
Politechnika Śląska w Gliwicach
Wydział Elektryczny
Kierunek : elektrotechnika.
Rok akademicki 1999/2000.
Semestr 4.
Sprawozdanie
ćwiczenie laboratoryjne z elektroniki:
Układy impulsowe
Grupa 2 sekcja 2
Glos Piotr
Kwaczała Marcin
Mikołajczyk Rafał
Zorychta Szymon
Gliwice 28.04.2000
Wstęp.
Celem ćwiczenia jest zapoznanie się z trzema najpopularniejszymi układami impulsowymi:
- układem astabilnym (multiwibratorem),
układem monostabilnym (uniwibratorem),
przerzutnikiem Schmita.
Multiwibrator ma za zdanie wygenerować napięcie prostokątne o zadanej częstotliwości, która zależy od wartości elementów R, C (na schemacie jako R1, R2, C1, C2).
Uniwibrator jest oparty na bazie multiwibratora, lecz w swej strukturze nie posiada jednego rezystora i jeden z kondensatorów jest zastąpiony rezystancja. Jego zadaniem jest wygenerowanie pojedynczego impulsu prostokątnego przy podaniu jednego impulsu wejściowego np. szpilki. Czas trwania sygnału wyjściowego jest uzależniony od elementów R,C (R1,C1 na schemacie). Aby układ pracował poprawnie to impuls wejściowy musi być krótszy od impulsu wyjściowego.
Przerzutnik Schmita ma za zadanie przekształcić przebieg wejściowy na falę prostokątną i wyeliminować zakłócenia panujące na przebiegu wejściowym.
Pomiary i obliczenia.
1.Multiwibrator
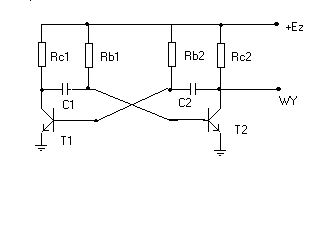
Porównujemy stałe czasowe otrzymane z pomiarów z obliczonymi na podstawie wzorów:
τ1=R2C2ln2, τ2=R1C1ln2, dla różnych przypadków.
a) Dla R1=R2=330kΩ, C1=C2=4,4nF,
τ1=0,76ms,
τ2=0,8ms,
z obliczeń: τ1=1ms,
τ2=1ms.
b) Dla R1=R2=330kΩ, C1=C2=2,7nF,
τ1=0,42ms,
τ2=0,4ms,
z obliczeń: τ1=0,62ms,
τ2=0,62ms.
c) Dla R1=R2=68kΩ, C1=C2=2,7nF,
τ1=0,085ms,
τ2=0,08ms,
z obliczeń: τ1=0,12ms,
τ2=0,12ms.
d) Dla R1=R2=68kΩ, C1=4,4nF, C2=2,7nF,
τ1=0,09ms,
τ2=0,17ms,
z obliczeń: τ1=0,12ms,
τ2=0,2ms.
e) Dla R1=R2=68kΩ, C1=2,7nF, C2=4,4nF,
τ1=0,15ms,
τ2=0,08ms,
z obliczeń: τ1=0,2ms,
τ2=0,12ms.
f) Dla R1=R2=330kΩ, C1=2,7nF, C2=4,4nF,
τ1=0,71ms,
τ2=0,4ms,
z obliczeń: τ1=1ms,
τ2=0,62ms.
g) Dla R1=R2=330kΩ, C1=4,4nF, C2=2,7nF,
τ1=0,4ms,
τ2=0,8ms,
z obliczeń: τ1=0,62ms,
τ2=1ms.
h) Dla R1=68kΩ, R2=330kΩ, C1=C2=4,4nF,
τ1=0,7ms,
τ2=0,17ms,
z obliczeń: τ1=1ms,
τ2=0,2ms.
i) Dla R1=330kΩ, R2=68kΩ, C1=C2=4,4nF,
τ1=0,18ms,
τ2=0,81ms,
z obliczeń: τ1=0,2ms,
τ2=1ms.
j) Dla R1=68kΩ, R2=330kΩ, C1=C2=2,7nF,
τ1=0,41ms,
τ2=0,08ms,
z obliczeń: τ1=0,62ms,
τ2=0,12ms.
k) Dla R1=330kΩ, R2=68kΩ, C1=C2=2,7nF,
τ1=0,08ms,
τ2=0,42ms,
z obliczeń: τ1=0,12ms,
τ2=0,62ms.
