Laboratorium z mechaniki ogólnej |
ĆWICZENIE NR3 |
Temat: Ruch płaski. |
Cel ćwiczenia: Symulacja ruchu układu materialnego pod wpływem zewnętrznego momentu wymuszającego ruch w programie Matlab przy określonym warunkach początkowych położenia i prędkości. Sporządzenie wykresów zależności położenia i prędkości ciała A od czasu. |
1. Wprowadzenie teoretyczne.
![]()
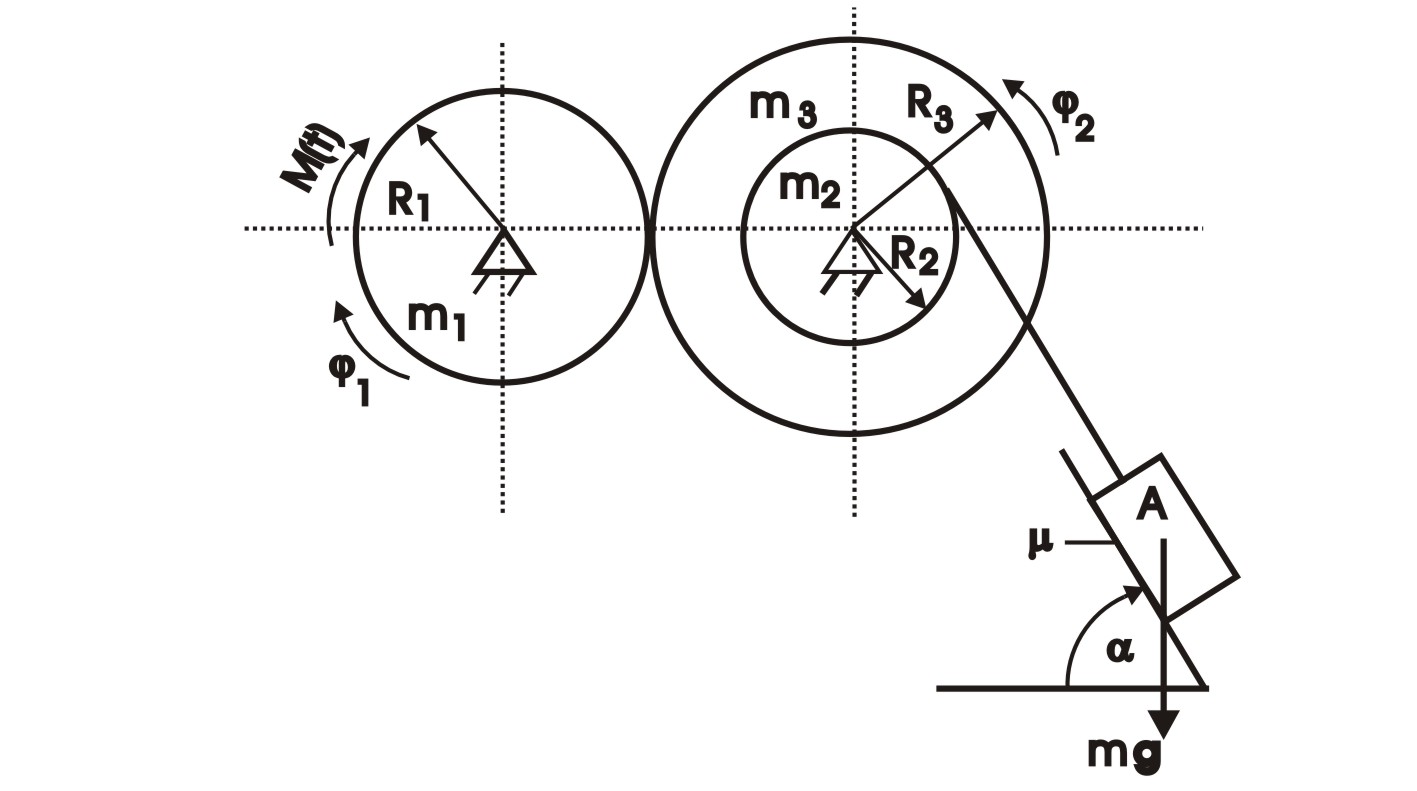
masa ciała A
![]()
masa wału pierwszego
![]()
masa wału drugiego o promieniu ![]()
![]()
masa wału drugiego o promieniu ![]()
![]()
promień wału pierwszego
![]()
promień wału pierwszego
![]()
promień wału pierwszego
![]()
współczynnik tarcia
![]()
kąt
![]()
przyspieszenie ziemskie
![]()
momenty bezwładności dane równaniem (2)
![]()
- rozwiązanie, z którego korzystamy w ćwiczeniu
2. Przebieg ćwiczenia
a. Pierwszy sposób
1. Wydaj polecenie simulink
2. Zbuduj następujący schemat:
3. Ustaw warunki początkowe:Integrator2=0 ![]()
, Integrator1=0 ![]()
4. Opisz blok Fcn1 następującym wzorem:
((g*m*mi*cos(alfa)*u[1]+g*m*sin(alfa)-((u[2]*R3)/(R1*R2)))/(m+J2/R2^2+(J1*R3^2)/(R1^2*R2^2)))
5. Ustaw parametry symulacji: Simulation/Parameters
Start time:0/Stop time:10/ Min step size/Max step size:0.01
6. Ustaw parametry bloku Step:
Step: Step time:5/ Initial value:0 Final value:300/
7. Załóż plik o nazwie dane.m
m=10;
m1=5;
m2=4;
m3=10;
R1=3;
R2=2.5;
R3=5;
mi=0.1;
alfa=1;
g=9.81;
J1=(m1*R1*R1)/2;
J2=(m2*R2*R2)/2+(m3*R3*R3)/2;
