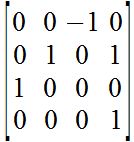
Która z podanych niżej macierzy DH opisuje operację polegającą na obrocie o 90o w lewo wokół osi Y (patrząc z dodatniej strony osi) z równoczesnym przesunięciem o 1 wzdłuż tej osi?
W systemie "North Star" stosowanym do pozycjonowania robotów MINT pozycję robota określa się na podstawie:
pomiaru kąta pomiędzy namiarami na dwa punkty na suficie
pomiaru kąta odchylenia w płaszczyźnie pionowej na punkt na suficie
pomiaru odległości do dwóch punktów na suficie
pomiaru prędkości kątowej ruchu dwóch punktów na suficie
pomiaru drogi z systemu akcelerometrów i żyroskopu optycznego zamontowanych w robocie
Każdego robota mobilnego, poruszającego się na kołach, można zaliczyć do jednej z pięciu klas oznaczanych dwoma liczbami (∂m, ∂s).
Do jakiej klasy należy robot przedstawiony na zdjęciu?
(1,1)
(1,2)
(2,1)
(2,0)
(3,0)
Wyszukiwarka
Podobne podstrony:
Co potrafią roboty test
robotyka test, Elektronika i Telekomunikacja, EiT pwr, Semestr 3, Podstawy automatyki i robotyki
51, Budowlanka, roboty remontowe test pytania odpowiedzi
msi ściąga test, Automatyka i Robotyka, Semestr 4, Metody sztucznej inteligencji
test 2 sciaga wersja deluxe, Automatyka i Robotyka, Semestr 3, Wytrzymałość materiałów, Ściągi
test 2 sciaga wersja mini, Automatyka i Robotyka, Semestr 3, Wytrzymałość materiałów, Ściągi
test robotyka wersja skrócona
TEST Z PAR, Mechatronika WAT, Semest III, Podstawy Robotyki
1-10, Budowlanka, roboty remontowe test pytania odpowiedzi
chemia sciaga test stara, Materiały AGH WIMIR, AGH WIMIR Autamatyka i Robotyka
TEST ROBOTY, Politechnika Poznańska, Studia- materiały, Semestr 5, CiEP, egzamin, test robotyka, Rob
TEST ROZWIAZANY 2011, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO, teori
31-40 do wysy, Budowlanka, roboty remontowe test pytania odpowiedzi
Przyklad Test, PWR, Automatyka i Robotyka (AIR), Semestr II, Fizyka 3.3, Wykład
test robotyka
TEST NR 5
test dobry
więcej podobnych podstron