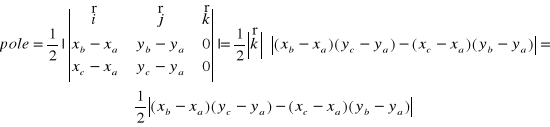
Pole trójkąta to iloczyn wektorowy wektorów odpowiednich boków trójkąta np:
![]()
![]()
Wektor ![]()
to wersor dlatego jego długość jest równa jedności tj.: ![]()
![]()
gdzie symbol oznacza | | - wartość bezwzględną tj. jeśli wyznaczana wartość
![]()
jest ujemna zapisujemy ją jako
![]()
Oznacza to, że zmieniliśmy znak wyrażenia na przeciwny.
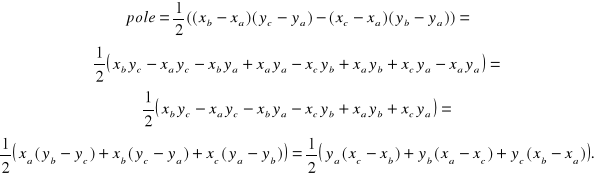
W przypadku, gdy jest ono dodatnie to:
![]()
.
Wyrażenia te można dodatkowo uprościć np.
Powyższe wzory można uogólnić dla dowolnego wielokąta.
Zauważmy funkcja pole zależy od sześciu zmiennych
W naszym przypadku wektor pochodnych cząstkowych jest następujący
![]()
![]()
.
![]()
![]()
Sprawdzić czy zależności dla pola są prawidłowo wyprowadzone.
Jeśli tak to wyznaczmy wszystkie pochodne znając tylko współrzędne punktów trójkąta.
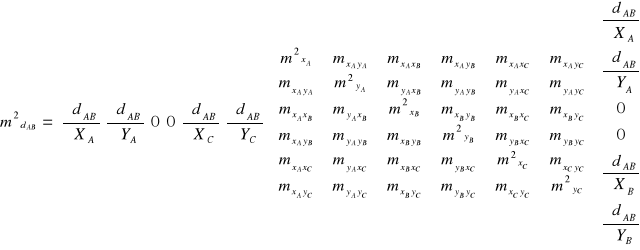
Błąd pola określimy z zależności:
![]()
![]()
- to wektor wierszowy, a ![]()
kolumnowy pochodnych cząstkowych:

Rozważając przypadek błędów boków trójkąta weźmy pod uwagę bok a.
Długość ![]()
boku a to
![]()
Jest to funkcja czterech zmiennych ![]()
.
Ponieważ nie zależy ona od ![]()
to pochodne cząstkowe względem tych zmiennych są zerami.
![]()

Dlaczego tak wyznaczyliśmy tą pochodną.? Dlatego, że jest to funkcja złożona (nawet podwójnie złożona).

Analogicznie


Podsumowując:
![]()


Jeśli wybralibyśmy inny odcinek np. b to pochodne wyznaczamy z analogicznych wzorów. Zastępując odpowiednio współrzędne. Przykładowo:
![]()

![]()

,
Widać, że w porównaniu z poprzednimi w tych zależnościach zamieniliśmy tylko ![]()
na ![]()
i ![]()
na ![]()
.
Jak widać pochodne cząstkowe boku trójkąta (odcinka) można wyznaczyć znając współrzędne jego końców. Tutaj
![]()
Macierz kowariancyjna jest taka jak poprzednio. Stąd
![]()
.
Uzupełnienie
W poniższym zapisie przyjęto ![]()
, ![]()
, itd.
.
W przypadku błędów azymutu i kątów trzeba wyznaczyć pochodne cząstkowe odpowiednich funkcji arctg. Ponieważ
to
![]()
Kąt ![]()
jest różnicą kątów (azymutów) ![]()
i ![]()
.
Kąt ![]()
jest funkcją sześciu zmiennych (azymut czterech)
Różniczkując funkcję![]()
względem zmiennej ![]()
otrzymujemy:

Zauważmy, że pochodna cząstkowa drugiego wyrazu względem ![]()
jest zerem, ponieważ argument tej funkcji nie zależy od zmiennej ![]()
. Funkcja ![]()
jest złożona względem ![]()
(![]()
traktujemy jako stałe). Dlatego


