****************
1. Systemowa interpretacja różnych form pracy ludzkiej.
Praca bez narzędzi - człowiek oddziałuje na przedmiot z otoczenia rękoma, energią mięśni.
Praca z narzędziami prostymi - narzędzia proste, narzędzia napędzane siła ludzkich mięśni.
Praca z narzędziami złożonymi do których dostarczana jest energia z zewnątrz (energia człowieka tylko do transportu).
Praca z narzędziami złożonym, sterowanymi automatycznie - przedmiot mimo automatyzacji manipulowany ręcznie. Sterowanie: w torze otwartym lub w torze sprzężenia zwrotnego.
Warunki sterowania w torze otwartym:
całkowita znajomość obiektu sterowania
stacjonarność ob. Sterowania
usunięcie wpływu zakłóceń
uwzględnienie warunku początkowego
Sterowanie w sprzężeniu zwrotnym:
sporadyczne (wyłącznik krańcowy)
ciągłe
Praca z narzędziami złożonymi sterowanymi i obsługiwanymi przez roboty. Manipulacja przedmiotem przez roboty. Roboty zaprogramowane przez człowieka.
Praca z manipulatorami śledzącymi, z zewnętrznymi źródłami energii, sterowanymi przez człowieka.
****************
Przyczyny rozwoju robotów.
Czynniki techniczne:
Postęp w konstrukcji elementów automatyki.
Pojawiły się małe silniki o dobrych parametrach.
Rozwój tanich komputerów.
Wzrost zapotrzebowania na manipulowanie przedmiotami niemożliwymi do ręcznego manipulowania (np. ciężkie, niewygodne do przenoszenia, szkodliwe środowisko).
Dążenie do utrzymania jednolitego i wysokiego standardu jakościowego wymaganego przez konkurencję.
Czynniki ekonomiczne:
Instalowanie kapitałochłonnych maszyn - potrzeba wykorzystania ich non-stop (zwiększenie wydajności).
Wzrost kosztów produkcji - praca ludzka droższa.
Rozwój masowości - masowej produkcji.
Czynniki społeczne:
Stale malejąca liczba pracowników do prac monotonnych. Wzrost poziomu wykształcenia. Malejąca stopa przyrostu naturalnego w krajach rozwiniętych.
Powszechne tendencje do wzrostu bezpieczeństwa pracy.
Czynniki socjologiczne:
Czynniki związane podobieństwami maszyny cybernetycznej i człowieka.
****************
Generacje robotów przemysłowych.
Roboty generacji 1.
Całkowity brak sprzężeń zwrotnych od manipulowanego przedmiotu, manipulowanie w torze otwartym względem przedmiotu.
Konieczność precyzyjnego zaprogramowania ruchów ramion manipulatora względem określonego układu współrzędnych.
Konieczność ustabilizowania stanu początkowego manipulowanego przedmiotu.
Najczęściej stosowane roboty na halach produkcyjnych.
Różne rodzaje programowania:
1 klasa - metoda krokowa (małokrokowe) z sekwencyjnym sterowaniem (kolejny krok po sygnale zakończenia poprzedniego).
2 klasa - programowanie metodą krokowa z analogową nadążną regulacją położenia ramion. Dokładność taka na jaką pozwalają czujniki - przeważnie potencjometryczne.
3 klasa - programowane metodą uczenia z cyfrową regulacją położenia ramion. Polega na wprowadzeniu kolejnych punktów trajektorii ruchu ramienia przedstawione w postaci cyfrowej - pobrane z czujników.
Metody uczenia:
Ramiona robota ustawia się ręcznie i otrzymany punkt wprowadza do pamięci. (wybrane punkty)
Ramiona robota steruje się ręcznie do kolejnych punktów trajektorii i wprowadza do pamięci. (system punktów)
Ramiona wodzi się ręcznie ciągle wzdłuż wybranej trajektorii i podczas tego wprowadza do pamięci duża liczbę punktów. (ciągły system sterowania)
Roboty generacji 1,5.
Ruchy ich manipulatorów nie są całkowicie zdeterminowane na etapie projektu, mają wpływ na nie pewne współrzędne obiektu , mierzone przez proste przetworniki sił lub położenia
Wyznaczenie współrzędnych stanu obiektu jest realizowane prostymi środkami.
