320 321
320 Programowanie wypukłe i kwadratowe
Funkcje celu:
• minimalizacja ryzyka portfela:
|
11,4312 |
1,1701 |
0,1232 |
1,6619 |
2,0254 |
|
1,1701 |
7,7723 |
0,4983 |
1,1374 |
1.7056 |
|
0,1232 |
0,4983 |
5.1598 |
-1,3094 |
-0,6307 |
|
1,6619 |
1,1374 |
- 1,3094 |
20,2858 |
2,2824 |
|
2,0254 |
1,7056 |
-0,6307 |
2,2824 |
4,3189 |
• maksymalizacja oczekiwanej stopy zysku portfela: 0.94.r, + 1,20x2-0,02xy¥0,81 x4+ 0,45 x5 —> max.
Warunki ograniczające:
• udziały akcji w portfelu sumują się do jedności: x, + x2+x3+x4+x5 = 1,
• warunki nieujemności:
x,, x2, x3, x4, x5 > 0.
Rozwiązanie optymalne
Chcąc znaleźć rozwiązania optymalne wektorowo, zastosujemy metodę satysfakcjonującego poziomu kryteriów opisaną w podrozdziale 4.4.2. Będziemy minimalizować pierwszą funkcję celu, przyjmując różne poziomy oczekiwanego zysku portfela. Rozwiążemy ciąg następujących zadań w postaci przystosowanej do wykorzystania programu KWADRAT.EXE:
- [.*•, x2 x, x4 jt5]
|
11,4312 |
1,1701 |
0,1232 |
1,6619 |
2,0254 |
|
1,1701 |
7,7723 |
0,4983 |
1,1374 |
1,7056 |
|
0,1232 |
0,4983 |
5,1598 |
- 1,3094 |
-0,6307 |
|
1,6619 |
1.1374 |
- 1,3094 |
20.2858 |
2.2824 |
|
2,0254 |
1,7056 |
-0.6307 |
2,2824 |
4,3189 |
[.<■, x2 xj xA jcs)t —> max.
przy warunkach ograniczających:
- 0,94x, - 1,20 x2 + 0,02x, - 0,81 x4 - 0,45 x5 - r0,
X|+X2 +x3 + x4 + x5 < 1,
—x, — x2 — x3 — x4 — x5 1,
X|, x2, x3, x4, x5 > 0.
Wykonamy obliczenia dla wartości r0, wyszczególnionych w tablicy 6.13, w której zamieszczamy również wyniki obliczeń. Widzimy, że obniżając poziom oczekiwanego zysku, otrzymujemy portfele o coraz mniejszym ryzyku. Portfele przedstawione w tablicy 6.13 to przykładowe rozwiązania sprawne dwukryterial-ncgo zadania poszukiwania optymalnego portfela akcji. Wszystkich sprawnych portfeli jest nieskończenie wiele.