2.Uniwibrator.
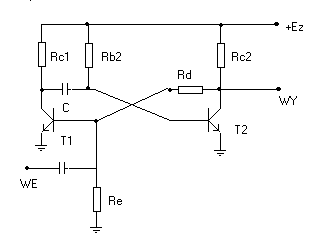
Badając uniwibrator określamy czas trwania jego impulsu T zmieniając elementy: RE, C1, R1 i porównujemy go z obliczeniami.
Wartości elementów użytych w uniwibratorze : RC1,RC2 = 3kΩ, Rd = 22kΩ,
C2 = 5,4nF T1,T2 BC 107
Czas trwania impulsu obliczamy teoretycznie: T=τ2= R1C1ln2
Dla RE=1kΩ, R1=330kΩ, C1=2,7nF, τ1=0,09ms, τ2=0,58ms,
Z obliczeń: T=τ2=0,62ms.
Dla RE=1kΩ, R1=330kΩ, C1=4,4nF, τ1=0,2ms, τ2=1ms,
Z obliczeń: T=τ2=1ms.
Dla RE=1kΩ, R1=68kΩ, C1=2,7nF, τ1=0,51ms, τ2=0,11ms,
Z obliczeń: T=τ2=0,12ms.
Dla RE=1kΩ, R1=68kΩ, C1=4,4nF, τ1=0,4ms, τ2=0,22ms,
Z obliczeń: T=τ2=0,21ms.
Dla RE=0,3kΩ, R1=68kΩ, C1=2,7nF, τ1=0,54ms, τ2=0,1ms,
Z obliczeń: T=τ2=0,12ms.
Dla RE=0,3kΩ, R1=68kΩ, C1=4,4nF, τ1=0,42ms, τ2=0,2ms,
Z obliczeń: T=τ2=0,21ms.
Dla RE=0,3kΩ, R1=330kΩ, C1=2,7nF, τ1=0,16ms, τ2=0,4ms,
Z obliczeń: T=τ2=0,62ms.
Dla RE=0,3kΩ, R1=330kΩ, C1=4,4nF, τ1=0,38ms, τ2=0,9ms,
Z obliczeń: T=τ2=1ms.
Dla RE=0,1kΩ, R1=68kΩ, C1=2,7nF, τ1=0,52ms, τ2=0,08ms,
Z obliczeń: T=τ2=0,12ms.
Dla RE=0,1kΩ, R1=68kΩ, C1=4,4nF, τ1=0,44ms, τ2=0,18ms,
Z obliczeń: T=τ2=0,21ms.
Dla RE=0,1kΩ, R1=330kΩ, C1=2,7nF, τ1=0,2ms, τ2=0,45ms,
Z obliczeń: T=τ2=0,62ms.
Dla RE=0,1kΩ, R1=330kΩ, C1=4,4nF, τ1=0,4ms, τ2=0,82ms,
Z obliczeń: T=τ2=1ms.
3.Przerzutnik Schmitta.
Dla U+ = U- na wykresie zależności UWY = f ( UWE ) nie występuje pętla jak na rysunku poniżej.
Dla U+ ≠ U-.
Dla RE=1kΩ, RC2=1,5kΩ, U+=4,4V, U-=3,2V, U0=7V.
Dla RE=1kΩ, RC2=3kΩ, U+=4,8V, U-=3,2V, U0=11,2V.
Dla RE=0,3kΩ, RC2=3kΩ, U+=3V, U-=2V, U0=13V.
Dla RE=0kΩ, RC2=3kΩ, U+=10mV, U-=0,7V, U0=14,8V.
Wnioski.