8. Uruchom plik wpisując dane
9. Wydaj polecenie whos
10. Uruchom symulację Simulation/Start
11. Sprawdź, jaki powstały wykresy (kliknij na Scope).
b. Drugi sposób
1. Założ pliki tekstowe o nazwie row2t.m
function [dy]=row2t(t,y)
global kroki m m1 m2 m3 R1 R2 R3 mi alfa g J1 J2
if (t>5)
M=300;
else
M=0;
end
kroki=kroki+1;
dy=zeros(2,1);
dy(1)=y(2); %y(1) to jest x,y(2) to jest x',dy(2) to jest x''
dy(2)=-((g*m*mi*cos(alfa)*sign(y(2))+g*m*sin(alfa)-((M*R3)/(R1*R2)))/(m+J2/R2^2+(J1*R3^2)/(R1^2*R2^2)));
2. Drugi plik o nazwie licztot.m
global kroki m m1 m2 m3 R1 R2 R3 mi alfa g J1 J2
m=10;
m1=5;
m2=4;
m3=10;
R1=3;
R2=2.5;
R3=5;
mi=0.1;
alfa=1;
g=9.81;
J1=(m1*R1*R1)/2;
J2=(m2*R2*R2)/2+(m3*R3*R3)/2;
t0=0;t2=20; %przedział czasowy symulacji
x0=[0 0]; %x,v - warunki początkowe
kroki=0;
options = odeset('RelTol',1e-5,'AbsTol',[1e-4 1e-4 1e-5]);
[t,x]=ode45('row2t',t0,t2,x0,options ); %wywołujemy funkcję całkującą z parametrami funkcji row
disp('obliczenia wykonano dla następującej ilości kroków')
kroki
plot(t,x(:,1),t,x(:,2)),title('x,v');
3. Uruchom symulację wpisując słowo licztot
3. Zadania do samodzielnego wykonania
Wyprowadź równanie ruchu
Zmień moment M tak aby działał od 5 s do 12 s o wartości 300
Wyznacz moment bezwładności dla wału II.
Oblicz wartość M, dla której układ pozostaje w równowadze. Podaj wzór, w/g którego ta wartość została obliczona.
Przeprowadź symulację dla obliczonej wartości M. Moment M jest stały w czasie całej symulacji od 0 do 20 s.
Wyszukiwarka
Podobne podstrony:
pascal instrukcje, Lab.nr5, Laboratorium z mechaniki ogólnej
Sprawko - ćw 6a, Politechnika Poznańska, Lab. Pomiary Wielkości Mechanicznych
Wyznaczenie odporności na pękanie materiałów kruchych- metoda MML, Mechanika i Budowa Maszyn PŚK, Me
pascal instrukcje, Lab.nr4, Laboratorium z mechaniki ogólnej
pascal instrukcje, Lab.nr2, Laboratorium z mechaniki ogólnej
KRWPćw9, PŚk, Mechanika
LAB +Ťcinanie, Politechnika, Mechanika gruntów
lab. z mech. płynów !!!, Mechanika Plynow
Mechanika doświadczalna sprawko, PŚk, Mechanika
mechnika lab2 97, PŚk, Mechanika
mechnika lab5 97, PŚk, Mechanika
mlot z wykresami, PŚk, Mechanika
mechnika lab6 97, PŚk, Mechanika
Całka J ćwiczenie 5(1), PŚk, Mechanika
mechnika lab8 97, PŚk, Mechanika
mechanika doświadczalna laboratorium 3, PŚk, Mechanika
więcej podobnych podstron