Kolendowicz 7
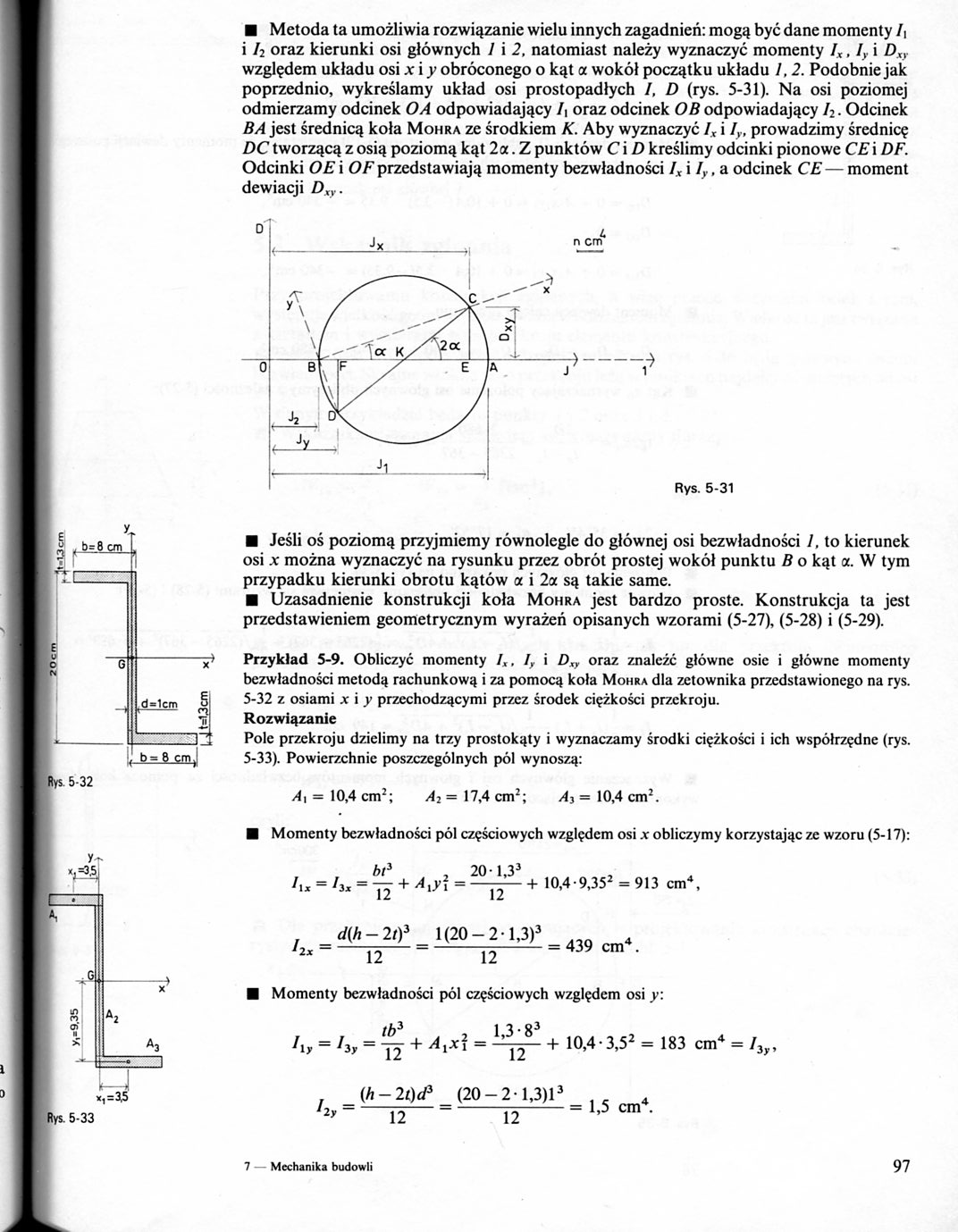
■ Metoda ta umożliwia rozwiązanie wielu innych zagadnień: mogą być dane momenty /, i li oraz kierunki osi głównych 1 i 2, natomiast należy wyznaczyć momenty Ix, ly i Dxy względem układu osi x i y obróconego o kąt a wokół początku układu 1,2. Podobnie jak poprzednio, wykreślamy układ osi prostopadłych I, D (rys. 5-31). Na osi poziomej odmierzamy odcinek O A odpowiadający I\ oraz odcinek OB odpowiadający I2. Odcinek BA jest średnicą koła Mohra ze środkiem K. Aby wyznaczyć lx i /,, prowadzimy średnicę DC tworzącą z osią poziomą kąt 2a. Z punktów C i D kreślimy odcinki pionowe CE i DF. Odcinki OE i OF przedstawiają momenty bezwładności Ix i ly, a odcinek CE — moment dewiacji Dxy.