Tablica 6.13
|
Portfel |
Parametry portfeli wyznaczonych dla założonych wartości r„ | ||||||
|
r<> |
*V |
X, |
*2 |
-*4 |
*5 | ||
|
p, |
1,2 |
2,79 |
0 |
1 |
0 |
0 |
0 |
|
Pi |
1,15 |
2,42 |
0,1841 |
0,8104 |
0 |
0,0054 |
0 |
|
p> |
1,1 |
2,20 |
0.2527 |
0,6594 |
0 |
0,0879 |
0 |
|
p& |
1.0 |
2,00 |
0,2468 |
0,5391 |
0,0285 |
0,1060 |
0,0797 |
|
Pf, |
0,9 |
1,83 |
0,2171 |
0,4671 |
0,0897 |
0,0986 |
0,1275 |
|
p„ |
0,8 |
1,67 |
0,1874 |
0,3951 |
0,1510 |
0,0911 |
0,1754 |
|
p-, |
0,7 |
1,53 |
0,1577 |
0,3231 |
0,2122 |
0,0837 |
0,2233 |
|
p» |
0,6 |
1.43 |
0,1280 |
0,2511 |
0.2734 |
0,0763 |
0,2711 |
|
p. |
0,5 |
1,36 |
0,0984 |
0,179! |
0,3347 |
0,0689 |
0,3190 |
|
P10 |
0.4 |
1.34 |
0,0687 |
0,1071 |
0,3959 |
0,0615 |
0,3668 |
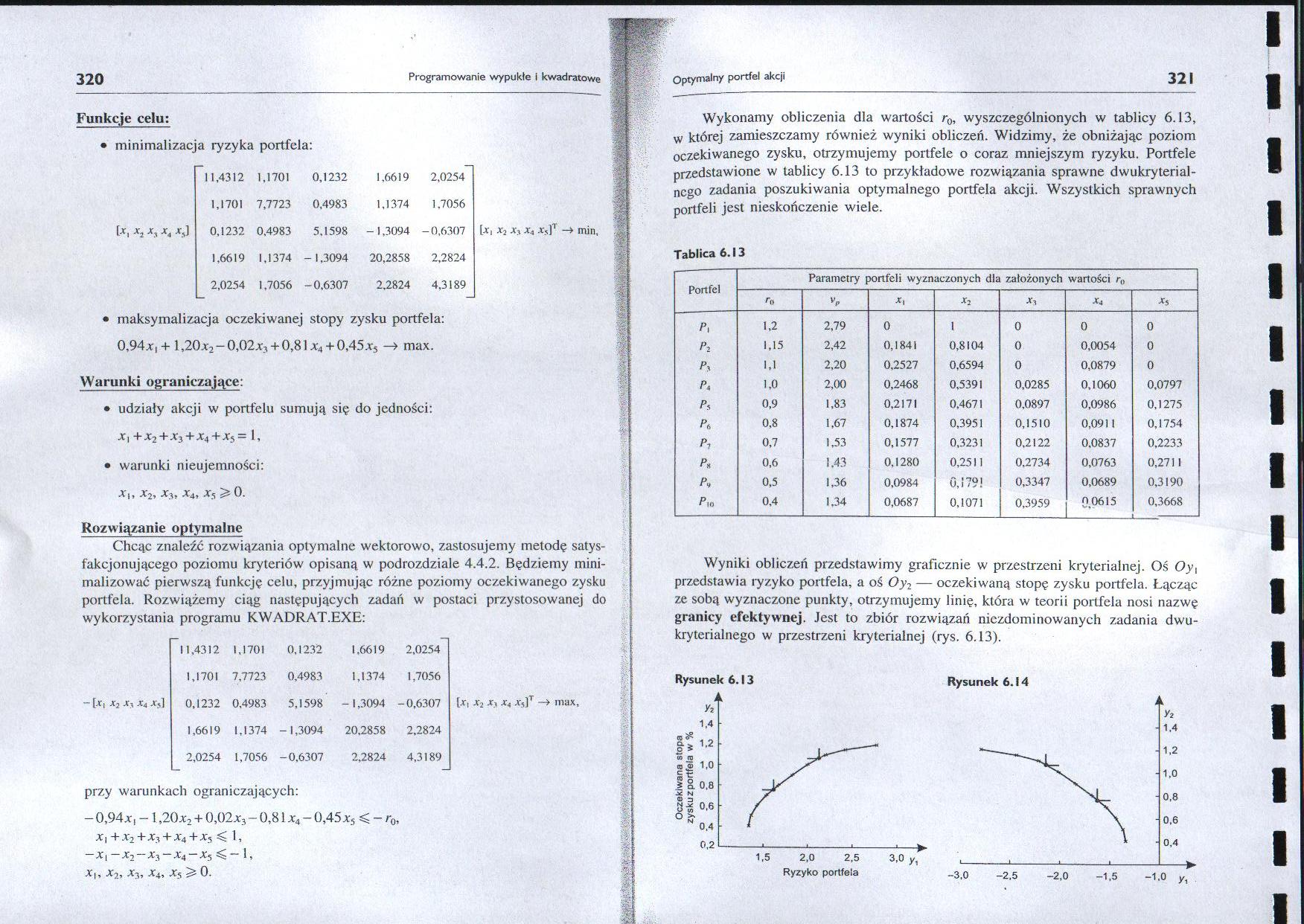
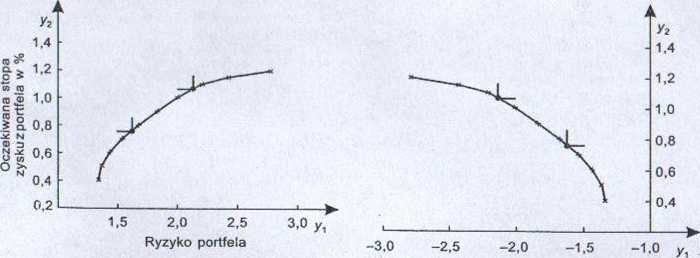
Wyniki obliczeń przedstawimy graficznie w przestrzeni kryterialnej. Oś Oy, przedstawia ryzyko portfela, a oś Oy2 — oczekiwaną stopę zysku portfela. Łącząc ze sobą wyznaczone punkty, otrzymujemy linię, która w teorii portfela nosi nazwę granicy efektywnej. Jest to zbiór rozwiązań niczdominowanych zadania dwu-kryterialnego w przestrzeni kryterialnej (rys. 6.13).
Rysunek 6.13 Rysunek 6.14
Wyszukiwarka
Podobne podstrony:
294 295 294 Programowanie wypukłe i kwadratowe Rysunek 6.5 kierunku wzrostu funkcji celu określamy p
292 293 Programowanie wypukłe i kwadratowe292 Scharakteryzujemy wykorzystywane dalej funkcje wypukłe