Na halach produkcyjnych również.
Roboty generacji 2.
Mają informację o środowisku zewnętrznym.
Działają tak aby zoptymalizować działanie.
Nie ma inteligencji.
Ma tak zwaną ograniczoną możliwość rozpoznawania kształtu i położeń. Rozróżniania nielicznych klas przedmiotów.
Działa nadal według określonego programu.
Szybki rozwój.
Złożone systemy przetwarzające.
Roboty generacji 2,5, 3.
Ich system sterowania musi sobie poradzić w przypadkach niepewności. (inteligentny robot)
Nie na hale produkcyjne.
****************
Parametry techniczne robota przemysłowego.
Liczba stopni swobody (można utożsamiać z liczbą napędów).
Schemat kinematyczny manipulatora.
Przestrzeń robocza manipulatora.
Udźwig (manipulatora).
Liczba ramion
Liczba chwytaków ramienia
Bład pozycjonowania
Liczba kroków programowanych
Prędkości: obrotowe i liniowe
****************
Dokładność ruchu i zdolność rozdzielcza mechanizmów robota przemysłowego.
2,5 - 5mm, kroki 0,1 mm?
****************
Podstawowe schematy kinematyczne manipulatorów robotów przemysłowych.
****************
Chwytaki i głowice technologiczne.
Antropomorficzne i hybrydowe (szeregowe, równoległe)
Część robota
Najbardziej różnorodna część robota
Za każdym razem projektowany dla konkretnego zadania
Bezpośrednio współpracuje z manipulowanym przedmiotem
Od niego w sposób istotny zależy dokładność manipulacji
Nie może być wykonana jako część uniwersalna często samemu się wykonuje
Przeznaczenie:
Uchwycenie manipulowanego przedmiotu
Oddziaływanie na manipulowany przedmiot z siła zapobiegającą zmianę jego orientacji względem chwytaka pod względem sił zewnętrznych lub bezwładności
Ewentualna poprawa orientacji manipulowanego przedmiotu
Chwytanie:
Poprzez obejmowanie uniemożliwiające poruszanie nie nadaje się do wszystkich kształty, wielkość
Chwytanie cierne - duża siła by się nie poruszył
Przyssanie - których inaczej się nie da - przyssawka przystosowana do przedmiotu
Magnetyczne - wyłącznie przedmioty ferromagnetyczne (trzeba dużego magnesu)
Elektormagnetyczne proste - prąd chwyta, brak - odpuszacza - przedmioty z mała remanacją magnetyczną
Proste z magnesem trwałym do kompensacji i uwalnia
Magnes trwały i uwalnianie pneumatyczne
Proste z uwalnianiem pneumatycznym
Konstrukcja (uwzględnić):
Miejsce i sposób uchwycenia przedmiotu (z 2 wymiarów wybiera się większy)
Wrażliwość przedmiotu na ścisk
Materiał z którego wykonany jest przedmiot
Temperatura przedmiotu
Masa przedmiotu
Możliwa orientacja przedmiotu w przestrzeni
Głowice technologiczne:
Mogą też służyć do pomiarów
Korpusy - zazwyczaj odlewane duża sztywność. Aluminium i dla większych żeliwo.
Przeguby - zazwyczaj łożyska toczne.
Pary postępowe - toczne, nawet ślizgowe mają elementy toczne.
****************
Podstawowe rodzaje przekładni mechanicznych stosowanych w manipulatorach.