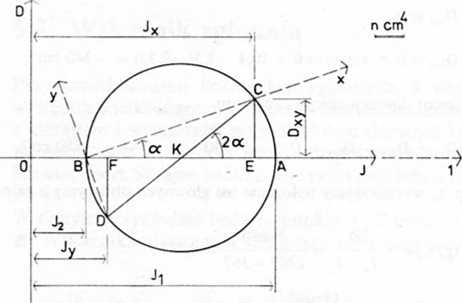
Rys. 5-31
■ Jeśli oś poziomą przyjmiemy równolegle do głównej osi bezwładności /, to kierunek osi x można wyznaczyć na rysunku przez obrót prostej wokół punktu B o kąt a. W tym przypadku kierunki obrotu kątów a i 2a są takie same.
■ Uzasadnienie konstrukcji koła Mohra jest bardzo proste. Konstrukcja ta jest przedstawieniem geometrycznym wyrażeń opisanych wzorami (5-27), (5-28) i (5-29).
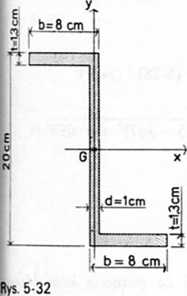
Przykład 5-9. Obliczyć momenty Ix. Iy i Dxy oraz znaleźć główne osie i główne momenty bezwładności metodą rachunkową i za pomocą kola Mohra dla zetownika przedstawionego na rys. 5-32 z osiami x i y przechodzącymi przez środek ciężkości przekroju.
Rozwiązanie
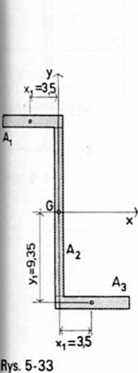
Pole przekroju dzielimy na trzy prostokąty i wyznaczamy środki ciężkości i ich współrzędne (rys. 5-33). Powierzchnie poszczególnych pól wynoszą:
A i = 10,4 cm2; A2 = 17,4 cm2; A} = 10,4 cm2.
■ Momenty bezwładności pól częściowych względem osi x obliczymy korzystając ze wzoru (5-17):
bt3 , 20-1,33
'u = '3* = -^ + ^ = —ij— + 10.4-9,352 = 913 cm4,
, d(h-2t)3 1(20 — 2-1,3)3 _ 4
hx =-j2-=-j2-= 439 cm •
Momenty bezwładności pól częściowych względem osi y:
, , tb3 a 2 1,3 - 83
= I3y=~rt + AiXi =
12
12
+ 10,4-3,52 = 183 cm“ = /,„,
, (h-2t)d3 (20 — 2-1,3)13 1C 4
l2y =---=-77-= 1,5 cm
12
12
7 Mechanika budowli
97
Wyszukiwarka
Podobne podstrony:
24 luty 07 (3) Metoda Culmana umożliwia rozwiązanie graficzne zagadnienia równowagi czterech sił o z
dane ze wszystkich elektrod przy obliczaniu wartości jednego punktu na mapie. Metoda ta umożliwia wy
DSC00516 (10) Barrows spodziewał się, że metoda ta: Zintegruje wiedzę z wielu dziedzin medycyny i&nb
Metoda PLC (Mieszano-całkowito liczbowa) Metoda ta może rozwiązać podstawowe problemy: 1.
100u93 również innych zwierzą! mogą być badane według dwóch schematów: jako badanie rutynowe (skróco
1 O pewnej modyfikacji testu adaptacyjnego... W wielu przypadkach pomocne mogą być testy adaptacyjne
481 2 12.4. ROZWIĄZANIA ELEKTROWNI WODNYCH spiętrzającymi mogą być wystarczające do regulacji dobowe
056 057 7.5. Przycisk MetodaB - Opcja ta umożliwia zmianą metody prognozowania w wybranym wierszu. D
73051 stat Paget resize 74 5.2 Zagadnienie optymalizacji metodą MC Najprostszym rozwiązaniem proble
10. Obwody prądu stałego 1.7. Rozwiązywanie obwodów przy użyciu metody prądów Oczkowych Metoda ta
Problem transportowy :<Metoda potencjałów Metoda ta służy do sprawdzenia optymalności rozwiązania
CCF20090120�118 w jakich kierunkach drążyć tunel w punktach A i D. Metoda ta dowodzi, że powyższy pr
CCF20090120�123 na dwie sprawy: 1. metodę tę można zastosować do zagadnienia przebicia tunelu (ryc.
Scan04 42 Problemy teoretyczne sach statystycznych i wielu innych dziedzinach życia codziennego. Ta
img199�01 djvu 169 Czy liż zawsze w niezbędnej leżeć będziem nocy? Niech ta febra nas z wielu wybawi
więcej podobnych podstron