Badając multiwibrator stwierdziliśmy, że w odróżnieniu od uniwibratora jest układem, który samodzielnie generuje fale prostokątną. Jej częstotliwość jest regulowana za pomocą pary RC, wyznaczyć ją można z zależności f=1/(R1C1ln2 +R2C2ln2). Przy jednakowych wartościach rezystorów i kondensatorów stwierdziliśmy, że współczynnik wypełnienia przebiegu jest równy 50% . Układ może być wykorzystany jako generator taktujący układy cyfrowe, jako generator akustyczny i wiele innych zastosowań w urządzeniach gdzie jest potrzebny sygnał o zmiennej częstotliwości lub o jednym zakresie.
Badając uniwibrator zauważyliśmy, że podając na wejście falę prostokątną na wyjściu otrzymujemy impulsy prostokątne o określonym czasie trwania z tym tylko, że powtarzają z częstotliwością przebiegu wejściowego. Czas impulsu wyjściowego regulowany jest za pomocą dwóch elementów rezystora R1,2 i kondensatora C według oznaczeń na schemacie i określony jest zależnością τWY=RCln2, czas ten nie zależy od amplitudy sygnału wejściowego. Układ monostabilny normalnie pozostaje w jednym z dwóch stanów. Przejście do przeciwnego wymaga każdorazowo doprowadzenia impulsu wyzwalającego.
Układ taki można wykorzystać jako układ wydłużający lub skracający impulsy wejściowe. Może wiec działać jako układ opóźniający lub przyspieszający zbocze opadające, ale częstotliwość przebiegu wyjściowego będzie równa częstotliwości przebiegu wejściowego. Jest to słuszne dla czasu trwania impulsu wyjściowego nie przekraczającego okresu przebiegu wejściowego, ponieważ jeśli te czasy się pokryją lub τWY>TWE to na wyjściu otrzymamy stały poziom wysoki.
Badając układ Schmitta zauważyliśmy, że podając na wejście układu sygnał sinusoidalny, na wyjściu otrzymaliśmy falę prostokątną. Przy pętli zerowej czas trwania impulsu wyjściowego jest uzależniony od amplitudy sygnału wejściowego i od zakłóceń nakładających się na ten przebieg. Jeżeli mamy określoną wartość napięcia progowego, od którego na wyjściu układu pojawia się impuls i sygnał wejściowy jest zakłócony to w pobliżu tego poziomu następuje niepożądane wielokrotne zadziałania tego przerzutnika w efekcie otrzymujemy bardzo wiele impulsów wyjściowych, dopiero po znacznym przekroczeniu wartości chwilowej napięcia sygnału wejściowego następuje pożądany impuls wyjściowy. Przy zmniejszaniu się z powrotem tej wartości chwilowej układ zachowuje się podobnie jak opisano wcześniej. Dopiero wprowadzenie pętli histerezy stabilizuje prace układu . Pojawienie się pętli histerezy powoduje, że zniekształcenia na sygnale wejściowym nie odgrywają żadnego znaczenia. Układ bistabilny ma dwa stany stabilne a każdorazowa zmiana stanu następuje pod wpływem zewnętrznego pobudzenia.
Można też zauważyć, że wyniki przeprowadzonych pomiarów pokrywają się z obliczonymi teoretycznie a występujące błędy są niewielkie i mogą wynikać z niedokładnego odczytu z oscyloskopu.
Wyszukiwarka
Podobne podstrony:
choroby wirus i bakter ukł odd Bo
APD 9 ukł synchroniczne
zasilacze impulsowe 2
PA2 4 podstawy ukł sekw
Zaburzenia ukł pozapiramidowego (1)
ukł kostny KD
Stres a ukł krąż Sałabun Sękowska
Obw ukł nerw
PIELĘGNOWANIE CHORYCH w schorz ukł moczowego
ukl wspolczulny zapis 2003
Biofizyka komórki II Propagacja impulsu
Rozwoj ukl‚adu pokarmowego
Wyklad V Ukl moczowy
BF ukł nerw
Dgn Ukł Krąż
ukł sercowo naczyniowy
Marketing Impulsowy darmowy
więcej podobnych podstron