Uniwersytet Szczeciński |
||||||
Zakład Podstaw Techniki |
Laboratorium Maszynoznawstwa |
|||||
Temat: WYWAŻANIE DYNAMICZNE |
Nr ćwiczenia: |
|||||
Nazwisko i imię |
Semestr V Grupa V |
Sprawdzający: |
Data: |
Ocena: |
||
Kuciński Patryk |
|
dr T. Brodziński |
|
|
||
Wyważarka dynamiczna WD-3 składa się z trzech zasadniczych zespołów:
zespół napędowy, który stanowi silnik indukcyjny na którego prawym czopie osadzona jest tarcza z podziałką kątową do określenia miejsca niewyważenia
podpory sprężyste, z którymi połączone są ruchome cewki czujników elektrodynamicznych, zamieniających wymuszone przez obracający się niewyważony przedmiot drgania na impulsy elektryczne
wektoromierz elektrodynamiczny służący do określenia wielkości i miejsca położenia kątowego dodatkowych mas, które należy dodać lub odjąć w celu wyważenia przedmiotu
Rys. nr1. Schemat ideowy wyważarki WD-3
W wyważarce WD-3 do określenia płaszczyzn i wielkości niewyważenia zastosowano wektoromierz elektrodynamiczny. Wektoromierz składa się z dwóch mierników elektrodynamicznych, których odpowiednio ukształtowane wskazówki rzucają cień na ekran z naniesioną podziałką w układzie biegunowym. Cienie wskazówek mierników rzucane na ekran przecinają się w punkcie M (Rys. nr2). Odległość punktu M od środka układu biegunowego jest miarą wielkości niewyważenia ε, zaś jego położenie kątowe φ określa położenie płaszczyzny niewyważenia względem przyjętego układu odniesienia. Z tym układem odniesienia związane jest położenie tarczy podziałowej P (Rys. nr1) z naniesioną podziałką kątową analogicznie jak na ekranie wektoromierza (Rys. nr2).
Rys. nr2. Ekran wektoromierza
Niewyważenie dynamiczne jest najogólniejszym stanem niewyważenia wirnika, w którym oś wirnika i jego centralna główna oś bezwładności są skośne.
Rys. nr3. Niewyważenie dynamiczne
Ten rodzaj niewyważenia jest jednoznacznie określony wektorem niewyważenia i momentem głównym niewyważenia lub dwoma wektorami niewyważenia leżącymi w dwóch dowolnych płaszczyznach poprzecznych.
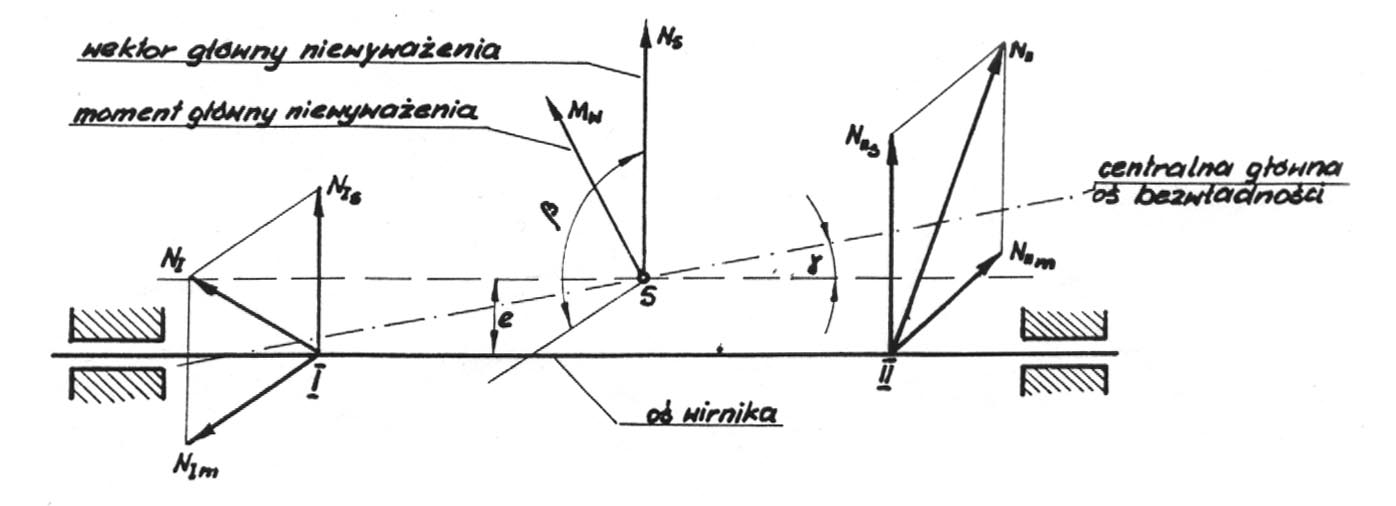
Rys. nr4. Wektor główny niewyważenia i moment główny niewyważenia
