310 311
Programowanie wypukłe i kwadratowe

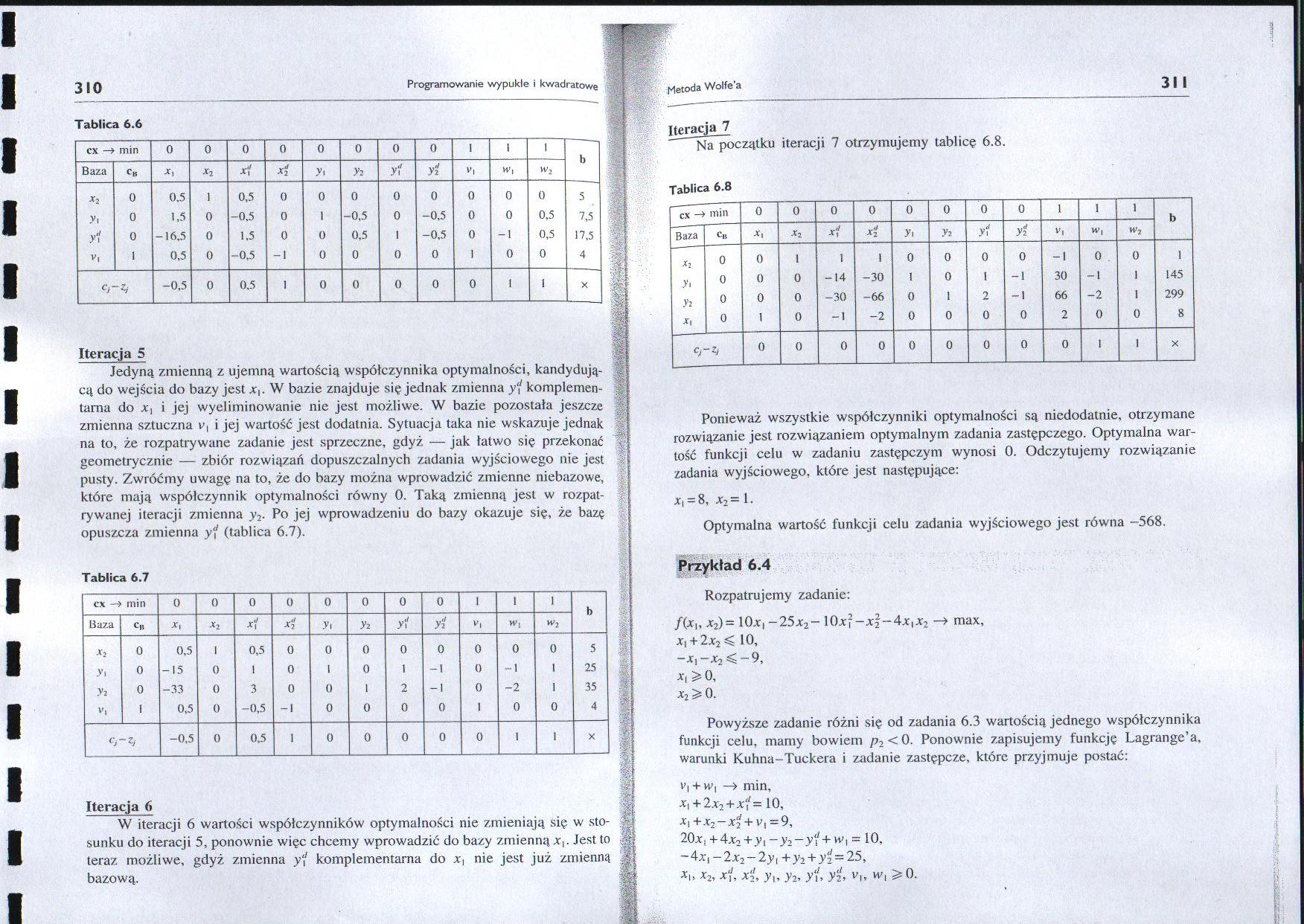
Tablica 6.6
|
cx — |
min |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
b |
|
Baza |
Cb |
*1 |
*2 |
r<! x l |
*2 |
yi |
Si |
yi |
V| |
w, |
Wj | ||
|
*2 |
0 |
0.5 |
1 |
0,5 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
5 |
|
V| |
0 |
1,5 |
0 |
-0,5 |
0 |
i |
-0,5 |
0 |
-0,5 |
0 |
0 |
0,5 |
7,5 |
|
Sl |
0 |
-16,5 |
0 |
1.5 |
0 |
0 |
0,5 |
1 |
-0,5 |
0 |
-1 |
0,5 |
17,5 |
|
V, |
1 |
0,5 |
0 |
-0,5 |
-1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
4 |
|
Cj- |
“ Zj |
-0,5 |
0 |
0,5 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
X |

Iteracja 5
Jedyną zmienną z ujemną wartością współczynnika optymalności, kandydującą do wejścia do bazy jest *,. W bazie znajduje się jednak zmienna y‘! komplementarna do jc, i jej wyeliminowanie nie jest możliwe. W bazie pozostała jeszcze zmienna sztuczna v, i jej wartość jest dodatnia. Sytuacja taka nie wskazuje jednak na to, że rozpatrywane zadanie jest sprzeczne, gdyż — jak łatwo się przekonać geometrycznie — zbiór rozwiązań dopuszczalnych zadania wyjściowego nie jest pusty. Zwróćmy uwagę na to, że do bazy można wprowadzić zmienne niebazowe, które mają współczynnik optymalności równy 0. Taką zmienną jest w rozpatrywanej iteracji zmienna y2. Po jej wprowadzeniu do bazy okazuje się, że bazę opuszcza zmienna y'j (tablica 6.7).
