PODSTAWY AUTOMATYKI 1 - GRUPA WIESŁAW1
1. Wyjaśnij pojęcie liniowego i ciągłego układu dynamicznego o stałych skupionych.
Układ dynamiczny to układ opisany przez trójkę: s := {T, W, B}, gdzie: T - zbiór chwil czasowych, W - zbiór wartości sygnałów, B - zbiór trajektorii.
Układ dynamiczny nazywamy:
- ciągłym - jeśli T = R, gdzie R - zbiór liczb rzeczywistych, czyli czas jest zmienną ciągłą,
- dyskretnym - jeśli T = C, gdzie C - zbiór liczb całkowitych, czyli czas jest zmienną dyskretną.
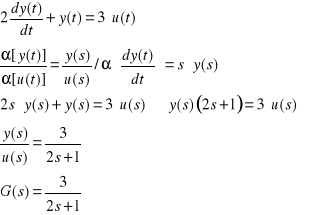
2. Dla układu sterowania o transmitancji ![]()
podać równanie różniczkowe i określić odpowiedź na skok jednostkowy.
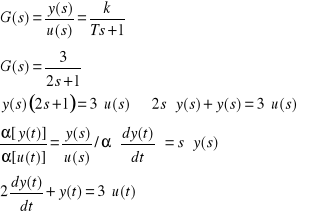
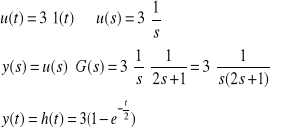
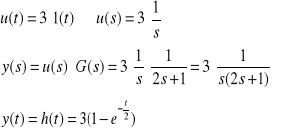
Odpowiedź na skok jednostkowy:
3. Co można powiedzieć o własnościach układu dynamicznego, gdy transmitancja układu G(s) = k, gdzie k jest liczbą rzeczywistą.
Możemy zastosować taki układ, gdyż jest do przewidzenia jego działanie i dzięki temu wiemy co się stanie. Obiekt jest w stanie ustalonym.
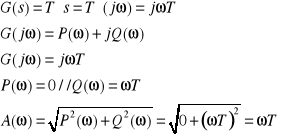
4. Naszkicuj charakterystykę amplitudową układu o transmitancji ![]()
uwzględniając przykładowe wartości ω = 0, 1, 2 i ∞ oraz T = 1.
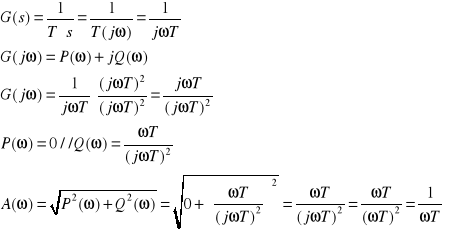
I dalej trzeba narysować wykres A w funkcji ω.
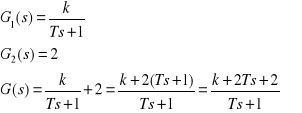
5. Wyznacz transmitancję zastępczą.
PODSTAWY AUTOMATYKI 1 - GRUPA WIESŁAW2
1. Co to jest model układu dynamicznego? Wyjaśnij pojęcie stanu wewnętrznego.
Model - opis (wyobrażenie) obiektu (procesu) rzeczywistego --> różne sposoby opisu.
Model matematyczny - to model:
sformalizowany za pomocą aparatu matematycznego,
produkt abstrakcyjny.
Model matematyczny układu dynamicznego - sformalizowany model układu dynamicznego. Podstawy formalizacji tworzą spostrzeżenia:
- własności obiektów dynamicznych mogą być opisane przy pomocy modeli (sformalizowanych),
- dla opisu własności dynamicznych różnych obiektów dynamicznych poszukuje się takich samych (wspólnych) metod.
Stanem wewnętrznym obiektu nazywa się minimalny zbiór tych wszystkich zmiennych wewnętrznych, których znajomość w danym momencie czasu wraz ze znajomością przyszłych przebiegów czasowych zmiennych wejściowych pozwala na jednoznaczne określenie przyszłych przebiegów czasowych zmiennych wyjściowych.
2. Dla układu sterowania określonego równaniem różniczkowym ![]()
wyznaczyć transmitancję i określić odpowiedź na skok jednostkowy.
Odpowiedź na skok jednostkowy:
3. Co to jest przekształcenie Laplace'a, a co to jest transformata? Podaj przykład transformaty i funkcji oryginalnej.
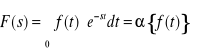
Przekształcenie Laplace'a przyporządkowuje określonej funkcji czasu f(t)
transformatę operatorową F(s) jako funkcję zmiennej zespolonej s. Transformatę oblicza się na podstawie wzoru:
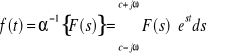
Znając transformatę F(s) można obliczyć oryginał tj. funkcję f(t) drogą przekształcenia odwrotnego:
Transformata: ![]()
Funkcja oryginalna: ![]()
4. Naszkicuj charakterystykę amplitudową układu o transmitancji ![]()
uwzględniając przykładowe wartości ω = 0, 1, 2 i ∞ oraz T = 1.
I dalej trzeba narysować wykres A w funkcji ω.
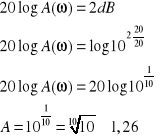
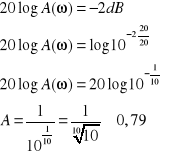
5. Zmiana modułu transmitancji wynosi - 2dB. Oblicz wartość tej zmiany w skali logarytmicznej.
Wyszukiwarka
Podobne podstrony:
FESTO Podstawy automatyzacji
12 Podstawy automatyki Układy sterowania logicznego
podstawy automatyki ćwiczenia lista nr 4b
Podstawy automatyki cz1
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
Podstawy automatyki 2
podstawy automatyki
Podstawy automatyki (w 5) elementy wykonawcze i pomiarowe ppt [tryb zgodnosci]
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
Konspekt wykładów z Podstaw automatyki wykład 5
podstawy automatyki ćwiczenia lista nr 3c
podstawy automatyki ćwiczenia lista nr 4d
Podstawy automatyki
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
Moja ściąga 2. kolos, Szkoła, Semestr 4, Podstawy automatyki
podstawy automatyki ćwiczenia lista nr 4d
Podstawy automatyki (w 1 i 2) p Nieznany
więcej podobnych podstron