Strona0052
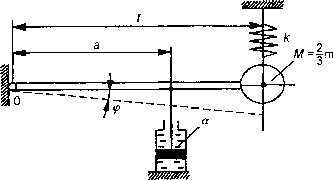
Po podzieleniu równania ruchu przez 70 otrzymamy ę + 2nę + gj>q (p - 0
gdzie:
|
aa2 2 n-—=-ml1 |
, tzn. n = |
er u2 |
|
2m/2 | ||
|
2 * m |
tzn. co0 =. |
£ |
Znając częstości własne drgań swobodnych co0 i współczynnik tłumienia n, można wyznaczyć częstość drgań tłumionych oraz okres drgań:
27t _ 2jt
-«2
Wartość współczynnika proporcjonalności a, przy której układ wykazuje ruch aperiodyczny, wyznaczono z warunku n > <o0» tzn.:
-y £ J—, tak więc a >
2ml2 V m u2
2.7. Drgania wymuszone nietłumione
W wyniku przyjęcia w zależności (2.6) a - 0 i P(i) = cos rot, gdzie To, cy - amplituda i częstość siły wymuszającej, otrzymano równanie drgań wymuszonych nietłumionych w postaci
(2.99)
mx + kx = Pa cos a?t
Wyszukiwarka
Podobne podstrony:
a po podzieleniu licznika i mianownika przez liczbę elementów przestrzeni probabilistycznej otrzymuj
(14) Równanie (13) w postaci różniczkowej ma postać: dQ = Mcp dT - Vdp = Mcv dT + p dV Po podzieleni
CCF20120509�117 Po scałkowaniu równania (6) w granicach od H do 0 otrzymamy szukany czas t - 2H hA0(
Strona0174 8. DRGANIA SKRĘTNE8.1. Równania ruchu, częstości własne, momenty skręcające Drgania układ
Strona0193 193 Dynamiczne równania ruchu mąjąteraz postać: I<P ~ K [ę ~ 9i)= Mo cos
Strona0204 9. DRGANIA GIĘTNE9-1. Równania ruchu. Częstość własna Drgania układu mechanicznego nazywa
80168 skanuj0037 (2) Arii = mmax (9) a po podzieleniu obu stron przez strumień maksymalny funkcja ob
1.4. WODA GRUNTOWA stąd po podzieleniu obu stron przez ik zastępczy współczynnik k przy filtracji po
którego równania ruchu mają następującą postać: x = acoskt, y=bsinkt - gdzie a = 6
Strona0137 137 Przez podstawienie rozwiązań (6.35) do (6.34) i po podzieleniu otrzymanych równań prz
DSC05205 a po podzieleniu obu równań stronami otrzymujemy: (2.61)n, _ Aba Ponieważ obydwie ciecze wy
skrypt060 62coCs (4.8 szana musi być w obu układach równa: / Po uproszczeniu otrzymujemy: co po podz
więcej podobnych podstron