Zębate - maksymalnie do kilku, problemem są luzy
Falowe (harmoniczna) - duże przełożenia (1:320), małe luzy
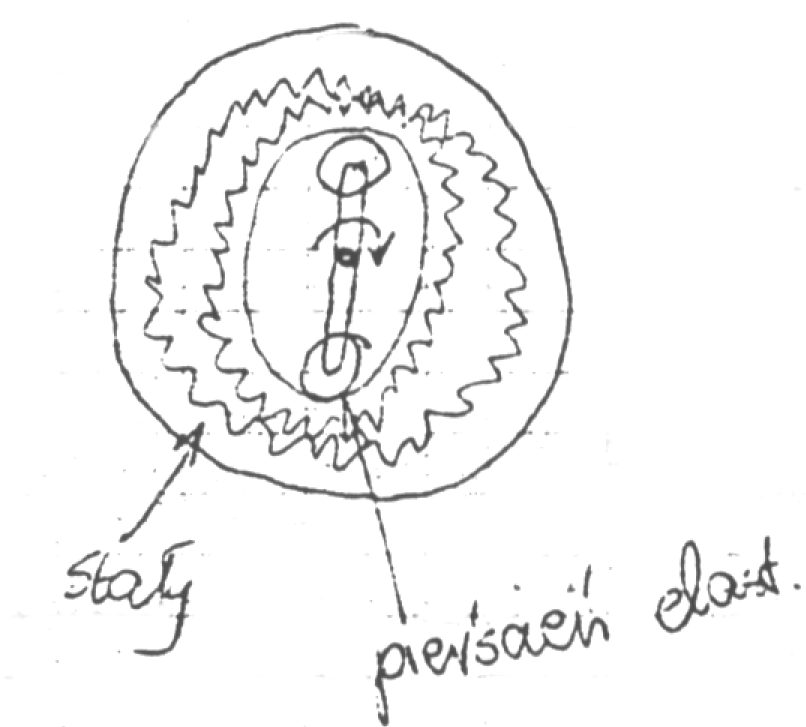
Liczba zębów pierścienia elastycznego jest mniejsza niż części napędzanej.
Obrót części zewnętrznej jest zgodny.
Przełożenie =(elestyczny-zewn)/zew - liczba zębów
W środku rolki
****************
Podstawowe czujniki i układy pomiarowe w robotyce.
Ogranicznik zderzakowy
Wyłączniki drogowe - wyłączają jeśli osiągnięte zostało założone położenie
Wyłączniki krańcowe - są opóźnienia
Potencjometry
Liniowe, obrotowe
Pozwalają ustawić między min a max
Nie trwałe
Działanie stosunkowo proste
Zanik tego typu przetworników w robotach
Przetworniki transformatorowe (zmiana położenia, kąta obrotu na napięcie
Zalety:
Duża dokładność
Mały wpływ zakłóceń na pomiary
Duża pewność ruchowa
Prosty system przetwarzania sygnałów cyfrowych
Stosunkowo niska cena
Wady:
W tych elementach zachodzi potrzeba stosowania stabilizowanych napięć przemiennych (duże częstotliwości 200 do 10kHz)
Cykliczny charakter zmian wielkości wyjściowej przy stałej zmianie wielkości wyjściowej
Rezolwery - układ fazoczuły
Przetworniki fazowo-anologowe - sygnał wprost proporcjonalny do różnicy faz 2 sygn.
Induktosyny (kąt na napięcie) - na jednym pasku (druty nadrukowane) dwa uzwojenia wzbudzenia (sin,cos - przesunięte o 90 ale nie na płytce), na drugim jedno uzw. wyjścia
Cyfrowe pomiary położenia (kwantyzacja zakresu pomiarowego)
Pomiary względne - przyrostowe (dość duża dokładność, problem - wyzerowanie)
Pomiary bezwzględne - liniały kodowe lub tarcze kodowe
Przetworniki sił i naprężeń
Tensometryczne - dokładność 1,5%
Magnetoelektryczny - zmiana wektora magnetyzacji
Przetworniki dotykowe (sygnał po kontakcie)
Wyłącznik krańcowy
„sztuczna skóra”
przetworniki optyczne
detekcja przedmiotów (obecności) o znanej „tożsamości”
zadanie klasyfikacji - przyporządkowanie odpowiedniej klasy
wyznaczenie współrzędnych - w przestrzeni 2 lub 3 wymiarowej
trudności:
szumy świetlne (zmiany natężenia światła)
pulsujące strumienie świetlne - wirujące przedmioty
sam manipulator stwarza cienie
zmiany zdolności odbijania światła (np. brud na urządzeniu)
kontrastowść - marne tło
czujniki fotometryczne
transoptor (przetwornik zbliżenia transportowy) - sprzężenie nadajnika z odbiornikiem - odbija promienie
przetworniki wizyjne obrazu - kamery
laserowe przetworniki kształtu
laserowe pomiary odległości
korelator optyczny - porównuje ze wzorem i określa prawdopodobieństwo zgodności
czujniki fotometryczne
ogranicznik położenia przedmiotu - taca wibracyjna z prostym ogranicznikiem
****************
Systemy wizyjne robotów.
