pytaniarobotykaa
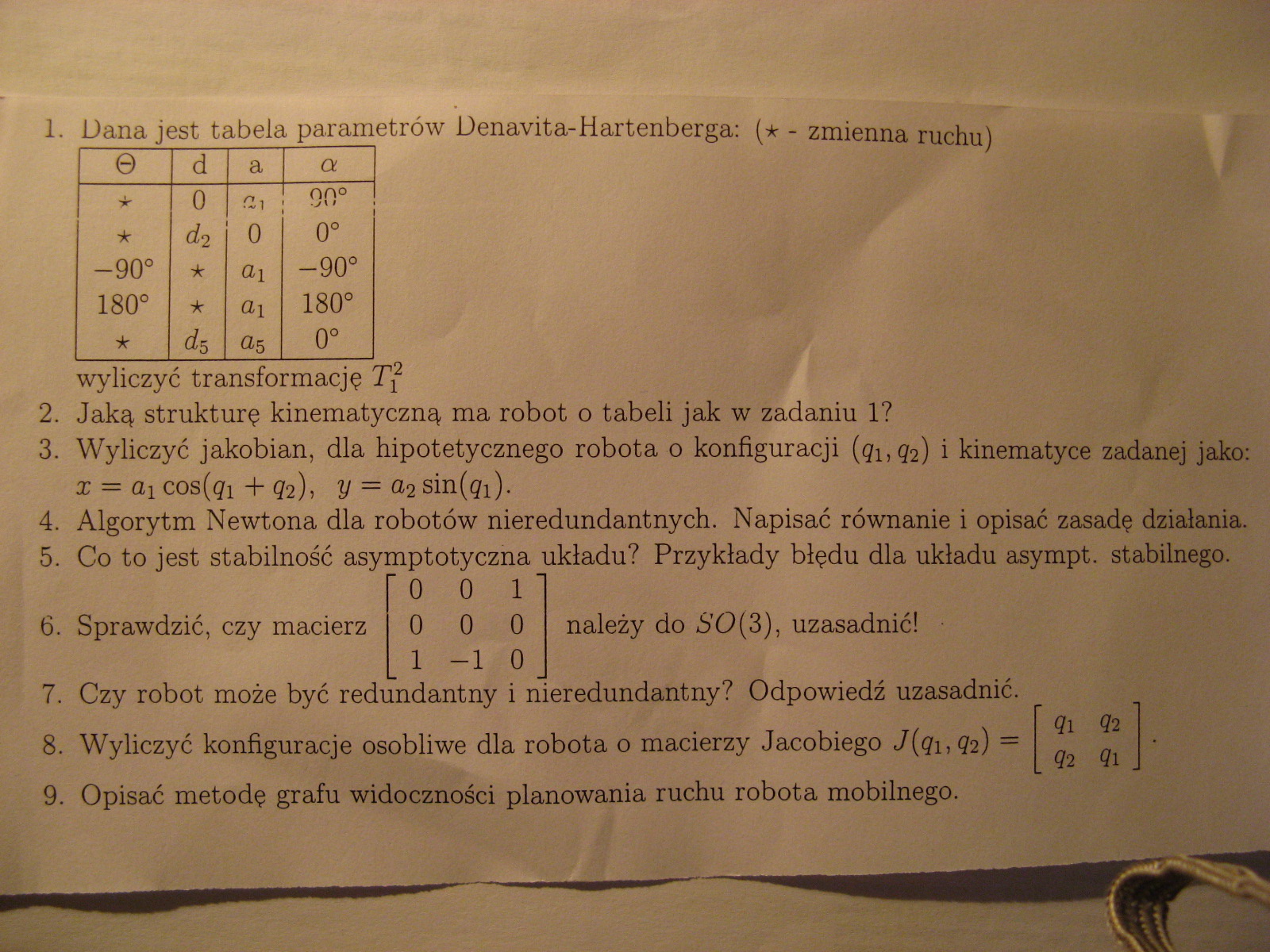
Dana jest tabela parametrów Denavita-Hartenberga: (* - zmienna ruchu)
1.
|
0 |
d |
a |
a |
|
★ -90° 180° ★ |
0 ★ ★ ds |
0 ai di d5 |
°o° ! 0° -90° 180° 0° |
wyliczyć transformację T2
2.
3.
4.
5.
6.
Jaką strukturę kinematyczną ma robot o tabeli jak w zadaniu 1?
Wyliczyć jakobian, dla hipotetycznego robota o konfiguracji (51, q2) i kinematyce zadanej jako: x — d\ cos(?i + q2), y = a2 sin(qi).
Algorytm Newtona dla robotów nieredundantnych. Napisać równanie i opisać zasadę działania. Co to jest stabilność asymptotyczna układu? Przykłady błędu dla układu asympt. stabilnego.
0 0 1 0 0 0 1 -1J0
Sprawdzić, czy macierz
należy do SO(3), uzasadnić!
7. Czy robot może być redundantny i nieredundantny? Odpowiedź uzasadnić.
8. Wyliczyć konfiguracje osobliwe dla robota o macierzy Jacobiego J(qi,q2) =
9. Opisać metodę grafu widoczności planowania ruchu robota mobilnego.
Wyszukiwarka
Podobne podstrony:
IMGG68 1- Dana jest tabela parametrów Denavita-Hartenberga: (★ - zmienna ruchu) e d a a 1
42 (190) Matematyka. Zbiór zadań do liceów i techników. Klasa III *6.36. Prosta k dana jest równanie
Zadanie 1 Dana jest tabela opisująca operację dwuargumenrową na zbiorze 5-elementowym. a.
Spis tabel 2.1 Parametry Denavita-Hartenberga manipulatora................ 8 3.1
Zadanie 3.4. (0-1) Dana jest tabela pracownicy nr
Zadanie 1. Kolokwium 2 gr D Dana jest tabela przedsięwzięcia
26 (88) i Dana jest tabela Osoby(imie, nazwisko, zarobki). Które z następujących instrukcji są popra
IMG689 Operatory Genetyczne Mutacja a Operator mutacji kontrolowany jest przez parametr zmienny w cz
43893 zad23 Przykład 4.5. Dana jest wzrastająca liniowo w przedziale od a do b dystrybuan-ta zmienne
zest3 KOLOKWIUM NR2 ZESTAW U ZAD. I. Dana jest gęstość dwuwymiarowej zmiennej losowej (X. Y): „
ZADANIA NA ZAJĘCIA - FIR Zad.l. Dystrybuanta zmiennej losowej Y dana jest wzorem: 0 dla yź-1 F(y) =
SAD, KOLOKWIUM NR 1 SAD, KOLOKWIUM NR 1 3 Zadanie 1. Dana jest dyskretna zmienna losowa X o następuj
więcej podobnych podstron