Tablica 6.7
|
cx —) |
min |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 | |
|
baza |
Cl. |
*1 |
*2 |
yi! |
xi |
y< |
y2 |
Si |
yi |
V| |
W2 | ||
|
*2 |
0 |
0,5 |
1 |
0,5 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
5 |
|
.Vi |
0 |
-15 |
0 |
1 |
0 |
i |
0 |
t |
-1 |
0 |
-1 |
1 |
25 |
|
yi |
0 |
-33 |
0 |
3 |
0 |
0 |
i |
2 |
-1 |
0 |
-2 |
1 |
35 |
|
V, |
1 |
0,5 |
0 |
-0,5 |
-1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
4 |
|
<7- |
'Z; |
-0,5 |
0 |
0,5 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
X |
Iteracja 6
W iteracji 6 wartości współczynników optymalności nie zmieniają się w stosunku do iteracji 5, ponownie więc chcemy wprowadzić do bazy zmienną*,. Jest to teraz możliwe, gdyż zmienna y‘l komplementarna do *, nie jest już zmienną bazową.
Iteracja 7
Na początku iteracji 7 otrzymujemy tablicę 6.8.
Tablica 6.8
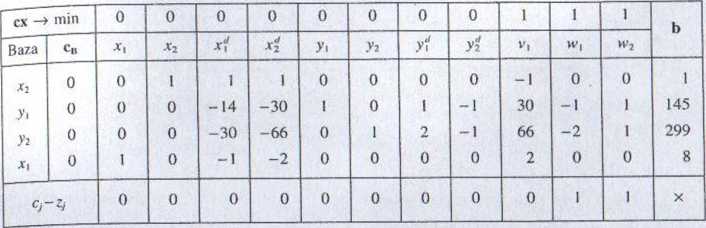
Ponieważ wszystkie współczynniki optymalności są nicdodatnie, otrzymane rozwiązanie jest rozwiązaniem optymalnym zadania zastępczego. Optymalna wartość funkcji celu w zadaniu zastępczym wynosi 0. Odczytujemy rozwiązanie zadania wyjściowego, które jest następujące:
x, = 8, x2 = 1 ■
Optymalna wartość funkcji celu zadania wyjściowego jest równa -568.
Przykład 6.4
Rozpatrujemy zadanie:
/(*,, x2)= 10x| —25j:2— 10xf — jcj — 4x,x2 -> max, x, + 2x2 10,
-xt-x2 <-9, r, >0,
*2 > 0.
Powyższe zadanie różni się od zadania 6.3 wartością jednego współczynnika funkcji celu, mamy bowiem p2<0. Ponownie zapisujemy funkcję Lagrange’a, warunki Kuhna-Tuckera i zadanie zastępcze, które przyjmuje postać:
Vi + vy, —> min, x[ + 2x1+x‘{= 10, xi+x2-x2 + vl =9,
20x.+4jc2+y,-y2-yf-MV| = 10,
— 4x | — 2x2 — 2y | + y2 + y 2 ~ 25,
*1. x2, xi, xi, yu y2, yi, yi, v,, w, Ss 0.
Wyszukiwarka
Podobne podstrony:
316 317 316 Programowanie wypukłe i kwadratowe Tablica 6.9 Notowania spółka 1 spółka 2 spółka
292 293 Programowanie wypukłe i kwadratowe292 Scharakteryzujemy wykorzystywane dalej funkcje wypukłe
290 291 290 Programowanie wypukłe i kwadratowe Rysunek 6.3 290 Programowanie wypukłe i kwadratowe W
294 295 294 Programowanie wypukłe i kwadratowe Rysunek 6.5 kierunku wzrostu funkcji celu określamy p
296 297 296 Programowanie wypukłe i kwadratowe Ponadto mówimy, że spełniony jest warunek Slatera, je
298 299 Programowanie wypukłe i kwadratowe298 Podzbiór 2 Pierwszy warunek jest spełniony jako równoś
300 301 300 Programowanie wypukłe i kwadratowe Rysunek 6.12 A W t Podzbiór 1 Jeżeli gi>0, g2>
302 303 302 Programowanie wypukłe i kwadratowe Sprowadzimy zadanie do ogólnej postaci programowania
304 305 304 Programowanie wypukłe i kwadratowe Warunek 3 Warunek ten stanowi powtórzenie warunków
306 307 306 Programowanie wypukłe i kwadratowe • i 306 Programowanie wypukłe i kwadratowe
308 309 308 Programowanie wypukłe i kwadratowe tarnej x?2 i niemożność jej wymiany ze zmienną y2 (wa
312 313 312 Programowanie wypukłe i kwadratowe 8 n
314 315 314 Programowanie wypukłe i kwadratowi Oznaczmy symbolem /?,(/■) cenę / -tej akcji osiągnięt
318 319 318 Programowanie wypukłe i kwadratoweFunkcja celu min, f(xj, Aj, Aj, A.j, A5) = [A
320 321 320 Programowanie wypukłe i kwadratowe Funkcje celu: • minimalizacja ryzyka
322 323 322 Programowanie wypukłe i kwadratowe Rozpatrywane zadanie nie jest zadaniem wektorowej mak
050 051 2 50 Programowanie liniowe Pierwsza tablica simpleksowa ma postać (tablica 1.14): Tablica 1.
więcej podobnych podstron