****************
Układy sterowania robotów.
Układ sterowania - w celu realizacji algorytmu aby osiągnąć cel zadania
zapewnienie następstwa kroków
zapewnienie właściwej sekwencji kroków
Warunki sterowania w torze otwartym (znacznie łatwiejsz):
całkowita znajomość obiektu sterowania
stacjonarność ob. Sterowania
usunięcie wpływu zakłóceń
uwzględnienie warunku początkowego
Sterowanie w sprzężeniu zwrotnym:
sporadyczne (wyłącznik krańcowy)
ciągłe
sterowanie point to point
****************
Efektywność ekonomiczna i aspekty społeczne robotyzacji.
Czynniki ekonomiczne:
Instalowanie kapitałochłonnych maszyn - potrzeba wykorzystania ich non-stop (zwiększenie wydajności).
Wzrost kosztów produkcji - praca ludzka droższa.
Rozwój masowości - masowej produkcji.
Czynniki społeczne:
Stale malejąca liczba pracowników do prac monotonnych. Wzrost poziomu wykształcenia. Malejąca stopa przyrostu naturalnego w krajach rozwiniętych.
Powszechne tendencje do wzrostu bezpieczeństwa pracy.
****************
Przestrzeń robocza manipulatora.
Przestrzeń robocza manipulatora jest ograniczona maksymalnymi położeniami chwytaka.
Właściwa - przestrzeń punktów w której może zostać umieszczony środek kiści manipulatora
Rozszerzona - maksymalna (razem z manipulowanym przedmiotem)
Ruchy globalne - ruchy podstawy
Ruchy regionalne - ruchy wykonywane manipulatora względem podstawy
Ruchy lokalne - sprowadzone od odpowiednich ruchów chwytaka
****************
Specyfika urządzeń współpracujących z robotami.
Podajniki, przenośniki, zasobniki, stoły indeksowane
****************
Metody uczenia robotów.
Ramiona robota ustawia się ręcznie i otrzymany punkt wprowadza do pamięci. (wybrane punkty)
Ramiona robota steruje się ręcznie do kolejnych punktów trajektorii i wprowadza do pamięci. (system punktów)
Ramiona wodzi się ręcznie ciągle wzdłuż wybranej trajektorii i podczas tego wprowadza do pamięci duża liczbę punktów. (ciągły system sterowania)
****************
Zastosowanie poza przemysłowe robotów.
Teoretyczne (synteza i projektowanie sztuczna inteligencja, sterowanie ruchem, boimechanika)
Metrologiczne
Robotyka maszyn lokomocyjnych
Medycyna i rehabilitacja
Wojskowe
Elastyczne systemy produkcyjne (FMS)
****************
Metody programowania robotów.
1 klasa - metoda krokowa (małokrokowe) z sekwencyjnym sterowaniem (kolejny krok po sygnale zakończenia poprzedniego).
2 klasa - programowanie metodą krokowa z analogową nadążną regulacją położenia ramion. Dokładność taka na jaką pozwalają czujniki - przeważnie potencjometryczne.
3 klasa - programowane metodą uczenia z cyfrową regulacją położenia ramion. Polega na wprowadzeniu kolejnych punktów trajektorii ruchu ramienia przedstawione w postaci cyfrowej - pobrane z czujników.
****************
Główne części składowe robota przemysłowego.
Układ sterowania (urządzenia peryferyjne, szafa lub pulpit sterowniczy)
Układ napędowy (część manipulacyjna)
Układ mechaniczny (część manipulacyjna)
Wyposażenie technologiczne
Sensory wewnętrzne
Zadajnik pozycji
Kiście
****************
Napędy manipulatorów.
