049 3
Równanie stanu 49
zapisane jako wektor x(t), zależą od położenia początkowego i prędkości początkowej, zapisanych jako wektor x(?u), oraz od wymuszenia podawanego na układ począwszy od chwili początkowej t0). Zależność (7.2) przedstawia proces zmian (ewolucję) wektora x(?). Wartość x(t0) reprezentuje, wszystkie skutki zmian wartości przyspieszenia przed chwilą t(l w tym sensie, że jeśli ustalona jest wartość x(/0 ). to na wartości x(t), t > t0 nie wpływają wartości przyspieszenia i/(r) w chwilach poprzednich r</0. Można powiedzieć, że wektor x(rQ) określa stan układu w chwili t0. Di a naszych dalszych rozważań ważne jest, aby stan układu w chwili t0 rozumieć jako taki wektor x(/0), że jego znajomość w pełni wystarcza do wyznaczenia przyszłych wartości x(t), t >/0, tylko na podstawie wartości wymuszeń następujących po chwili /0.
|
wejście KO |
f •> |
KO |
f |
}’(/) wyjście |
|
m |
KO. |
j |
w* |
;
--
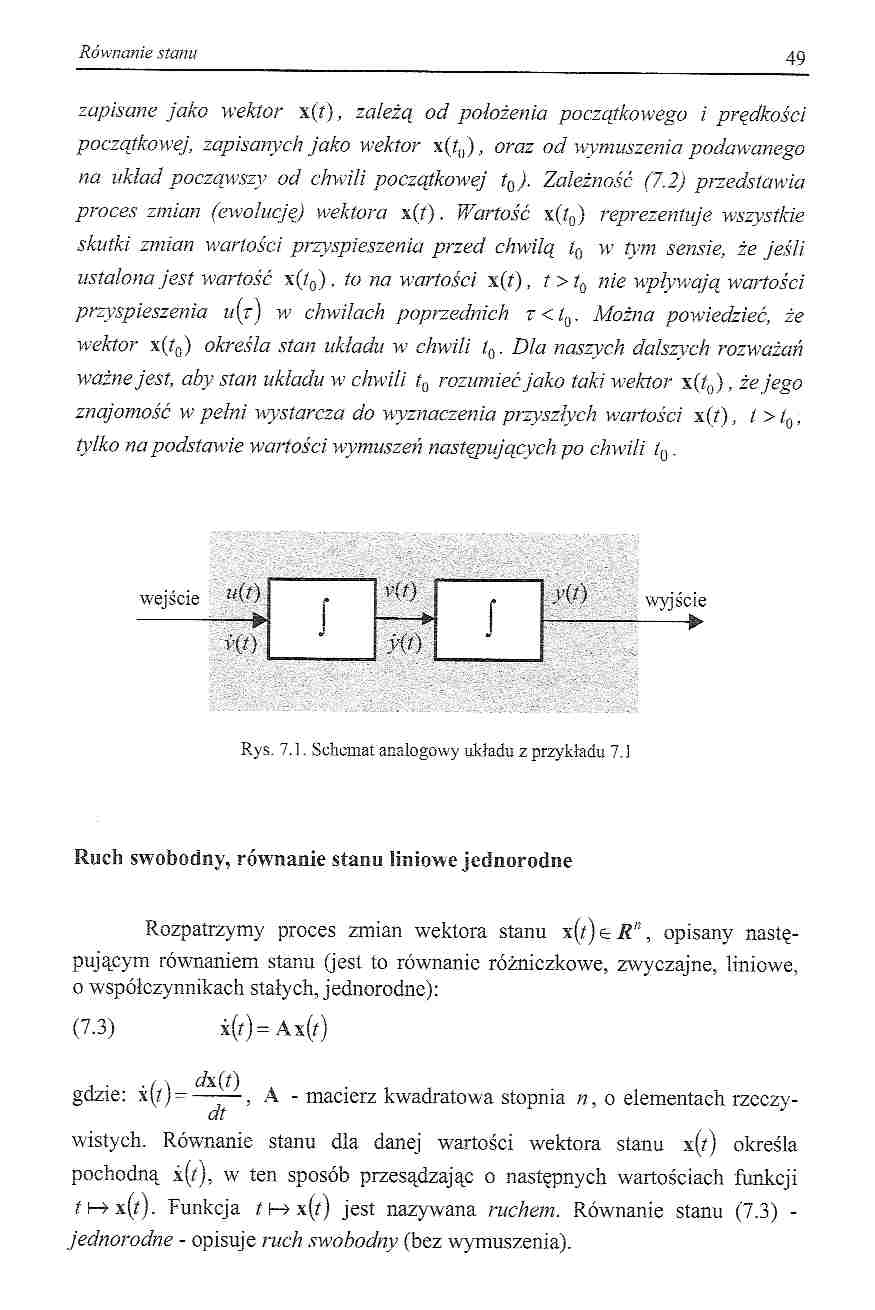
Rys. 7.1. Schemat analogowy układu z przykładu 7.1
Ruch swobodny, równanie stanu liniowe jednorodne
Rozpatrzymy proces zmian wektora stanu x(jf) t Rn, opisany następującym równaniem stanu (jest to równanie różniczkowe, zwyczajne, liniowe, o współczynnikach stałych, jednorodne):
(7.3) x{t)=Ax{t)
dx(t)
dt
gdzie: x(/)-
, A - macierz kwadratowa stopnia n. o elementach rzeczy
wistych. Równanie stanu dla danej wartości wektora stanu x(t) określa pochodną x(f), w ten sposób przesądzając o następnych wartościach funkcji t x(t). Funkcja /(->x(?) jest nazywana ruchem. Równanie stanu (7.3) -jednorodne - opisuje ruch swobodny (bez wymuszenia).
Wyszukiwarka
Podobne podstrony:
0018 2 jądra. Dla stanu podstawowego n = 1 prawdopodobieństwo P(r) jako funkcję odległości r od jądr
Powyższe zmiany zanurzeń zależą od położenia osi obrotu statku. To położenie decyduje, jaka część
Strona0049 jest częstością drgań swobodnych tłumionych. Stałe C-u C2 zależą od warunków początkowych
2 (253) 23. Czy siła ogólna i moment ogólny zależą od położenia bieguna dedukcji. Podać proste
pory roku(1) Pory roku Pory roku zależą od położenia Ziemi względem Słońca. Polska leży w Europie, n
Pory roku D Pory roku Pory roku zależą od położenia Ziemi względem Słońca. Polska leży w Europie. n
strony46 47 Wreszcie trzecia sytuacja (rys. 6c) charakteryzuje stan, gdy zarówno koszty, jak i ceny
~LWF0020 [Rozdzielczo?? Pulpitu] Kierunków daje zależności: Powyższy układ równań można zapisać w fo
Kwas zas1260
/• Zad. I Dla układu Rl.C przedstawionego na schemacie określić: -równania stanu (jako zmienne stanu
Dla układu RLC przedstawionego na schemacie określić: -równania stanu (jako zmienne stanu przyjąć pr
więcej podobnych podstron