[27] Kinematyczne równania Eulera
Niech zadane będą wektory prędkości obrotowej ciała wzdłuż osi ![]()
(patrz rys. 6.7).
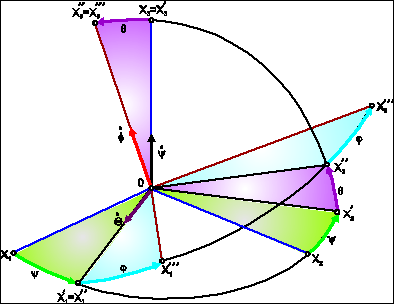
Rys. 6.7. Kąty Eulera wektory prędkości kątowych ![]()
Z rys. 6.7 wynika, że
![]()
(6.62)
![]()
(6.63)
![]()
(6.64)
Naszym celem jest wyznaczenie prędkości kątowej ω ciała w układzie współrzędnych
![]()
wobec tego wektory (6.62) - (6.64) powinny być zrzutowane na te osie. Przyjmując
![]()
(6.65)
otrzymujemy
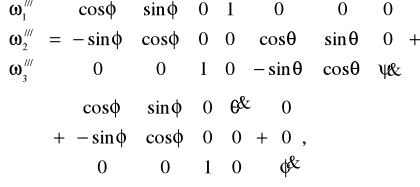
(6.66)
a w postaci „rozwiniętej” mamy
(6.67)
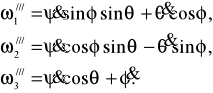
Z równania (6.67) otrzymujemy wartość prędkości kątowej:
![]()
(6.68)
Wyszukiwarka
Podobne podstrony:
Kinematyka mechanika mechatronika, Politechnika, Mechanika
Kinematyka mechanika mechatronika, Politechnika, Mechanika
Kinematyka mechanika mechatronika, Politechnika, Mechanika
MECHAN~7, studia mechatronika politechnika lubelska, fizyka, Fizyka - Sprawozdania poukładane, Fizyk
05 Analiza kinematyczna mechanizmów wyznaczanie prędkości i przyśpieszeń
ANALIZA KINEMATYCZNA MECHANIZMOW KRZYWKOWYCH v2011
Analiza kinematyczna mechanizmu różnicowego
Analiza kinematyczna mechanizmo prezentacja id 60692
Pytania z kinematyki, Mechanika techniczna
Kinematyka, Mechanika
04 Analiza kinematyczna mechanizmów wyznaczanie środków obrotów
więcej podobnych podstron