Napędy hydrauliczne:
Zalety:
Łatwość precyzyjnego sterowania
Łatwość uzyskiwania dużych sił
Bardzo dobre właściwości dynamiczne
Możliwość uzyskania dowolnie małych przesunięć, prędkości
Możliwość jednostajnego przesuwania
Mała wrażliwość na przeciążenia i zmianę obciążenia
Łatwość konserwacji (olej smaruje i chłodzi)
Duża pewność ruchowa
Wady:
Duży hałas
Wycieki oleju - wszystko zapaskudzone
W skład napędów hydraulicznych wchodzą
Elementy wykonawcze sprzęgnięte bezpośrednio z ramieniem
Elementy sterujące: wzmacniacze
Źródło przepływu (pompa)
Źródło energii
Dużo elementów dodatkowych (np. zawory, przewody)
Olej (syntetyczny - lepsze właściwości, mineralny - duża zmiana lepkości(T), emulsje olejowo-wodne - zapobiegają tworzeniu się wybuchowej mgiełki olejowej, ciekłe metale - lepkość około wody, niewiele zmienia się z Temp.)
Napędy pneumatyczne:
Zalety:
Bardzo duża pewność ruchu
Większa prostota konstrukcji w porównaniu z hydraulicznymi
Niższa cena urządzeń w porównaniu...
Mała masa urządzeń - pomijalność czynnika roboczego (powietrze)
Powolne narastanie sił
Duża przeciążalność
Iskrobezpieczństwo
Wady:
Trudność uzyskania ruchów jednostajnych (dotyczy ruchów wolnych)
Duża wrażliwość ruchu na zmianę obciążenia
Gwałtowny rozruch przy małym obciążeniu
Znacznie mniejsze siły w stosunku do hydraulicznych
Konieczność zabezpieczenia elementów przed korozją
Trudność sterowanie położenia elementu wykonawczego (ściśliwość, zanieczyszczenie środowiska)
Przy wyższych ciśnieniach rosną koszty
Napędy elektryczny:
Zalety:
Małe znamionowe prędkości obrotowe ale nie tak małe jak w hydraulicznych i trzeba przekładni
Odporność na krótkotrwałe przeciążenia
Małe rozmiary
Mała bezwładność wirnika
Małe czasy rozruchu i hamowania
Niska cena w porównaniu z hydraulicznymi
Prostota zasilania
Duża niezawodność
Prosta konserwacja
Małe wymiary układu sterowania
Wady:
Niekorzystny stosunek siła-masa
Gorsza dynamika niż hydrauliczne
Wrażliwe na długotrwałe przeciążenia
Duże prędkości kątowe znamionowe trza przekładni
Iskrzenie
Głównie silniki prądu stałego, zwykle obcowzbudne.
Zalety:
Duża liczba biegunów niska prędkość
Małe stałe czasowe mała bezwładność
Wady:
Szczotki - trzeba je często wymieniać albo czyścić komutator - szczotki
Iskrzenie na komutatorze
Powstawanie strefy nieczułości tarcie szczotek o komutator
Silniki dyskowe:
Wrażliwe na przeciążenia - nie mają pojemności cieplnej!
Silniki skokowe:
Są małej mocy
Działają w układzie otwartym
Można łączyć z układami hydraulicznymi
Trzeba tłumić drgania co wpływa na dynamikę
****************
Klasyfikacja robotów.
przeznaczenie:
Do badań naukowych
Do celów edukacyjnych
Do celów przemysłowych
Do celu eksploracyjnych
Według stopnia specjalizacji
Wyspecjalizowane (wąskie zakresy)
Specjalne
uniwersalne
Względem rodzaju napędu robota:
Hydrauliczne
Pneumatyczne
Elektryczne
mieszane
Względem właściwości geometrycznych:
Różna konfiguracja geometryczna
Różny zakres obrotu, przemieszczeń liniowych
Praca w różnych układach współrzędnych
Kryteria kinematyczne
Wg stopni swodbody (2,3,4,5)
Względem własności dynamicznych
Względem dokładności: maks 2,5 - 5mm
Względem mobilnosci:
Stacjonarne
Mobilne
Oprogramowanie
Stałoprogramowe
Robot inteligenty
Robot do prostych operacji
Robot do złożonych operacji
Punkt do punktu
****************
Zastosowanie robotów.
Do badań naukowych
Do celów edukacyjnych
Do celów przemysłowych
Do celu eksploracyjnych
Teoretyczne (synteza i projektowanie sztuczna inteligencja, sterowanie ruchem, boimechanika)
Metrologiczne
Robotyka maszyn lokomocyjnych
Medycyna i rehabilitacja
Wojskowe
Elastyczne systemy produkcyjne (FMS)
****************
Liczba stopni manipulatora.