318 319 318 Programowanie wypukłe i kwadratoweFunkcja celu min, f(xj, Aj, Aj, A.j, A5) = [A
img383 (3) !. Rozwiązać powyższy program metodą geometryczną. 2. Funkcję celu zmieniono następująco:
290 291 290 Programowanie wypukłe i kwadratowe Rysunek 6.3 290 Programowanie wypukłe i kwadratowe W
296 297 296 Programowanie wypukłe i kwadratowe Ponadto mówimy, że spełniony jest warunek Slatera, je
298 299 Programowanie wypukłe i kwadratowe298 Podzbiór 2 Pierwszy warunek jest spełniony jako równoś
300 301 300 Programowanie wypukłe i kwadratowe Rysunek 6.12 A W t Podzbiór 1 Jeżeli gi>0, g2>
302 303 302 Programowanie wypukłe i kwadratowe Sprowadzimy zadanie do ogólnej postaci programowania
304 305 304 Programowanie wypukłe i kwadratowe Warunek 3 Warunek ten stanowi powtórzenie warunków
306 307 306 Programowanie wypukłe i kwadratowe • i 306 Programowanie wypukłe i kwadratowe
308 309 308 Programowanie wypukłe i kwadratowe tarnej x?2 i niemożność jej wymiany ze zmienną y2 (wa
310 311 310 Programowanie wypukłe i kwadratowe Tablica 6.6 cx
312 313 312 Programowanie wypukłe i kwadratowe 8 n
314 315 314 Programowanie wypukłe i kwadratowi Oznaczmy symbolem /?,(/■) cenę / -tej akcji osiągnięt
316 317 316 Programowanie wypukłe i kwadratowe Tablica 6.9 Notowania spółka 1 spółka 2 spółka
322 323 322 Programowanie wypukłe i kwadratowe Rozpatrywane zadanie nie jest zadaniem wektorowej mak
więcej podobnych podstron