[18] Ciało sztywne w przestrzeni i stopnie swobody
Pokażemy, że dla określenia położenia ciała sztywnego w przestrzeni wystarczy znać położenie jego trzech dowolnych punktów, ale nie leżących jednocześnie na jednej prostej.
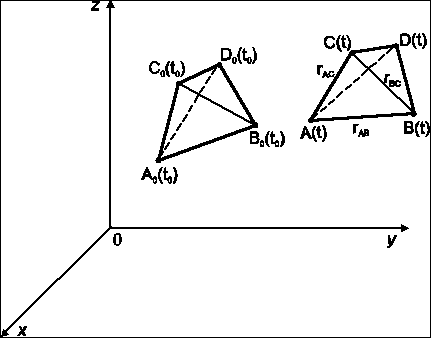
Rys. 1. Położenie punktów ciała sztywnego w chwili ![]()
i ![]()
Na rys. 1 przedstawiono nieruchomy układ współrzędnych prostokątnych 0xyz i dwa położenia ciała sztywnego w dwóch różnych chwilach czasowych jego ruchu. Zakładamy, że położenia punktów A, B i C są znane i pokażemy, że w oparciu o tę wiedzę, można wyznaczyć położenie innego dowolnie wybranego punktu ciała sztywnego (w tym przypadku punktu D). W tym celu należy zbudować czworościan ABCD, a następnie znając krawędzie CD, AD i BD należy skonstruować powierzchnię kul o promieniach równych tym krawędziom. Częścią wspólną tych trzech powierzchni kulistych będą dwa symetrycznie położone punkty względem płaszczyzny trójkąta ABC. „Cofając” się w czasie do położenia początkowego ![]()
można trafnie dokonać właściwego wyboru punktu D. Znajomość położenia punktów A, B, C oznacza znajomość ich współrzędnych ![]()
, ![]()
i ![]()
. Wzajemne odległości punktów A, B i C nie zmieniają się w czasie, wobec tego
![]()
,
![]()
,
![]()
,
gdzie: ![]()
, ![]()
, ![]()
.
Zauważmy, że wśród dziewięciu współrzędnych określających położenie punktów A, B i C trzy mogą być wyznaczone z równań (1), wobec tego tylko sześć można wybrać dowolnie.
Wynika z tego wniosek, że aby jednoznacznie określić położenie ciała sztywnego poruszającego się swobodnie (bez więzów) w przestrzeni należy znać sześć niezależnych parametrów. Określają one jednoznacznie chwilowe położenie ciała sztywnego i nazywane są jego stopniami swobody.
Jak się okaże później, wybór parametrów określających liczbę stopni swobody niekoniecznie musi być związany z wyborem trzech niewspółliniowych punktów ciała sztywnego.
Wyszukiwarka
Podobne podstrony:
Kinematyka mechanika mechatronika, Politechnika, Mechanika
Kinematyka mechanika mechatronika, Politechnika, Mechanika
Kinematyka mechanika mechatronika, Politechnika, Mechanika
MECHAN~7, studia mechatronika politechnika lubelska, fizyka, Fizyka - Sprawozdania poukładane, Fizyk
05 Analiza kinematyczna mechanizmów wyznaczanie prędkości i przyśpieszeń
ANALIZA KINEMATYCZNA MECHANIZMOW KRZYWKOWYCH v2011
Analiza kinematyczna mechanizmu różnicowego
Analiza kinematyczna mechanizmo prezentacja id 60692
Pytania z kinematyki, Mechanika techniczna
Kinematyka, Mechanika
04 Analiza kinematyczna mechanizmów wyznaczanie środków obrotów
więcej podobnych podstron