W=6n-5p5-4p4-3p3-2p2-p1
pi - liczba par kinematycznych odpowiednich klas
n - liczba ogniw
w - liczba stopni swobody
klasa I - odbiera jedną możliwość, zostawiając 5
klasa II - odbiera 2 możliwości..
klasa V - pięć możliwości
usytuowanie = położenie (x,y,z) + orientacja (kąty, położenie)
2k - liczba możliwych ruchów
k - liczba członków
****************
Systemy współrzędnych manipulatorów.
Kartezjańskie x, y, z (robot musi się przesuwać - dużo miejsca zajmuje)
Cylindryczne R, φ, z (promień, kąt w bok, wysokość)
Sferyczne R, φ, θ (promień, kąt w bok, kąt w dół)
Torusowi
****************
Perspektywy rozwoju robotów.
Zdolność widzenia, orientacji i rozpoznawania obiektów
Wyposażenie w odpowiednie czujniki
Obróbka informacji uzyskanych z otoczenia w centralnej maszynie liczącej
Wyposażenie w kilka rąk i chwytaków
Zoptymalizowana przez maszynę liczącą praca kilku rąk i chwytaków
Ruchliwość
Zminimalizowana konstrukcja
Ręka antropomorficzna
Porozumiewanie za pomocą języka
****************
Metodyka wprowadzania robotów do przemysłu.
Brak ogólnej metodyki. Wybór optymalnego robota.
Analiza stanowiska:
zadania manipulacyjne
obiekt manipulacji
technologia
przestrzeń i czas
Wybór typu robota:
dokładność
liczba osi sterowanych
liczba kroków
prędkość przemieszczeń
liczba kroków programowych
strefa obsługi
liczba sterowanych funkcji zewnętrznych
ograniczenia procesu manipulacji
analiza ekonomiczna
dobór urządzeń dodatkowych
dobór oprogramowania
techniczno-organizacyjne zabezpieczenie eksploatacji stanowiska
Zasady:
Równoczesności - skraca czas
Ekonomiczności czynności manipulacyjnej
Synchronizacji (współbieżność w czasie)
Optymalnego ustawienia robota
Zgodność robota z wykonywaną praca
Podział procesu na podprocesy
8
Wyszukiwarka
Podobne podstrony:
ROBOTY, Edukacja, studia, Semestr VI, Podstawy Robotyki
czarodziej, Edukacja, studia, Semestr VI, Teoria Sterowania
Cw8LPCPS, Edukacja, studia, Semestr IV, Podstawy i Algorytmy Przetwarzania Sygnałów, Ćwiczenia, Cwic
cps tablica transformat, Edukacja, studia, Semestr IV, Podstawy i Algorytmy Przetwarzania Sygnałów
EWA5, Edukacja, studia, Semestr VI, Elementy Wykonawcze Automatyki
Piapsy zagadnienia, Edukacja, studia, Semestr IV, Podstawy i Algorytmy Przetwarzania Sygnałów
Laboratorium1, Edukacja, studia, Semestr VI, Elementy Wykonawcze Automatyki
teoria sterowania, Edukacja, studia, Semestr VI, Teoria Sterowania
Identyfikacja procesów, Edukacja, studia, Semestr VI, Identyfikacja procesów
TS - projekt, Edukacja, studia, Semestr VI, Teoria Sterowania, Projekt
Pytania z 3 grup z Podstaw Automatyki termin, Edukacja, studia, Semestr III, Podstawy Automatyki, Py
JavaScript- podstawy, Edukacja, studia, Semestr IV, Języki Programowania Wysokiego Poziomu, Java skr
pzs, WAT, SEMESTR VI, podstawy zabezpieczeń sieci, Egzamin
Wybierz, Edukacja, studia, Semestr VIII, Kultura Języka Polskiego, CD1 - 2006 KJP-1 INFORMATYKA, KJP
rodzaje', Edukacja, studia, Semestr VIII, Kultura Języka Polskiego, CD1 - 2006 KJP-1 INFORMATYKA, KJ
Skróty-etc, Edukacja, studia, Semestr VIII, Kultura Języka Polskiego, CD1 - 2006 KJP-1 INFORMATYKA,
ksa4, Edukacja, studia, Semestr VIII, Komputerowe Systemy Automatyki, KSA-lab
więcej podobnych podstron