Stąd

Wartość pochodnej oznaczono tutaj symbolem ![]()
. Podobnie postępujemy w przypadku
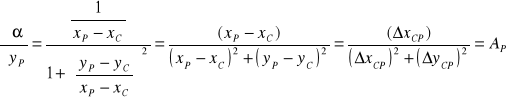
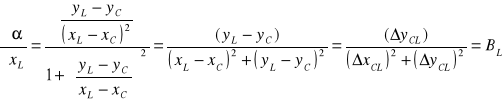

Można pokazać, że
![]()
Wynika to z następujących obliczeń:
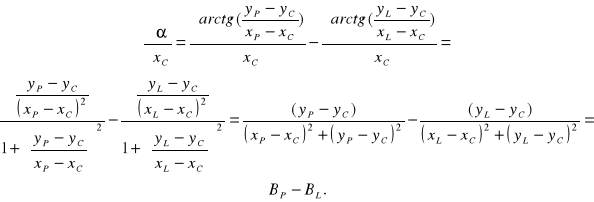
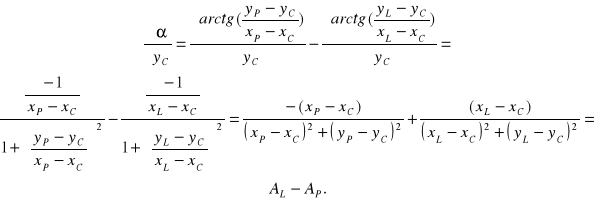
Współczynniki ![]()
, ![]()
, ![]()
, ![]()
itp.: są współczynnikami kierunkowymi lewego i prawego ramienia kąta.
Wyznaczyliśmy sześć pochodnych cząstkowych. Z pochodnych tych formujemy wektor pochodnych ![]()
i jak powyżej wyznaczamy wartość błędu średniego ![]()
.
![]()
.
Tak obliczony błąd wyrażony jest w radianach. Aby wyrazić go w innych jednostkach np. w sekundach trzeba wyrażenie to pomnożyć przez współczynnik przeliczeniowy![]()
![]()
Jeśli błąd ma być wrażony w sekundach wówczas ![]()
itp.
1
(xa,ya)
(xc,yc)
(xb,yb)
A
B
C
a
c
b
C(xC, yC)
β
γ
α
x
y
L(xL, yL)
P(xP, yP)
![]()
Wyszukiwarka
Podobne podstrony:
Z Obliczenia dla sieci kątowej, Geodezja i Kartografia, Rachunek Wyrównawczy
Sieci płaskie, Geodezja i Kartografia, Rachunek Wyrównawczy
Obliczenia na liczbach przybliżonych, Geodezja i Kartografia, Rachunek Wyrównawczy
Ćw. 1 Zastosowanie form rachunkowych Hausbrandta, Geodezja i Kartografia, Rachunek Wyrównawczy
S 7 Równania obserwacji 3, Geodezja i Kartografia, Rachunek Wyrównawczy
Wyrównanie parametryczne - metoda macierzowa, Geodezja i Kartografia, Rachunek Wyrównawczy
Wagi i błędności, Geodezja i Kartografia, Rachunek Wyrównawczy
Wyrównania korelat, Geodezja i Kartografia, Rachunek Wyrównawczy
Ściaga RW, Geodezja i Kartografia, Rachunek Wyrównawczy
Z Wyrównanie obserwacji bezpośrednich, Geodezja i Kartografia, Rachunek Wyrównawczy
Równania ogólne poprawek, Geodezja i Kartografia, Rachunek Wyrównawczy
S 6 Spostrzeżenia niejednakowo dokładne, Geodezja i Kartografia, Rachunek Wyrównawczy
S 6 Spostrzeżenia bezpośrednie, Geodezja i Kartografia, Rachunek Wyrównawczy
Miary dokładności spostrzeżeń, Geodezja i Kartografia, Rachunek Wyrównawczy
S 5 Błedy wstęp, Geodezja i Kartografia, Rachunek Wyrównawczy
Sieci wysokościowe regionalne, Geodezja i Kartografia, Rachunek Wyrównawczy
Podstawowe zasady wyrównania, Geodezja i Kartografia, Rachunek Wyrównawczy
więcej podobnych podstron