[36] Interpretacja geometryczna prędkości i przyśpieszenia punktu ciała sztywnego w ruchu dowolnym
W celu wyznaczenia prędkości i przyśpieszenia dowolnego punktu ciała przy użyciu rachunku wektorowego będziemy postępować w sposób analogiczny do opisanego wcześniej podczas analizy ruchu płaskiego ciała sztywnego.
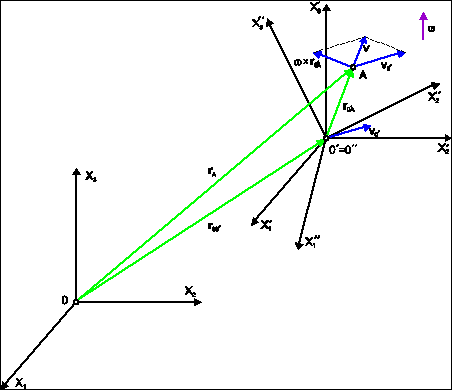
Rys. 6.18. Położenie punktu A w układzie współrzędnych ruchomym i nieruchomym oraz jego prędkość vA≡v
Prędkość punktu A (rys. 6.18) wynosi
![]()
(6.139)
Twierdzenie
Istnieje jeden i tylko jeden wektor ω zwany predkością kątową ciała sztywnego, przy pomocy którego można określić prędkość v dowolnego punktu A ciała sztywnego poprzez równość
![]()
Wyszukiwarka
Podobne podstrony:
Kinematyka mechanika mechatronika, Politechnika, Mechanika
Kinematyka mechanika mechatronika, Politechnika, Mechanika
Kinematyka mechanika mechatronika, Politechnika, Mechanika
MECHAN~7, studia mechatronika politechnika lubelska, fizyka, Fizyka - Sprawozdania poukładane, Fizyk
05 Analiza kinematyczna mechanizmów wyznaczanie prędkości i przyśpieszeń
ANALIZA KINEMATYCZNA MECHANIZMOW KRZYWKOWYCH v2011
Analiza kinematyczna mechanizmu różnicowego
Analiza kinematyczna mechanizmo prezentacja id 60692
Pytania z kinematyki, Mechanika techniczna
Kinematyka, Mechanika
04 Analiza kinematyczna mechanizmów wyznaczanie środków obrotów
więcej podobnych podstron