Opis wyważania dynamicznego
Po umieszczeniu przedmiotu w podporach sprawdzić wypoziomowanie przedmiotu. Następnie należy uruchomić silnik, po uruchomieniu wyważarki przestawić przełącznik 8 z położenia 0 w lewą lub prawą stronę w zależności od tego, który czynnik włączamy w obwód układu pomiarowego.
Współrzędne biegunowe ε i φ punktu przecięcia się cieni wskazówek wektoromierza określają wielkość i położenie niewyważenia dla lewej lub prawej strony przedmiotu. Wielkość ε określa przesunięcie centralnej głównej osi bezwładności przedmiotu względem osi obrotu powstałe wskutek nierównomiernego rozłożenia masy przedmiotu względem osi obrotu. Po odczytaniu wartości ε i φ dla lewej podpory należy wyważarkę wyłączyć, zahamować silnik i po ustawieniu wartości odczytanego kąta na tarczy podziałowej pod wskaźnikiem S (Rys. nr1) zaznaczyć na wyważanym przedmiocie miejsce, w którym należy dołożyć lub ująć określoną masę w zależności czy wyważarka jest przełączona na nadmiar lub niedomiar masy.
Dane charakterystyczne:
średnica czopów: 4 ÷ 26 mm
maksymalna średnica przedmiotu: 200 mm
napięcie zasilania: 220 V / 380 V
moc silnika: 110 W
prędkość obrotowa: 2900 obr×min-1
Obliczenia
Nazwa przedmiotu |
położenie kątowe |
przesunięcie osi |
masa wyważająca |
|||
|
φl |
φp |
εl |
εp |
mkl |
mkp |
kulka plastelinowa |
215° |
70° |
6 |
4,5 |
0,026 kG |
0,198 kG |
1
5
qk - masa niewyważenia
G - masa elementu wyważanego
(G = 2,27kG)
- przesunięcie osi
rk - odległość od osi obrotu do środka danej masy
Wyszukiwarka
Podobne podstrony:
Sprawozdanie z wyważania dynamicznego w dwóch płaszczyznach
Ćw1 Wyważanie dynamiczne
Dynamika1
Techniki wywierania wplywu oparte na dynamice interakcji
Analiza dynamiczna chodu w fazie podporu
wd topinambur
dynamika bryly sztywnej(1)
Kurs 03 Dynamika
Parzuchowski, Purek ON THE DYNAMIC
WYRÓWNOWAZANIE WAŁÓW (WYWAŻANIE WAŁÓW )
Automatyka dynamiakPAOo 2
czlony dynamiczne id 128806 Nieznany
zestaw 5 dynamika punktu materi Nieznany
Metody układania algorytmów rekurencja, metoda dziel i zwyciężaj, programowanie dynamiczne, metoda
Dynamika ugięcie klasyczne projekt45
więcej podobnych podstron